
Roadside Unit Deployment in Internet of Vehicles Systems: A Survey




Abstract
:1. Introduction
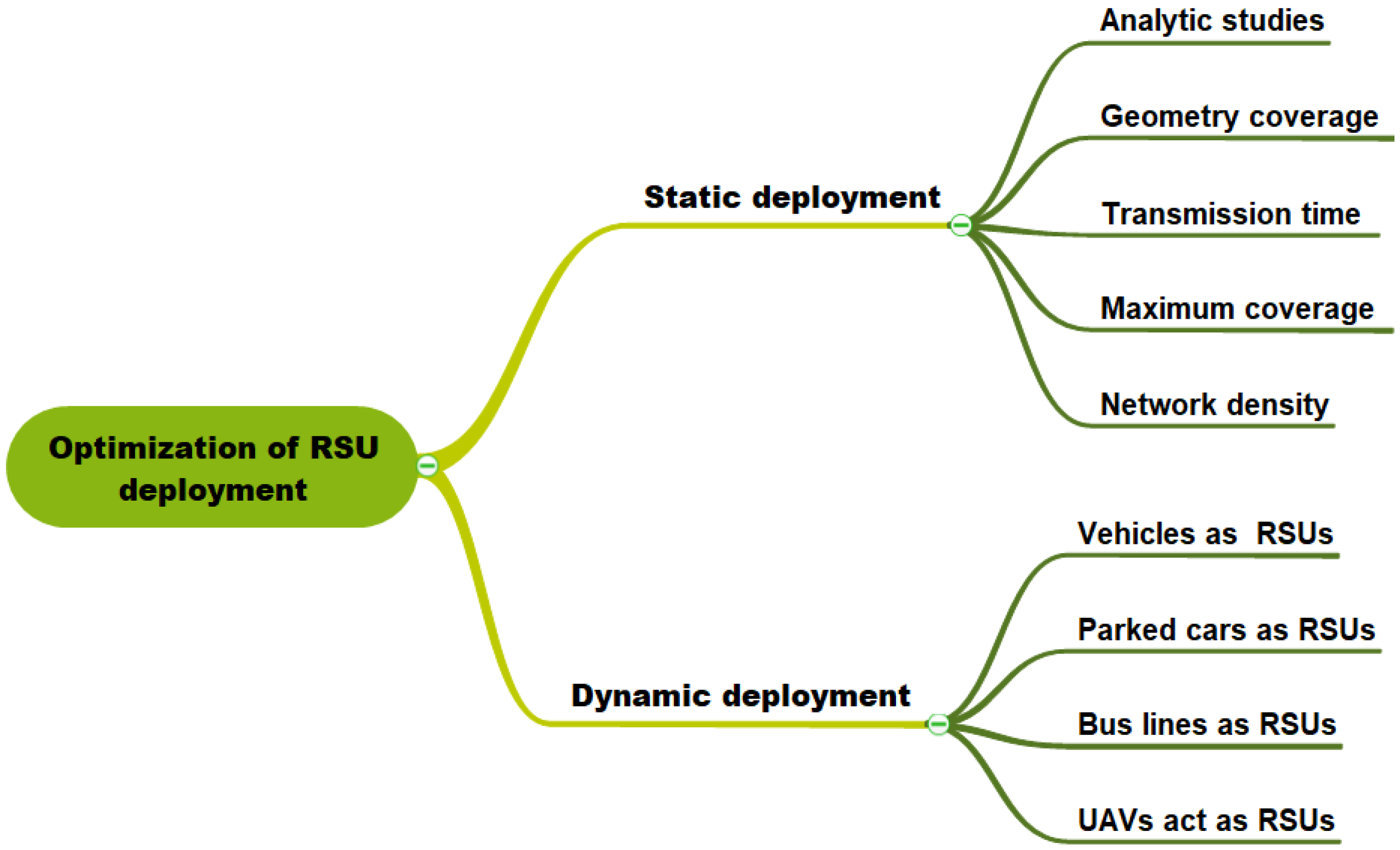
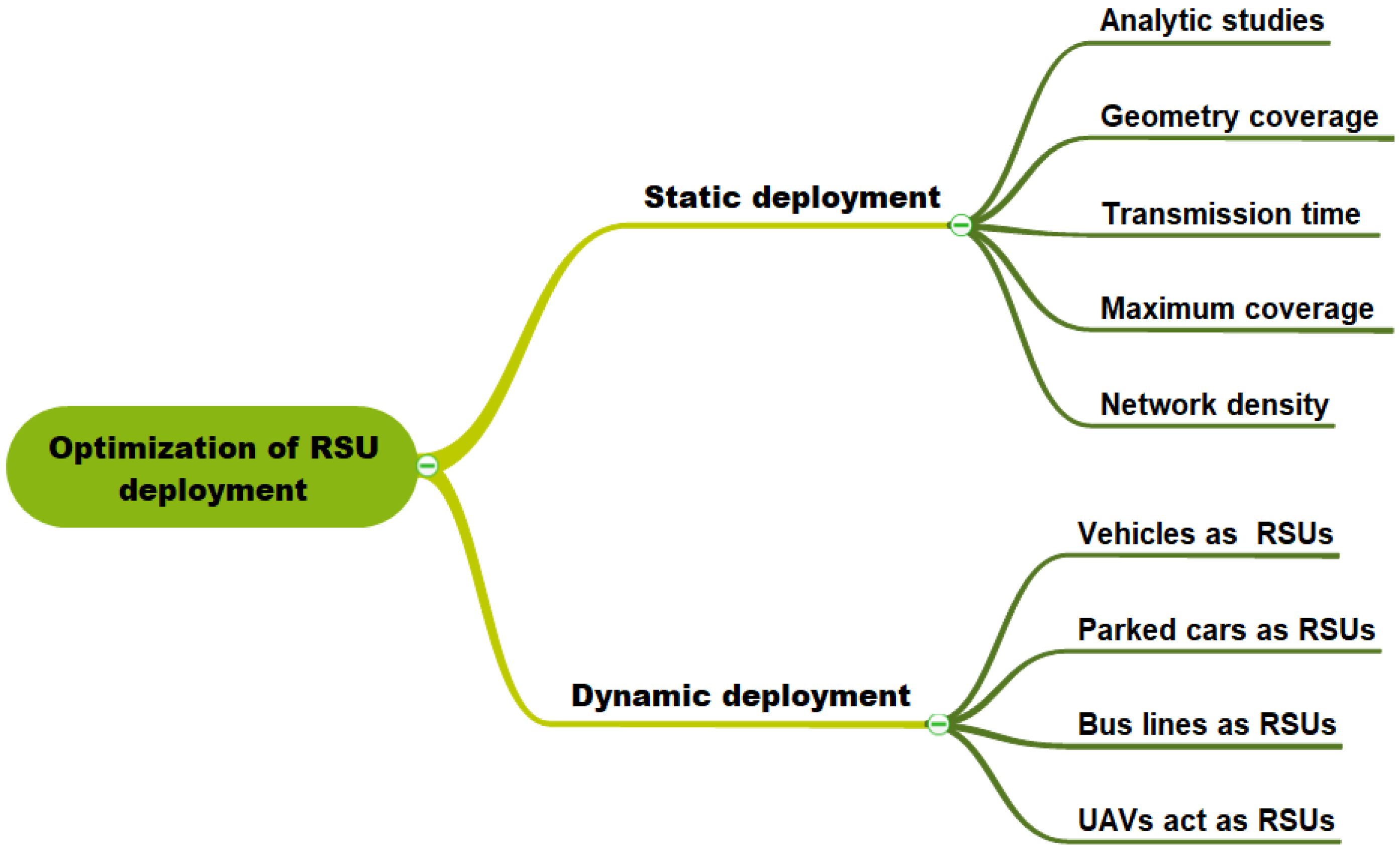
- RSU deployment based on analytic study;
- Geometry coverage model;
- Transmission time strategy;
- Maximum coverage model;
- Network density approach.
- Vehicle used as temporary RSU;
- Parked cars can be used as RSUs;
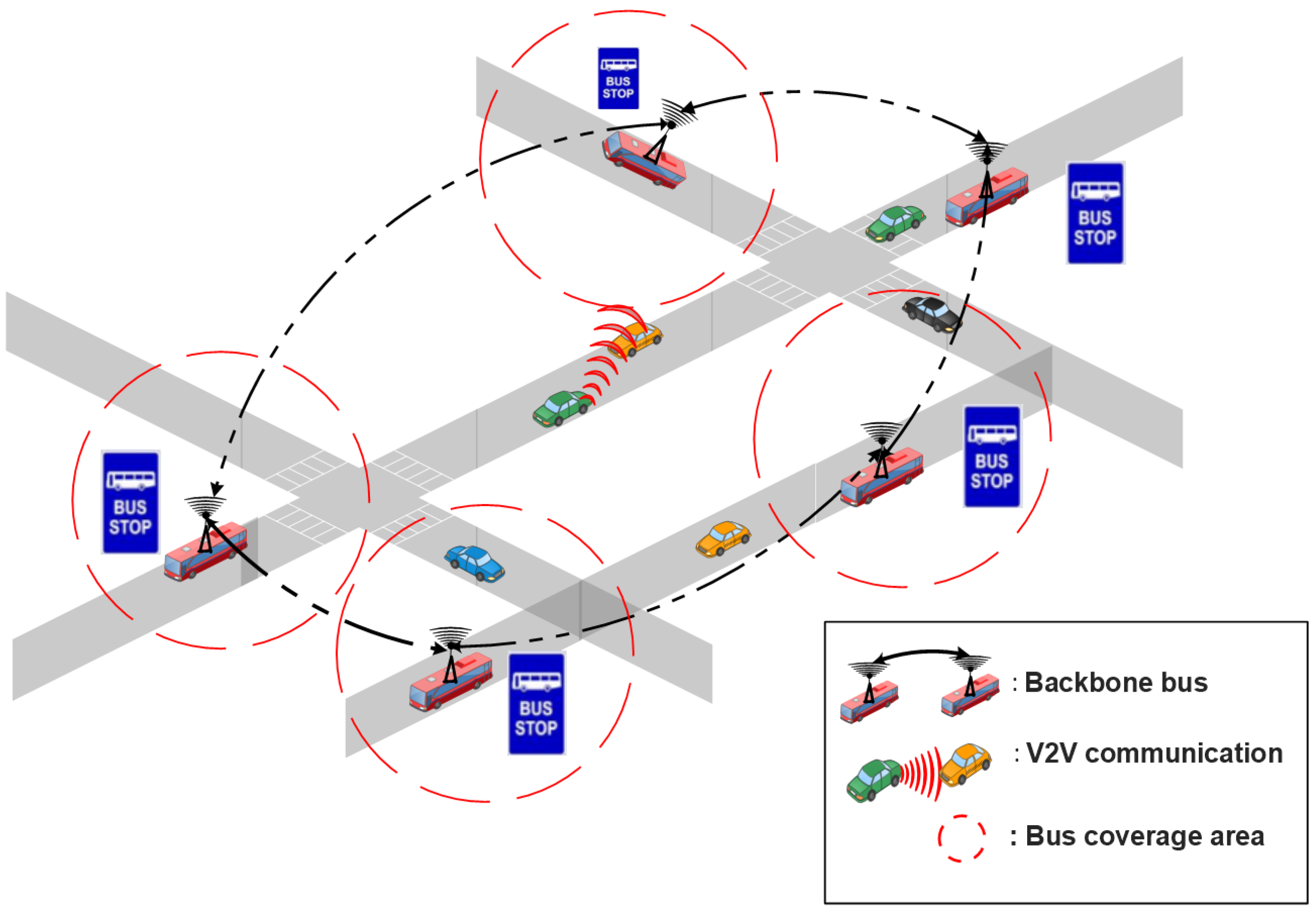
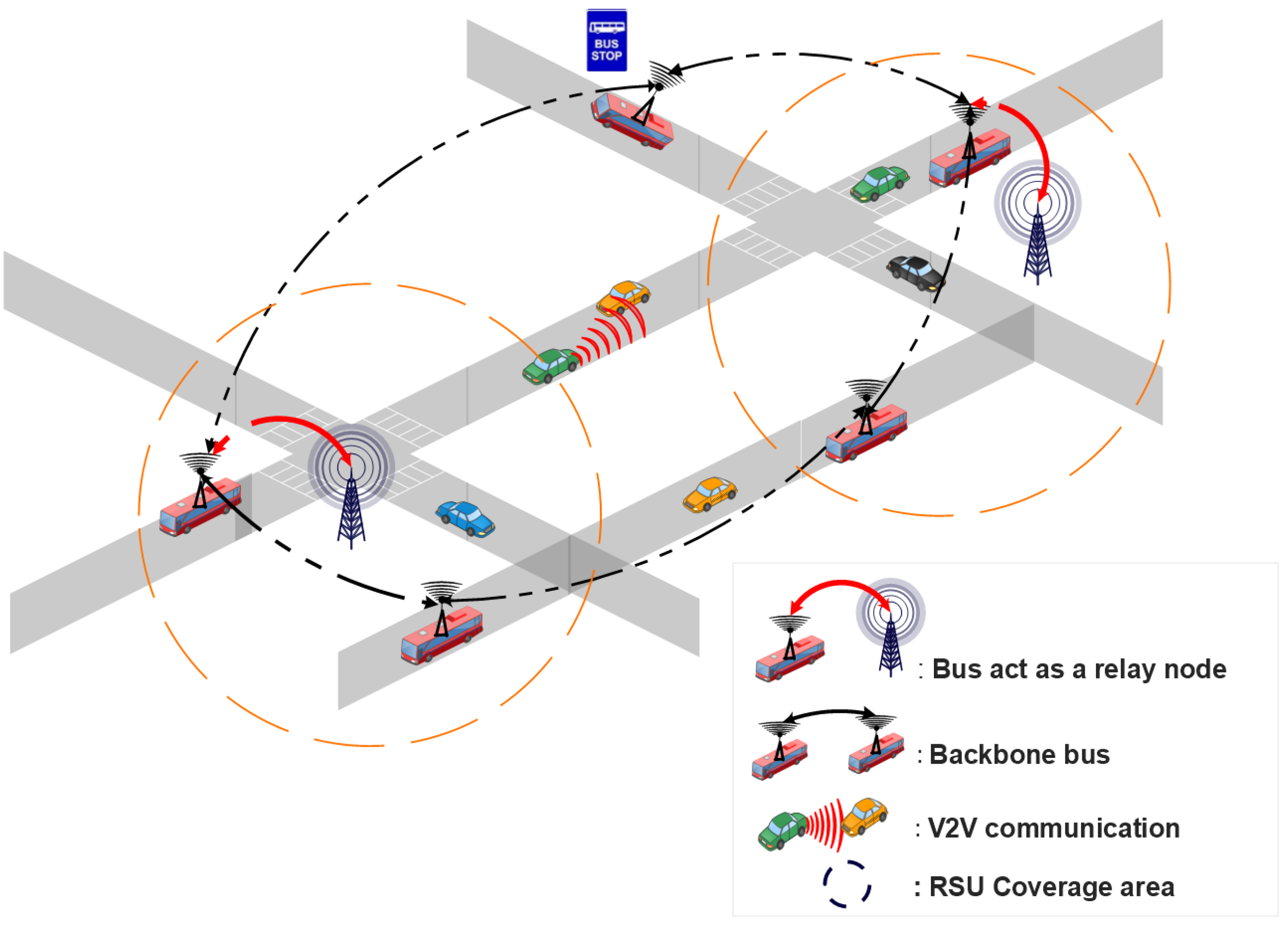
- Similarly to buses of regular lines being used as RSUs;
- Unmanned aerial vehicles (UAV) act as RSUs.
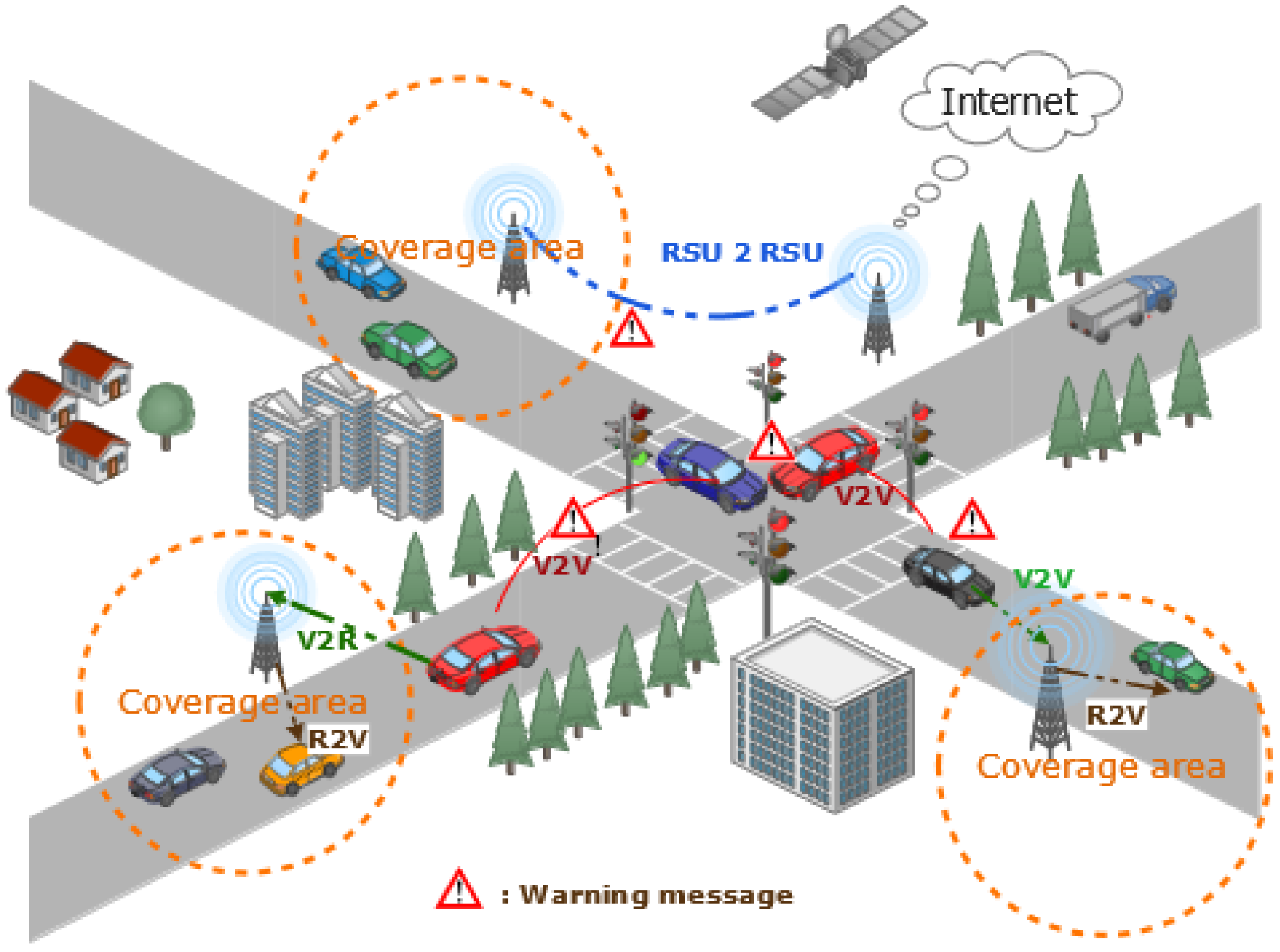
2. Vehicular Networking: Definition and Deployment
3. Deployment of Roadside Units in VANET: An Overview
3.1. Problem Statement
3.2. Tackled Objectives in RSU Deployment
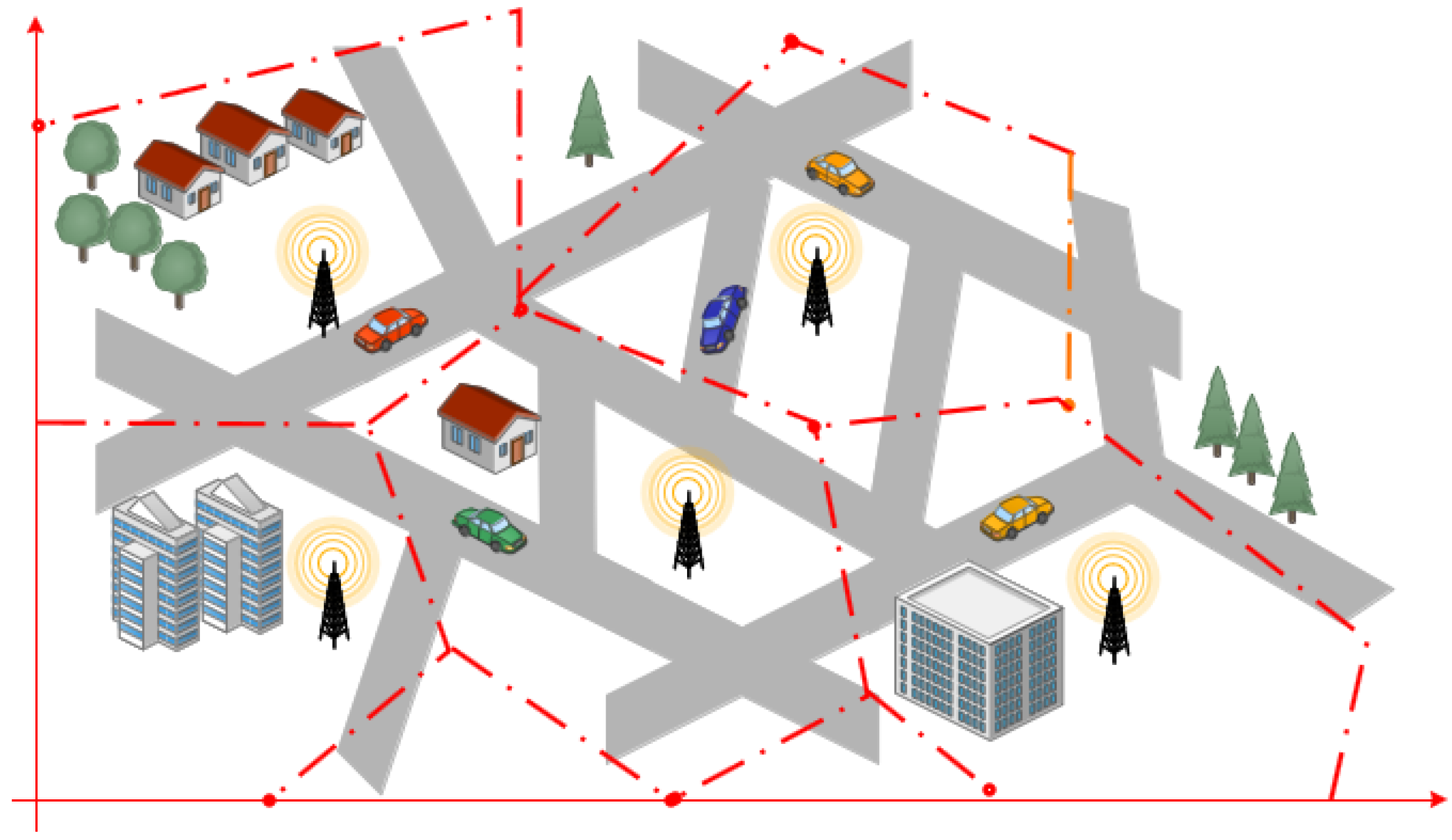
- Maximizing the transmission coverage area: An area is considered as covered by a RSU if it remains within its transmission range. Due to the RSU’s short communication range, a dense deployment of RSUs is required to achieve ubiquitous coverage throughout a city; nevertheless, service providers may be forced to charge high RSU access fees, discouraging consumers from using the service [34,35]. The RSU coverage allows for answering the question: for how long are the vehicles able to detect an RSU? Additionally, transmission coverage formulations can try to find the best location in the physical space with the goal of having at least one RSU within a transmission range.
- Network connectivity: because of its dynamic nature, a VANET frequently experiences intermittent connectivity, which increases the delay in disseminating the gathered road conditions’ information, and hence affects the quality of service (QoS) provided to users [36]. To solve this issue, the roadside units (RSUs) can be deployed as an aid for the VANET to increase network connectivity, reduce transmission delays, and improve communication ranges [37]. If the communication range of an RSU exceeds the communication range of a vehicle, the connectivity analysis remains unaffected [38].
- Cost deployment minimization: The deployment of RSUs in a road network necessitates investment and maintenance. For example, if RSUs are widely deployed around the city, coverage will be expanded, but the RSU setup cost may be too high (between $13,000 and $15,000 per unit capital cost, and up to $2400 per unit per year for operation and maintenance [39]. Hence, many large RSU deployment strategies might fail not just because of high initial setup costs, but also because of little used RSU waste energy. To address this issue, finding the optimal balance between sleep or active mode for RSUs is a primary strategy to minimize its overall energy consumption while maintaining network connectivity [40].
3.3. Problem Modelling
3.4. Performance Metrics for RSU Deployment
- Coverage ratio: This important metric is calculated by dividing the number of valid coverage sub-roads by the total number of sub-roads in the road network; it indicates the ratio of road segments coverage in the network [56]. Subtracting duplicated sub-roads from all sub-roads yields the number of legitimate coverage sub-roads.
- Overlapping coverage area: Large coverage areas that overlap with nearby RSUs waste resources and reduce the capacity to disseminate information over larger regions [57]. In addition, such RSUs may deal with some redundant duplicated traffic messages generated by vehicles within the overlapped area covered by more than one RSU. As a result, every RSU deployment strategy must consider reducing the extent of the overlapping coverage of RSUs to the bare minimum.
- Packet delay: The packet delay is a primary metric to guarantee the quality of service for VANET [58]. It is not only important to receive the packet, but to receive it within the maximum eligible delay as well. Any packet received after this time limit hinders service availability.
- Packet loss ratio: Packet loss refers to the number of packets dropped in transmissions, which is used to measure the ability of a network to relay. This measure is based on the maximum allowable delay, and any packet received after this limit is considered as lost [43]. By subtracting the number of packets successfully broadcast during the delay from all packets in the deployed region, the number of packets lost is calculated [15].
- Packet delivery rates: The packet delivery rate is derived by dividing the total number of packets received by the target RSUs by the total number of packets coming from vehicles. It measures the percentage of the transmitted data packets that are successfully received [59].
4. Taxonomy of RSU Deployment
4.1. Static Deployment
4.1.1. RSU Deployment Based on Analytic Studies
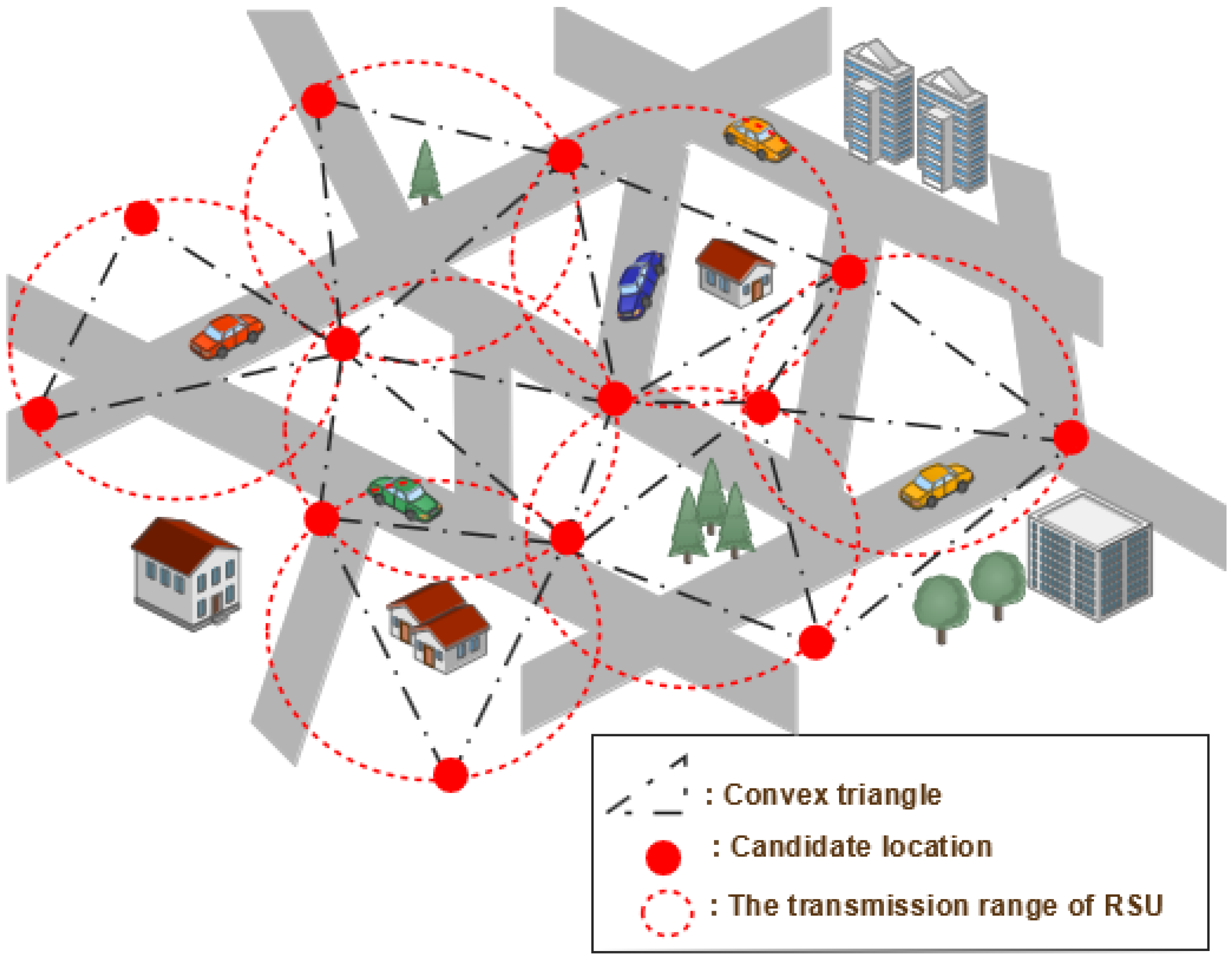
4.1.2. RSUS Deployment Based on Geometry Coverage Model
4.1.3. RSUs Deployment Based on Transmission Time
4.1.4. RSU Deployment Based on Maximum Coverage Model
4.1.5. RSU Deployment Based on Network Density
4.2. Dynamic Deployment
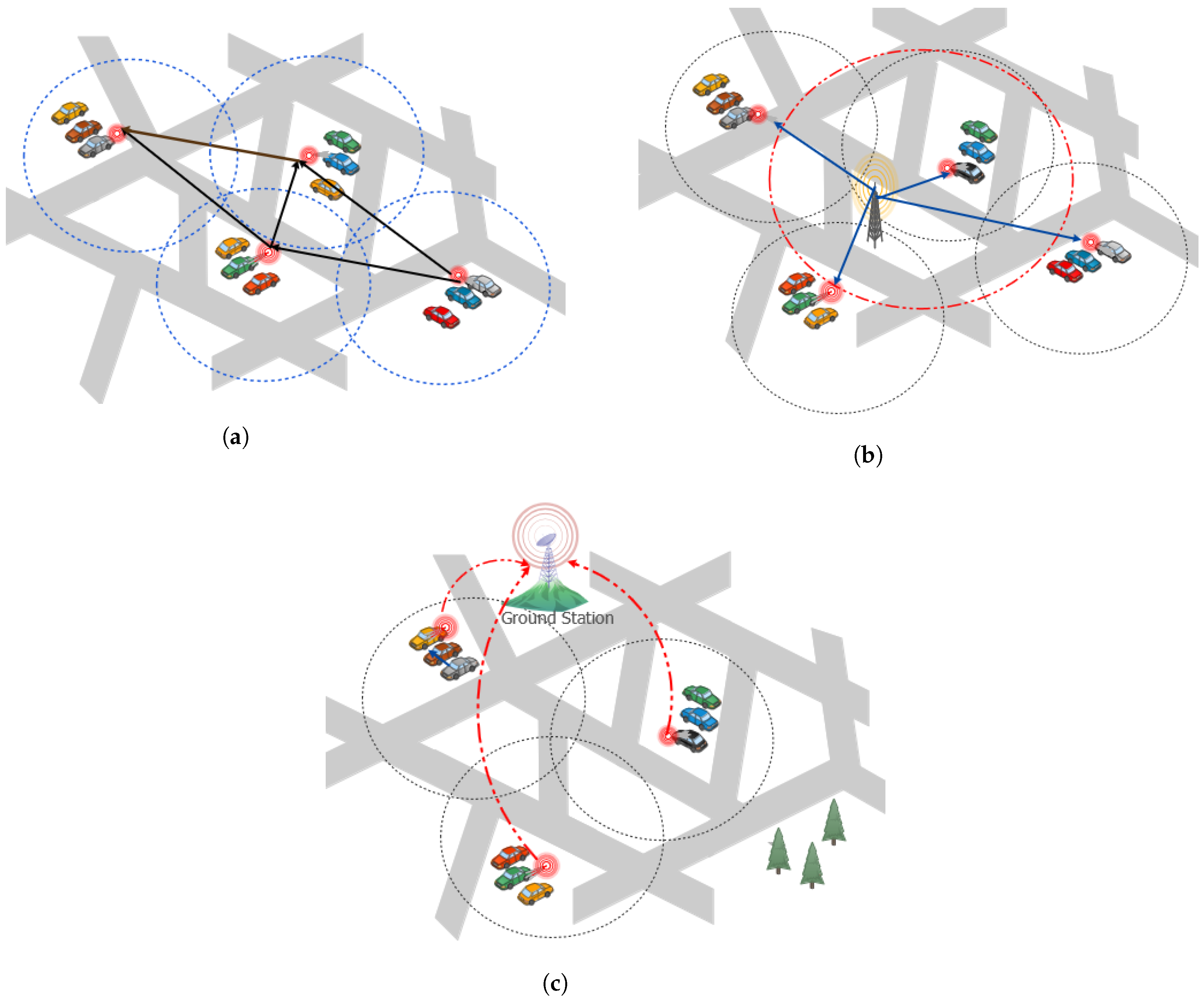
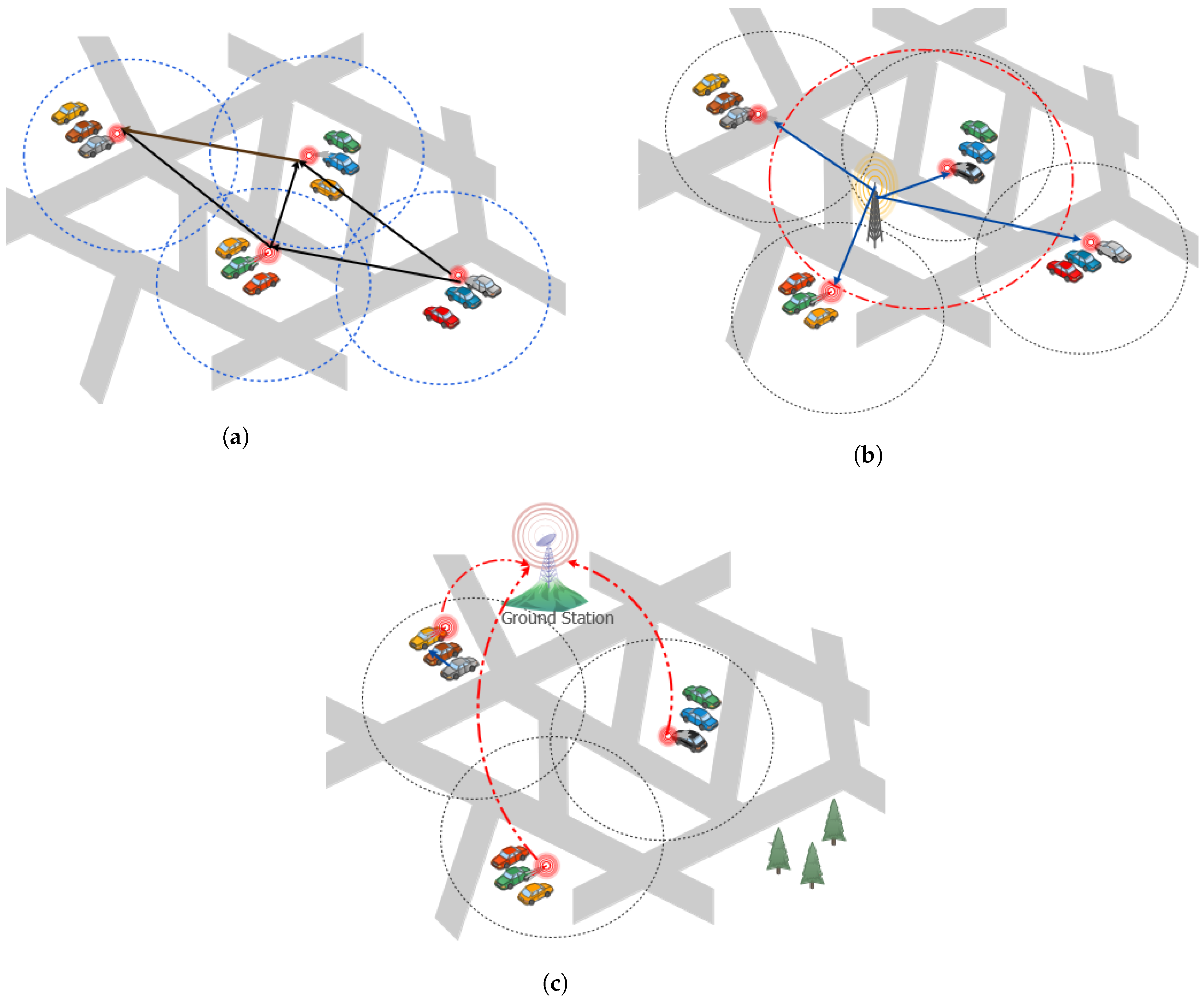
4.2.1. Vehicle Used as Temporary RSU
4.2.2. Parked Cars Used as RSUs
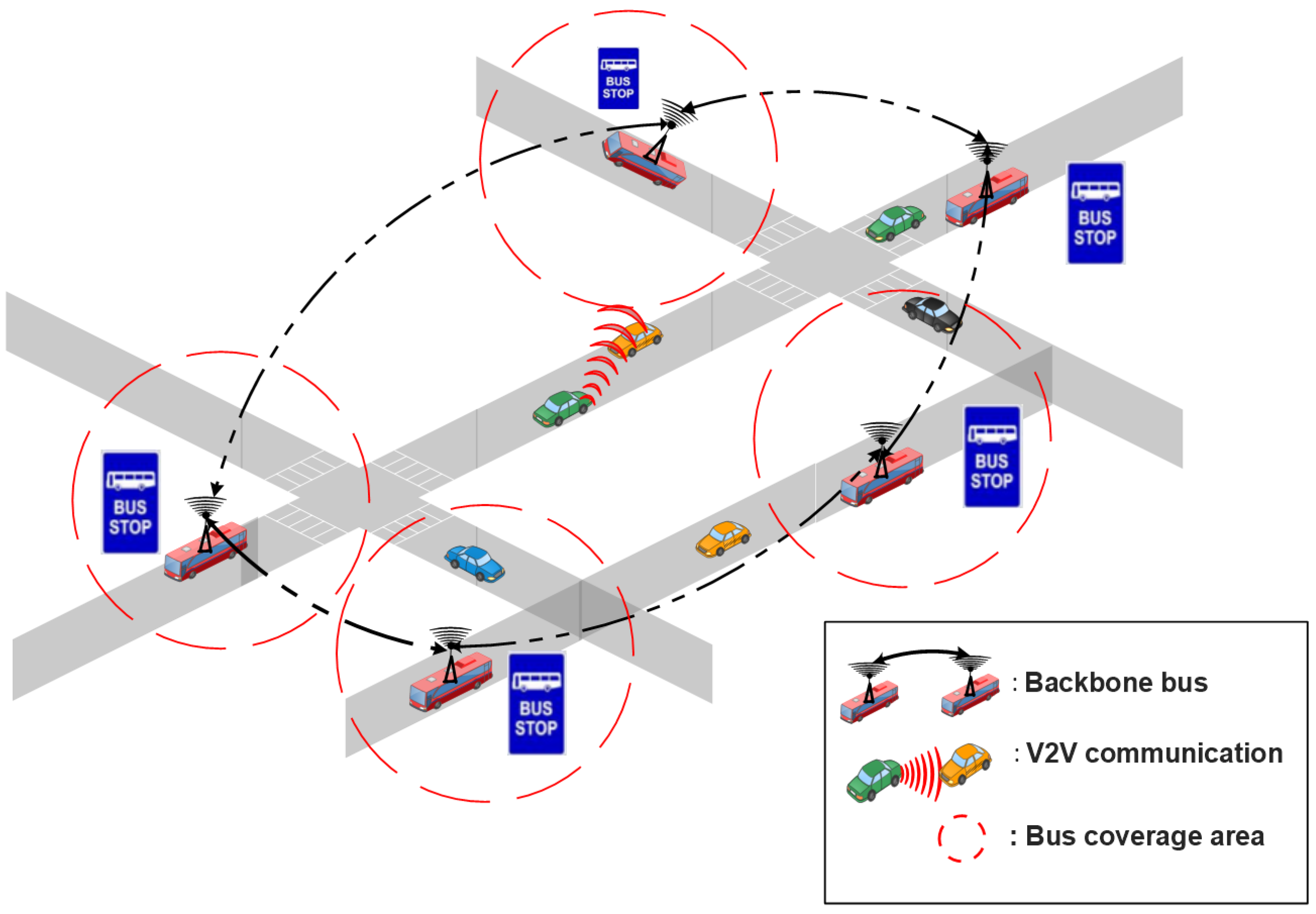
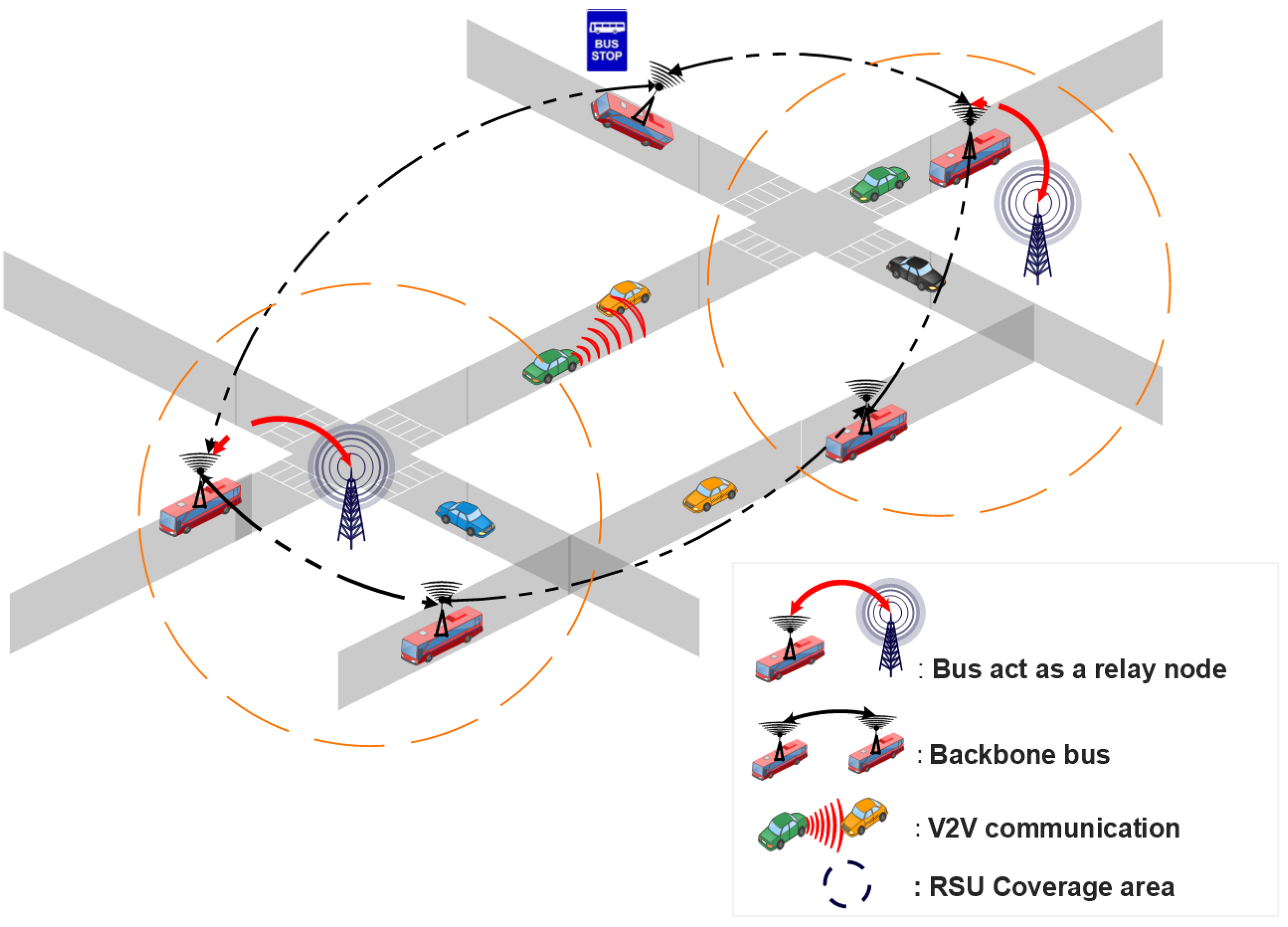
4.2.3. Bus Line Management as RSU
4.2.4. Unmanned Aerial Vehicles Acting as RSUs
5. Open Issues and Future Research Directions
5.1. Realistic Deployment Strategy
5.2. The Network Management as an RSU Deployment Constraint
5.3. Energy Saving
5.4. Dynamic Vehicle Mobility
5.5. Data Security
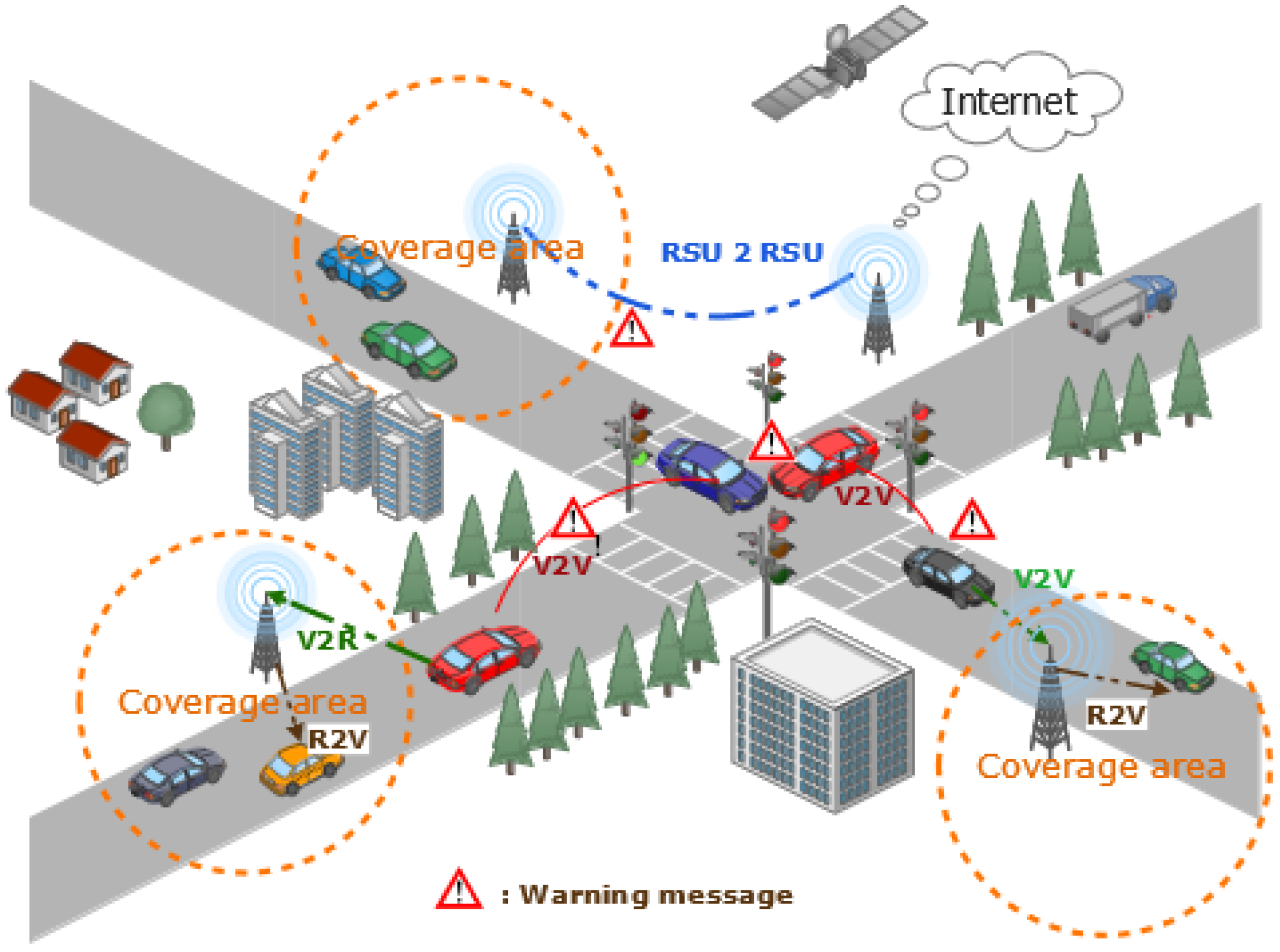
5.6. Communication Architecture
5.7. Heterogeneous Connectivity
5.8. RSUs and Edge Server Deployment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MANET | Mobile Ad-hoc Network |
| UAV | Unmanned Aerial Vehicle |
| VANET | Vehicular Ad-hoc Network |
| GPS | Global Position System |
| OBU | On-Board Units |
| RSU | Roadside Units |
| ITS | Intelligent Transport System |
| IoV | Internet of Vehicles |
| DSRC | Dedicated Short Range Communication |
| V2V | Vehicle-to-Vehicle communication |
| V2R | Vehicle-to-roadside units |
| I2I | Infrastructure-to-Infrastructure communication |
| QoS | Quality of Service |
| SCP | Set Coverage Problem |
| MCP | Maximum coverage problem |
| FLP | Facility Location problem |
| VCP | Vertex Coverage Problem |
| ILP | Integer Linear Programming |
| BEH | Balloon Expansion Heuristic |
| D1RD | One-Dimensional RSU deployment problem |
| CDT | Constrained Delaunay Triangulation |
| MCTTP | Maximum Coverage with Time Threshold Problem |
| HGA | Heuristic Genetic Algorithm |
| SUMO | Simulation of Urban MObility [128] |
| ns-2 and ns-3 | Network Simulator, versions 2 and 3 [129,130] |
| VISSIM | in German “Verkehr In Städten—SIMulationsmodell” [131] |
References
- World Health Organization. Global Status Report on Road Safety 2018. 2018. Available online: https://www.who.int/publications/i/item/9789241565684/ (accessed on 17 June 2018).
- Dar, K.; Bakhouya, M.; Gaber, J.; Wack, M.; Lorenz, P. Wireless communication technologies for ITS applications [Topics in Automotive Networking]. IEEE Commun. Mag. 2010, 48, 156–162. [Google Scholar] [CrossRef]
- Da Cunha, F.D.; Boukerche, A.; Villas, L.; Viana, A.C.; Loureiro, A.A. Data Communication in VANETs: A Survey, Challenges and Applications. Ph.D. Thesis, INRIA Saclay, Palaiseau, France, 2014. [Google Scholar]
- Heidari, E.; Gladisch, A.; Moshiri, B.; Tavangarian, D. Survey on location information services for Vehicular Communication Networks. Wirel. Netw. 2014, 20, 1085–1105. [Google Scholar] [CrossRef]
- Borcoci, E.; Obreja, S.; Vochin, M.C. Functional layered architectures and control solutions in internet of vehicles-comparison. Int. J. Adv. Internet Technol. 2018, 11, 31–43. [Google Scholar]
- Kosmopoulos, I.; Skondras, E.; Michalas, A.; Michailidis, E.T.; Vergados, D.D. Handover Management in 5G Vehicular Networks. Future Internet 2022, 14, 87. [Google Scholar] [CrossRef]
- Xia, F.; Yang, L.T.; Wang, L.; Vinel, A. Internet of things. Int. J. Commun. Syst. 2012, 25, 1101. [Google Scholar] [CrossRef]
- Yang, F.; Wang, S.; Li, J.; Liu, Z.; Sun, Q. An overview of internet of vehicles. China Commun. 2014, 11, 1–15. [Google Scholar] [CrossRef]
- Lee, U.; Gerla, M. A survey of urban vehicular sensing platforms. Comput. Networks 2010, 54, 527–544. [Google Scholar] [CrossRef]
- Ali, F.; Shaikh, F.K.; Ansari, A.Q.; Mahoto, N.A.; Felemban, E. Comparative analysis of VANET routing protocols: On road side unit placement strategies. Wirel. Pers. Commun. 2015, 85, 393–406. [Google Scholar] [CrossRef]
- Ni, Y.; Zhao, C.; Cai, L. Hybrid RSU Management in Cybertwin-IoV for Temporal and Spatial Service Coverage. IEEE Trans. Veh. Technol. 2021. [Google Scholar] [CrossRef]
- Muhammad, M.; Safdar, G.A. Survey on existing authentication issues for cellular-assisted V2X communication. Veh. Commun. 2018, 12, 50–65. [Google Scholar] [CrossRef]
- Dey, K.C.; Rayamajhi, A.; Chowdhury, M.; Bhavsar, P.; Martin, J. Vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication in a heterogeneous wireless network—Performance evaluation. Transp. Res. Part C Emerg. Technol. 2016, 68, 168–184. [Google Scholar] [CrossRef] [Green Version]
- Nikookaran, N.; Karakostas, G.; Todd, T.D. Combining capital and operating expenditure costs in vehicular roadside unit placement. IEEE Trans. Veh. Technol. 2017, 66, 7317–7331. [Google Scholar] [CrossRef]
- Yang, H.; Jia, Z.; Xie, G. Delay-bounded and cost-limited RSU deployment in urban vehicular ad hoc networks. Sensors 2018, 18, 2764. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ackels, S.; Benavidez, P.; Jamshidi, M. A Survey of Modern Roadside Unit Deployment Research. In Proceedings of the 2021 World Automation Congress (WAC), Taipei, Taiwan, 1–5 August 2021; pp. 7–14. [Google Scholar]
- Silva, C.M.; Masini, B.M.; Ferrari, G.; Thibault, I. A survey on infrastructure-based vehicular networks. Mob. Inf. Syst. 2017, 2017, 6123868. [Google Scholar] [CrossRef] [Green Version]
- Yousefi, S.; Mousavi, M.S.; Fathy, M. Vehicular ad hoc networks (VANETs): Challenges and perspectives. In Proceedings of the 2006 6th International Conference on ITS Telecommunications, Chengdu, China, 21–23 June 2006; pp. 761–766. [Google Scholar]
- Hasrouny, H.; Samhat, A.E.; Bassil, C.; Laouiti, A. VANet security challenges and solutions: A survey. Veh. Commun. 2017, 7, 7–20. [Google Scholar] [CrossRef]
- Zeadally, S.; Hunt, R.; Chen, Y.S.; Irwin, A.; Hassan, A. Vehicular ad hoc networks (VANETS): Status, results, and challenges. Telecommun. Syst. 2012, 50, 217–241. [Google Scholar] [CrossRef]
- Al-Sultan, S.; Al-Doori, M.M.; Al-Bayatti, A.H.; Zedan, H. A comprehensive survey on vehicular ad hoc network. J. Netw. Comput. Appl. 2014, 37, 380–392. [Google Scholar] [CrossRef]
- Kenney, J.B. Dedicated short-range communications (DSRC) standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Karagiannis, G.; Altintas, O.; Ekici, E.; Heijenk, G.; Jarupan, B.; Lin, K.; Weil, T. Vehicular networking: A survey and tutorial on requirements, architectures, challenges, standards and solutions. IEEE Commun. Surv. Tutor. 2011, 13, 584–616. [Google Scholar] [CrossRef]
- Malik, R.; Zaidan, A.; Zaidan, B.; Ramli, K.; Albahri, O.; Kareem, Z.; Ameen, H.; Garfan, S.; Mohammed, A.; Zaidan, R.; et al. Novel roadside unit positioning framework in the context of the vehicle-to-infrastructure communication system based on AHP—Entropy for weighting and borda—VIKOR for uniform ranking. Int. J. Inf. Technol. Decis. Mak. 2021, 1–34. [Google Scholar] [CrossRef]
- Mejri, M.N.; Ben-Othman, J.; Hamdi, M. Survey on VANET security challenges and possible cryptographic solutions. Veh. Commun. 2014, 1, 53–66. [Google Scholar] [CrossRef]
- Ghori, M.R.; Zamli, K.Z.; Quosthoni, N.; Hisyam, M.; Montaser, M. Vehicular ad-hoc network (VANET). In Proceedings of the 2018 IEEE International Conference on Innovative Research and Development (ICIRD), Bangkok, Thailand, 11 May 2018; pp. 1–6. [Google Scholar]
- Englund, C.; Chen, L.; Vinel, A.; Lin, S.Y. Future applications of VANETs. In Vehicular ad hoc Networks; Springer: Berlin/Heidelberg, Germany, 2015; pp. 525–544. [Google Scholar]
- Sou, S.I.; Tonguz, O.K. Enhancing VANET connectivity through roadside units on highways. IEEE Trans. Veh. Technol. 2011, 60, 3586–3602. [Google Scholar] [CrossRef]
- Nguyen, B.L.; Ngo, D.T.; Tran, N.H.; Dao, M.N.; Vu, H.L. Dynamic V2I/V2V cooperative scheme for connectivity and throughput enhancement. IEEE Trans. Intell. Transp. Syst. 2020, 23, 1236–1246. [Google Scholar] [CrossRef]
- Jalooli, A.; Song, M.; Wang, W. Message coverage maximization in infrastructure-based urban vehicular networks. Veh. Commun. 2019, 16, 1–14. [Google Scholar] [CrossRef]
- Rashid, S.A.; Audah, l.; Hamdi, M.M.; Alani, S. An overview on quality of service and data dissemination in VANETs. In Proceedings of the 2020 International Congress on Human-Computer Interaction, Optimization and Robotic Applications (HORA), Ankara, Turkey, 26–28 June 2020; pp. 1–5. [Google Scholar]
- Lochert, C.; Scheuermann, B.; Wewetzer, C.; Luebke, A.; Mauve, M. Data aggregation and roadside unit placement for a vanet traffic information system. In Proceedings of the 5th ACM International Workshop on VehiculAr Inter-NETworking, San Francisco, CA, USA, 15 September 2008; pp. 58–65. [Google Scholar]
- Liu, H.Q.; Yang, L.C.; Yang, T. A connectivity-based strategy for roadside units placement in vehicular ad hoc networks. IEEE Int. J. Hybrid Inf. Technol. 2014, 7, 91. [Google Scholar] [CrossRef] [Green Version]
- Ligo, A.K.; Peha, J.M. Cost-effectiveness of sharing roadside infrastructure for Internet of Vehicles. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2362–2372. [Google Scholar] [CrossRef]
- Zhang, K.; Mao, Y.; Leng, S.; He, Y.; Zhang, Y. Mobile-edge computing for vehicular networks: A promising network paradigm with predictive off-loading. IEEE Veh. Technol. Mag. 2017, 12, 36–44. [Google Scholar] [CrossRef]
- Wisitpongphan, N.; Bai, F.; Mudalige, P.; Sadekar, V.; Tonguz, O. Routing in sparse vehicular ad hoc wireless networks. IEEE J. Sel. Areas Commun. 2007, 25, 1538–1556. [Google Scholar] [CrossRef]
- Ou, D.; Yang, Y.; Xue, L.; Dong, D. Optimal connectivity-based deployment of roadside units for vehicular networks in urban areas. Transp. Res. Rec. 2016, 2559, 46–56. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, J. Connectivity analysis of a highway with one entry/exit and multiple roadside units. IEEE Trans. Veh. Technol. 2018, 67, 11705–11718. [Google Scholar] [CrossRef]
- Xue, L.; Yang, Y.; Dong, D. Roadside infrastructure planning scheme for the urban vehicular networks. Transp. Res. Procedia 2017, 25, 1380–1396. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, N.; Fang, X.; Yang, P.; Shen, X.S. Cost-effective vehicular network planning with cache-enabled green roadside units. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- Ota, K.; Kumrai, T.; Dong, M.; Kishigami, J.; Guo, M. Smart infrastructure design for smart cities. IT Prof. 2017, 19, 42–49. [Google Scholar] [CrossRef]
- Kumrai, T.; Ota, K.; Dong, M.; Champrasert, P. RSU placement optimization in vehicular participatory sensing networks. In Proceedings of the 2014 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 27 April–2 May 2014; pp. 207–208. [Google Scholar]
- Patil, P.; Gokhale, A. Voronoi-based placement of road-side units to improve dynamic resource management in vehicular ad hoc networks. In Proceedings of the 2013 International Conference on Collaboration Technologies and Systems (CTS), San Diego, CA, USA, 20–24 May 2013; pp. 389–396. [Google Scholar]
- Wu, T.J.; Liao, W.; Chang, C.J. A cost-effective strategy for road-side unit placement in vehicular networks. IEEE Trans. Commun. 2012, 60, 2295–2303. [Google Scholar] [CrossRef]
- Aslam, B.; Amjad, F.; Zou, C.C. Optimal roadside units placement in urban areas for vehicular networks. In Proceedings of the 2012 IEEE Symposium on Computers and Communications (ISCC), Cappadocia, Turkey, 1–4 July 2012; pp. 000423–000429. [Google Scholar]
- Caprara, A.; Fischetti, M.; Toth, P. A heuristic method for the set covering problem. Oper. Res. 1999, 47, 730–743. [Google Scholar] [CrossRef]
- Trullols, O.; Fiore, M.; Casetti, C.; Chiasserini, C.F.; Ordinas, J.B. Planning roadside infrastructure for information dissemination in intelligent transportation systems. Comput. Commun. 2010, 33, 432–442. [Google Scholar] [CrossRef]
- Maximum Coverage Problem. Available online: https://en.wikipedia.org/wiki/Maximum_coverage_problem (accessed on 29 January 2022).
- Sahni, S. Approximate algorithms for the 0/1 knapsack problem. J. ACM 1975, 22, 115–124. [Google Scholar] [CrossRef]
- Ni, Y.; He, J.; Cai, L.; Pan, J.; Bo, Y. Joint roadside unit deployment and service task assignment for Internet of Vehicles (IoV). IEEE Internet Things J. 2018, 6, 3271–3283. [Google Scholar] [CrossRef]
- Shmoys, D.B.; Tardos, É.; Aardal, K. Approximation algorithms for facility location problems. In Proceedings of the Twenty-Ninth Annual ACM Symposium on Theory of Computing, El Paso, TX, USA, 4–6 May 1997; pp. 265–274. [Google Scholar]
- Liu, C.; Huang, H.; Du, H.; Jia, X. Optimal RSUs placement with delay bounded message dissemination in vehicular networks. J. Comb. Optim. 2017, 33, 1276–1299. [Google Scholar] [CrossRef]
- Guerna, A.; Bitam, S. GICA: An evolutionary strategy for roadside units deployment in vehicular networks. In Proceedings of the 2019 International Conference on Networking and Advanced Systems (ICNAS), Annaba, Algeria, 26–27 June 2019; pp. 1–6. [Google Scholar]
- Khuller, S.; Moss, A.; Naor, J.S. The budgeted maximum coverage problem. Inf. Process. Lett. 1999, 70, 39–45. [Google Scholar] [CrossRef]
- Mchergui, A.; Moulahi, T.; Alaya, B.; Nasri, S. A survey and comparative study of QoS aware broadcasting techniques in VANET. Telecommun. Syst. 2017, 66, 253–281. [Google Scholar] [CrossRef]
- Ben Chaabene, S.; Yeferny, T.; Ben Yahia, S. A roadside unit deployment framework for enhancing transportation services in Maghrebian cities. Concurr. Comput. Pract. Exp. 2021, 33, e5611. [Google Scholar] [CrossRef]
- Hadded, M.; Muhlethaler, P.; Laouiti, A.; Saidane, L.A. A centralized TDMA based scheduling algorithm for real-time communications in vehicular ad hoc networks. In Proceedings of the 2016 24th International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 22–24 September 2016; pp. 1–6. [Google Scholar]
- Muazu, A.A.; Lawal, I.A. Quality of Service Guarantees in Vehicular Networks Using Cluster. SLU J. Sci. Technol. 2021, 2, 73–83. [Google Scholar]
- Singh, P. Comparative study between unicast and Multicast Routing Protocols in different data rates using vanet. In Proceedings of the 2014 International Conference on Issues and Challenges in Intelligent Computing Techniques (ICICT), Ghaziabad, India, 7–8 February 2014; pp. 278–284. [Google Scholar]
- Liya, X.; Chuanhe, H.; Peng, L.; Junyu, Z. A randomized algorithm for roadside units placement in vehicular ad hoc network. In Proceedings of the 2013 IEEE 9th International Conference on Mobile Ad-hoc and Sensor Networks, Dalian, China, 11–13 December 2013; pp. 193–197. [Google Scholar]
- Gao, Z.; Chen, D.; Cai, S.; Wu, H.C. Optimal and greedy algorithms for the one-dimensional RSU deployment problem with new model. IEEE Trans. Veh. Technol. 2018, 67, 7643–7657. [Google Scholar] [CrossRef]
- Gao, Z.; Chen, D.; Cai, S.; Wu, H.C. Optdynlim: An optimal algorithm for the one-dimensional rsu deployment problem with nonuniform profit density. IEEE Trans. Ind. Inform. 2018, 15, 1052–1061. [Google Scholar] [CrossRef]
- Aurenhammer, F. Voronoi diagrams—A survey of a fundamental geometric data structure. ACM Comput. Surv. (CSUR) 1991, 23, 345–405. [Google Scholar] [CrossRef]
- Cheng, H.; Fei, X.; Boukerche, A.; Almulla, M. GeoCover: An efficient sparse coverage protocol for RSU deployment over urban VANETs. Ad Hoc Netw. 2015, 24, 85–102. [Google Scholar] [CrossRef]
- Ghorai, C.; Banerjee, I. A constrained Delaunay Triangulation based RSUs deployment strategy to cover a convex region with obstacles for maximizing communications probability between V2I. Veh. Commun. 2018, 13, 89–103. [Google Scholar] [CrossRef]
- Chew, L.P. Constrained delaunay triangulations. Algorithmica 1989, 4, 97–108. [Google Scholar] [CrossRef]
- Fogue, M.; Sanguesa, J.A.; Martinez, F.J.; Marquez-Barja, J.M. Improving roadside unit deployment in vehicular networks by exploiting genetic algorithms. Appl. Sci. 2018, 8, 86. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Huang, H.; Du, H. Optimal RSUs deployment with delay bound along highways in VANET. J. Comb. Optim. 2017, 33, 1168–1182. [Google Scholar] [CrossRef]
- Cavalcante, E.S.; Aquino, A.L.; Pappa, G.L.; Loureiro, A.A. Roadside unit deployment for information dissemination in a VANET: An evolutionary approach. In Proceedings of the 14th Annual Conference Companion on Genetic and Evolutionary Computation, New York, NY, USA, 7–11 July 2012; pp. 27–34. [Google Scholar]
- Jalooli, A.; Song, M.; Xu, X. Delay efficient disconnected rsu placement algorithm for vanet safety applications. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017; pp. 1–6. [Google Scholar]
- Ahmed, Z.; Naz, S.; Ahmed, J. Minimizing transmission delays in vehicular ad hoc networks by optimized placement of road-side unit. Wirel. Netw. 2020, 26, 2905–2914. [Google Scholar] [CrossRef]
- Silva, C.M.; Pitangui, C.G.; Miguel, E.C.; Santos, L.A.; Torres, K.B. Gamma-Reload Deployment: Planning the communication infrastructure for serving streaming for connected vehicles. Veh. Commun. 2020, 21, 100197. [Google Scholar] [CrossRef]
- Jo, Y.; Jeong, J. RPA: Road-side units placement algorithm for multihop data delivery in vehicular networks. In Proceedings of the 2016 30th International Conference on Advanced Information Networking and Applications Workshops (WAINA), Crans-Montana, Switzerland, 23–25 March 2016; pp. 262–266. [Google Scholar]
- Adebowale, A.O. Wireless Access in Vehicular Environments (WAVE); Department of Electrical and Electronic Engineering, University of Bristol: Bristol, UK, 2011. [Google Scholar]
- Silva, C.M.; Aquino, A.L.; Meira, W., Jr. Deployment of roadside units based on partial mobility information. Comput. Commun. 2015, 60, 28–39. [Google Scholar] [CrossRef]
- Moura, D.L.; Cabral, R.S.; Sales, T.; Aquino, A.L. An evolutionary algorithm for roadside unit deployment with betweenness centrality preprocessing. Future Gener. Comput. Syst. 2018, 88, 776–784. [Google Scholar] [CrossRef]
- Guerna, A.; Bitam, S.; Calafate, C.T. AC-RDV: A novel ant colony system for roadside units deployment in vehicular ad hoc networks. Peer-to-Peer Netw. Appl. 2020, 14, 1–17. [Google Scholar] [CrossRef]
- Chi, J.; Jo, Y.; Park, H.; Park, S. Intersection-priority based optimal RSU allocation for VANET. In Proceedings of the 2013 Fifth International Conference on Ubiquitous and Future Networks (ICUFN), Da Nang, Vietnam, 2–5 July 2013; pp. 350–355. [Google Scholar]
- Wang, F.; Wang, C.; Wang, K.; Jiang, Q.; Wang, B.; He, W. Multiobjective Differential Evolution with Discrete Elite Guide in Internet of Vehicles Roadside Unit Deployment. Wirel. Commun. Mob. Comput. 2021, 2021, 4207130. [Google Scholar] [CrossRef]
- Gao, Z.; Chen, D.; Yao, N.; Lu, Z.; Chen, B. A novel problem model and solution scheme for roadside unit deployment problem in VANETs. Wirel. Pers. Commun. 2018, 98, 651–663. [Google Scholar] [CrossRef]
- Barrachina, J.; Garrido, P.; Fogue, M.; Martinez, F.J.; Cano, J.C.; Calafate, C.T.; Manzoni, P. Road side unit deployment: A density-based approach. IEEE Intell. Transp. Syst. Mag. 2013, 5, 30–39. [Google Scholar] [CrossRef]
- Sankaranarayanan, M.; Chelliah, M.; Mathew, S. A Feasible RSU Deployment Planner Using Fusion Algorithm. Wirel. Pers. Commun. 2021, 116, 1849–1866. [Google Scholar] [CrossRef]
- Liang, Y.; Liu, H.; Rajan, D. Optimal placement and configuration of roadside units in vehicular networks. In Proceedings of the 2012 IEEE 75th Vehicular Technology Conference (VTC Spring), Yokohama, Japan, 6–9 May 2012; pp. 1–6. [Google Scholar]
- Kafsi, M.; Papadimitratos, P.; Dousse, O.; Alpcan, T.; Hubaux, J.P. VANET connectivity analysis. arXiv 2009, arXiv:0912.5527. [Google Scholar]
- Zheng, Z.; Sinha, P.; Kumar, S. Sparse WiFi deployment for vehicular internet access with bounded interconnection gap. IEEE/ACM Trans. Netw. 2011, 20, 956–969. [Google Scholar] [CrossRef] [Green Version]
- Eth Zurich Trace. Available online: https://www.lst.inf.ethz.ch/research/ad-hoc/realistic-vehicular-traces.html/ (accessed on 15 March 2022).
- Vehicular Mobility Trace of the City of Cologne, Germany. Available online: http://kolntrace.project.citi-lab.fr/# (accessed on 15 March 2022).
- Tonguz, O.K.; Viriyasitavat, W. Cars as roadside units: A self-organizing network solution. IEEE Commun. Mag. 2013, 51, 112–120. [Google Scholar] [CrossRef]
- Tonguz, O.K. Biologically inspired solutions to fundamental transportation problems. IEEE Commun. Mag. 2011, 49, 106–115. [Google Scholar] [CrossRef]
- Sommer, C.; Eckhoff, D.; Dressler, F. IVC in cities: Signal attenuation by buildings and how parked cars can improve the situation. IEEE Trans. Mob. Comput. 2013, 13, 1733–1745. [Google Scholar] [CrossRef]
- Reis, A.B.; Sargento, S. Leveraging parked cars as urban self-organizing road-side units. In Proceedings of the 2015 IEEE 82nd Vehicular Technology Conference (VTC2015-Fall), Boston, MA, USA, 6–9 September 2015; pp. 1–5. [Google Scholar]
- Reis, A.B.; Sargento, S.; Tonguz, O.K. Parked cars are excellent roadside units. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2490–2502. [Google Scholar] [CrossRef] [Green Version]
- Jiang, X.; Du, D.H. Bus-vanet: A bus vehicular network integrated with traffic infrastructure. IEEE Intell. Transp. Syst. Mag. 2015, 7, 47–57. [Google Scholar] [CrossRef]
- Kim, D.; Velasco, Y.; Wang, W.; Uma, R.; Hussain, R.; Lee, S. A new comprehensive RSU installation strategy for cost-efficient VANET deployment. IEEE Trans. Veh. Technol. 2016, 66, 4200–4211. [Google Scholar] [CrossRef]
- Lee, J.; Ahn, S. Adaptive configuration of mobile roadside units for the cost-effective vehicular communication infrastructure. Wirel. Commun. Mob. Comput. 2019, 2019, 6594084. [Google Scholar] [CrossRef]
- Heo, J.; Kang, B.; Yang, J.M.; Paek, J.; Bahk, S. Performance-cost trade-off of using mobile roadside units for V2X communication. IEEE Trans. Veh. Technol. 2019, 68, 9049–9059. [Google Scholar] [CrossRef]
- Zaidi, S.; Atiquzzaman, M.; Calafate, C.T. Internet of flying things (IoFT): A survey. Comput. Commun. 2021, 165, 53–74. [Google Scholar] [CrossRef]
- Alzahrani, B.; Oubbati, O.S.; Barnawi, A.; Atiquzzaman, M.; Alghazzawi, D. UAV assistance paradigm: State-of-the-art in applications and challenges. J. Netw. Comput. Appl. 2020, 166, 102706. [Google Scholar] [CrossRef]
- Raza, A.; Bukhari, S.H.R.; Aadil, F.; Iqbal, Z. An UAV-assisted VANET architecture for intelligent transportation system in smart cities. Int. J. Distrib. Sens. Networks 2021, 17. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Chaib, N.; Lakas, A.; Lorenz, P.; Rachedi, A. UAV-assisted supporting services connectivity in urban VANETs. IEEE Trans. Veh. Technol. 2019, 68, 3944–3951. [Google Scholar] [CrossRef] [Green Version]
- Sami Oubbati, O.; Chaib, N.; Lakas, A.; Bitam, S.; Lorenz, P. U2RV: UAV-assisted reactive routing protocol for VANETs. Int. J. Commun. Syst. 2020, 33, e4104. [Google Scholar] [CrossRef] [Green Version]
- Cai, R.; Feng, Y.; He, D.; Xu, Y.; Zhang, Y.; Xie, W. A combined CA Coable-Connected RSU and UAV-Assisted RSU Deployment Strategy in V2I Communication. In Proceedings of the ICC 2020—2020 IEEE International Conference on Communications (ICC), Online, 7–11 July 2020; pp. 1–6. [Google Scholar]
- Viriyasitavat, W.; Tonguz, O.K.; Bai, F. UV-CAST: An urban vehicular broadcast protocol. IEEE Commun. Mag. 2011, 49, 116–124. [Google Scholar] [CrossRef]
- Tonguz, O.K.; Viriyasitavat, W.; Bai, F. Modeling urban traffic: A cellular automata approach. IEEE Commun. Mag. 2009, 47, 142–150. [Google Scholar] [CrossRef]
- Riebl, R.; Günther, H.J.; Facchi, C.; Wolf, L. Artery: Extending veins for VANET applications. In Proceedings of the 2015 International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Budapest, Hungary, 3–5 June 2015; pp. 450–456. [Google Scholar]
- Nzouonta, J.; Rajgure, N.; Wang, G.; Borcea, C. VANET routing on city roads using real-time vehicular traffic information. IEEE Trans. Veh. Technol. 2009, 58, 3609–3626. [Google Scholar] [CrossRef] [Green Version]
- Clausen, T.; Jacquet, P.; Adjih, C.; Laouiti, A.; Minet, P.; Muhlethaler, P.; Qayyum, A.; Viennot, L. Optimized Link State Routing Protocol (OLSR). 2003. Available online: https://hal.inria.fr/inria-00471712 (accessed on 15 March 2022).
- Oubbati, O.S.; Lakas, A.; Lagraa, N.; Yagoubi, M.B. CRUV: Connectivity-based traffic density aware routing using UAVs for VANets. In Proceedings of the 2015 International Conference on Connected Vehicles and Expo (ICCVE), Shenzhen, China, 19–23 October 2015; pp. 68–73. [Google Scholar]
- Oubbati, O.S.; Lakas, A.; Lagraa, N.; Yagoubi, M.B. UVAR: An intersection UAV-assisted VANET routing protocol. In Proceedings of the 2016 IEEE Wireless Communications and Networking Conference, Doha, Qatar, 3–6 April 2016; pp. 1–6. [Google Scholar]
- Mo, Z.; Zhu, H.; Makki, K.; Pissinou, N. MURU: A multi-hop routing protocol for urban vehicular ad hoc networks. In Proceedings of the 2006 3rd Annual International Conference on Mobile and Ubiquitous Systems: Networking & Services, San Jose, CA, USA, 17–21 July 2006; pp. 1–8. [Google Scholar]
- Yan, S.; JIN, X.y.; CHEN, S.z. AGP: An anchor-geography based routing protocol with mobility prediction for VANET in city scenarios. J. China Univ. Posts Telecommun. 2011, 18, 112–117. [Google Scholar]
- Singh, G.D.; Prateek, M.; Kumar, S.; Verma, M.; Singh, D.; Lee, H.N. Hybrid Genetic Firefly Algorithm-based Routing Protocol for VANETs. IEEE Access 2022, 10, 9142–9151. [Google Scholar] [CrossRef]
- Kaul, A.; Altaf, I. Vehicular adhoc network-traffic safety management approach: A traffic safety management approach for smart road transportation in vehicular ad hoc networks. Int. J. Commun. Syst. 2022, e5132. [Google Scholar] [CrossRef]
- Atallah, R.; Khabbaz, M.; Assi, C. Energy harvesting in vehicular networks: A contemporary survey. IEEE Wirel. Commun. 2016, 23, 70–77. [Google Scholar] [CrossRef]
- Cesarano, L.; Croce, A.; Martins, L.D.C.; Tarchi, D.; Juan, A.A. A Real-time Energy-Saving Mechanism in Internet of Vehicles Systems. IEEE Access 2021, 9, 157842–157858. [Google Scholar] [CrossRef]
- Hbaieb, A.; Ayed, S.; Chaari, L. A survey of trust management in the Internet of Vehicles. Comput. Netw. 2022, 203, 108558. [Google Scholar] [CrossRef]
- Bagheri, H.; Noor-A-Rahim, M.; Liu, Z.; Lee, H.; Pesch, D.; Moessner, K.; Xiao, P. 5G NR-V2X: Toward connected and cooperative autonomous driving. IEEE Commun. Stand. Mag. 2021, 5, 48–54. [Google Scholar] [CrossRef]
- Shayea, I.; Ergen, M.; Azmi, M.H.; Çolak, S.A.; Nordin, R.; Daradkeh, Y.I. Key challenges, drivers and solutions for mobility management in 5G networks: A survey. IEEE Access 2020, 8, 172534–172552. [Google Scholar] [CrossRef]
- Huang, X.; Yu, R.; Pan, M.; Shu, L. Secure roadside unit hotspot against eavesdropping based traffic analysis in edge computing based internet of vehicles. IEEE Access 2018, 6, 62371–62383. [Google Scholar] [CrossRef]
- Artail, H.; Abbani, N. A pseudonym management system to achieve anonymity in vehicular ad hoc networks. IEEE Trans. Dependable Secur. Comput. 2015, 13, 106–119. [Google Scholar] [CrossRef]
- Kaiwartya, O.; Abdullah, A.H.; Cao, Y.; Altameem, A.; Prasad, M.; Lin, C.T.; Liu, X. Internet of vehicles: Motivation, layered architecture, network model, challenges, and future aspects. IEEE Access 2016, 4, 5356–5373. [Google Scholar] [CrossRef]
- Benalia, E.; Bitam, S.; Mellouk, A. Data dissemination for Internet of vehicle based on 5G communications: A survey. Trans. Emerg. Telecommun. Technol. 2020, 31, e3881. [Google Scholar] [CrossRef]
- Zekri, A.; Jia, W. Heterogeneous vehicular communications: A comprehensive study. Ad Hoc Netw. 2018, 75, 52–79. [Google Scholar] [CrossRef]
- Khasawneh, A.M.; Helou, M.A.; Khatri, A.; Aggarwal, G.; Kaiwartya, O.; Altalhi, M.; Abu-Ulbeh, W.; AlShboul, R. Service-centric heterogeneous vehicular network modeling for connected traffic environments. Sensors 2022, 22, 1247. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.C.; Deng, D.J.; Yao, C.C. Resource allocation in vehicular cloud computing systems with heterogeneous vehicles and roadside units. IEEE Internet Things J. 2017, 5, 3692–3700. [Google Scholar] [CrossRef]
- Xu, L.; Ge, M.; Wu, W.; Member IEEE. Edge server deployment scheme of blockchain in IoVs. arXiv 2020, arXiv:2006.12372. [Google Scholar]
- Cao, B.; Fan, S.; Zhao, J.; Tian, S.; Zheng, Z.; Yan, Y.; Yang, P. Large-Scale Many-Objective Deployment Optimization of Edge Servers. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3841–3849. [Google Scholar] [CrossRef]
- Simulation of Urban MObility. Available online: https://sumo.dlr.de/docs/Tutorials/index.html (accessed on 4 April 2022).
- Network Simulator ns-2. Available online: https://www.ns2project.com/ns2-simulator-tutorial-for-beginners/ (accessed on 15 March 2022).
- Network Simulator ns-3. Available online: https://www.nsnam.org/docs/tutorial/html/ (accessed on 18 April 2022).
- AG, PPTV. VISSIM “Verkehr In Städten–SIMulationsmodell”. Available online: https://www.ptvgroup.com/fr/solutions/produits/ptv-vissim/champs-dapplication/simulation-flux-de-trafic/ (accessed on 14 August 2018).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sub-Class | Ref | Typologies | Communication | RSUs Locations | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Highway | Urban Complex | Urban Grid | Rural | V2V | V2R | Muti-Hop | Backbone network | Intersection | Road Segment | Uniform Distribution | A Distinct Locations | ||
| Analytic Study | [60] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||
| [44] | ✓ | ✓ | ✓ | ✓ | |||||||||
| [45] | ✓ | ✓ | ✓ | ||||||||||
| [61] | ✓ | ||||||||||||
| [62] | ✓ | ||||||||||||
| Geometry Parameters | [43] | ✓ | ✓ | ✓ | ✓ | ||||||||
| [64] | ✓ | ✓ | |||||||||||
| [65] | ✓ | ✓ | ✓ | ✓ | |||||||||
| [67] | ✓ | ✓ | ✓ | ✓ | |||||||||
| Transmission Time | [15] | ✓ | ✓ | ✓ | ✓ | ||||||||
| [50] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [68] | ✓ | ✓ | ✓ | ||||||||||
| [69] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [70] | ✓ | ✓ | ✓ | ✓ | |||||||||
| [71] | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||||
| [72] | ✓ | ✓ | ✓ | ||||||||||
| Maximum coverage | [53] | ✓ | ✓ | ✓ | |||||||||
| [73] | ✓ | ✓ | ✓ | ✓ | |||||||||
| [75] | ✓ | ✓ | ✓ | ||||||||||
| [76] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||
| [77] | ✓ | ✓ | ✓ | ||||||||||
| [79] | ✓ | ✓ | ✓ | ||||||||||
| [80] | ✓ | ✓ | ✓ | ||||||||||
| Network Area Density | [32] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||
| [78] | ✓ | ✓ | ✓ | ✓ | |||||||||
| [81] | ✓ | ✓ | ✓ | ✓ | |||||||||
| [82] | ✓ | ✓ | ✓ | ✓ | |||||||||
| Ref | Main Objective | Constraints | Model | Algorithm | Compared to | Mobility Trace | Simulator |
|---|---|---|---|---|---|---|---|
| [60] | Maximize the deployment | Connectivity probability | Mathematics study | Randomized | Optimal algorithm [83] | 100 km highway | Specific |
| distance | threshold p and the time t | segment | |||||
| [44] | Maximize the achievable | Deployment budget | ILP | Capacity Maximization | Uniformly distributed | 1250 m by 150 | VanetMobisim, ns-2 |
| throughput in the network to | Placement (CMP) Strategy | and hotspot placements | highway | ||||
| aggregate direct and multi-hop | |||||||
| communication | |||||||
| [45] | Minimize the reporting time | The RSUs number | ILP | BIP and BEH | Between them | Manhattan topology | Specific |
| [61] | Maximize the coverage | n RSUs number | OptGreDyn, Greedy2P3 | OptAll, OptDynLim, BEP [45], | No mobility trace | MATLAB | |
| and Greedy2P3E | GreedyMiddle [84] | ||||||
| [62] | Maximize the coverage | n RSUs number | OptDynLim | OptAll and Genetic | No mobility trace | MATLAB | |
| [43] | Maximise the RSU range | Required QoS | Voronoi graph | Voronoi diagram | Uniform distribution | Nashville, TN, USA | SUMO, ns-2 |
| [64] | Maximize the coverage. | Budget sparse coverage | Geomantic | -DBSCAN, | coverage [85] | Ottawa’s downtown | SUMO, ns-2 |
| Minimize the cost | Qualified sparse coverage | and ILP models | genetic and greedy | ||||
| [65] | Minimize the delay | The RSUs number | CDT | Constrained Delaunay | GeoCover [64] and | Ottawa’s downtown, | EXataCyber-5.4 |
| coverage [85] | Manhattan, and Rome | ||||||
| [67] | Maximize the coverage | Time required for | Geometric model | genetic | Geographic and | Madrid, Valencia | SUMO |
| emergency messages | D-RSU [81] | (Spain) | |||||
| [15] | Maximize the coverage | Delay-bounded | 0–1 variation Knapsack | binary differential evolution | Genetic (BMCP-g) | Zhengzhou, China | SUMO |
| of road segments | and cost-limited | problem (DBCL) | |||||
| [50] | Maximize the benefit of serving | The expected delivery | FLP | ILP-based clustering | Greedy and ILP | Manhattan grid | MATLAB |
| the data dissemination tasks | requirement | ||||||
| [68] | Minimize the cost | Delay bound of transmitting | Clustering model | Mathematical study | No comparison | No real topology | Specific |
| alert messages | area | ||||||
| [69] | Maximize the coverage and | The RSU number | MCTTP | Greedy and Genetic | Between them | Zurich traces [86] | Specific |
| minimize dissemination time | |||||||
| [70] | Minimize dissemination time | Coverage radius | ILP | Safety-Based RSU | Mesh deployment policy | Chicago, IL, USA | SUMO, ns-2 |
| Placement (S-BRP) | |||||||
| [71] | Minimize the network latency due | The deployment budget | Delay Minimization | ILP | Cost-effective strategy | No realistic trace | VanetMobisim, ns-2 |
| to direct and multi-hop connections | Problem | and uniform distribution | |||||
| [72] | Maximize the interconnection gap | The contact time | Gamma deployment | Greedy and | The densest locations | Cologne, Germany [87] | SUMO |
| threshold | strategy | hill climbing | |||||
| [53] | Maximizing coverage and connectivity | Minimal number | Multi-objective | Genetic | Greedy | Manhattan topology | Specific |
| of vehicles contacting the RSU | of RSUs | ||||||
| [73] | Minimize the RSUs number | Required QoS | SCP | Greedy | Uniform and | Manhattan topology | Specific |
| data delivery | Random placement | ||||||
| [75] | Maximize the number of distinct | The RSUs number | MCP | (PMCP-b) | MCP-kp and MCP-g [47] | Cologne, Germany | SUMO |
| vehicles contacting the infrastructure | |||||||
| [76] | Maximize the number of vehicles | Time overhead for vehicles | MCTTP | Genetic | Greedy | Cologne and Zurich | Specific |
| connected to a subset of RSUs | to connect RSUs | ||||||
| [77] | Maximize coverage | Minimum number of RSUs | VCP | AC-RDV | Genetic, Greedy and HGA | No realistic trace | Specific |
| [79] | Maximize coverage | No constraints | Multi-objective | (MODE-deg) | NSGA-II, MOEA/D, | Random graphs | Specific |
| Minimize the cost | and MOEA/D-arg | ||||||
| [80] | Maximize vehicles-access | Limited number of RSU | Powerful RSU | Genetic | BEH heuristic [45] | Dalian city, China | Specific |
| demands to RSU | deployment Model | ||||||
| [32] | Maximizing the travel time | Cost-limited | Aggregation scheme | Genetic | Uniform distribution | Brunswick, Germany | VISSIM, ns-2 |
| savings of cars | Strategy | ||||||
| [78] | Maximize coverage and | Overlapped area | Intersection priority | Greedy, dynamic | Seoul, South Korea. | SUMO, ns-2 | |
| minimize the RSUs number | and hybrid | between them | |||||
| [81] | Minimize the safety message time | Deployment cost | Mobility model | D-RSU approach | Uniform Mesh deployment | Madrid, Spain | SUMO, ns-2 |
| [82] | Finding optimal location for RSUS | Installation budget. | Optimal RSU distribution | Genetic and | Greedy | Tamil Nadu, India | VISSIM |
| Transmission rang of RSUs | planer (ORDP) | D-Trimming |
| Sub-Class | Ref | Typologies | Communication | RSUs Locations | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Highway | Urban Complex | Urban Grid | V2V | V2R | U2U | Backbone Network | Vehicles as RSUs | Bus as RSU | Parked Cars | Fixed RSUs “Intersection” | UAV Acting as RSUs | ||
| Vehicle used as temporary RSU | [88] | ✓ | ✓ | ✓ | |||||||||
| Parked cars as RSU | [90] | ✓ | ✓ | ✓ | |||||||||
| [91] | ✓ | ✓ | ✓ | ✓ | |||||||||
| [92] | ✓ | ✓ | ✓ | ✓ | |||||||||
| Bus line management as RSU | [93] | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||
| [94] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||
| [95] | ✓ | ✓ | ✓ | ✓ | |||||||||
| [96] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||
| UAV acting as RSUs | [100] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ||||||
| [101] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||
| [102] | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | |||||||
| Ref | Main Objective | Constraints | Model | Algorithm | Compared to | Mobility Trace | Simulator |
|---|---|---|---|---|---|---|---|
| [88] | Maximize the network connectivity | Boundary of the network | Biologically inspired | Distributed gift-wrapping [103] | Standard scheme | CA-based mobility | Specific |
| coverage polygon | Self-organizing network | model [104] | |||||
| [90] | Maximize the coverage area | Upper bound for | A relaying algorithm | Static deployment | Manhattan Grid and | Veins [105] | |
| and signal attenuation | safety message | Ingolstadt, Germany | |||||
| [91] | Maximize the coverage of | Only 1-hop exchange | Self-organizing | Decision algorithm | Reference optimal | Porto, Portugal | SUMO |
| parked cars network | of coverage maps | network approach | scenarios | ||||
| [92] | Maximize the coverage of the | Limited number of parked | Self-organizing | On-line, greedy | Scenario without RSUs | Porto, Portugal | SUMO |
| parked network of parked cars | cars | network approach | |||||
| [93] | Minimize the number of switches | Limitation of package | BUS-VANET | Longest registration | Random and shortest | Minneapolis, USA | SUMO, ns-3 |
| from vehicles to high-tier nodes | delivery delay | architecture | distance selection | ||||
| [94] | Maximize the spatio-temporal | Limited deployment budget | Budgeted maximum | -approximation | Single deployment strategy | San Francisco, USA | SUMO |
| coverage | coverage problem (BMCP) | algorithm | (only static or mobile) | ||||
| [95] | Minimize the mRSU number in | Maximum capacity of each | Adaptive mRSU | Binary linear programming | All RSUs in active state | No real topology area | Veins |
| active state (ON-state) | mRSU | configuration mechanism | algorithm | (only static or mobile) | |||
| [96] | Optimize the performance network | The replacement cost of sRSUs | Mathematical analysis | No algorithm | With and without mRSUs | City of Manhattan | SUMO, ns-3 |
| in terms of throughput, contact time, | needs through mRSU | ||||||
| and inter-contact time | |||||||
| [100] | Optimizing VANET | Coverage area of UAVs | Routing process based | UAV-assisted | RBVT-R [106], OLSR [107], | Manhattan grid | SUMO, ns-2 |
| routing process | and existing obstructions | on flooding technique | routing protocol | CRUV [108], and UVAR [109] | |||
| [101] | Maximizing the number of | Coverage area of UAVs | UAV-assisted reactive | U2RV routing protocol | CRUV [108], and UVAR [109] | Zurich, Switzerland | SUMO, MobiSim |
| alternative solutions, and | and existing obstructions | routing protocol | MURU [110], and AGP [111] | ||||
| thus the delivery ratio | |||||||
| [102] | Maximal effective traffic | Given tough budget bound | Knapsack problem | Greedy a (TLIGA) | Random-c, Greedy-c and Greedy-u | Grid topology | Specific |
| coverage ratio (ETCR) | algorithm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guerna, A.; Bitam, S.; Calafate, C.T. Roadside Unit Deployment in Internet of Vehicles Systems: A Survey. Sensors 2022, 22, 3190. https://doi.org/10.3390/s22093190
Guerna A, Bitam S, Calafate CT. Roadside Unit Deployment in Internet of Vehicles Systems: A Survey. Sensors. 2022; 22(9):3190. https://doi.org/10.3390/s22093190
Chicago/Turabian StyleGuerna, Abderrahim, Salim Bitam, and Carlos T. Calafate. 2022. "Roadside Unit Deployment in Internet of Vehicles Systems: A Survey" Sensors 22, no. 9: 3190. https://doi.org/10.3390/s22093190
APA StyleGuerna, A., Bitam, S., & Calafate, C. T. (2022). Roadside Unit Deployment in Internet of Vehicles Systems: A Survey. Sensors, 22(9), 3190. https://doi.org/10.3390/s22093190