
Intelligent Bus Platoon Lateral and Longitudinal Control Method Based on Finite-Time Sliding Mode


Abstract
:1. Introduction
2. Construction of Intelligent Bus Platoon Model Based on Frenet Coordinate System
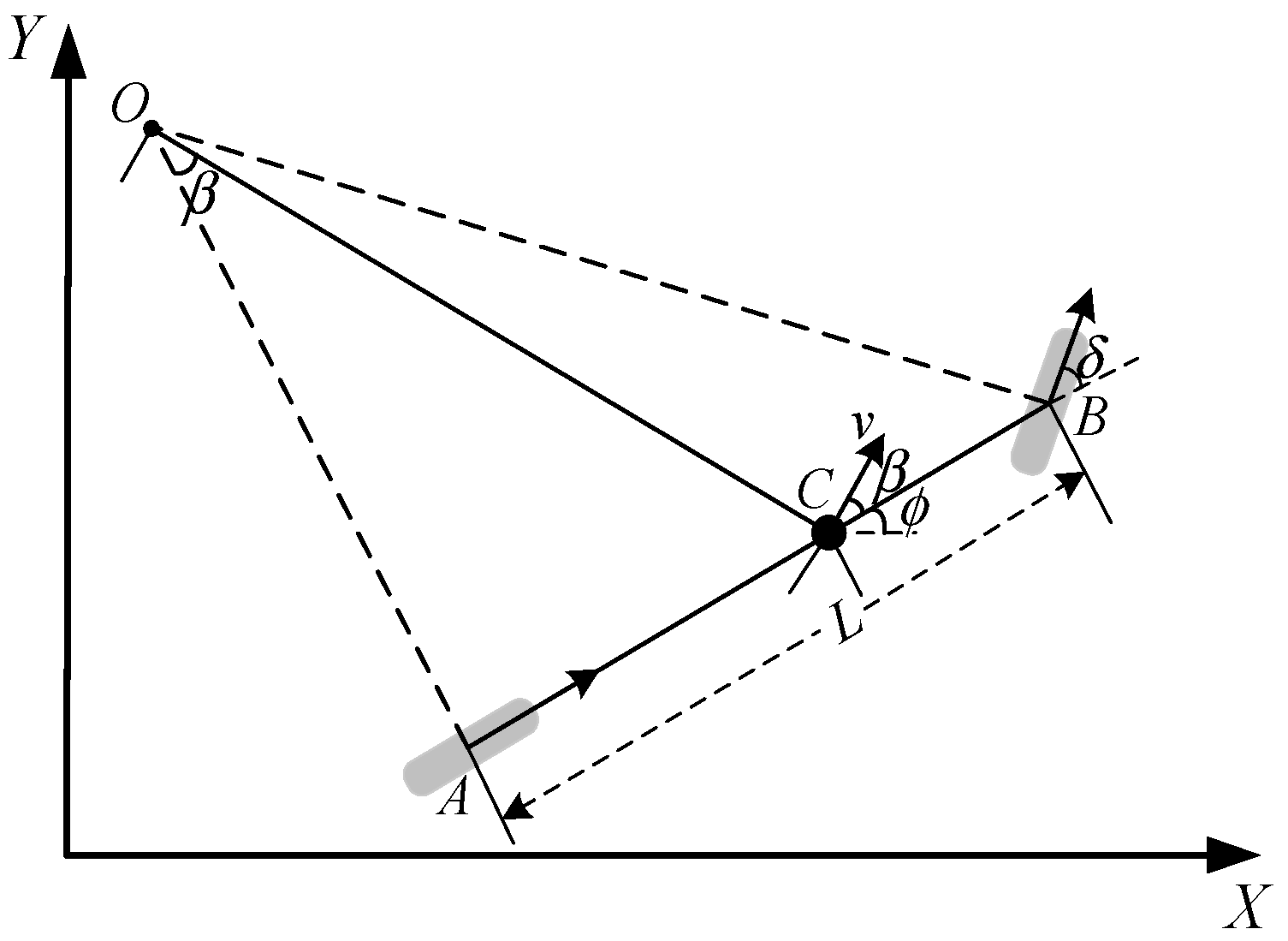
2.1. Combined Lateral and Longitudinal Kinematics Model of the Bus
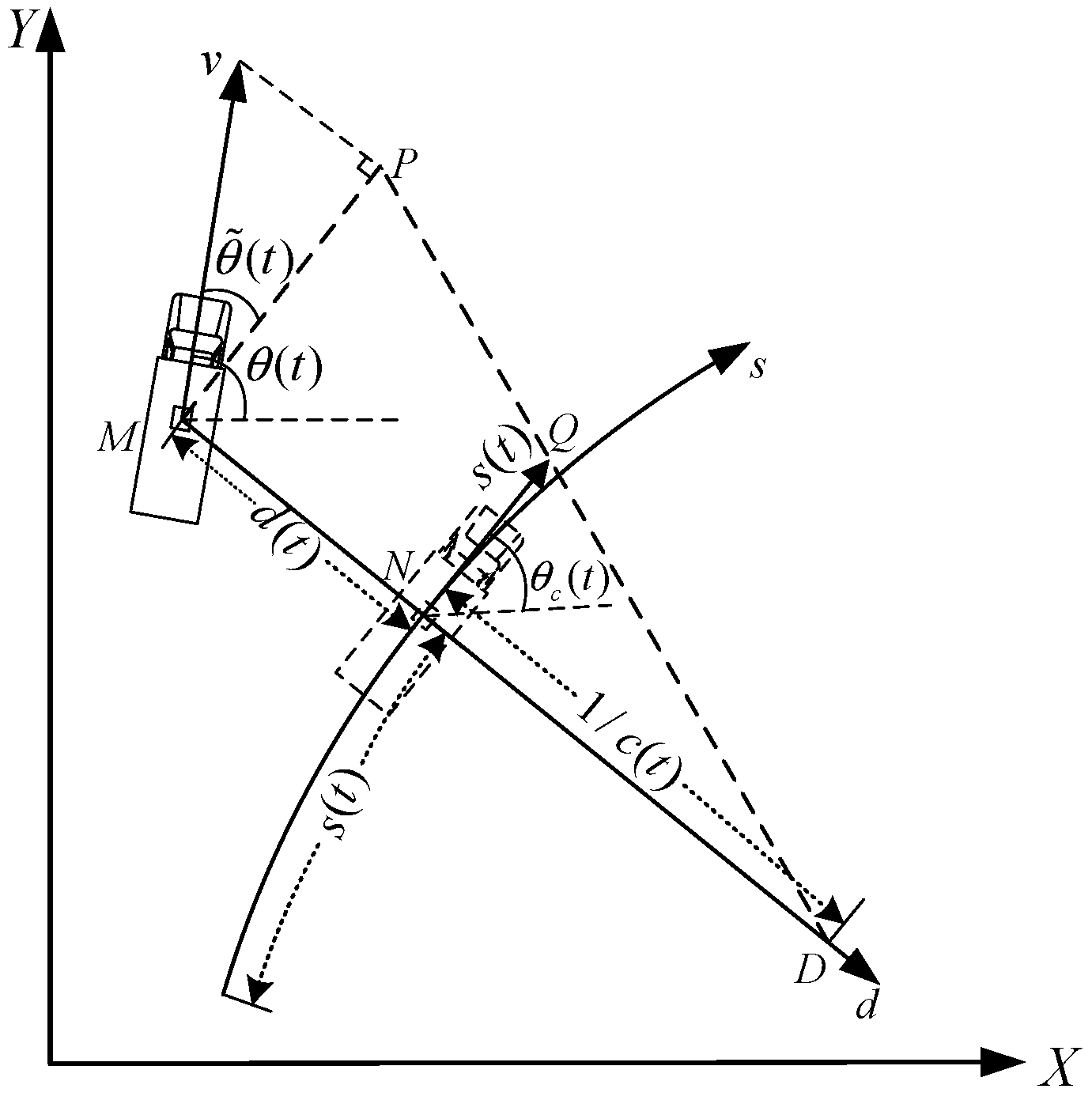
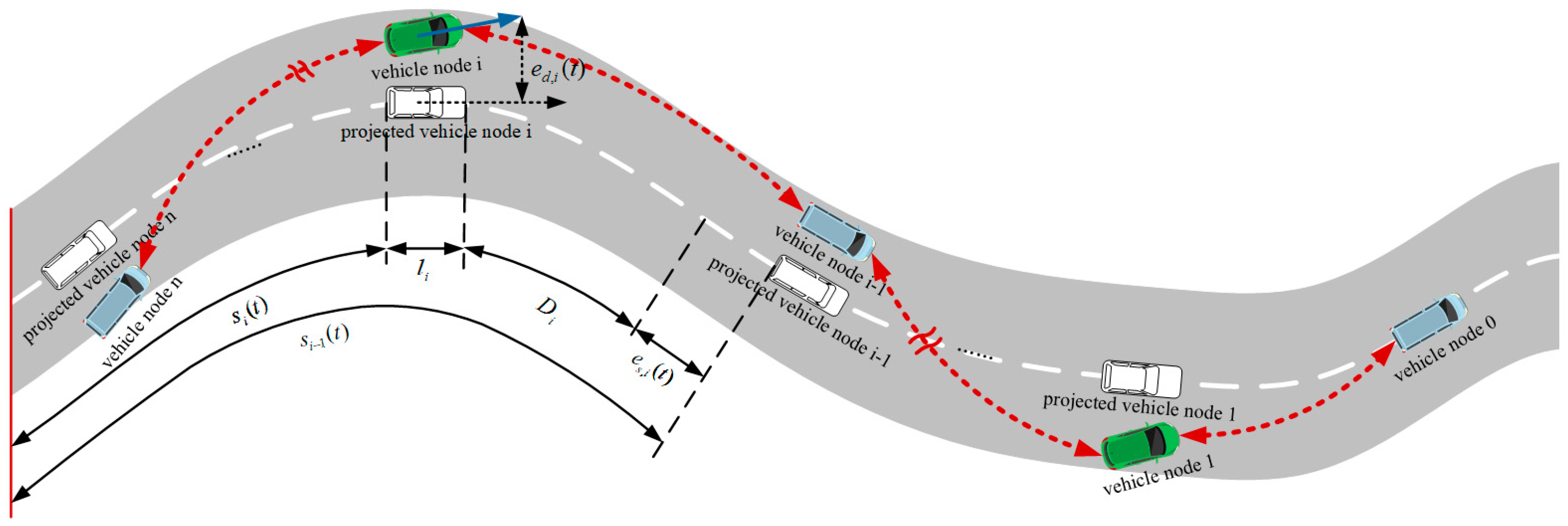
2.2. Construction of Bus Platoon Error Model in Frenet Coordinate System
3. Bus Platoon Finite-Time Sliding Mode Control Method
3.1. Control Objective
3.2. Design of Distributed Lateral and Longitudinal Tracking Controller Based on Finite-Time Sliding Mode
4. Controller Simulation Experiment and Actual Vehicle Verification
4.1. Analysis of Bus Platoon Distributed Lateral and Longitudinal Tracking Control Framework
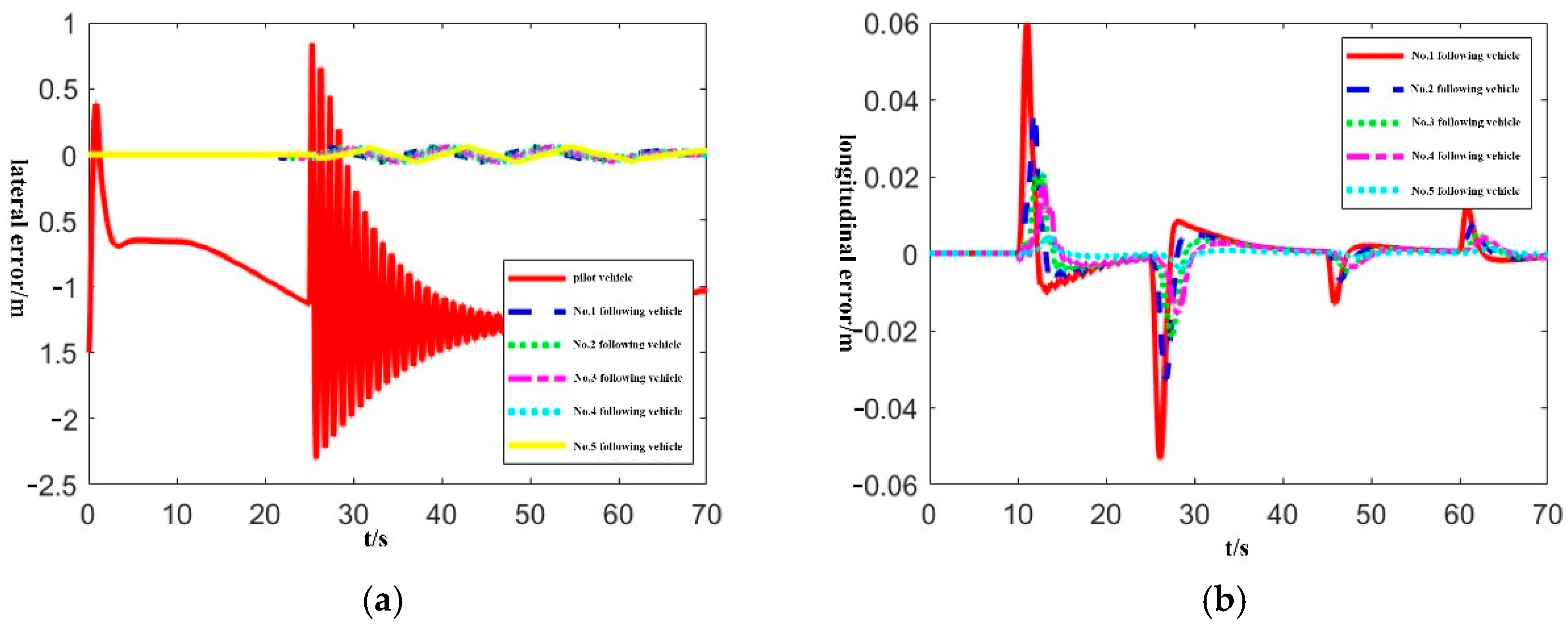
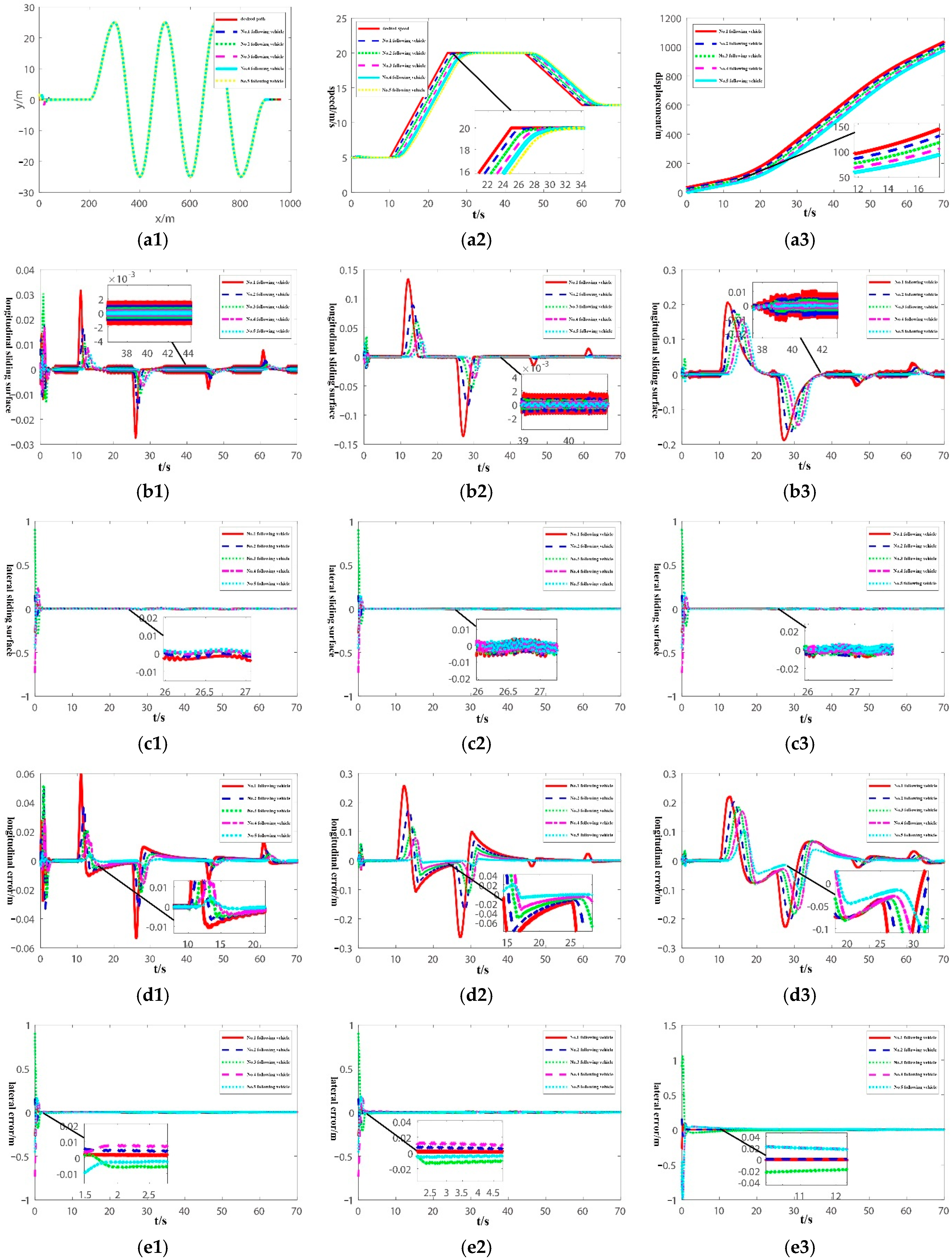
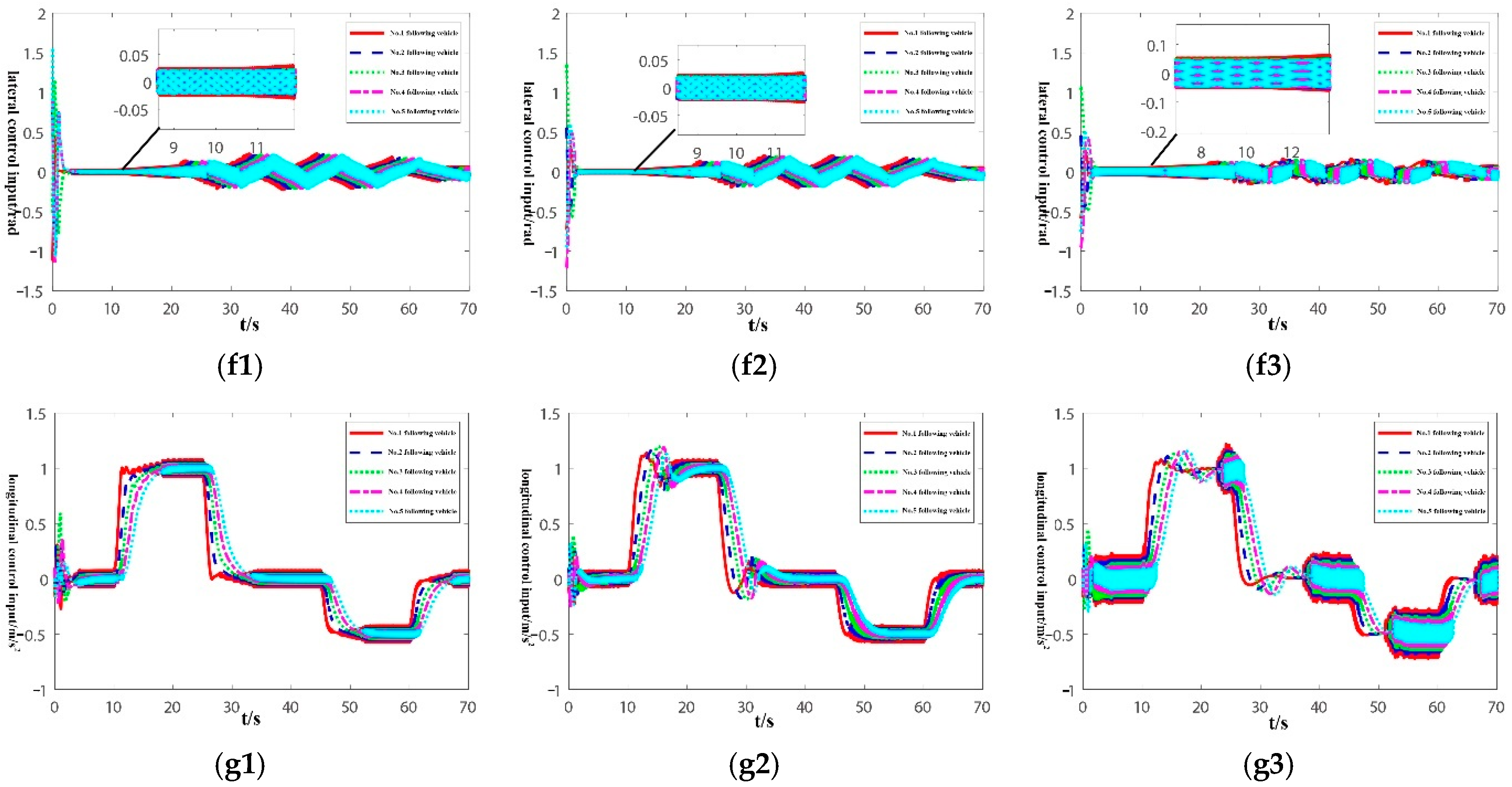
4.2. Comparison and Analysis of Controller Performance under Different Control Methods
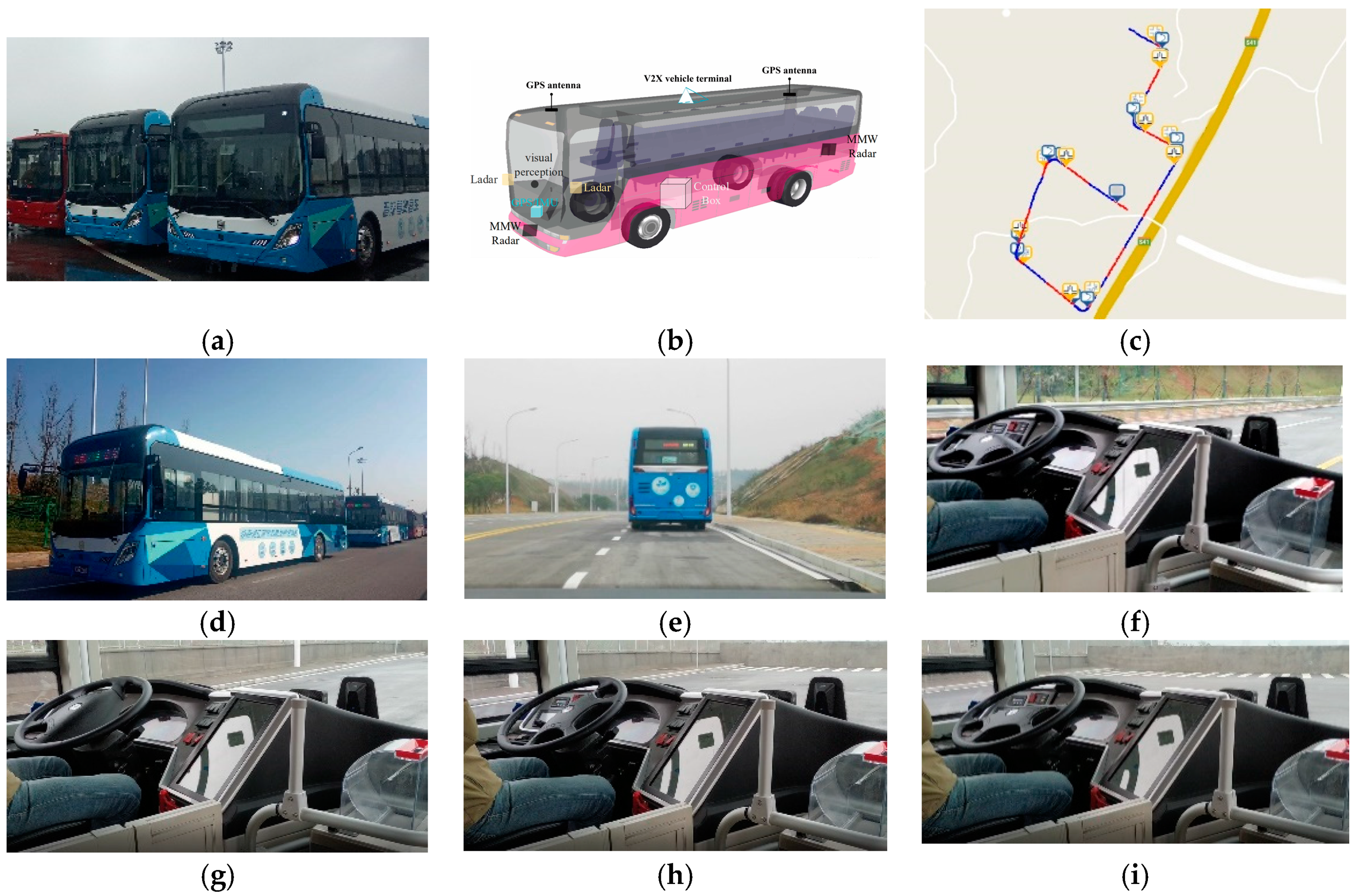
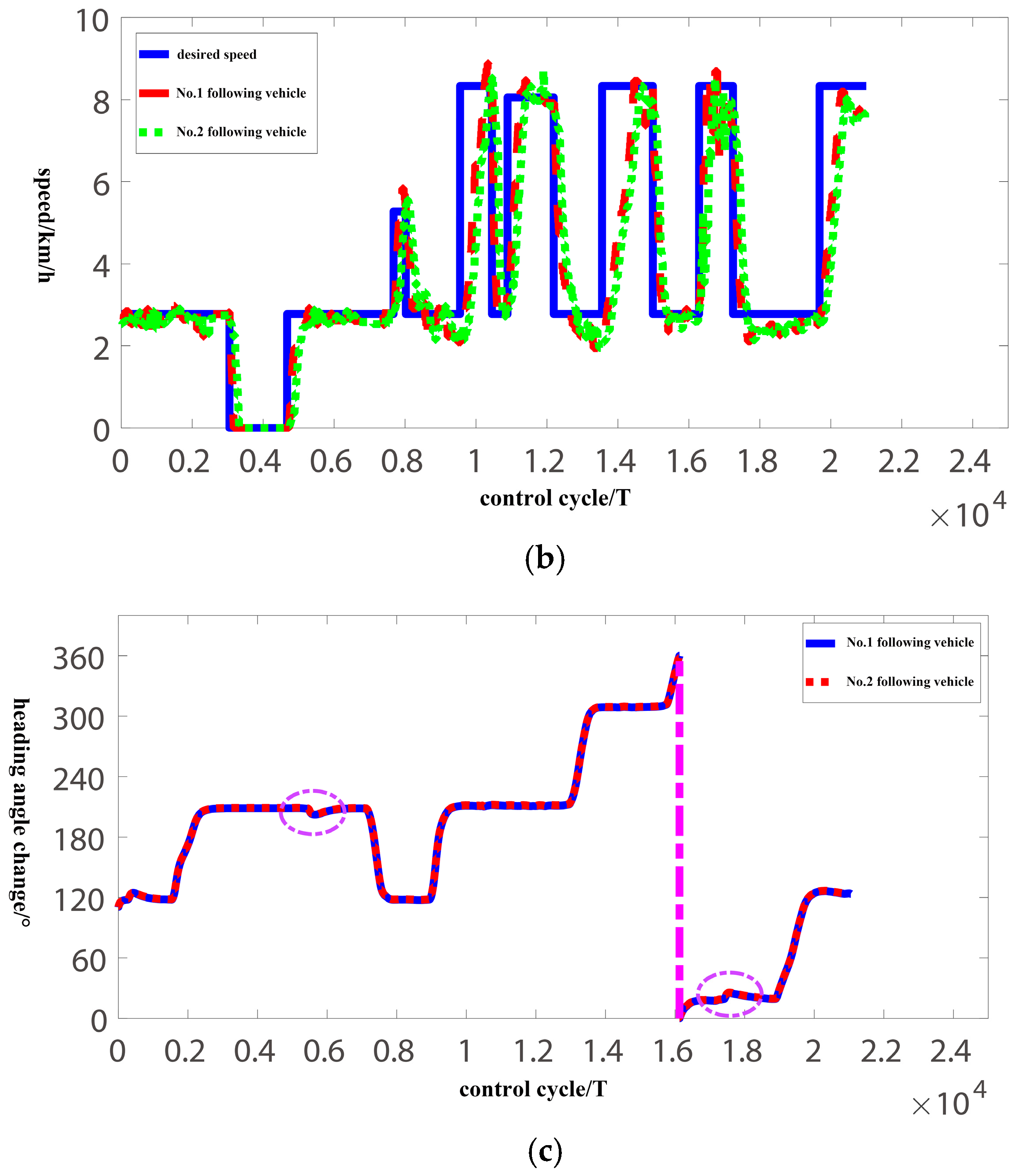
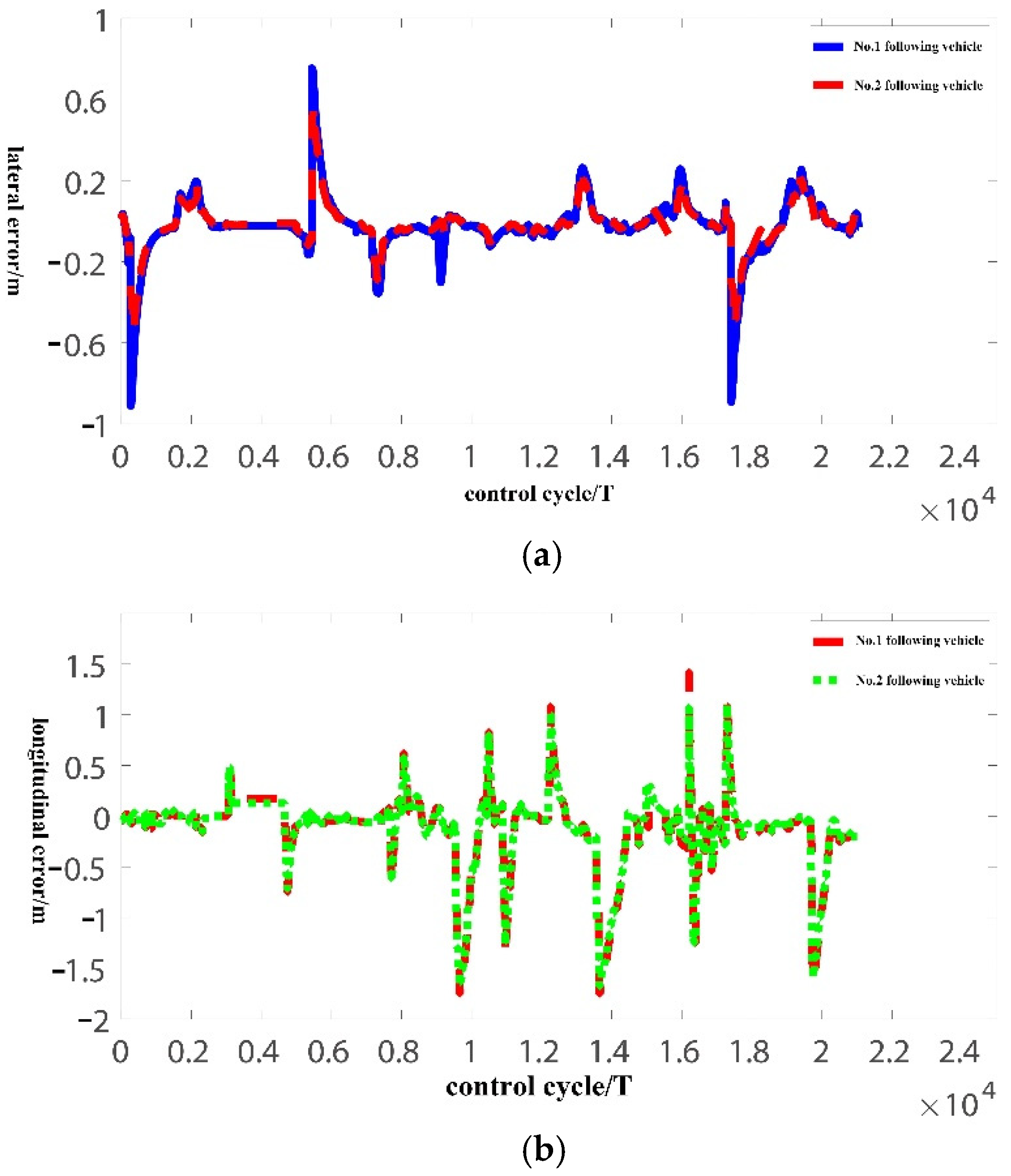
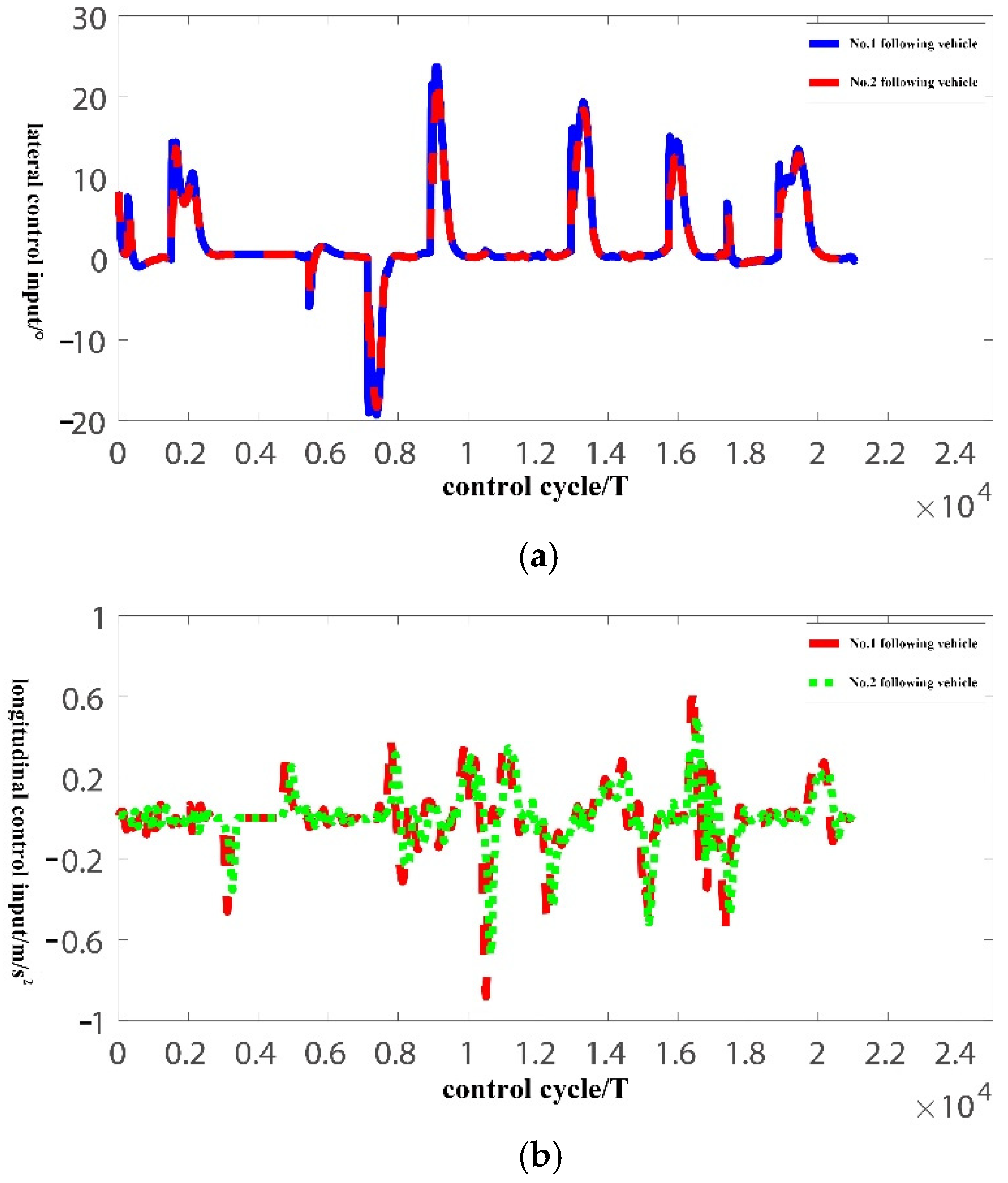
4.3. Real Vehicle Experiment of Intelligent Bus Platoon
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Yang, L.; Zhao, X.; Wu, G. A Summary of Cooperative Eco-driving Strategies for Intelligent Connected Vehicle. J. Transp. Eng. 2020, 20, 58–72. [Google Scholar]
- Guanetti, J.; Kim, Y.; Borrelli, F. Control of connected and automated vehicles, state of the art and future challenges. Annu. Rev. Control 2018, 45, 18–40. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Li, S.E.; Wang, J. Stability and Scalability of Homogeneous Vehicular Platoon: Study on the Influence of Information Flow Topologies. IEEE Trans. Intell. Transp. Syst. 2016, 17, 14–26. [Google Scholar] [CrossRef] [Green Version]
- Yu, X.; Guo, G. A General Variable Time-distance Strategy in Platoon Control. Acta Autom. Sin. 2019, 45, 1335–1343. [Google Scholar]
- Huang, J.; Ma, Y. Vehicle adaptive formation control based on following leader. J. Jilin Univ. 2019, 37, 253–259. [Google Scholar]
- Lin, Y.; Wang, P.; Zhou, Y.; Ding, F.; Wang, C.; Tan, H. Platoon Trajectories Generation: A Unidirectional Interconnected LSTM-Based Car-Following Model. IEEE Trans. Intell. Transp. Syst. 2020, 30, 17–31. [Google Scholar] [CrossRef]
- Li, Y.; Wu, C.; Zhu, H. Trajectory tracking control of connected vehicle platoon considering the effect of car-following and communication delay. Acta Autom. Sin. 2019, 37, 253–259. [Google Scholar]
- Wei, S.; Zou, Y.; Zhang, X.; Zhang, T.; Li, X. An Integrated Longitudinal and Lateral Vehicle Following Control System with Radar and Vehicle-to-Vehicle Communication. IEEE Trans. Veh. Technol. 2019, 68, 1116–1127. [Google Scholar] [CrossRef]
- Bayuwindra, A.; Ploeg, J.; Lefeber, E.; Nijmeijer, H. Combined Longitudinal and Lateral Control of Car-Like Vehicle Platooning with Extended Look-Ahead. IEEE Trans. Control Syst. Technol. 2020, 28, 790–803. [Google Scholar] [CrossRef]
- Gao, L.; Lu, L.; Chu, D. Multi-lane formation control based on graph and potential field method. Acta Autom. Sin. 2019, 46, 117–126. [Google Scholar]
- He, B.; Gao, F. Influence Analysis of Leader Information with Application to Formation Control of Multi-agent Systems. Int. J. Control Autom. Syst. 2020, 18, 3062–3072. [Google Scholar] [CrossRef]
- Li, Y.; Tang, C.; Li, K.; He, X.; Peeta, S.; Wang, Y. Consensus-Based Cooperative Control for Multi-Platoon Under the Connected Vehicles Environment. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2220–2229. [Google Scholar] [CrossRef]
- Zhao, H.; Sun, D.; Zhao, M.; Pu, Q.; Tang, C. Combined Longitudinal and Lateral Control for Heterogeneous Nodes in Mixed Vehicle Platoon Under V2I Communication. IEEE Trans. Intell. Transp. Syst. 2021, 17, 1270–1283. [Google Scholar] [CrossRef]
- Liu, Y.; Jing, Y.; Liu, X. Summary of Research on Finite Time Control of Nonlinear System. Control Theory Appl. 2016, 35, 1–12. [Google Scholar]
- Li, H.; Cai, Y. Sliding Mode Control Method Based on Double Power Reaching Law. Control Decis. 2016, 31, 498–502. [Google Scholar]
- Feng, G.; Dang, D.; He, Y. Robust Coordinated Control of Nonlinear Heterogeneous Platoon Interacted by Uncertain Topology. IEEE Trans. Intell. Transp. Syst. 2020, 99, 1–11. [Google Scholar] [CrossRef]
- Qiao, L.; Zhang, W. Adaptive non-singular integral terminal sliding mode tracking control for autonomous underwater vehicles. IET Control Theory Appl. 2017, 11, 1293–1306. [Google Scholar] [CrossRef]
- Li, S.; Li, K.; Wang, J. Non-singular and fast terminal sliding mode control method and its application in car following control. Control Theory Appl. 2010, 27, 543–550. [Google Scholar]
- Qiao, L.; Zhang, W. Trajectory Tracking Control of AUVs via Adaptive Fast Nonsingular Integral Terminal Sliding Mode Control. IEEE Trans. Ind. Inform. 2019, 16, 1248–1258. [Google Scholar] [CrossRef]
- Polack, P.; Altche, F. The Kinematic Bicycle Model: A Consistent Model for Planning Feasible Trajectories for Autonomous Vehicles? In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017. [Google Scholar]
- Wang, W.; Chen, H.; Ma, J. Intelligent Vehicle Path Tracking Based on Frenet Coordinate System and Control Delay Compensation. J. Ordnance Eng. 2019, 40, 2336–2351. [Google Scholar]
- Wang, W.; Gheneti, B.; Mateos, L.A.; Duarte, F.; Ratti, C.; Rus, D. Roboat: An Autonomous Surface Vehicle for Urban Waterways. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019. [Google Scholar]
- Ding, N.; Taheri, S. An adaptive integrated algorithm for active front steering and direct yaw moment control based on direct Lyapunov method. Veh. Syst. Dyn. 2010, 48, 1193–1213. [Google Scholar] [CrossRef]
- Zhang, Y.; Jin, J.; Huang, L. Model-free predictive current control of PMSM drives based on extended state observer using ultra local model. IEEE Trans. Ind. Electron. 2016, 68, 993–1003. [Google Scholar] [CrossRef]
- Guo, X.; Wang, J.; Liao, F. Distributed adaptive integrated-sliding-mode controller synthesis for string stability of vehicle platoons. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2419–2429. [Google Scholar] [CrossRef]
- Kahouadji, M.; Mokhtari, M.R.; Choukchou-Braham, A. Real-time attitude control of 3 DOF quadrotor UAV using modified super twisting algorithm. J. Frankl. Inst. 2016, 35, 2681–2695. [Google Scholar] [CrossRef]
- Kwon, J.; Chwa, D. Adaptive Bidirectional Platoon Control Using a Coupled Sliding Mode Control Method. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2040–2048. [Google Scholar] [CrossRef]
- Levant, A. Chattering Analysis. IEEE Trans. Autom. Control 2010, 55, 1380–1389. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Unit |
|---|---|---|
| 4456 | kg | |
| 10 | ||
| 5 | ||
| 23.1 | - | |
| 6.8 | ||
| 0.96 | - | |
| 0.52 |
| Parameters | Value | Parameters | Value | Parameters | Value |
|---|---|---|---|---|---|
| 0.6 | 0.1 | ||||
| 0.1 | 5 | 9 | |||
| 7 | 3 | 1.3 | |||
| 1.8 | 0.2 | 0.1 | |||
| 3 | 5 | 9 | |||
| 5 | 1.5 | 2.2 | |||
| 0.5 | 1.5 | 0.5 | |||
| 1.5 | 1 | 1.5 |
| Performance | Distributed Lateral and Longitudinal Controller | ||
|---|---|---|---|
| Control Plan 1 (This Article) | Control Plan 2 | Control Plan 3 | |
| limited time available | Yes | Yes | Yes |
| limited time to stabilize | Yes | Yes | No |
| stable platoon | Yes | Yes | Yes |
| longitudinal convergence time | 10 s | 15 s | >15 s |
| lateral convergence time | 1.5 s | 2.5 s | 10 s |
| maximum longitudinal error | 0.06 m | 0.25 m | 0.23 m |
| maximum lateral error | 0.03 m | 0.06 m | 0.05 m |
| chattering degree | weaker | weaker | stronger |
| control input | smoother | smoother | not smooth |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, L.; Bai, Y.; Kuang, Z.; Liu, C.; Jiao, H. Intelligent Bus Platoon Lateral and Longitudinal Control Method Based on Finite-Time Sliding Mode. Sensors 2022, 22, 3139. https://doi.org/10.3390/s22093139
Yu L, Bai Y, Kuang Z, Liu C, Jiao H. Intelligent Bus Platoon Lateral and Longitudinal Control Method Based on Finite-Time Sliding Mode. Sensors. 2022; 22(9):3139. https://doi.org/10.3390/s22093139
Chicago/Turabian StyleYu, Lingli, Yu Bai, Zongxv Kuang, Chongliang Liu, and Hao Jiao. 2022. "Intelligent Bus Platoon Lateral and Longitudinal Control Method Based on Finite-Time Sliding Mode" Sensors 22, no. 9: 3139. https://doi.org/10.3390/s22093139
APA StyleYu, L., Bai, Y., Kuang, Z., Liu, C., & Jiao, H. (2022). Intelligent Bus Platoon Lateral and Longitudinal Control Method Based on Finite-Time Sliding Mode. Sensors, 22(9), 3139. https://doi.org/10.3390/s22093139