
Tracking Design of an Uncertain Autonomous Underwater Vehicle with Input Saturations by Adaptive Regression Matrix-Based Fixed-Time Control


Abstract
:1. Introduction
2. System Modeling and Problem Formulation
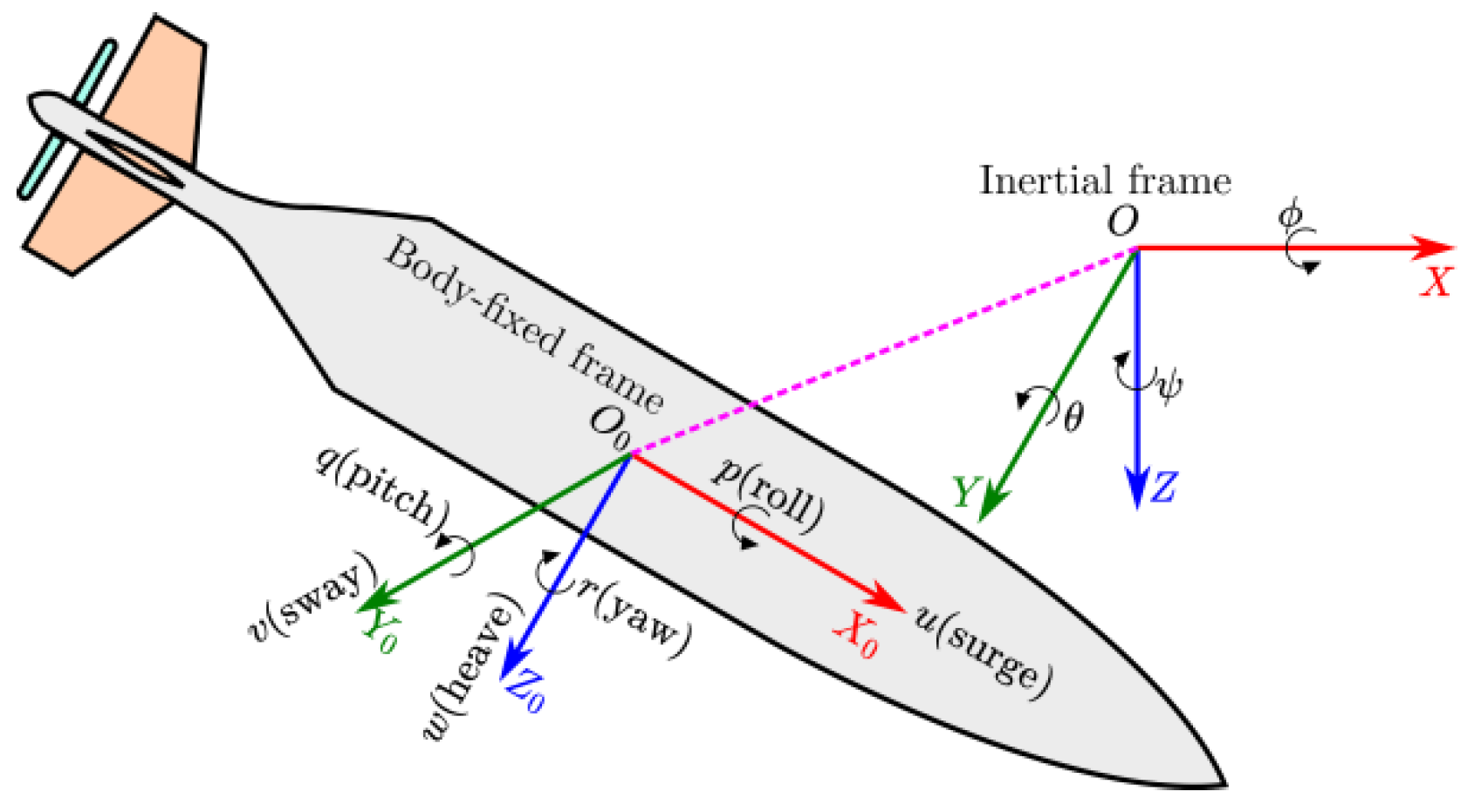
2.1. System Modeling
- (1)
- Kinematic model
- (2)
- Dynamic model
- (3)
- Transformed system model
2.2. Problem Formulation
- P1: As is a skew-symmetric matrix, i.e.,
- P2: , where is a positive constant.
- P3: , where is a positive constant.
- P4: where and represent skew-symmetric and non-skew-symmetric matrices, respectively, and is a scalar chosen such that is minimized.
- P5: This is obtained from property P2, where is a positive constant.
3. Adaptive Regression Matrix-Based Fixed-Time Controller Design and Stability Analysis
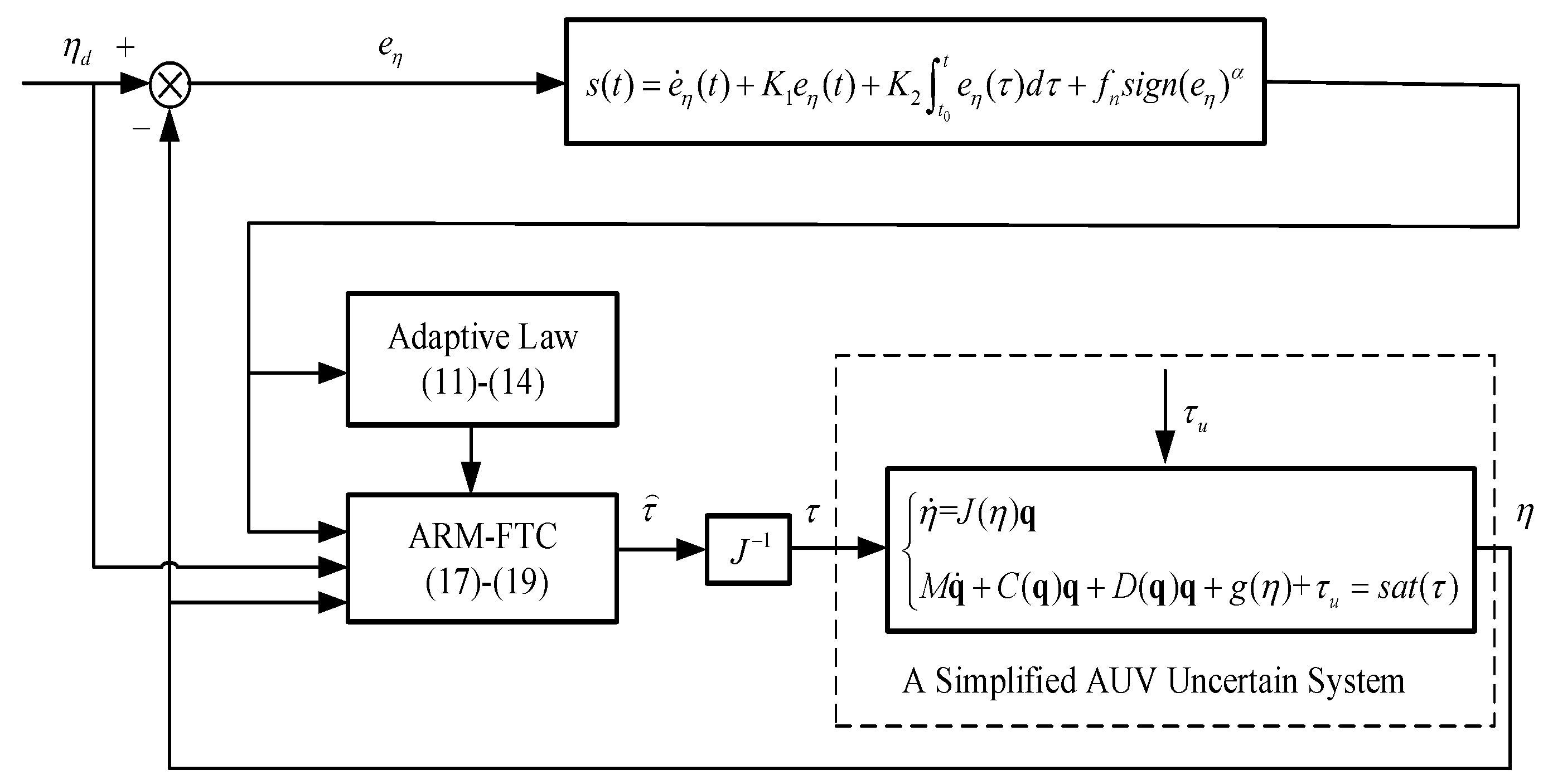
3.1. Controller Design
3.2. Stability Analysis
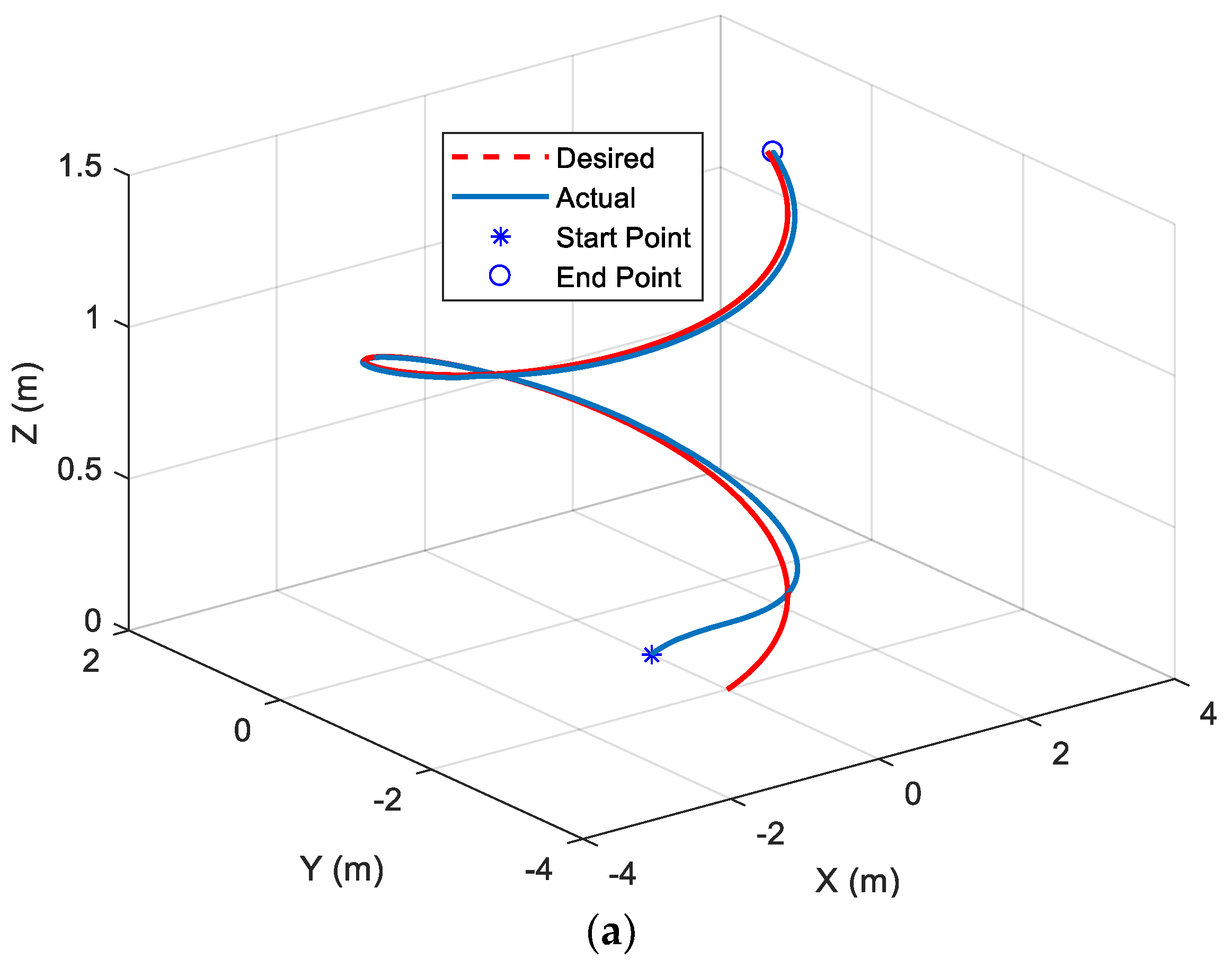
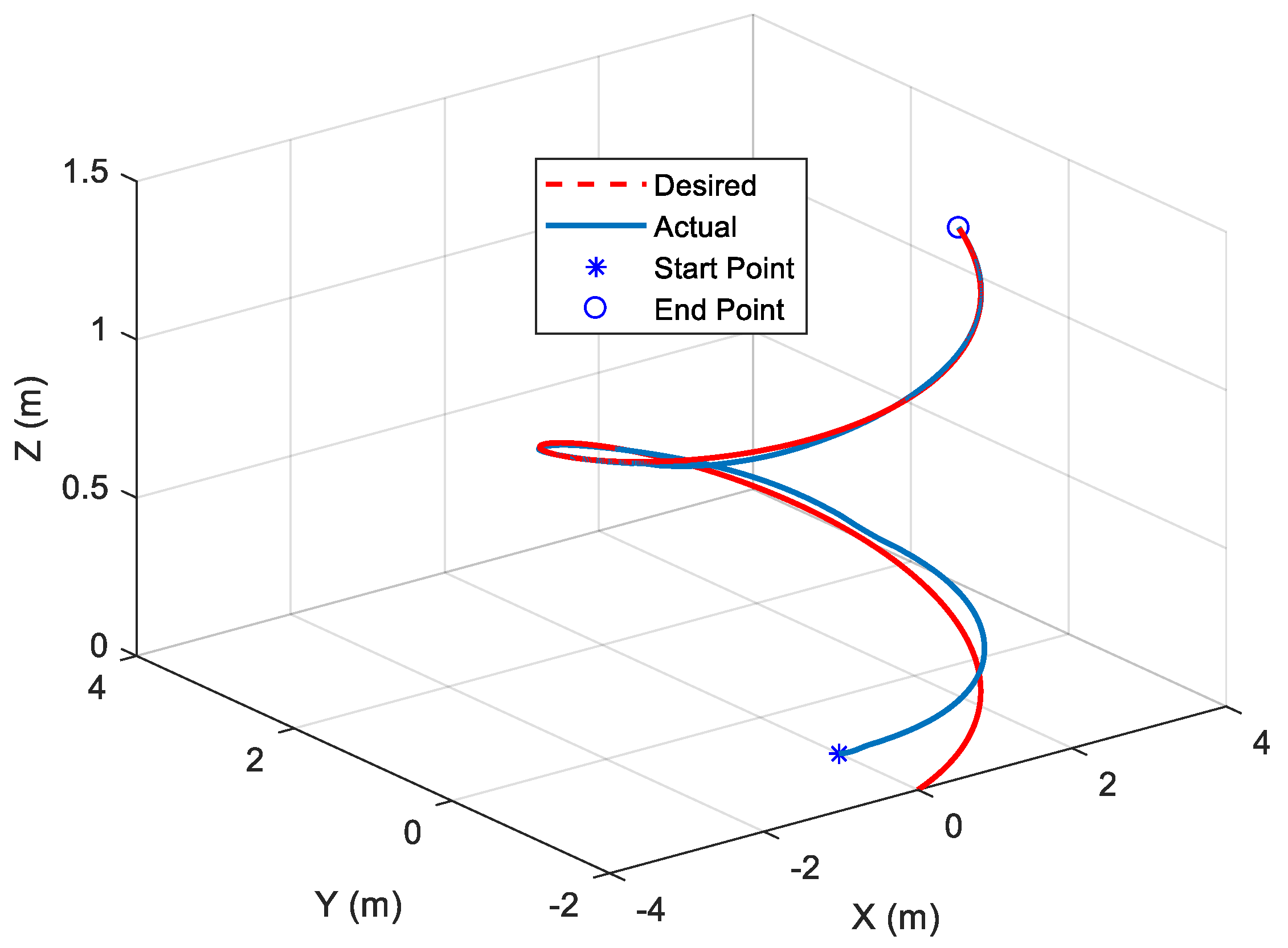
4. Simulations and Discussion
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Zhang, S. An architecture for using autonomous underwater vehicles in wireless sensor networks for underwater pipeline monitoring. IEEE Trans. Ind. Inform. 2019, 15, 1329–1340. [Google Scholar] [CrossRef]
- Makavita, C.D.; Jayasingle, S.G.; Nguyen, H.D.; Ranmuthugala, D. Experimental study of command governor adaptive control for unmanned underwater vehicles. IEEE Trans. Control Syst. Technol. 2017, 27, 332–345. [Google Scholar] [CrossRef]
- Ma, Z.; Hu, J.; Feng, J.; Liu, A. Diving adaptive position tracking control for underwater vehicles. IEEE Access 2019, 7, 24602–24610. [Google Scholar] [CrossRef]
- Lakhekar, G.V.; Waghmare, L.M.; Roy, R.G. Disturbance observer-based fuzzy adaptive S-surface controller for spatial trajectory tracking of autonomous underwater vehicle. IEEE Trans. Intell. Veh. 2019, 4, 622–635. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, M.; Rogers, E. Trajectory tracking control for autonomous underwater vehicles based on fuzzy re-planning of a local desired trajectory. IEEE Trans. Veh. Technol. 2019, 68, 11657–11667. [Google Scholar] [CrossRef]
- Londhe, P.S.; Santhakumar, M.; Patre, B.M.; Waghmare, L.M. Task space control of an autonomous underwater vehicle manipulator system by robust single-input fuzzy logic control scheme. IEEE J. Ocean. Eng. 2017, 42, 3–28. [Google Scholar] [CrossRef]
- Shen, X.; Shi, Y.; Buckham, B. Trajectory tracking control of an autonomous underwater vehicle using Lyapunov-based model predictive control. IEEE Trans. Ind. Electron. 2018, 65, 5796–5805. [Google Scholar] [CrossRef]
- Li, H.; Yan, W. Model predictive stabilization of constrained underactuated autonomous underwater vehicles with guaranteed feasibility and stability. IEEE/ASME Trans. Mechatron. 2016, 22, 1185–1194. [Google Scholar] [CrossRef]
- Sun, B.; Zhu, D.; Yang, S.X. A bioinspired filtered backstepping tracking control of 7000-m manned submarine vehicle. IEEE Trans. Ind. Electron. 2013, 61, 3682–3693. [Google Scholar] [CrossRef]
- Wang, J.; Wang, C.; Wei, Y.; Zhang, C. Three-dimensional path following of an underactuated AUV based on neuro-adaptive command filtered backstepping control. IEEE Access 2018, 6, 74355–74365. [Google Scholar] [CrossRef]
- Karkoub, M.; Wu, H.M.; Hwang, C.L. Nonlinear trajectory-tracking control of an autonomous underwater vehicle. Ocean. Eng. 2017, 145, 188–198. [Google Scholar] [CrossRef]
- Caharija, W.; Pettersen, K.Y.; Bibuli, M.; Calado, P.; Zereik, E.; Braga, J.; Gravdahl, J.T.; Sorensen, A.J.; Milovanoic, M.; Bruzzone, G. Integral line-of sight guidance and control of underactuated marine vehicles: Theory, simulations, and experiments. IEEE Trans. Control. Syst. Technol. 2016, 24, 1623–1642. [Google Scholar] [CrossRef] [Green Version]
- Peng, Z.; Wang, J.; Han, Q.L. Path-following control of autonomous underwater vehicles subject to velocity and input constraints via neurodynamic optimization. IEEE Trans. Ind. Electron. 2018, 66, 8724–8732. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Adaptive second-order fast nonsingular terminal sliding mode tracking control for fully actuated autonomous underwater vehicles. IEEE J. Ocean. Eng. 2019, 44, 363–385. [Google Scholar] [CrossRef]
- Shi, W.; Song, S.; Wu, C.; Philip Chen, C.L. Multi pseudo Q-Learning-based deterministic policy gradient for tracking control of autonomous underwater vehicles. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3534–3546. [Google Scholar] [CrossRef] [Green Version]
- Guerrero, J.; Torres, J.; Creuze, V.; Chemori, A. Observation-based nonlinear proportional–derivative control for robust trajectory tracking for autonomous underwater vehicles. IEEE J. Ocean. Eng. 2019, 45, 1190–1202. [Google Scholar] [CrossRef] [Green Version]
- Chwa, D. Adaptive neural output feedback tracking control of underactuated ships against uncertainties in kinematics and system matrices. IEEE J. Ocean. Eng. 2021, 46, 720–732. [Google Scholar] [CrossRef]
- Chen, Y.; Li, Z.; Kong, H.; Ke, F. Model predictive tracking control of nonholonomic mobile robots with coupled input constraints and unknown dynamics. IEEE Trans. Ind. Inform. 2018, 15, 3196–3205. [Google Scholar] [CrossRef]
- Hwang, C.L.; Chen, B.S. Adaptive finite-time saturated tracking control for a class of partially known robots. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 5674–5685. [Google Scholar] [CrossRef]
- Gao, Z.; Guo, G. Command filtered finite/fixed-time heading tracking control of surface vehicles. IEEE/CAA J. Autom. Sin. 2021, 8, 1667–1676. [Google Scholar] [CrossRef]
- Zhao, Z.; Liu, Z. Finite-time convergence disturbance rejection control for a flexible Timoshenko manipulator. IEEE/CAA J. Autom. Sin. 2021, 8, 157–167. [Google Scholar] [CrossRef]
- Wu, H.M.; Karkoub, M. Hierarchical Inversion-Based Output Tracking Control for Uncertain Autonomous Underwater Vehicles Using Extended Kalman Filter. Asian J. Control. 2021, 23, 228–240. [Google Scholar] [CrossRef]
- Dai, G.B.; Liu, Y.C. Distributed coordination and cooperative control for networked mobile manipulators. IEEE Trans. Ind. Electron. 2016, 64, 5065–5074. [Google Scholar] [CrossRef]
- Hwang, C.L.; Chen, Y.H. Fuzzy fixed-time learning control with saturated input, nonlinear switching surface and switching gain to achieve null tracking error. IEEE Trans. Fuzzy Syst. 2020, 28, 1464–1476. [Google Scholar] [CrossRef]
- Hwang, C.L. Comparison of path tracking control of a car-like mobile robot with and without motor dynamics. IEEE/ASME Trans. Mechatron. 2016, 21, 1801–1811. [Google Scholar] [CrossRef]
- Wu, H.M.; Karkoub, M. Hierarchical backstepping control for trajectory-tracking of autonomous underwater vehicles subject to uncertainties. In Proceedings of the 14th International Conference on Control, Automation and Systems (ICCAS 2014), Gyeonggi-do, Korea, 22–25 October 2014; pp. 1191–1196. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Description | Value | |
|---|---|---|---|
| Parameter | |||
| Mass of the AUV | |||
| Buoyancy force of the AUV | |||
| -axis of the AUV | |||
| Position coordinate of the center of gravity | |||
| Position coordinate of the buoyancy center | |||
| -axis of the total moment acting on the AUV (yawing moment) | |||
| -axis (yawing) | |||
| Added mass matrix | |||
| Linear drag matrix | |||
| Quadratic drag matrix | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, H.-M. Tracking Design of an Uncertain Autonomous Underwater Vehicle with Input Saturations by Adaptive Regression Matrix-Based Fixed-Time Control. Sensors 2022, 22, 3385. https://doi.org/10.3390/s22093385
Wu H-M. Tracking Design of an Uncertain Autonomous Underwater Vehicle with Input Saturations by Adaptive Regression Matrix-Based Fixed-Time Control. Sensors. 2022; 22(9):3385. https://doi.org/10.3390/s22093385
Chicago/Turabian StyleWu, Hsiu-Ming. 2022. "Tracking Design of an Uncertain Autonomous Underwater Vehicle with Input Saturations by Adaptive Regression Matrix-Based Fixed-Time Control" Sensors 22, no. 9: 3385. https://doi.org/10.3390/s22093385
APA StyleWu, H.-M. (2022). Tracking Design of an Uncertain Autonomous Underwater Vehicle with Input Saturations by Adaptive Regression Matrix-Based Fixed-Time Control. Sensors, 22(9), 3385. https://doi.org/10.3390/s22093385