
Computational Methods for Parameter Identification in 2D Fractional System with Riemann–Liouville Derivative






Abstract
:1. Introduction
2. Fractional Model
2.1. Model Description
2.2. Numerical Solution of Direct Problem
- For each fixed , solve the numerical scheme in the direction x. As a consequence, we will obtain a temporary solution: :
- Then, for each fixed , solve the numerical scheme in the direction y:
3. Inverse Problem
3.1. Parameter Identification
- Two different grids ():
- –
- ,
- –
- ,
- Different levels of measurement data disturbances (errors with a normal distribution): .
3.2. Function Minimization
- Ant colony optimization algorithm (ACO).
- Hooke–Jeeves algorithm (HJ).
3.2.1. Ant Colony Optimization Algorithm
3.2.2. Hooke–Jeeves Algorithm
- Exploratory move. It is used to test the behavior of the objective function in a small selected area with the use of test steps along all directions of the orthogonal base.
- Pattern move. It consists of moving in a strictly determined manner to the next area where the next trial step is considered, but only if at least one of the steps performed was successful.
| Algorithm 1 Ant Colony Optimization algorithm (ACO). |
|
| Algorithm 2 Hooke–Jeeves algorithm (pseudocode). |
|
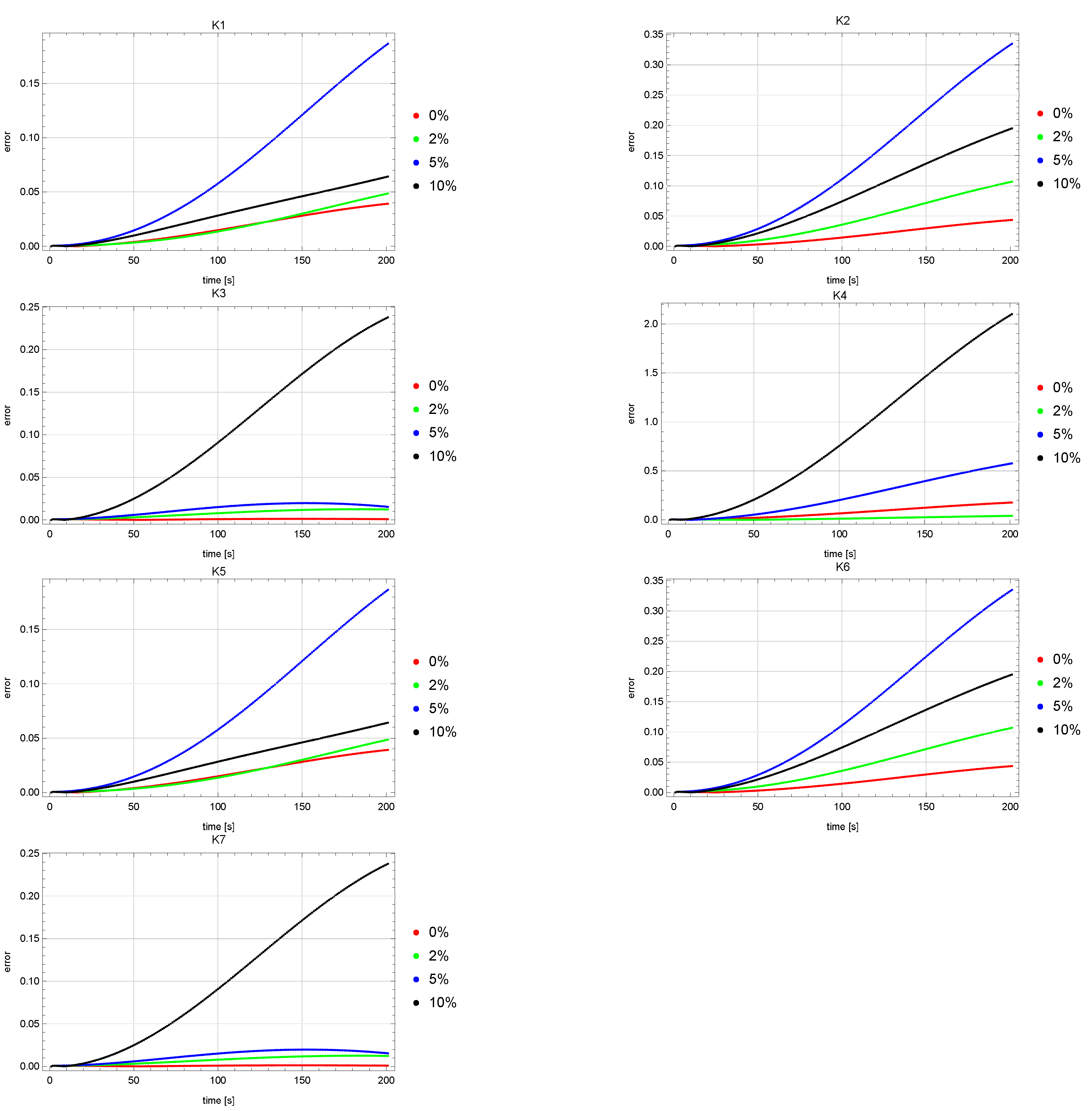
4. Results—Numerical Examples
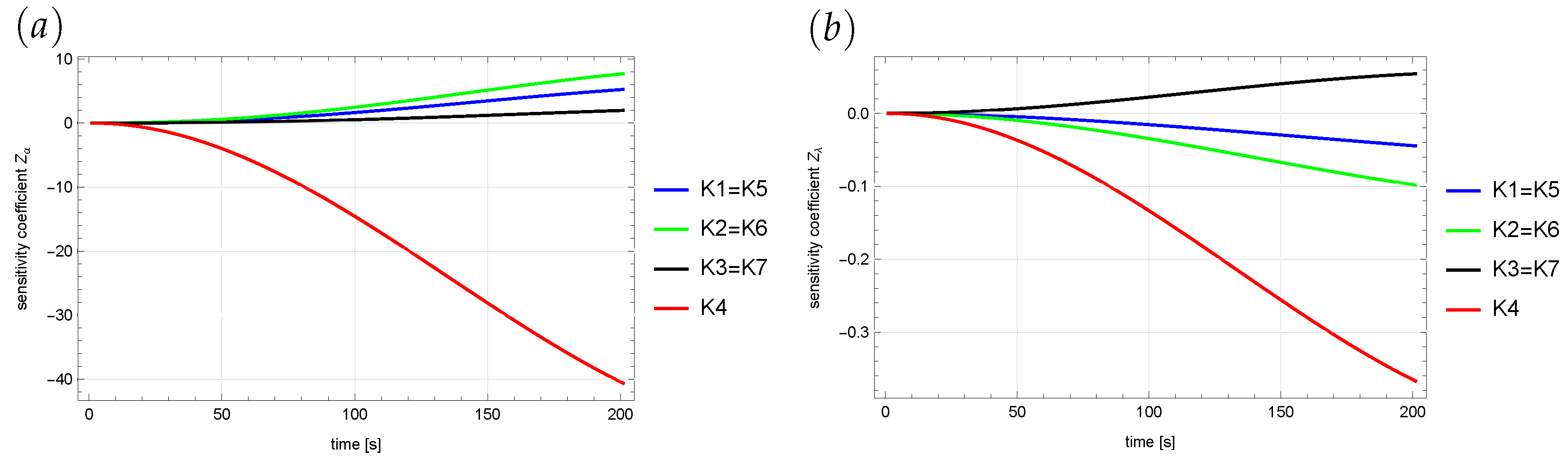
Sensitivity Analysis
5. Conclusions
- The obtained results are satisfactory and errors of parameters reconstruction are minimal.
- Both presented algorithms returned similar results, but in the case of the HJ algorithm, it was necessary to use the penalty function for one of the starting points.
- The number of evaluation of the objective function was smaller for the HJ algorithm (250–300) than for the ACO algorithm (656).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Nomenclature
| c | specific heat |
| i-th vector in orthogonal base in HJ method | |
| f | additional source term |
| value of function f in point | |
| g | auxiliary coefficient to determine |
| I | number of iterations in ACO algorithm |
| J | objective function |
| i-th measurement point | |
| L | number of pheromone spots in ACO algorithm |
| length in x-direction | |
| length in y-direction | |
| mesh size in x-direction | |
| mesh size in y-direction | |
| n | number of sought parameters in ACO algorithm |
| number of threads in ACO algorithm | |
| N | mesh size in time |
| coefficients of matrices | |
| auxiliary matrices to to describe the solution of a direct problem | |
| t | time |
| u | state function (temperature) |
| value of state function in point | |
| q | parameter in ACO algorithm |
| x | spatial variable |
| value of x variable for | |
| starting point in HJ method | |
| y | spatial variable |
| value of y variable for | |
| T | final moment of time |
| value of time for | |
| Greek Symbols | |
| order of derivative in x-direction | |
| order of derivative in y-direction | |
| gamma function | |
| auxiliary operators to describe the solution of a direct problem | |
| time step | |
| step mesh in x-direction | |
| step mesh in y-direction | |
| thermal conductivity | |
| value of thermal conductivity in point | |
| temperature in | |
| mass density | |
| stop criterion in HJ method | |
| steps length vector in HJ method | |
| weight in shifted Grünwald formula | |
| domain of differential equation |
References
- Dong, N.P.; Long, H.V.; Giang, N.L. The fuzzy fractional SIQR model of computer virus propagation in wireless sensor network using Caputo Atangana-Baleanud erivatives. Fuzzy Sets Syst. 2022, 429, 28–59. [Google Scholar] [CrossRef]
- Viera-Martin, E.; Gomez-Aguilar, J.F.; Solis-Perez, J.E.; Hernandez-Perez, J.A.; Escobar-Jimenez, R.F. Artificial neural networks: A practical review of applications involving fractional calculus. Eur. Phys. J. Spec. Top. 2022, 1–37. [Google Scholar] [CrossRef] [PubMed]
- Muresan, C.I.; Birs, I.R.; Dulf, E.H.; Copot, D.; Miclea, L. A Review of Recent Advances in Fractional-Order Sensing and Filtering Techniques. Sensors 2021, 21, 5920. [Google Scholar] [CrossRef]
- Fuss, F.K.; Tan, A.M.; Weizman, Y. ‘Electrical viscosity’ of piezoresistive sensors: Novel signal processing method, assessment of manufacturing quality, and proposal of an industrial standard. Biosens. Bioelectron. 2019, 141, 111408. [Google Scholar] [CrossRef] [PubMed]
- Lopes, A.M.; Tenreiro Machado, J.A.; Galhano, A.M. Towards fractional sensors. J. Vib. Control 2019, 25, 52–60. [Google Scholar] [CrossRef]
- Oprzędkiewicz, K.; Mitkowski, W.; Rosół, M. Fractional Order Model of the Two Dimensional Heat Transfer Process. Energies 2021, 14, 6371. [Google Scholar] [CrossRef]
- Fahmy, M.A. A new LRBFCM-GBEM modeling algorithm for general solution of time fractional-order dual phase lag bioheat transfer problems in functionally graded tissues. Numer. Heat Transf. Part A Appl. 2019, 75, 616–626. [Google Scholar] [CrossRef]
- Gao, X.; Jiang, X.; Chen, S. The numerical method for the moving boundary problem with space-fractional derivative in drug release devices. Appl. Math. Model. 2015, 39, 2385–2391. [Google Scholar] [CrossRef]
- Błasik, M.; Klimek, M. Numerical solution of the one phase 1D fractional Stefan problem using the front fixing method. Math. Methods Appl. Sci. 2014, 38, 3214–3228. [Google Scholar] [CrossRef]
- Andreozzi, A.; Brunese, L.; Iasiello, M.; Tucci, C.; Vanoli, G.P. Modeling Heat Transfer in Tumors: A Review of Thermal Therapies. Ann. Biomed. Eng. 2018, 47, 676–693. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, J.; Li, Z. A Novel Fixed-Time Trajectory Tracking Strategy of Unmanned Surface Vessel Based on the Fractional Sliding Mode Control Method. Electronics 2022, 11, 726. [Google Scholar] [CrossRef]
- Khooban, M.; Gheisarnejad, M.; Vafamand, N.; Boudjadar, J. Electric Vehicle Power Propulsion System Control Based on Time-Varying Fractional Calculus: Implementation and Experimental Results. IEEE Trans. Intell. Veh. 2019, 4, 255–264. [Google Scholar] [CrossRef]
- Błasik, M. Numerical Method for the One Phase 1D Fractional Stefan Problem Supported by an Artificial Neural Network. Adv. Intell. Syst. Comput. 2021, 1288, 568–587. [Google Scholar] [CrossRef]
- Amin, R.; Shah, K.; Asif, M.; Khan, I. A computational algorithm for the numerical solution of fractional order delay differential equations. Appl. Math. Comput. 2021, 402, 125863. [Google Scholar] [CrossRef]
- Bu, W.; Shu, S.; Yue, X.; Xiao, A.; Zeng, W. Space–time finite element method for the multi-term time–space fractional diffusion equation on a two-dimensional domain. Comput. Math. Appl. 2019, 78, 1367–1379. [Google Scholar] [CrossRef]
- Concezzi, M.; Spigler, R. An ADI Method for the Numerical Solution of 3D Fractional Reaction-Diffusion Equations. Fractal Fract. 2020, 4, 57. [Google Scholar] [CrossRef]
- Moura Neto, F.D.; da Silva Neto, A.J. An Introduction to Inverse Problems with Applications; Springer: Berlin, Germany, 2013. [Google Scholar]
- Yuldashev, T.K.; Kadirkulov, B.J. Inverse Problem for a Partial Differential Equation with Gerasimov–Caputo-Type Operator and Degeneration. Fractal Fract. 2021, 5, 58. [Google Scholar] [CrossRef]
- Kinash, N.; Janno, J. An Inverse Problem for a Generalized Fractional Derivative with an Application in Reconstruction of Time- and Space-Dependent Sources in Fractional Diffusion and Wave Equations. Mathematics 2019, 7, 1138. [Google Scholar] [CrossRef] [Green Version]
- Brociek, R.; Chmielowska, A.; Słota, D. Comparison of the probabilistic ant colony optimization algorithm and some iteration method in application for solving the inverse problem on model with the Caputo type fractional derivative. Entropy 2020, 22, 555. [Google Scholar] [CrossRef]
- Shrestha, A.; Mahmood, A. Review of deep learning algorithms and architectures. IEEE Access 2019, 7, 53040–53065. [Google Scholar] [CrossRef]
- Voller, V.R. Anomalous heat transfer: Examples, fundamentals, and fractional calculus models. Adv. Heat Transf. 2018, 50, 338–380. [Google Scholar]
- Sierociuk, D.; Dzieliński, A.; Sarwas, G.; Petras, I.; Podlubny, I.; Skovranek, T. Modelling heat transfer in heterogeneous media using fractional calculus. Philos. Trans. R. Soc. A 2013, 371, 20120146. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bagiolli, M.; La Nave, G.; Phillips, P.W. Anomalous diffusion and Noether’s second theorem. Phys. Rev. E 2021, 103, 032115. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations; Academic Press: San Diego, CA, USA, 1999. [Google Scholar]
- Tian, W.Y.; Zhou, H.; Deng, W.H. A class of second order difference approximations for solving space fractional diffusion equations. Math. Comput. 2015, 84, 1703–1727. [Google Scholar] [CrossRef] [Green Version]
- Brociek, R.; Wajda, A.; Słota, D. Inverse problem for a two-dimensional anomalous diffusion equation with a fractional derivative of the Riemann–Liouville type. Energies 2021, 14, 3082. [Google Scholar] [CrossRef]
- Barrett, R.; Berry, M.; Chan, T.F.; Demmel, J.; Donato, J.; Dongarra, J.; Eijkhout, V.; Pozo, R.; Romine, C.; der Vorst, H.V. Templates for the Solution of Linear System: Building Blocks for Iterative Methods; SIAM: Philadelphia, PA, USA, 1994. [Google Scholar]
- der Vorst, H.V. Bi-CGSTAB: A fast and smoothly converging variant of Bi-CG for the solution of nonsymmetric linear systems. SIAM J. Sci. Stat. Comput. 1992, 13, 631–644. [Google Scholar] [CrossRef]
- Yang, S.; Liu, F.; Feng, L.; Turner, I.W. Efficient numerical methods for the nonlinear two-sided space-fractional diffusion equation with variable coefficients. Appl. Numer. Math. 2020, 157, 55–68. [Google Scholar] [CrossRef]
- Jin, B.; Rundell, W. A tutorial on inverse problems for anomalous diffusion processes. Inverse Probl. 2015, 13, 035003. [Google Scholar] [CrossRef] [Green Version]
- Mohammad-Djafari, A. Regularization, Bayesian Inference, and Machine Learning Methods for Inverse Problems. Entropy 2021, 23, 1673. [Google Scholar] [CrossRef]
- Socha, K.; Dorigo, M. Ant colony optimization for continuous domains. Eur. J. Oper. Res. 2008, 185, 1155–1173. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Ma, W.; Miao, Q.; Wang, S. Multimodal continuous ant colony optimization for multisensor remote sensing image registration with local search. Swarm Evol. Comput. 2019, 47, 89–95. [Google Scholar] [CrossRef]
- Brociek, R.; Słota, D. Application of real ant colony optimization algorithm to solve space fractional heat conduction inverse problem. Commun. Comput. Inf. Sci. 2016, 639, 369–379. [Google Scholar] [CrossRef]
- Hook, R.; Jeeves, T.A. “Direct Search” Solution of Numerical and Statistical Problems. J. ACM 1961, 8, 212–229. [Google Scholar] [CrossRef]
- Shakya, A.; Mishra, M.; Maity, D.; Santarsiero, G. Structural health monitoring based on the hybrid ant colony algorithm by using Hooke–Jeeves pattern search. SN Appl. Sci. 2019, 1, 799. [Google Scholar] [CrossRef] [Green Version]
- Marinho, G.M.; Júnior, J.L.; Knupp, D.C.; Silva Neto, A.J.; Vieira Vasconcellos, J.F. Inverse problem in space fractional advection diffusion equation. Proceeding Ser. Braz. Soc. Comput. Appl. Math. 2020, 7, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Özişik, M.; Orlande, H. Inverse Heat Transfer: Fundamentals and Applications; Taylor & Francis: New York, NY, USA, 2000. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh Size | Noise | J | |||||
|---|---|---|---|---|---|---|---|
| 100 × 100 × 200 | 0% | 240.06 | 2.83 × 10−2 | 0.8046 | 5.84 × 10−1 | 2.24 | 8.72 |
| 2% | 240.71 | 2.95 × 10−1 | 0.7934 | 8.14 × 10−1 | 725.13 | 5.23 | |
| 5% | 241.49 | 6.21 × 10−1 | 0.7735 | 3.31 | 4994.21 | 14.72 | |
| 10% | 236.61 | 1.41 | 0.7798 | 2.52 | 19,424.61 | 6.44 | |
| 160 × 160 × 250 | 0% | 239.63 | 1.51 × 10−1 | 0.8054 | 6.87 × 10−1 | 1.72 | 19.17 |
| 2% | 239.11 | 3.71 × 10−1 | 0.8131 | 1.64 | 1020.84 | 11.39 | |
| 5% | 241.28 | 5.36 × 10−1 | 0.7943 | 7.03 × 10−1 | 5396.34 | 5.41 | |
| 10% | 241.76 | 7.34 × 10−1 | 0.7761 | 2.98 | 23,675.2 | 2.66 |
| Mesh Size | Noise | SP | J | |||||
|---|---|---|---|---|---|---|---|---|
| 100 × 100 × 200 | 0% | (100, 0.2) | 240.15 | 6.57 × 10−2 | 0.7993 | 8.33 × 10−2 | 0.0182 | 272 |
| (300, 0.1) | 246 | |||||||
| (450, 0.5) | 240 | |||||||
| (500, 0.9) | 299 | |||||||
| 2% | (100, 0.2) | 240.38 | 1.59 × 10−1 | 0.7971 | 3.61 × 10−1 | 724.57 | 254 | |
| (300, 0.1) | 217 | |||||||
| (450, 0.5) | 235 | |||||||
| (500, 0.9) | 270 | |||||||
| 5% | (100, 0.2) | 241.44 | 6.03 × 10−1 | 0.7757 | 3.03 | 4993.85 | 230 | |
| (300, 0.1) | 203 | |||||||
| (450, 0.5) | 257 | |||||||
| (500, 0.9) | 255 | |||||||
| 10% | (100, 0.2) | 236.86 | 1.31 | 0.7781 | 2.73 | 19,424.36 | 217 | |
| (300, 0.1) | 199 | |||||||
| (450, 0.5) | 239 | |||||||
| (500, 0.9) | 245 | |||||||
| 160 × 160 × 250 | 0% | (100, 0.2) | 240.06 | 2.51 × 10−2 | 0.7997 | 3.21 × 10−2 | 0.0036 | 265 |
| (300, 0.1) | 225 | |||||||
| (450, 0.5) | 221 | |||||||
| (500, 0.9) | 292 | |||||||
| 2% | (100, 0.2) | 239.95 | 1.98 × 10−2 | 0.8018 | 2.31 × 10−1 | 1014.21 | 257 | |
| (300, 0.1) | 231 | |||||||
| (450, 0.5) | 233 | |||||||
| (500, 0.9) | 284 | |||||||
| 5% | (100, 0.2) | 240.85 | 3.55 × 10−1 | 0.7935 | 8.11 × 10−1 | 5393.44 | 241 | |
| (300, 0.1) | 213 | |||||||
| (450, 0.5) | 243 | |||||||
| (500, 0.9) | 266 | |||||||
| 10% | (100, 0.2) | 241.44 | 6.02 × 10−1 | 0.7817 | 2.28 | 23,673.38 | 255 | |
| (300, 0.1) | 227 | |||||||
| (450, 0.5) | 273 | |||||||
| (500, 0.9) | 280 |
| Algorithm | Errors | Mesh 100 × 100 × 200 | |||
|---|---|---|---|---|---|
| 0% | 2% | 5% | 10% | ||
| ACO | Δavg[K] | 3.04 × 10−2 | 2.94 × 10−2 | 1.37 × 10−1 | 2.59 × 10−1 |
| Δmax[K] | 1.95 × 10−1 | 2.68 × 10−1 | 1.13 | 2.46 | |
| HJ | Δavg[K] | 6.28 × 10−3 | 1.36 × 10−2 | 1.24 × 10−1 | 2.59 × 10−1 |
| Δmax[K] | 1.11 × 10−1 | 1.24 × 10−1 | 1.04 | 2.42 | |
| mesh 160 × 160 × 250 | |||||
| 0% | 2% | 5% | 10% | ||
| ACO | Δavg[K] | 2.77 × 10−2 | 6.55 × 10−2 | 4.65 × 10−2 | 1.77 × 10−1 |
| Δmax[K] | 2.19 × 10−1 | 5.27 × 10−1 | 3.11 × 10−1 | 9.96 × 10−1 | |
| HJ | Δavg[K] | 2.68 × 10−3 | 1.08 × 10−2 | 3.36 × 10−2 | 8.84 × 10−2 |
| Δmax[K] | 4.72 × 10−2 | 7.43 × 10−2 | 2.53 × 10−1 | 7.55 × 10−1 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brociek, R.; Wajda, A.; Lo Sciuto, G.; Słota, D.; Capizzi, G. Computational Methods for Parameter Identification in 2D Fractional System with Riemann–Liouville Derivative. Sensors 2022, 22, 3153. https://doi.org/10.3390/s22093153
Brociek R, Wajda A, Lo Sciuto G, Słota D, Capizzi G. Computational Methods for Parameter Identification in 2D Fractional System with Riemann–Liouville Derivative. Sensors. 2022; 22(9):3153. https://doi.org/10.3390/s22093153
Chicago/Turabian StyleBrociek, Rafał, Agata Wajda, Grazia Lo Sciuto, Damian Słota, and Giacomo Capizzi. 2022. "Computational Methods for Parameter Identification in 2D Fractional System with Riemann–Liouville Derivative" Sensors 22, no. 9: 3153. https://doi.org/10.3390/s22093153
APA StyleBrociek, R., Wajda, A., Lo Sciuto, G., Słota, D., & Capizzi, G. (2022). Computational Methods for Parameter Identification in 2D Fractional System with Riemann–Liouville Derivative. Sensors, 22(9), 3153. https://doi.org/10.3390/s22093153