
Research Trends in Collaborative Drones




Abstract
1. Introduction
2. Distributed Computing with Drones
2.1. Problem Description
2.2. Approach and Methodology
2.3. Future Research
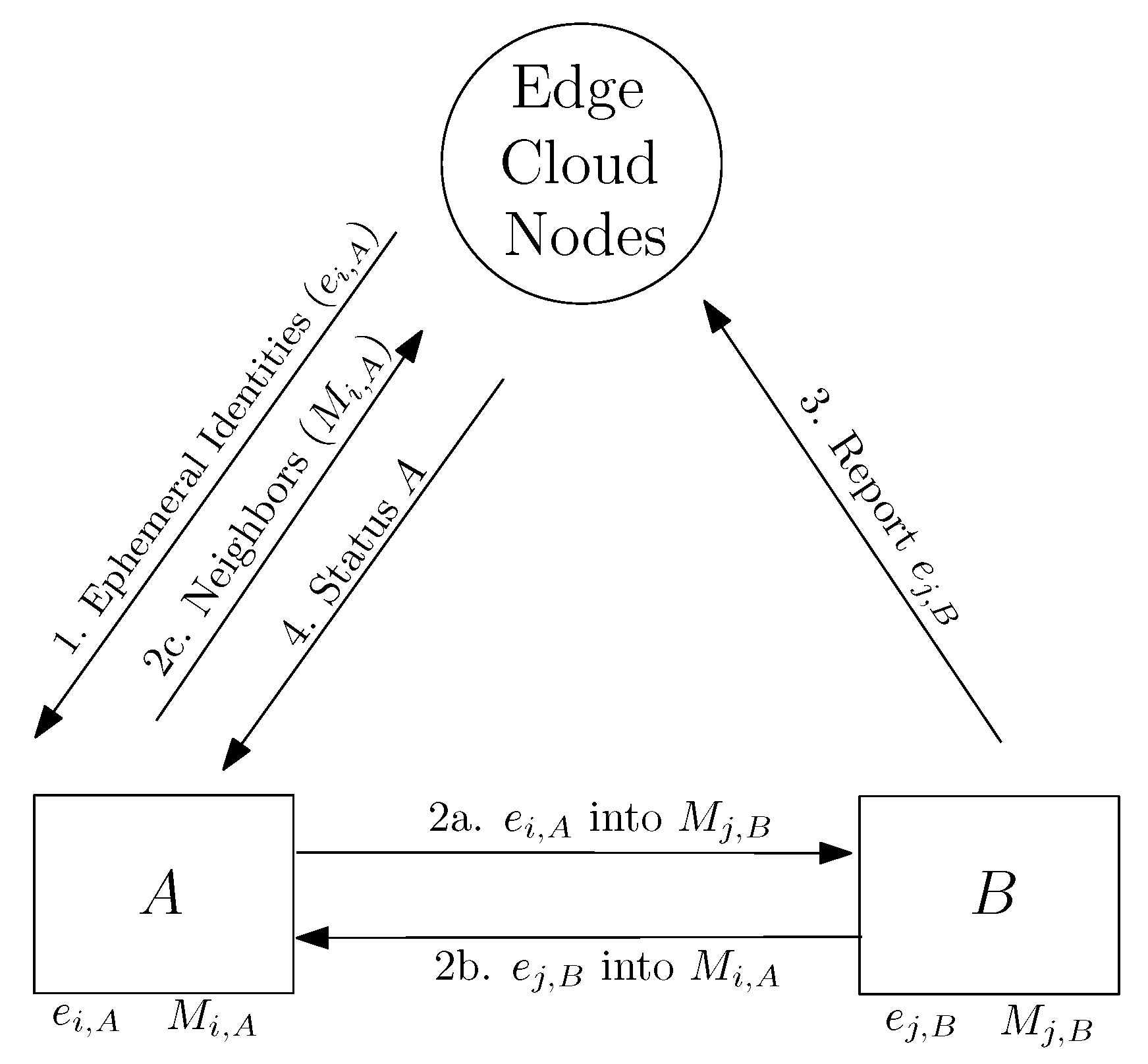
3. Countering Drone Threats
3.1. Problem Description
- Spotting and Following. When do drones enter a given airspace? Are they friends or adversaries? What tasks are drones specially fitted for? Are they armed? Loaded? What is their kind? How many rotors do they have? Are they small? Micro? Are they equipped with infrared cameras? Are drones autonomous or under the command and control of a human pilot? What are the whereabouts of spotted drones?
- Intention determination. What is the drones’ mission? Are they looking around infrastructures? Searching? Are they preparing for a strike? What is their target? Are they taking pictures? Shooting videos? What strategies or algorithms are they following to achieve their mission?
- Riposte. How to respond to the presence of adversarial drones? What are the effective countermeasures?
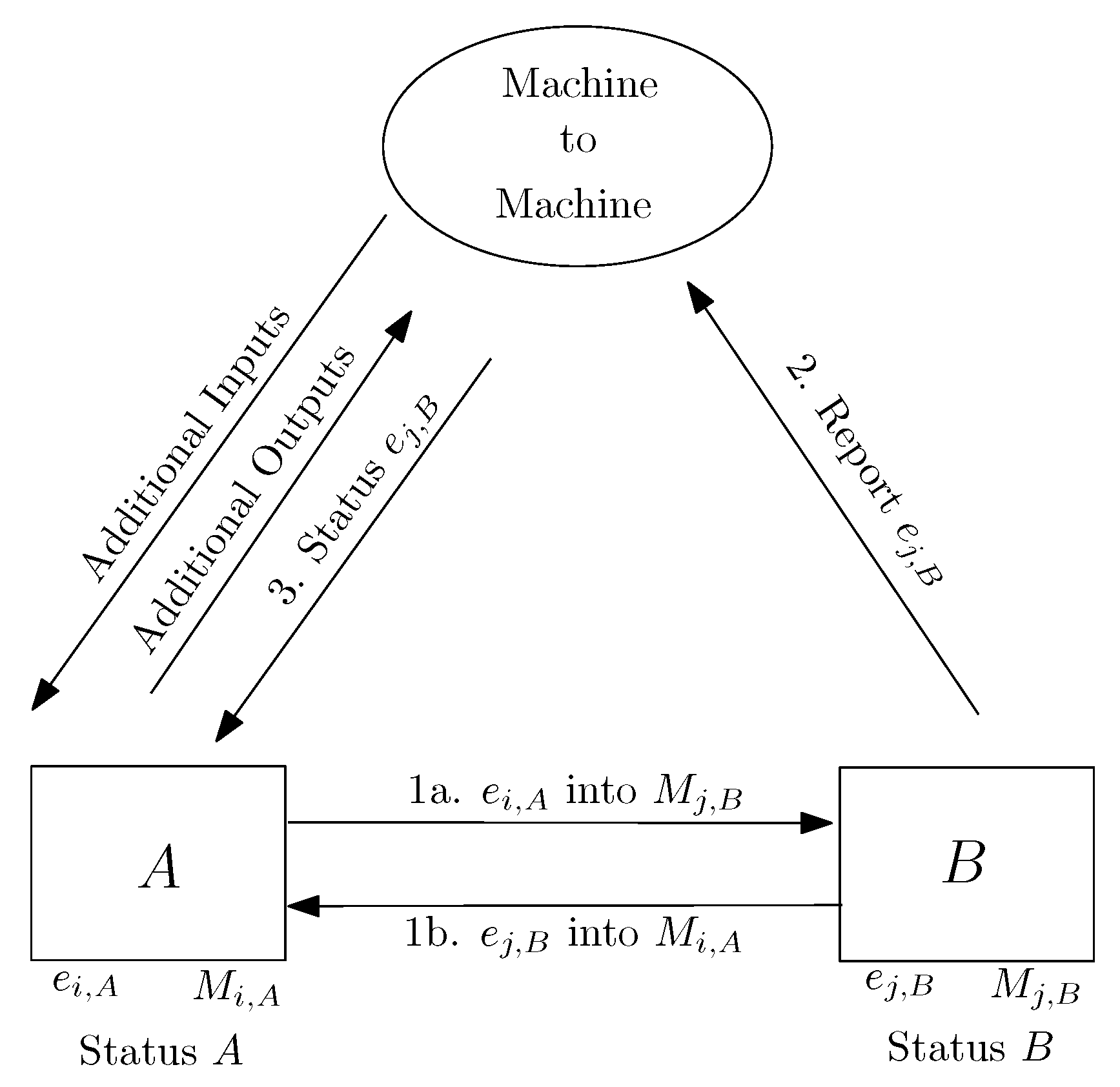
3.2. Approach and Methodology
3.3. Future Research
4. Target Recognition
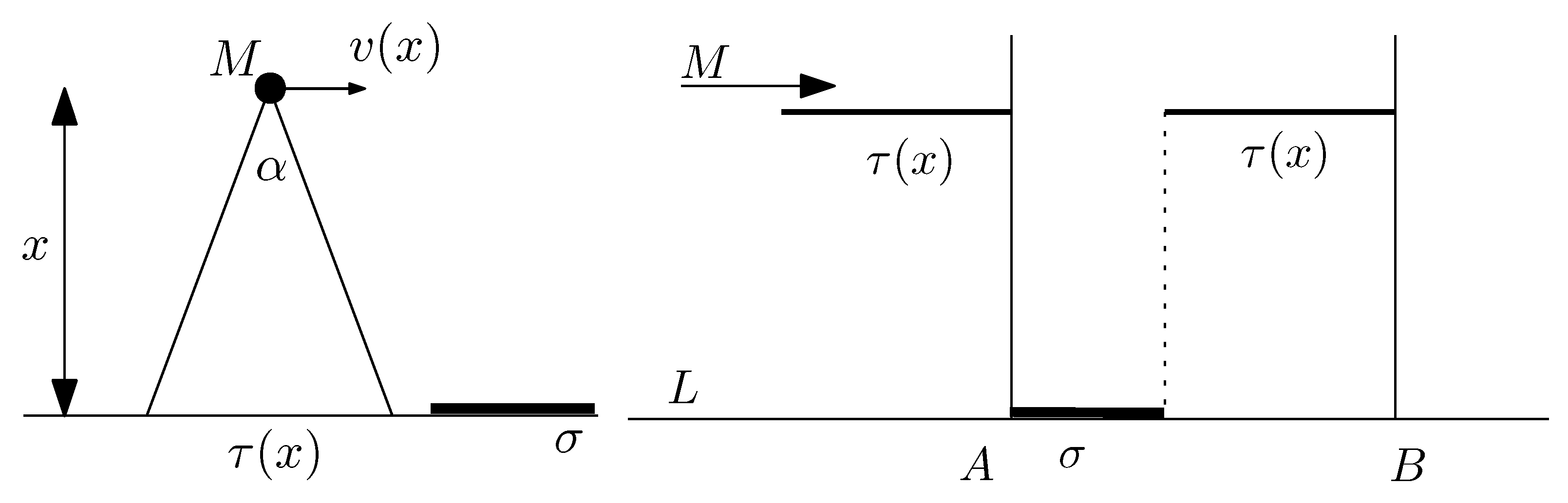
4.1. Problem Description
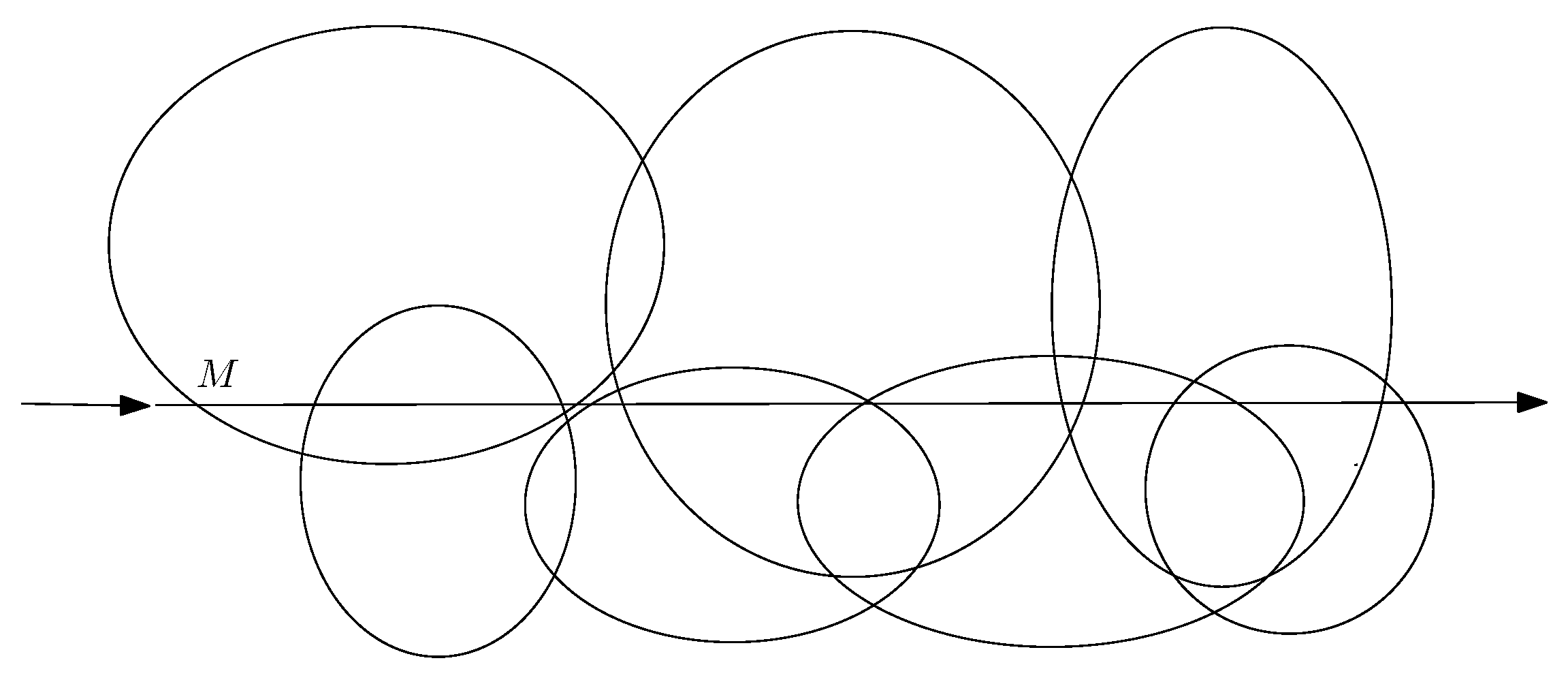
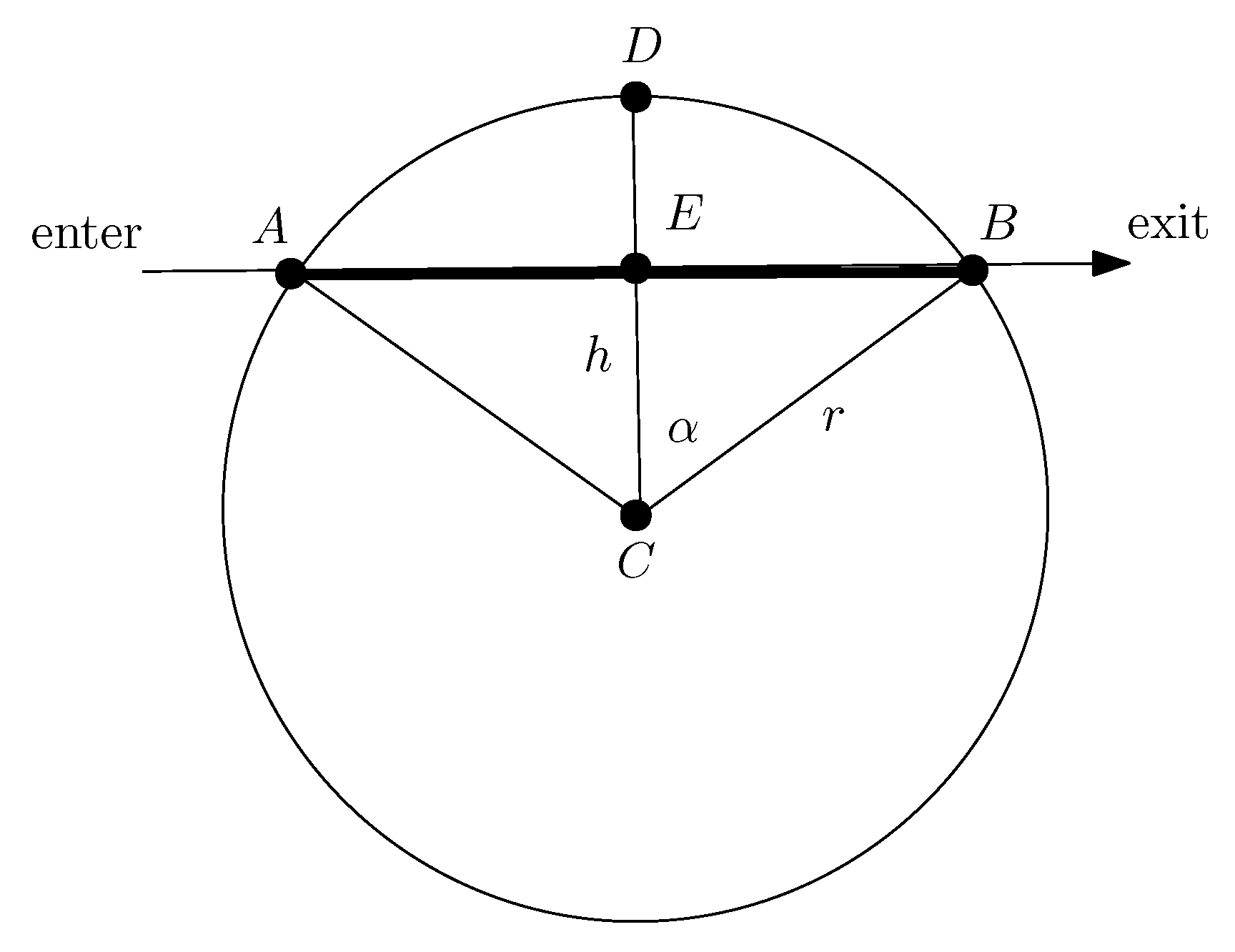
We consider only altitude-based detection (see [43,44,45,46]). Considerations could also be extended to speed-based detection (e.g., speed of data sampling) or a combination of altitude and speed.How can we accurately detect a (possibly) mobile target from a distance?
4.2. Approach and Methodology
4.3. Future Research
5. Navigating under Uncertainty
5.1. Problem Description
How can drones navigate through an environment of landmarks without using GPS information?
5.2. Approach and Methodology
- Recognition errors may be due to misinterpretation of sensed data or confusion of objects. For example, a drone has found a green door which in fact is not a door but rather a window leading to an incorrectly recognized object. We assume that for some real number , the value p is the probability that a drone performs recognition erroneously and that it is correct.
- Advice errors could be about landmarks because the information they provide is either not up to date or even outright wrong. For example, upon finding a landmark, a drone is advised to traverse a certain distance within the terrain in direction north where it will find the next landmark, say a restaurant, but this information is wrong because the restaurant is no longer there. Again, we may assume that for some real number , the value q is the probability that the advice provided to a drone about a landmark is erroneously interpreted and that it is correctly interpreted.
5.3. Future Research
6. Risk and Obstacle Avoidance
6.1. Problem Description
How can a drone navigate a risky terrain so as to minimize the impact of hazardous factors?
6.2. Approach and Methodology
6.3. Future Research
7. Networked Drones Using Cellular Technologies
7.1. Problem Description
- Low latency connections for drone command-and-control.
- Interference mitigation due to altitudes of drones.
- Cooperative drone group communications.
7.2. Approach and Methodology
7.3. Future Research
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Clarke, R. Understanding the drone epidemic. Comput. Law Secur. Rev. 2014, 30, 230–246. [Google Scholar] [CrossRef]
- De Amorim, R.M.; Wigard, J.; Kovacs, I.Z.; Sorensen, T.B.; Mogensen, P.E. Enabling cellular communication for aerial vehicles: Providing reliability for future applications. IEEE Veh. Technol. Mag. 2020, 15, 129–135. [Google Scholar] [CrossRef]
- Zhang, J. Occlusion-aware uav path planning for reconnaissance and surveillance in complex environments. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 1435–1440. [Google Scholar]
- Guerrero-Sánchez, M.E.; Lozano, R.; Castillo, P.; Hernández-González, O.; García-Beltrán, C.; Valencia-Palomo, G. Nonlinear control strategies for a UAV carrying a load with swing attenuation. Appl. Math. Model. 2021, 91, 709–722. [Google Scholar] [CrossRef]
- Shahmoradi, J.; Talebi, E.; Roghanchi, P.; Hassanalian, M. A comprehensive review of applications of drone technology in the mining industry. Drones 2020, 4, 34. [Google Scholar] [CrossRef]
- Burgués, J.; Marco, S. Environmental chemical sensing using small drones: A review. Sci. Total Environ. 2020, 748, 141172. [Google Scholar] [CrossRef]
- Chmaj, G.; Selvaraj, H. Distributed processing applications for UAV/drones: A survey. In Progress in Systems Engineering; Springer: Cham, Switzerland, 2015; pp. 449–454. [Google Scholar]
- Popescu, D.; Stoican, F.; Stamatescu, G.; Chenaru, O.; Ichim, L. A survey of collaborative UAV–WSN systems for efficient monitoring. Sensors 2019, 19, 4690. [Google Scholar] [CrossRef]
- Li, X.; Savkin, A.V. Networked Unmanned Aerial Vehicles for Surveillance and Monitoring: A Survey. Future Internet 2021, 13, 174. [Google Scholar] [CrossRef]
- Di Pietro, R.; Raponi, S.; Caprolu, M.; Cresci, S. New Dimensions of Information Warfare; Advances in Information Security; Springer International Publishing: Cham, Switzerland, 2020. [Google Scholar]
- SeedScientific. Electrifying Drone Statistic; Technical Report. 2021. Available online: https://seedscientific.com/drone-statistics/ (accessed on 19 January 2022).
- Ivancic, W.D.; Kerczewski, R.J.; Murawski, R.W.; Matheou, K.; Downey, A.N. Flying drones beyond visual line of sight using 4G LTE: Issues and concerns. In Proceedings of the 2019 Integrated Communications, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 9–11 April 2019; pp. 1–13. [Google Scholar]
- Tian, Y.; Yuan, J.; Song, H. Efficient privacy-preserving authentication framework for edge-assisted Internet of Drones. J. Inf. Secur. Appl. 2019, 48, 102354. [Google Scholar] [CrossRef]
- Calandriello, G.; Papadimitratos, P.; Hubaux, J.P.; Lioy, A. Efficient and robust pseudonymous authentication in VANET. In Proceedings of the Fourth ACM International Workshop on Vehicular Ad Hoc Networks, Montreal, QC, Canada, 10 September 2007; pp. 19–28. [Google Scholar]
- Boualouache, A.; Moussaoui, S. S2si: A practical pseudonym changing strategy for location privacy in vanets. In Proceedings of the 2014 International Conference on Advanced Networking Distributed Systems and Applications, Bejaia, Algeria, 17–19 June 2014; pp. 70–75. [Google Scholar]
- Boualouache, A.; Senouci, S.M.; Moussaoui, S. PRIVANET: An efficient pseudonym changing and management framework for vehicular ad-hoc networks. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3209–3218. [Google Scholar] [CrossRef]
- Benarous, L.; Kadri, B.; Boudjit, S. Alloyed pseudonym change strategy for location privacy in vanets. In Proceedings of the 2020 IEEE 17th Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 10–13 January 2020; pp. 1–6. [Google Scholar]
- Li, X.; Zhang, H.; Ren, Y.; Ma, S.; Luo, B.; Weng, J.; Ma, J.; Huang, X. PAPU: Pseudonym Swap With Provable Unlinkability Based on Differential Privacy in VANETs. IEEE Internet Things J. 2020, 7, 11789–11802. [Google Scholar] [CrossRef]
- Asari, A.; Alagheband, M.R.; Bayat, M.; Asaar, M.R. A new provable hierarchical anonymous certificateless authentication protocol with aggregate verification in ADS-B systems. Comput. Netw. 2021, 185, 107599. [Google Scholar] [CrossRef]
- Goudossis, A.; Katsikas, S.K. Towards a secure automatic identification system (AIS). J. Mar. Sci. Technol. 2019, 24, 410–423. [Google Scholar] [CrossRef]
- Zamani, M.; Saia, J.; Movahedi, M.; Khoury, J. Towards provably-secure scalable anonymous broadcast. In Proceedings of the 3rd USENIX Workshop on Free and Open Communications on the Internet (FOCI 13), Washington, DC, USA, 13 August 2013. [Google Scholar]
- Niu, G.; Han, T.; Yang, B.S.; Tan, A.C.C. Multi-agent decision fusion for motor fault diagnosis. Mech. Syst. Signal Process. 2007, 21, 1285–1299. [Google Scholar] [CrossRef]
- Jennings, N. Cooperation in Industrial Multi-Agent Systems; World Scientific: Singapore, 1994; Volume 43. [Google Scholar]
- Raghavan, S. Saudis say oil pipeline was attacked by drones, possibly from Yemen. The Washington Post, 15 May 2019. [Google Scholar]
- Zitser, J. A rogue killer drone ’hunted down’ a human target without being instructed to, UN report says. Bus. Insid. 2021. Available online: https://www.businessinsider.com/killer-drone-hunted-down-human-target-without-being-told-un-2021-5 (accessed on 19 January 2022).
- Shi, X.; Yang, C.; Xie, W.; Liang, C.; Shi, Z.; Chen, J. Anti-drone system with multiple surveillance technologies: Architecture, implementation, and challenges. IEEE Commun. Mag. 2018, 56, 68–74. [Google Scholar] [CrossRef]
- Shi, L.; Ahmad, I.; He, Y.; Chang, K. Hidden Markov model based drone sound recognition using MFCC technique in practical noisy environments. J. Commun. Netw. 2018, 20, 509–518. [Google Scholar] [CrossRef]
- Anwar, M.Z.; Kaleem, Z.; Jamalipour, A. Machine learning inspired sound-based amateur drone detection for public safety applications. IEEE Trans. Veh. Technol. 2019, 68, 2526–2534. [Google Scholar] [CrossRef]
- Al-Sa’d, M.F.; Al-Ali, A.; Mohamed, A.; Khattab, T.; Erbad, A. RF-based drone detection and identification using deep learning approaches: An initiative towards a large open source drone database. Future Gener. Comput. Syst. 2019, 100, 86–97. [Google Scholar] [CrossRef]
- De Wit, J.M.; Harmanny, R.; Premel-Cabic, G. Micro-Doppler analysis of small UAVs. In Proceedings of the 2012 9th European Radar Conference, Amsterdam, The Netherlands, 31 October–2 November 2012; pp. 210–213. [Google Scholar]
- Fioranelli, F.; Ritchie, M.; Griffiths, H.; Borrion, H. Classification of loaded/unloaded micro-drones using multistatic radar. Electron. Lett. 2015, 51, 1813–1815. [Google Scholar] [CrossRef]
- Traboulsi, A.; Barbeau, M. Identification of Drone Payload Using Mel-Frequency Cepstral Coefficients and LSTM Neural Networks. In Proceedings of the Future Technologies Conference; Springer: Cham, Switzerland, 2020; pp. 402–412. [Google Scholar]
- Schumann, A.; Sommer, L.; Müller, T.; Voth, S. An image processing pipeline for long range UAV detection. In Emerging Imaging and Sensing Technologies for Security and Defence III; and Unmanned Sensors, Systems, and Countermeasures; International Society for Optics and Photonics: Bellingham, WA, USA, 2018; Volume 10799, p. 107990T. [Google Scholar]
- Shamir, A.; Safran, I.; Ronen, E.; Dunkelman, O. A simple explanation for the existence of adversarial examples with small hamming distance. arXiv 2019, arXiv:1901.10861. [Google Scholar]
- Eykholt, K.; Evtimov, I.; Fernandes, E.; Li, B.; Rahmati, A.; Xiao, C.; Prakash, A.; Kohno, T.; Song, D. Robust physical-world attacks on deep learning visual classification. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 1625–1634. [Google Scholar]
- Barták, R.; Vomlelová, M. Using machine learning to identify activities of a flying drone from sensor readings. In Proceedings of the Thirtieth International Flairs Conference, Marco Island, FL, USA, 22–24 May 2017. [Google Scholar]
- Traboulsi, A.; Barbeau, M. Recognition of drone formation intentions using supervised machine learning. In Proceedings of the 2019 International Conference on Computational Science and Computational Intelligence (CSCI), Las Vegas, NV, USA, 5–7 December 2019; pp. 408–411. [Google Scholar]
- McLaren, I.A. Methods of determining the numbers and availability of ringed seals in the eastern Canadian Arctic. Arctic 1961, 14, 162–175. [Google Scholar] [CrossRef]
- Van Gemert, J.C.; Verschoor, C.R.; Mettes, P.; Epema, K.; Koh, L.P.; Wich, S. Nature conservation drones for automatic localization and counting of animals. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2014; pp. 255–270. [Google Scholar]
- Laake, J.L.; Calambokidis, J.; Osmek, S.D.; Rugh, D.J. Probability of detecting harbor porpoise from aerial surveys: Estimating g (0). J. Wildl. Manag. 1997, 61, 63–75. [Google Scholar] [CrossRef]
- Hodgson, A.; Kelly, N.; Peel, D. Unmanned aerial vehicles (UAVs) for surveying marine fauna: A dugong case study. PLoS ONE 2013, 8, e79556. [Google Scholar] [CrossRef] [PubMed]
- Chittka, L.; Dyer, A.G.; Bock, F.; Dornhaus, A. Psychophysics: Bees trade off foraging speed for accuracy. Nature 2003, 424, 388. [Google Scholar] [CrossRef] [PubMed]
- Chen, B.; Perona, P. Speed versus accuracy in visual search: Optimal performance and neural architecture. J. Vis. 2015, 15, 9. [Google Scholar] [CrossRef]
- Chen, B.; Perona, P. Speed Versus Accuracy in Visual Search: Optimal Performance and Neural Implementations. In Computational and Cognitive Neuroscience of Vision; Springer: Singapore, 2017; pp. 105–140. [Google Scholar]
- Ha, I.K.; Cho, Y.Z. A probabilistic target search algorithm based on hierarchical collaboration for improving rapidity of drones. Sensors 2018, 18, 2535. [Google Scholar] [CrossRef]
- Yonas, A.; Pittenger, J. Searching for many targets: An analysis of speed and accuracy. Percept. Psychophys. 1973, 13, 513–516. [Google Scholar] [CrossRef][Green Version]
- Kranakis, E.; Krizanc, D. Searching with Uncertainty. In Proceedings of the SIROCCO’99, 6th International Colloquium on Structural Information & Communication Complexity, Lacanau-Ocean, France, 1–3 July 1999; pp. 194–203. [Google Scholar]
- Barbeau, M.; Garcia-Alfaro, J.; Kranakis, E. Geocaching-Inspired Navigation for Micro Aerial Vehicles with Fallible Place Recognition. In Proceedings of the International Conference on Ad-Hoc Networks and Wireless, Bari, Italy, 19–21 October 2020; Springer: Cham, Switzerland, 2020; pp. 55–70. [Google Scholar]
- Barbeau, M.; Garcia-Alfaro, J.; Kranakis, E.; Santos, F. GPS-Free, Error Tolerant Path Planning for Swarms of Micro Aerial Vehicles with Quality Amplification. Sensors 2021, 21, 4731. [Google Scholar] [CrossRef]
- Lattimore, T.; Szepesvári, C. Bandit Algorithms; Cambridge University Press: Cambridge, UK, 2020. [Google Scholar]
- Barbeau, M.; Garcia-Alfaro, J.; Kranakis, E. Risky Zone Avoidance Strategies for Drones. In Proceedings of the 2021 IEEE Canadian Conference on Electrical and Computer Engineering (CCECE), Virtually, 12–17 September 2021; pp. 1–6. [Google Scholar]
- Olfati-Saber, R.; Murray, R.M. Distributed cooperative control of multiple vehicle formations using structural potential functions. IFAC Proc. Vol. 2002, 35, 495–500. [Google Scholar] [CrossRef]
- Vásárhelyi, G.; Virágh, C.; Somorjai, G.; Nepusz, T.; Eiben, A.E.; Vicsek, T. Optimized flocking of autonomous drones in confined environments. Sci. Robot. 2018, 3, eaat3536. [Google Scholar] [CrossRef]
- The 3rd Generation Partnership Project (3GPP). 3GPP TR 36.777, Enhanced LTE Support for Aerial Vehicles. 2017. Available online: ftp://www.3gpp.org/specs/archive/36series/36.777 (accessed on 18 January 2022).
- The 3rd Generation Partnership Project (3GPP). UAS-UAV. 2019. Available online: https://www.3gpp.org/uas-uav (accessed on 18 January 2022).
- The 3rd Generation Partnership Project (3GPP). Unmanned Aerial System (UAS) Support in 3GPP, Technical Specification (TS). 2020. Available online: https://www.3gpp.org/ftp//Specs/archive/22_series/22.125 (accessed on 18 January 2022).
- Ullah, H.; Nair, N.G.; Moore, A.; Nugent, C.; Muschamp, P.; Cuevas, M. 5G communication: An overview of vehicle-to-everything, drones, and healthcare use-cases. IEEE Access 2019, 7, 37251–37268. [Google Scholar] [CrossRef]
- Mozaffari, M.; Kasgari, A.T.Z.; Saad, W.; Bennis, M.; Debbah, M. 3D cellular network architecture with drones for beyond 5G. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar]
- Bennis, M.; Debbah, M.; Poor, H.V. Ultrareliable and low-latency wireless communication: Tail, risk, and scale. Proc. IEEE 2018, 106, 1834–1853. [Google Scholar] [CrossRef]
- Kishk, M.; Bader, A.; Alouini, M.S. Aerial base station deployment in 6G cellular networks using tethered drones: The mobility and endurance tradeoff. IEEE Veh. Technol. Mag. 2020, 15, 103–111. [Google Scholar] [CrossRef]
- Kishk, M.A.; Bader, A.; Alouini, M.S. On the 3-D placement of airborne base stations using tethered UAVs. IEEE Trans. Commun. 2020, 68, 5202–5215. [Google Scholar] [CrossRef]
- Pourbaba, P.; Ali, S.; Manosha, K.S.; Rajatheva, N. Multi-Armed Bandit Learning for Full-Duplex UAV Relay Positioning for Vehicular Communications. In Proceedings of the 2019 16th International Symposium on Wireless Communication Systems (ISWCS), Oulu, Finland, 27–30 August 2019; pp. 188–192. [Google Scholar]
- Fotouhi, A.; Ding, M.; Hassan, M. DroneCells: Improving spectral efficiency using drone-mounted flying base stations. J. Netw. Comput. Appl. 2021, 174, 102895. [Google Scholar] [CrossRef]
- Fotouhi, A.; Ding, M.; Hassan, M. Flying Drone Base Stations for Macro Hotspots. IEEE Access 2018, 6, 19530–19539. [Google Scholar] [CrossRef]
- Fotouhi, A.; Ding, M.; Hassan, M. Dynamic base station repositioning to improve spectral efficiency of drone small cells. In Proceedings of the 2017 IEEE 18th International Symposium on A World of Wireless, Mobile and Multimedia Networks (WoWMoM), Macau, China, 12–15 June 2017; pp. 1–9. [Google Scholar]
- Lin, X.; Wiren, R.; Euler, S.; Sadam, A.; Määttänen, H.L.; Muruganathan, S.; Gao, S.; Wang, Y.P.E.; Kauppi, J.; Zou, Z.; et al. Mobile network-connected drones: Field trials, simulations, and design insights. IEEE Veh. Technol. Mag. 2019, 14, 115–125. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Passive | Active | |
|---|---|---|
| Spotting and following | Audio, video and RF | Autonomy rev. Turing test |
| observations and ML | ||
| RF signal DB | ||
| Micro-Doppler signatures | ||
| Intention determination | Maneuvers recognition w. RL | |
| Formation prediction w. SL | ||
| Riposte | RF jamming | |
| Counterattack drones |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barbeau, M.; Garcia-Alfaro, J.; Kranakis, E. Research Trends in Collaborative Drones. Sensors 2022, 22, 3321. https://doi.org/10.3390/s22093321
Barbeau M, Garcia-Alfaro J, Kranakis E. Research Trends in Collaborative Drones. Sensors. 2022; 22(9):3321. https://doi.org/10.3390/s22093321
Chicago/Turabian StyleBarbeau, Michel, Joaquin Garcia-Alfaro, and Evangelos Kranakis. 2022. "Research Trends in Collaborative Drones" Sensors 22, no. 9: 3321. https://doi.org/10.3390/s22093321
APA StyleBarbeau, M., Garcia-Alfaro, J., & Kranakis, E. (2022). Research Trends in Collaborative Drones. Sensors, 22(9), 3321. https://doi.org/10.3390/s22093321