
Evaluation and Comparison of Ultrasonic and UWB Technology for Indoor Localization in an Industrial Environment

 ,
,  , , ,
, , ,  , and
, and
Abstract
:1. Introduction
1.1. Related Work and State of The Art (SOTA)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Paper | Year | System | Comparison UWB vs. US | Room Size m/ Environment | GT Points | LOS/ NLOS/ Mix | 2D Accuracy [m] Mean ± Std |
|---|---|---|---|---|---|---|---|---|
| UWB | [40] | 2014 | 802.15.4a compliant UWB System | No | 5.3 × 11.5/ Office | 5 | LOS (Static P4) | < 0.4 ± 0.04 |
| LOS (Dynamic P4) | 0.89 ± 0.08 | |||||||
| NLOS (Dynamic P4) | 0.88 ± 0.1 | |||||||
| [18] | 2016 | ATLAS | No | Laboratory | 8 | LOS | 0.21 | |
| [16] | 2017 | BeSpoon | No | 12 × 12/ Industrial Laboratory | 70 | Mix | 0.71 | |
| Ubisense | 1.10 | |||||||
| DecaWave | 0.49 | |||||||
| [7] | 2019 | Pozyx | No | Industrial Laboratory | 9 | LOS (1.5 m range) | 1.5 ± 0.03 | |
| NLOS (1.5 m range) | 1.75 ± 0.03 | |||||||
| LOS (10.9 m range) | 11.6 ± 1.7 | |||||||
| NLOS (10.9 m range) | 11.6 ± 4.4 | |||||||
| [19] | 2019 | TimeDomain PulsON440 | No | Galvanic Industry | 6 | LOS (Static) | 0.38 | |
| NLOS (Static) | 0.22 | |||||||
| [41] | 2019 | Pozyx | No | Industrial Laboratory | ROS Simulation | LOS | 0.22 | |
| NLOS | >1 | |||||||
| [42] | 2020 | DecaWave | No | Industrial Laboratory | 70 | LOS (Static) | 0.01 ± 0.01 | |
| LOS (Dynamic) | 0.21 ± 0.13 | |||||||
| Mix (Dynamic) | 0.25 ± 0.09 | |||||||
| US | [32] | 1997 | Active BAT | No | Office | - | LOS | 0.03 [11,14] |
| [5] | 1998 | Prototype | No | 0.5 × 0.4 | 55 | LOS (Static) | 0.04 ± 0.01 | |
| [15] | 2000 | MIT Cricket | No | Office | - | LOS | 0.1 [13] | |
| [10] | 2003 | DOLPHIN | No | Office | - | LOS | ||
| [43] | 2010 | LOSNUS | No | Office | 35 | LOS (Static) | 0.001 | |
| [35] | 2011 | Prototype | No | 1.2 × 1.8 m | 20 | LOS (Static) | 0.03 | |
| [36] | 2016 | Prototype | No | Laboratory | 1 | LOS (Static) | 0.02 | |
| [37] | 2017 | Prototype | No | Laboratory | - | LOS (Dynamic) | 0.012 | |
| [38] | 2019 | Decawave TREK1000 (UWB) Locate-US (US) | Yes | 24 × 14/ Industrial Laboratory | 5 | Mix (Static) | <0.2 (UWB & US) | |
| Mix (Dynamic- robot) | <0.2 (US) <0.12 (UWB) | |||||||
| Mix (Dynamic- moving person) | <0.65 (US) >0.5 (UWB) |
1.2. Our Contribution
- Comparison under the harsh conditions of an industrial environment between systems based on US and UWB;
- Large study on 100 ground-truth points and an uncontrolled environment;
- Measurements and analysis for both LoS and NLoS conditions;
- The involved methodology, including both static and dynamic cases inspired by industry: static localization for pallets and production modules, dynamic tracking of autonomous robots, forklifts, workers;
- Static measurements and analysis for different heights (0.3 m, 1 m, 2 m).
1.3. Layout
2. Materials and Methods
2.1. Localization Technologies
2.1.1. UltraSonic (US)
2.1.2. Ultra-Wideband (UWB) Radio
2.1.3. Reference System
- Static. The 2D coordinates of the ground-truth points on the floor are given by the total-station through measurements of horizontal and vertical angles and distances from all setups. The method employed is least squares. It provides a standard deviation of the measured angles of 0.001 degrees and of the measured distances of 0.002 m [45]. In order to measure all ground-truth points, the total-station needs to be set up in different locations in the laboratory to ensure LoS. Localization of beacons is performed at the point of the receiving antenna. The standard deviation of the estimated coordinates of beacons is less than 0.005 m [45]. The standard deviation of the estimated coordinates of the points on the floor is less than 0.002 m.
- Dynamic. The same reference system is used for the dynamic tests as in the static case. Positions of the object are logged with a frequency of 10 Hz. Before the dynamic test started, the position and orientation of the total-station was computed relatively to the beacons. The accuracy of the logged positions relative to the beacons is better than 0.010 m.
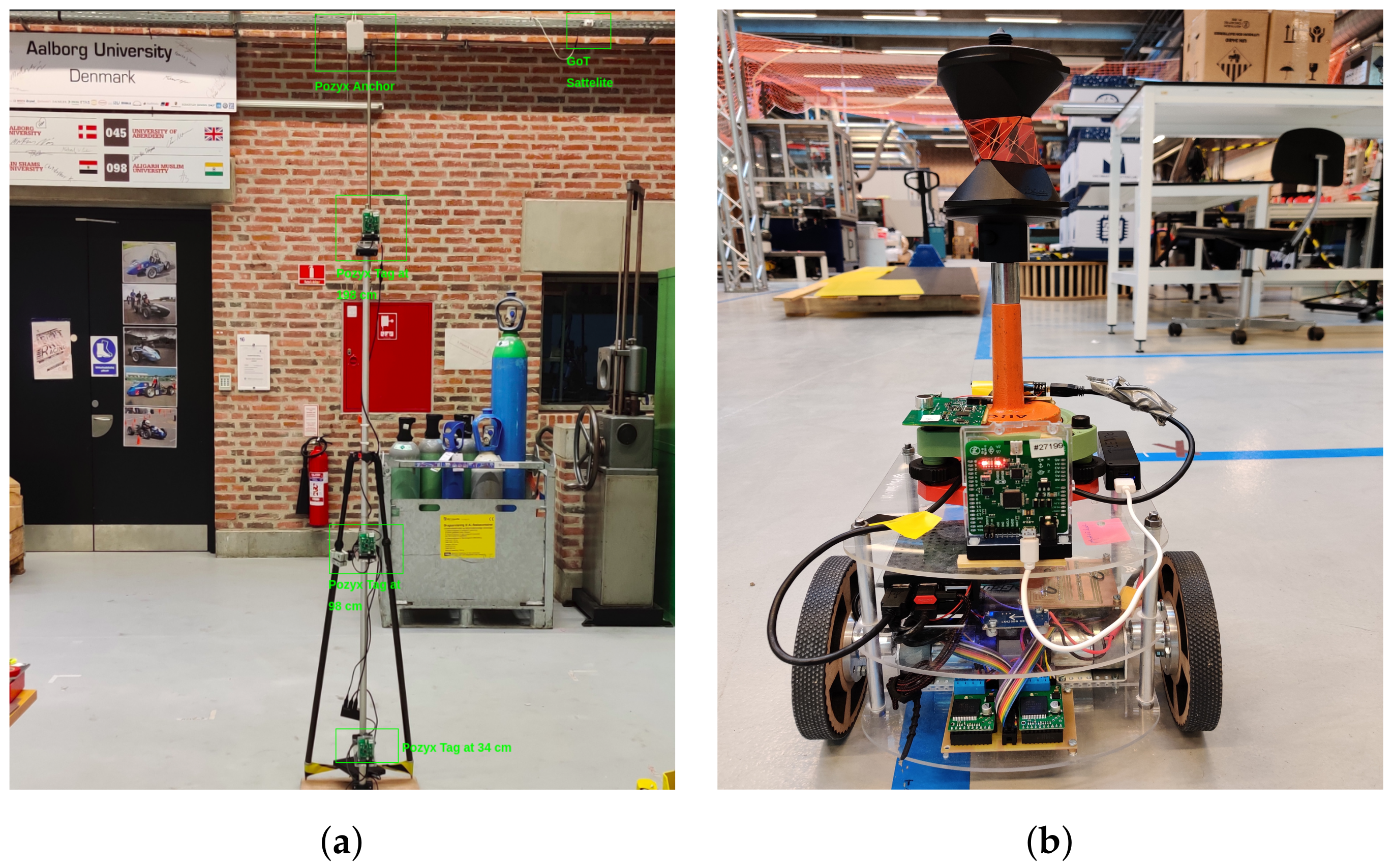
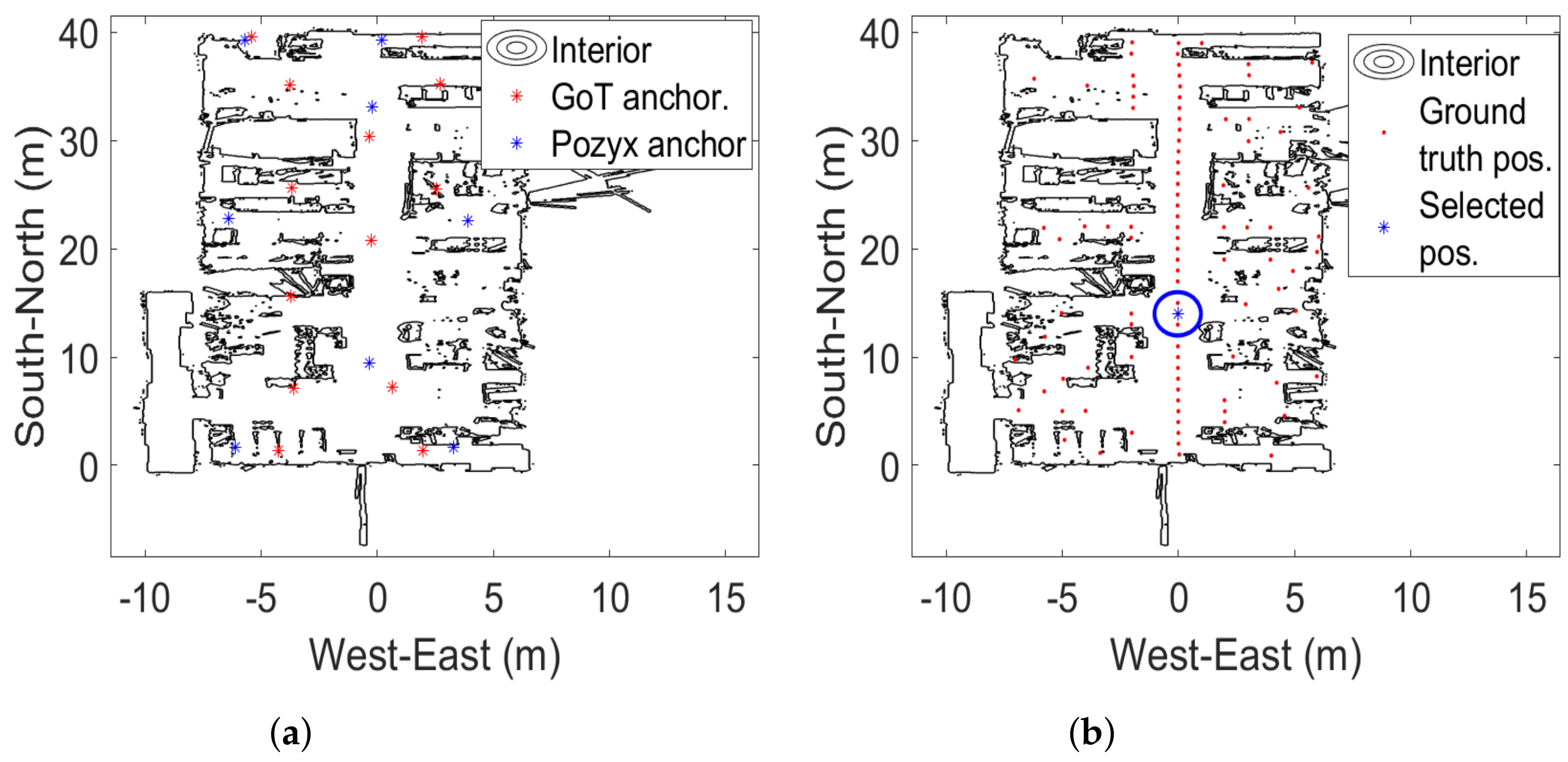
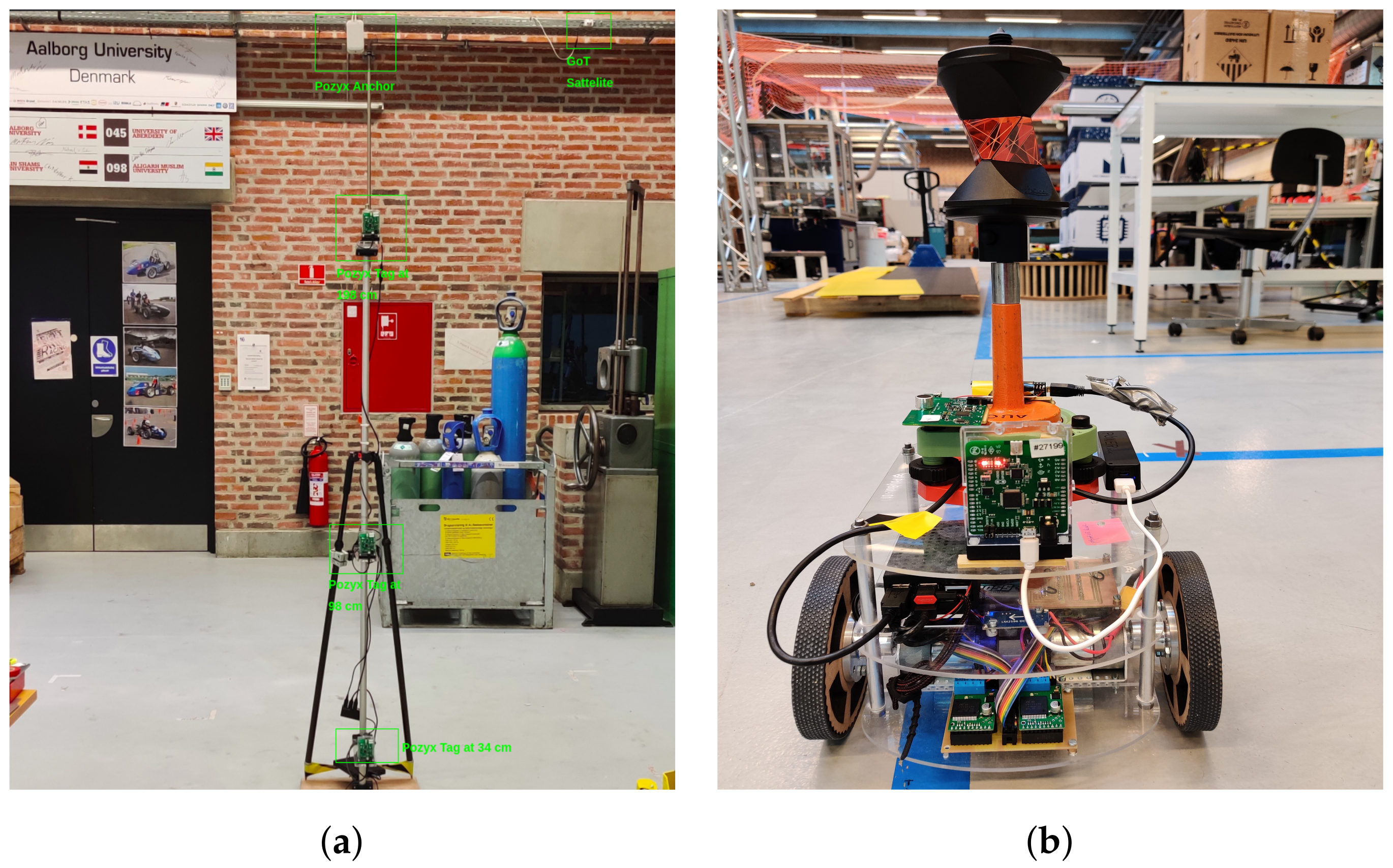
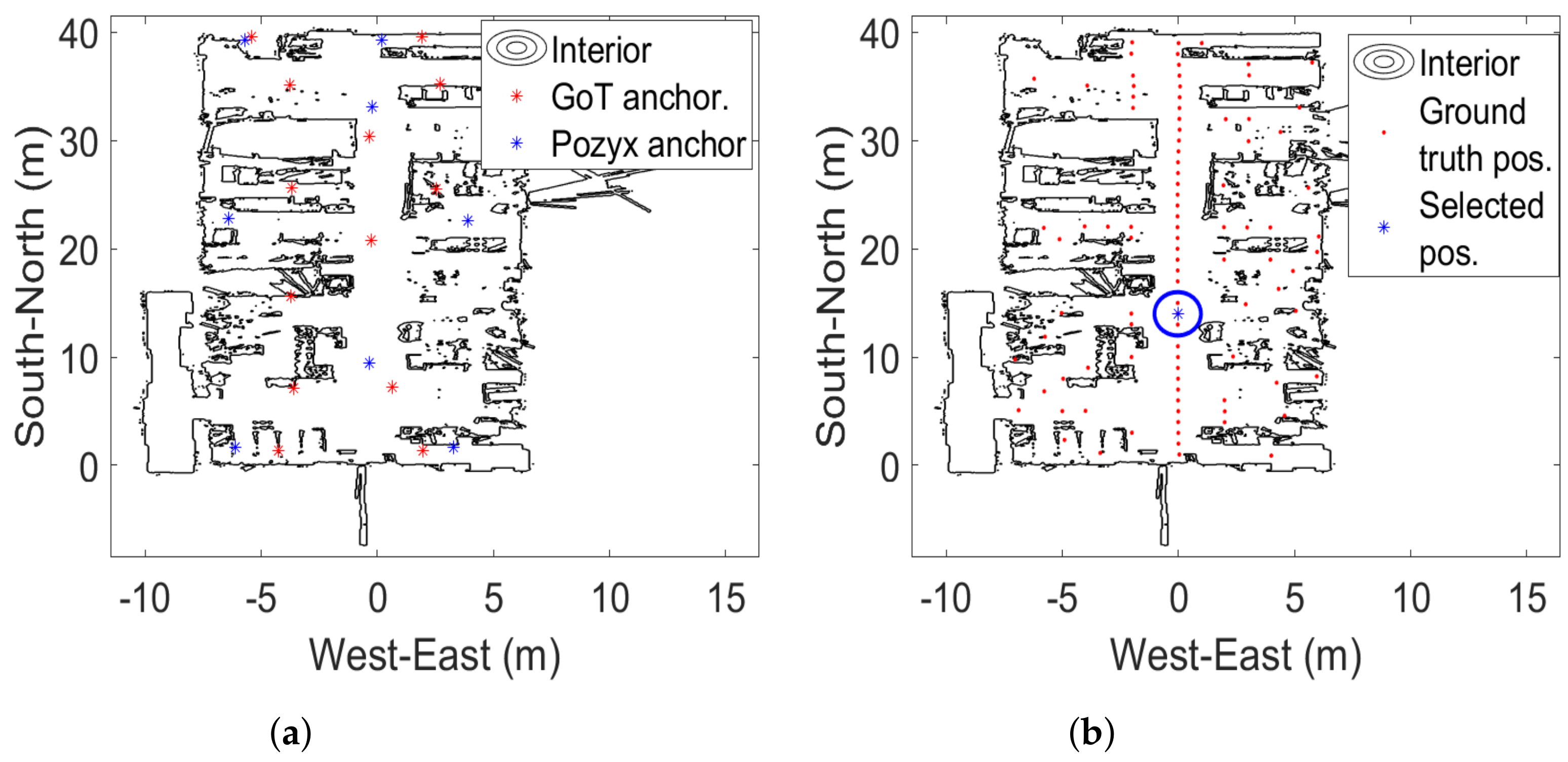
2.2. Physical Testing Facility and Beacon Placement
2.3. Methodology and Evaluation Metrics
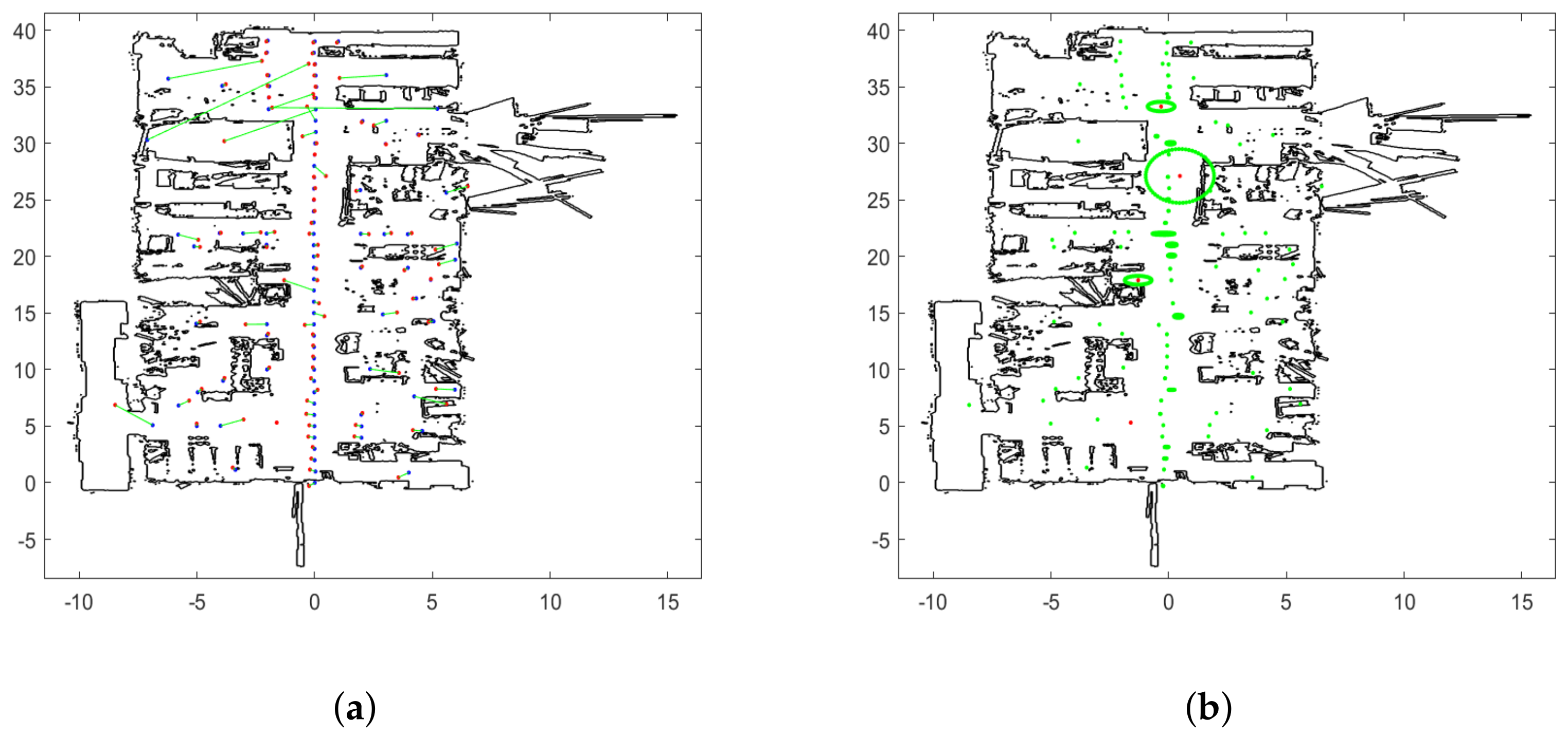
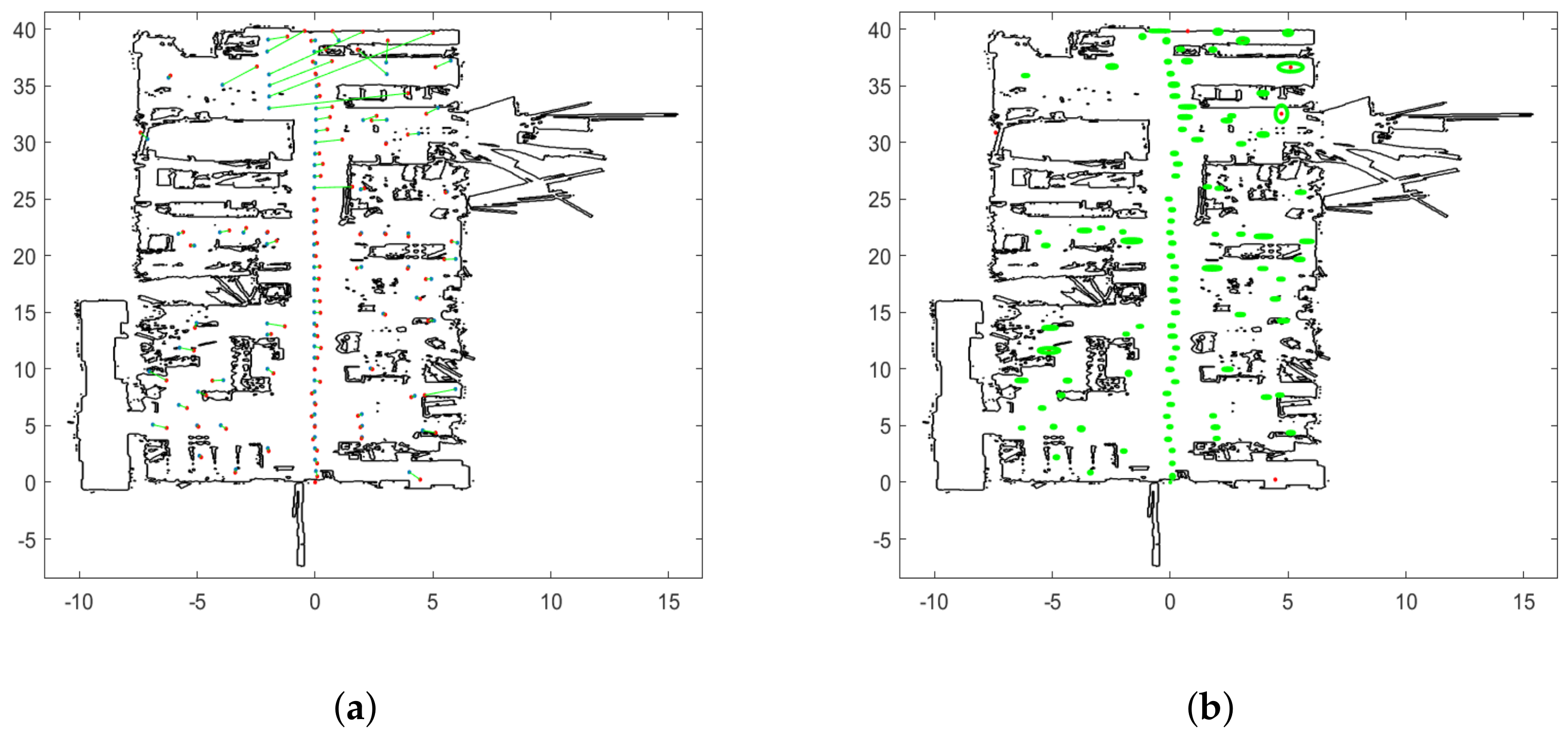
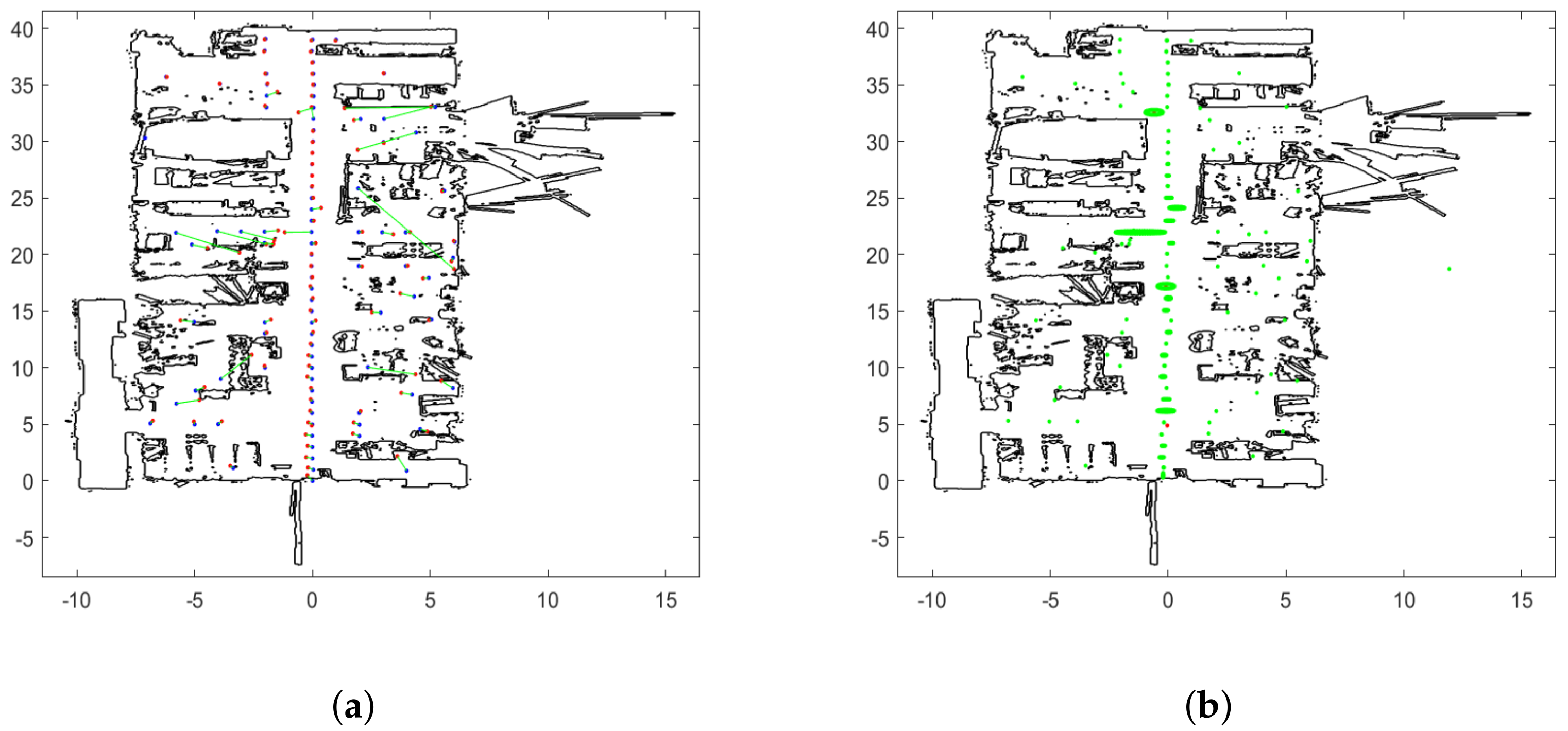
- The static part involves a tripod with 3 tags attached at 3 different heights. The lowest height of 0.3 m represents a typical height of indoor autonomous mobile robots, 1 m as the height of a production line or workers’ belt, 2 m as the height of an autonomous forklift or a worker’s helmet. Measurements of the tags are performed for 90 s for each ground-truth point presenting an aggregated result for the entire laboratory. Before the actual measurement campaign started, an extensive sensitivity analysis of the localization systems was performed in order to find the most suited system features for the AAU Smart Lab. The sensitivity analysis is summarized in Appendix A. The choice of a 90 s data acquisition period is the result of this analysis. Euclidean distances are used as evaluation metrics subject to further statistics, means and quantiles.
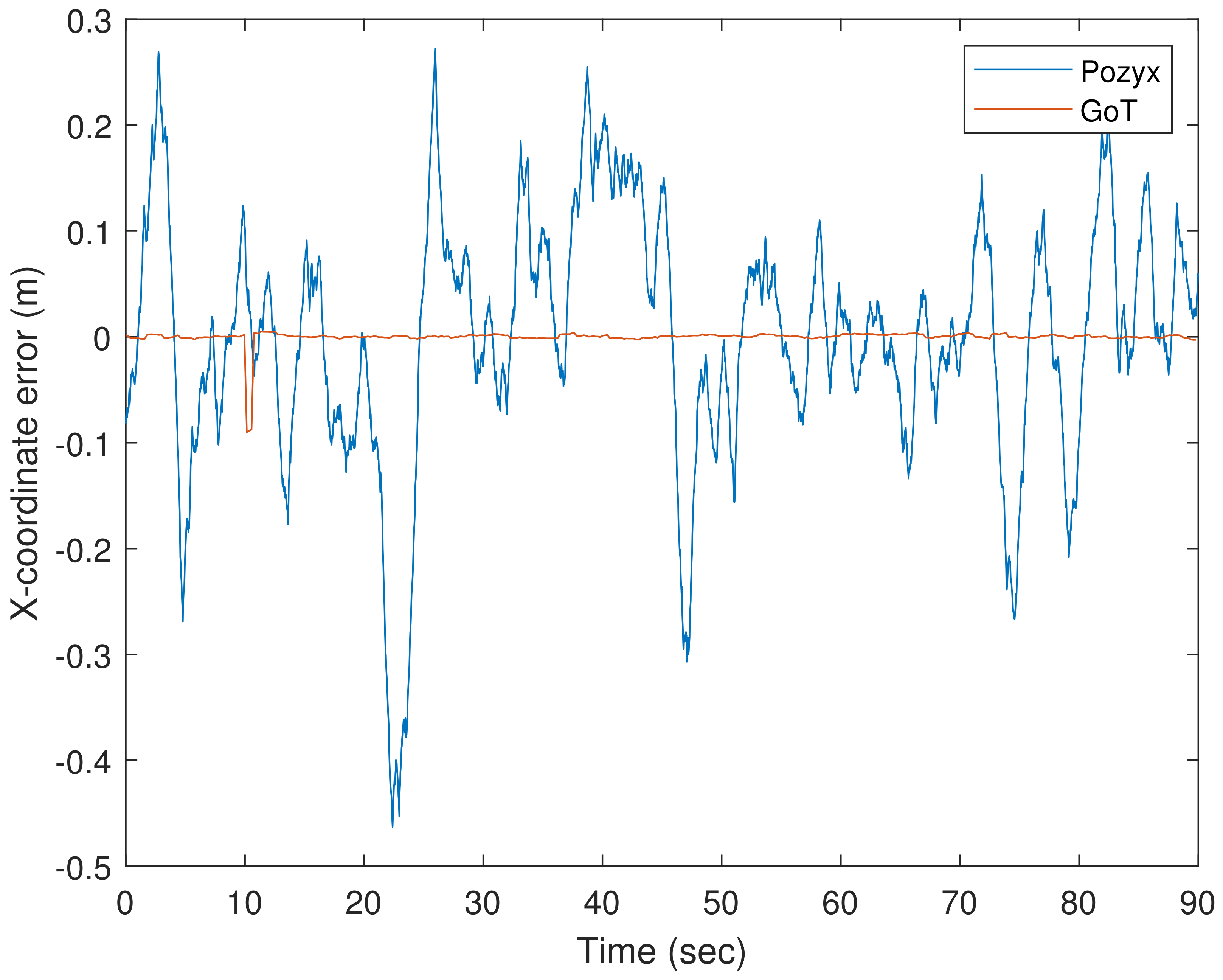
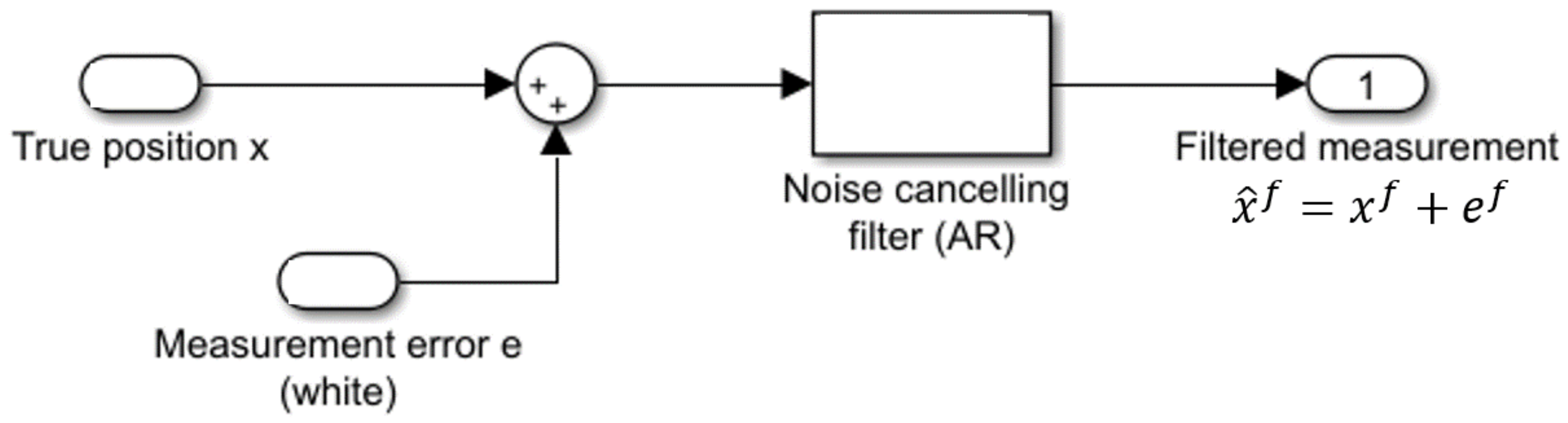
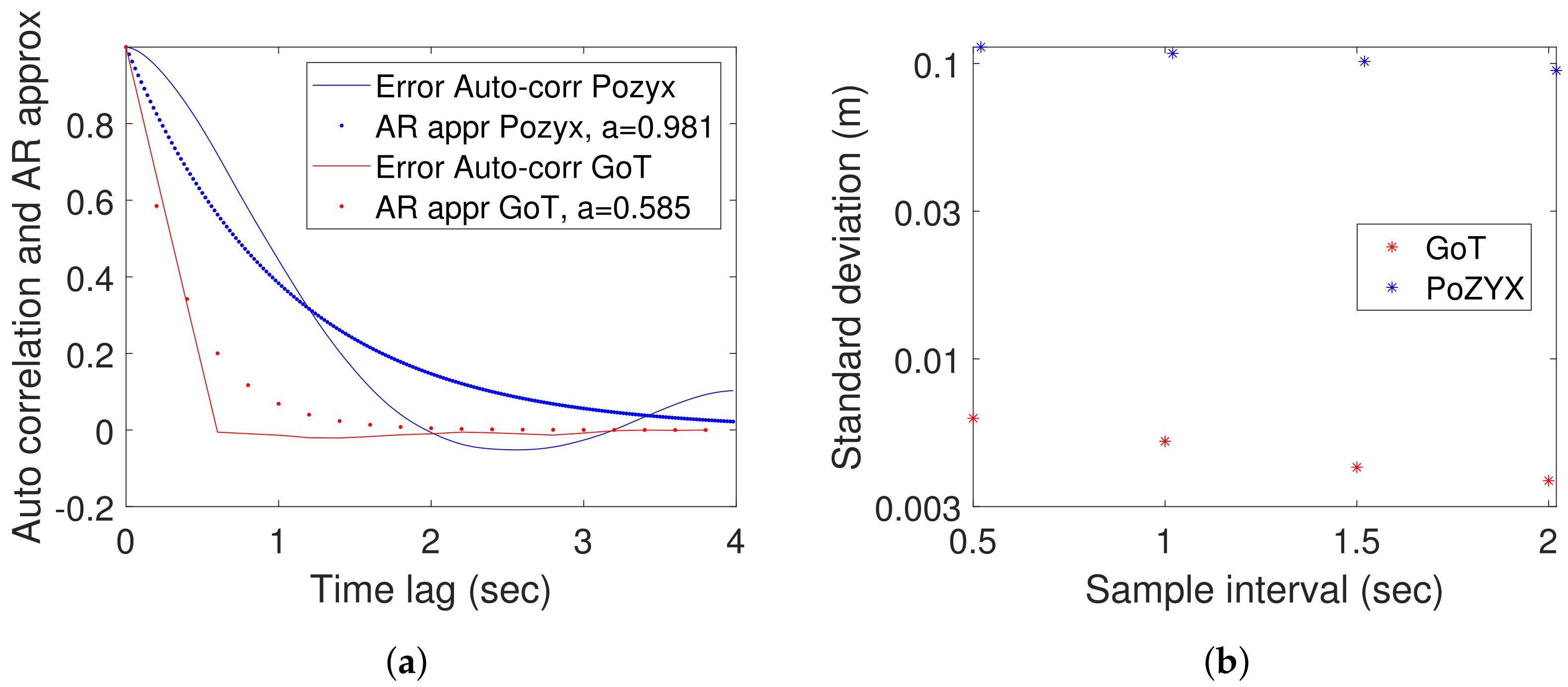
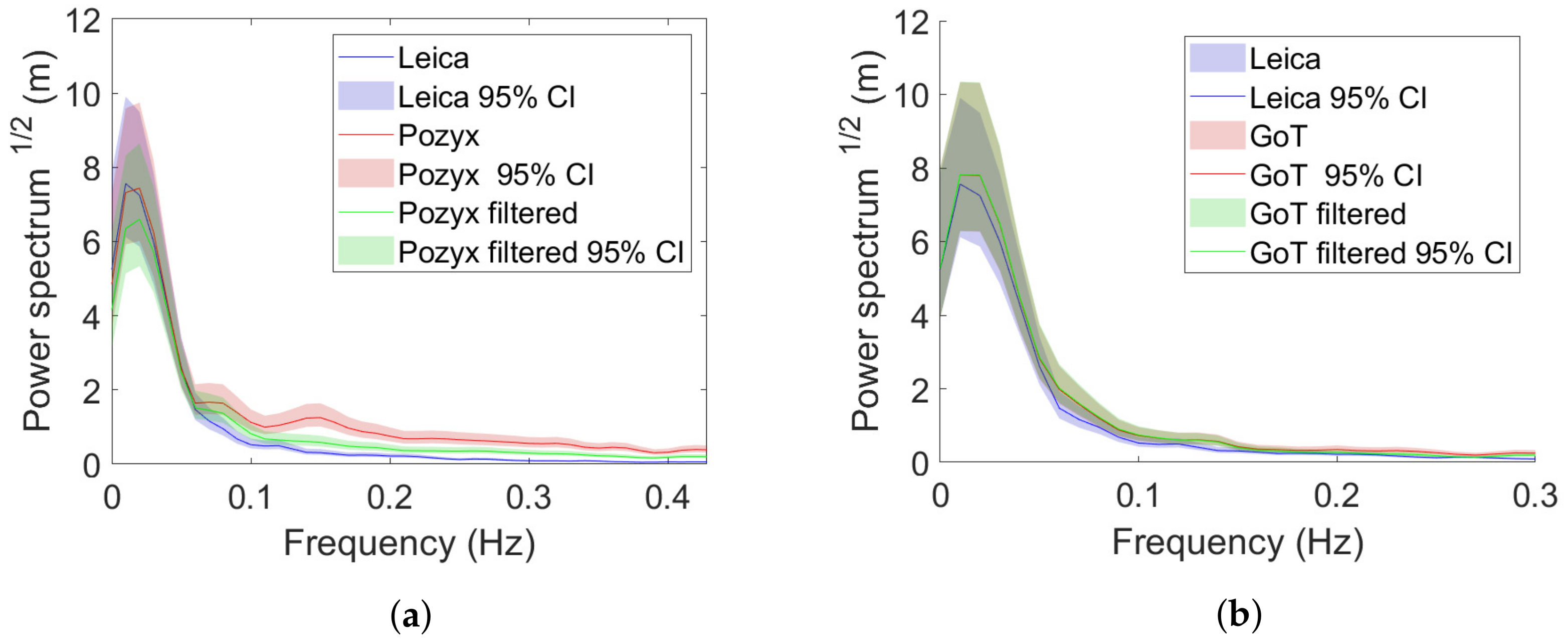
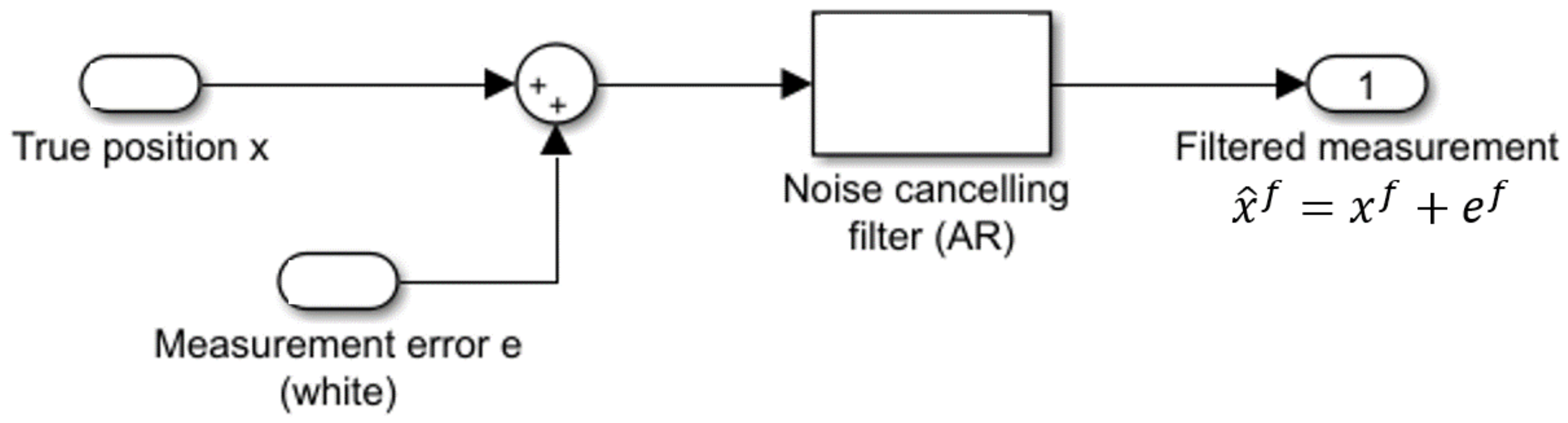
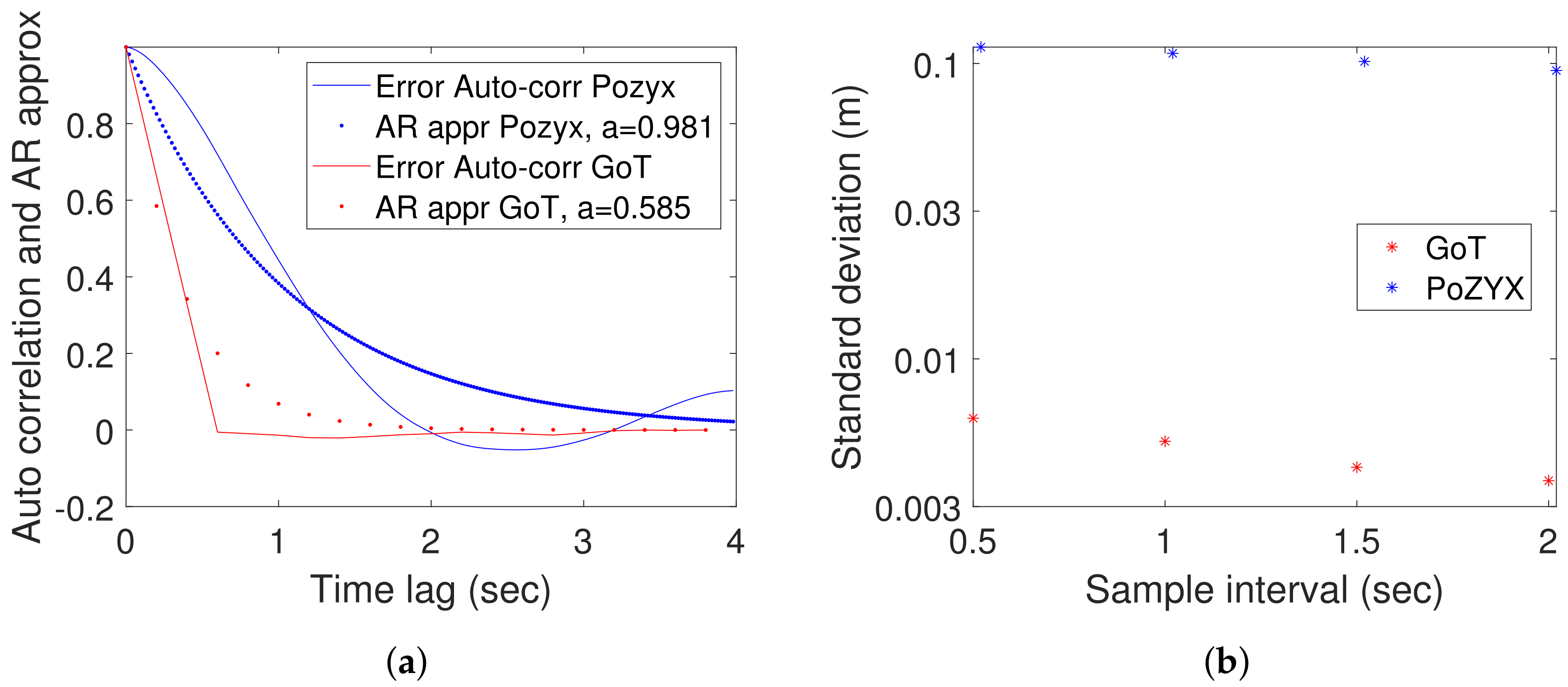
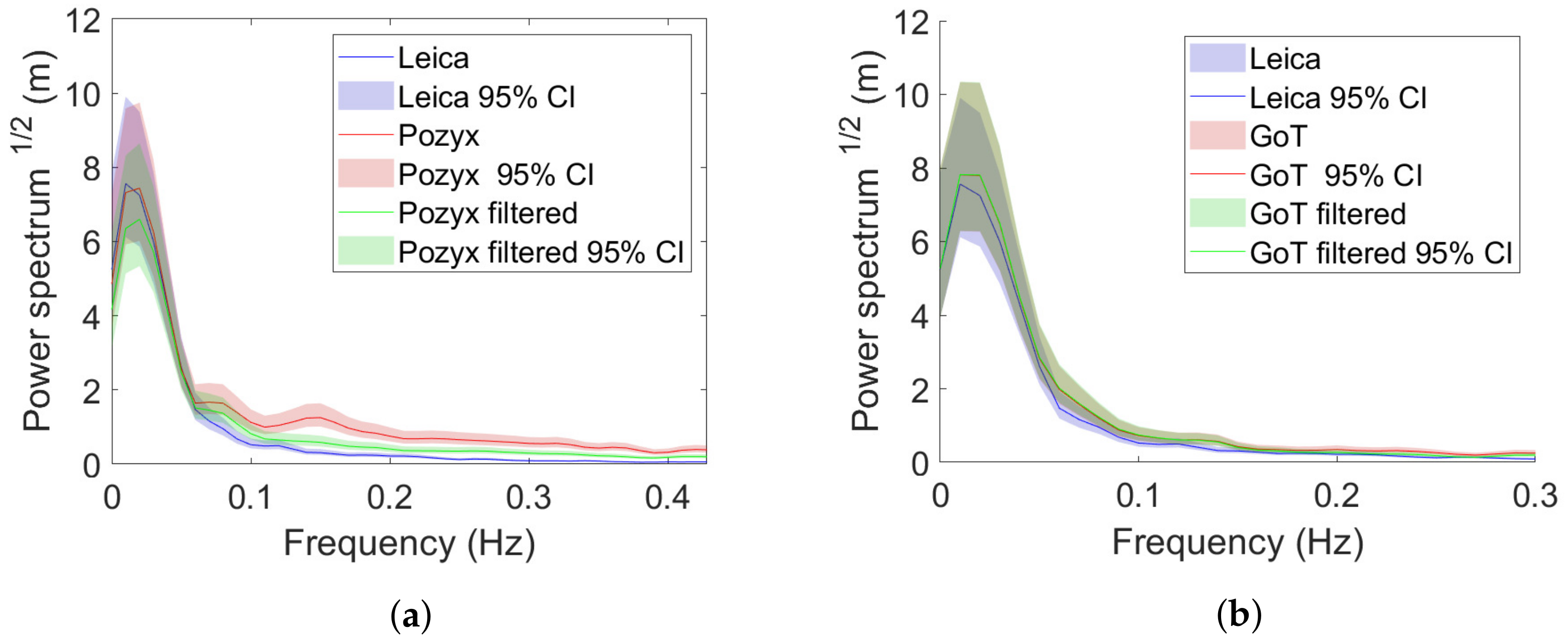
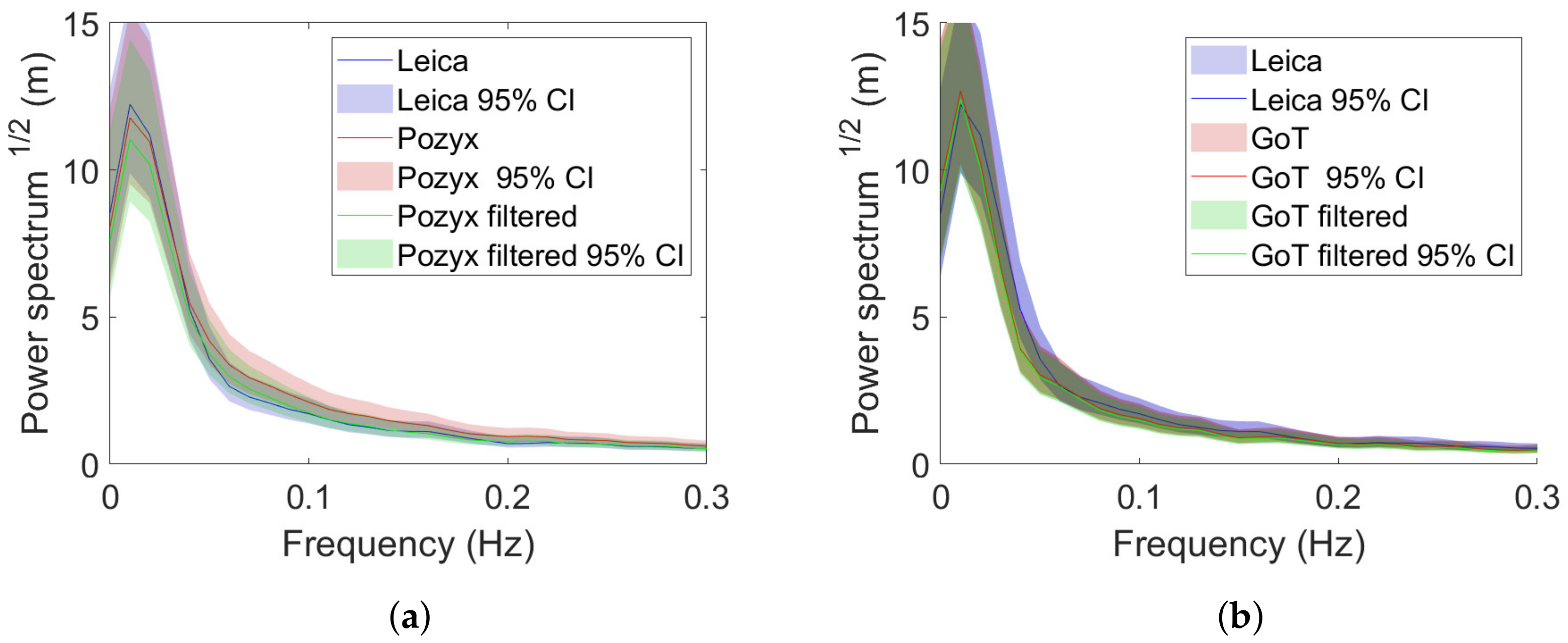
- A single ground-truth position with LoS conditions in both systems is selected for detailed static analysis. This shows, through auto-correlation analysis, that Pozyx measurements are subject to significant low-pass filtering. The detailed analysis for the selected position is used to predict and explain results for the dynamic part. Moreover, it suggests the use of inverse filtering in the dynamic part to ensure a fair comparison.
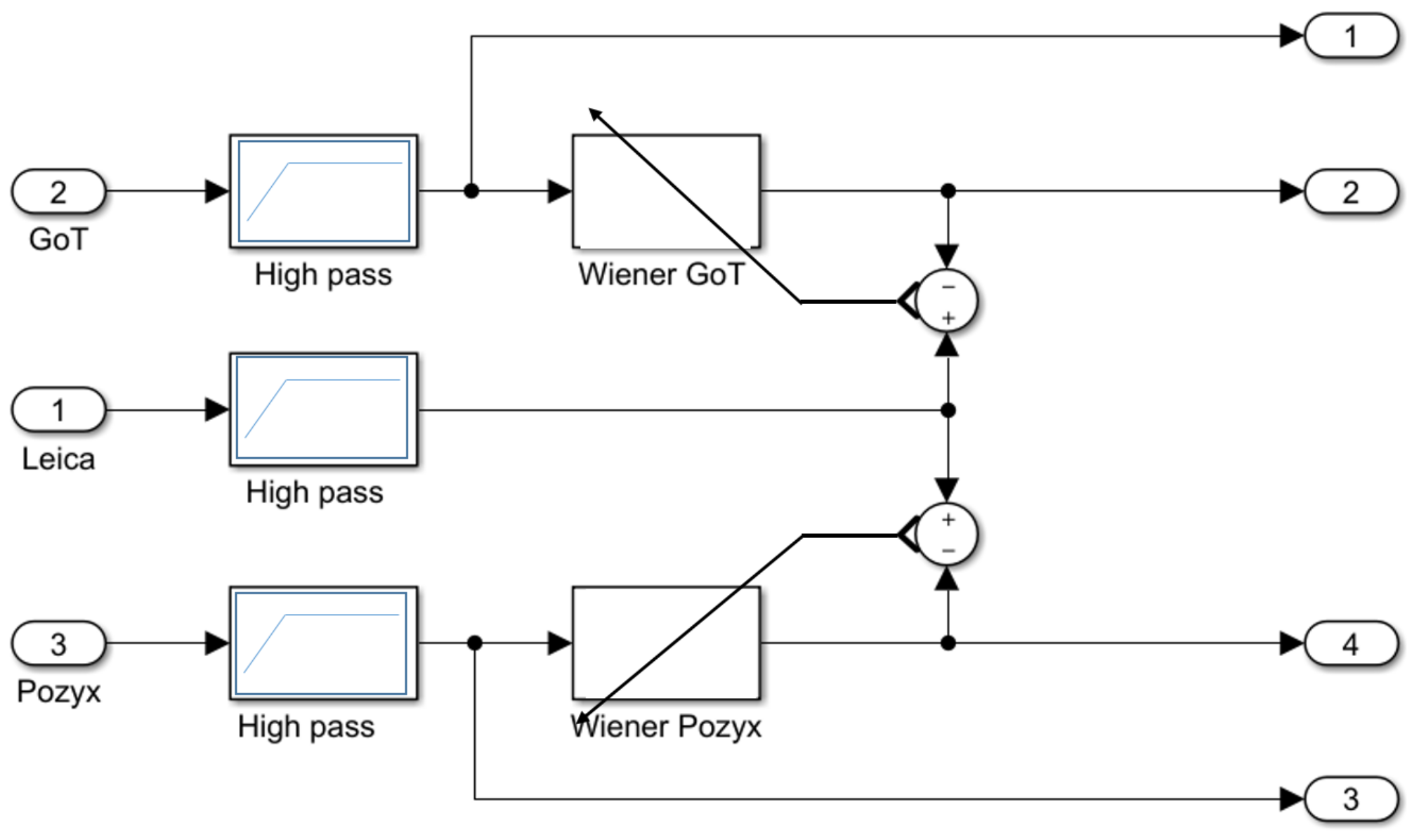
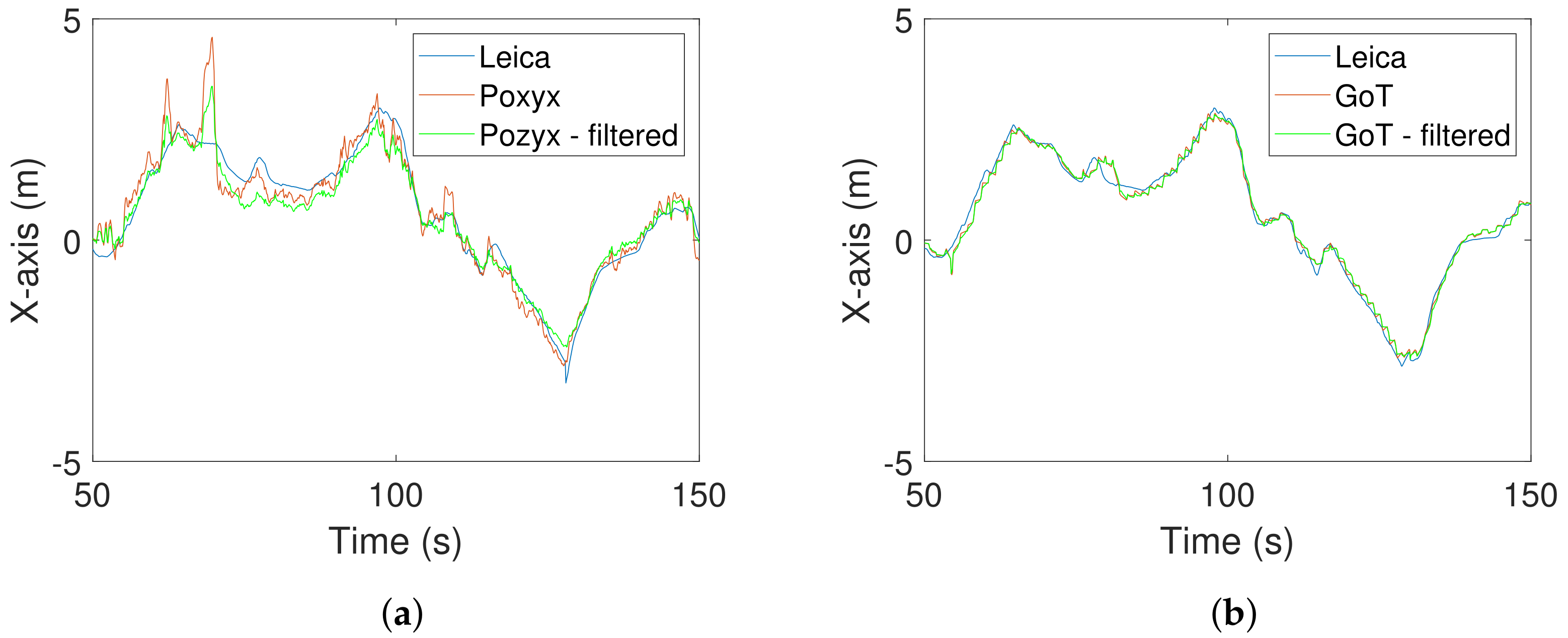
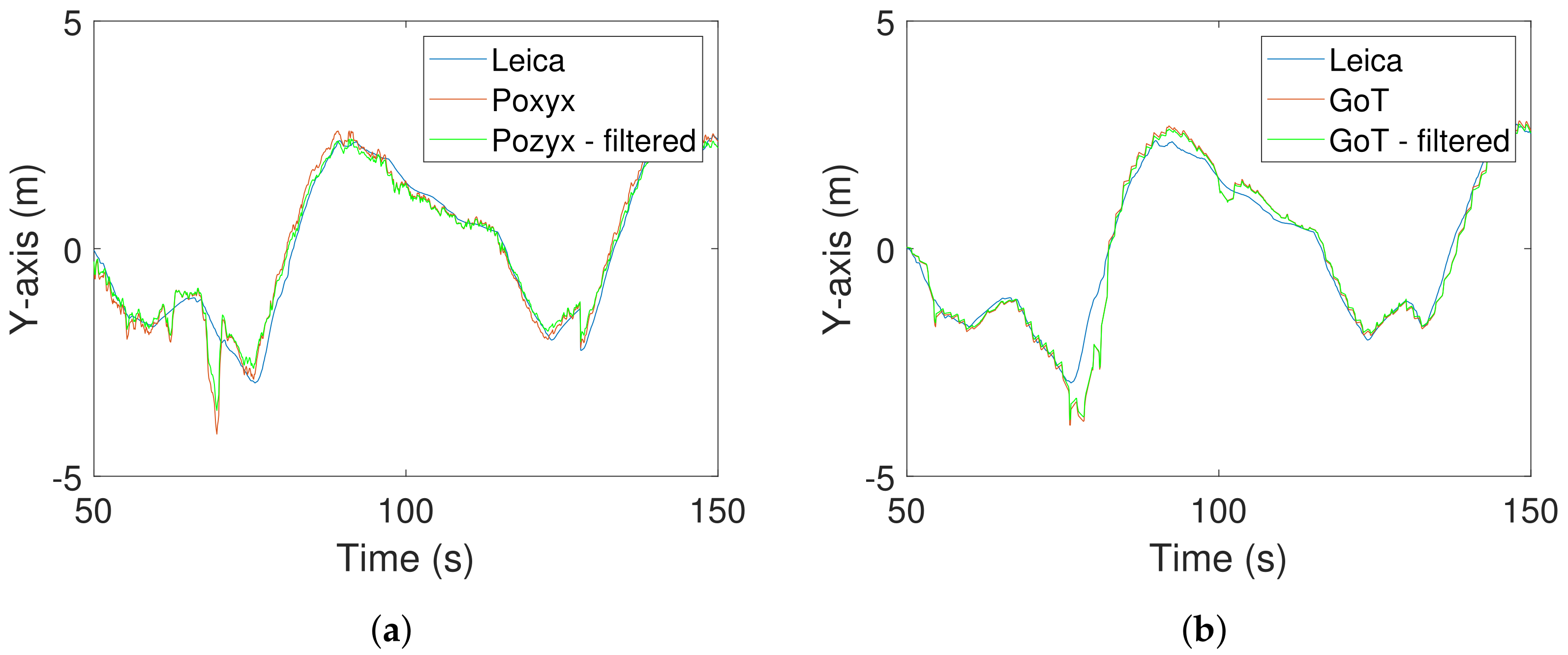
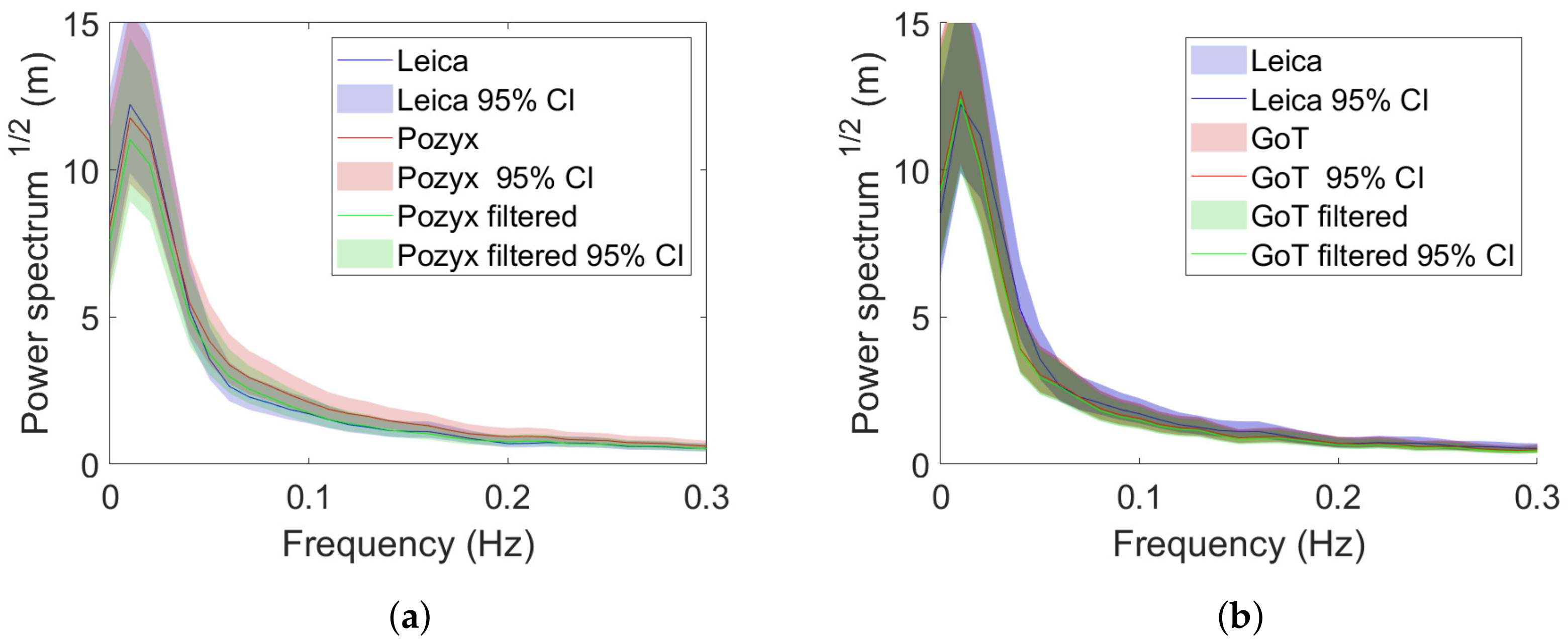
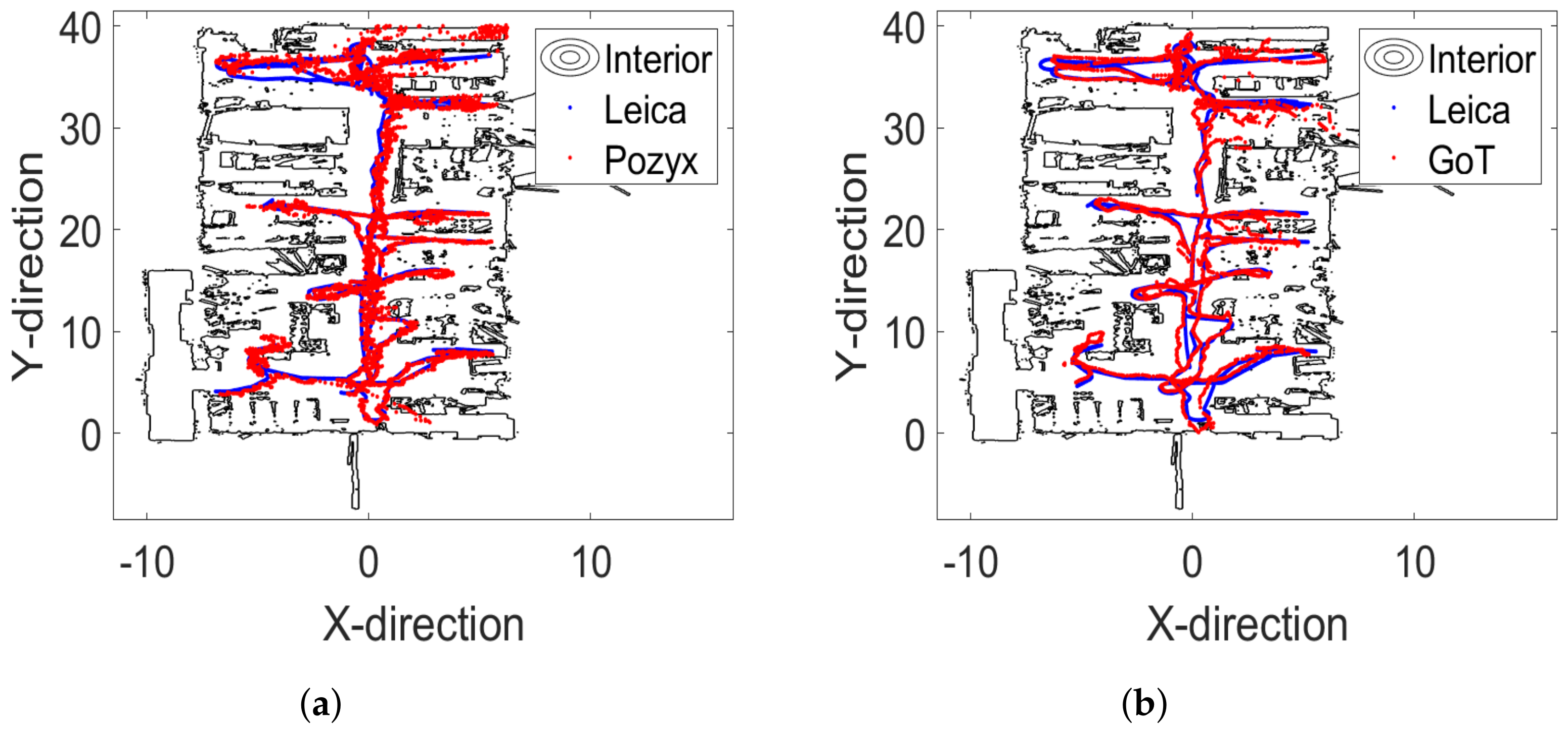
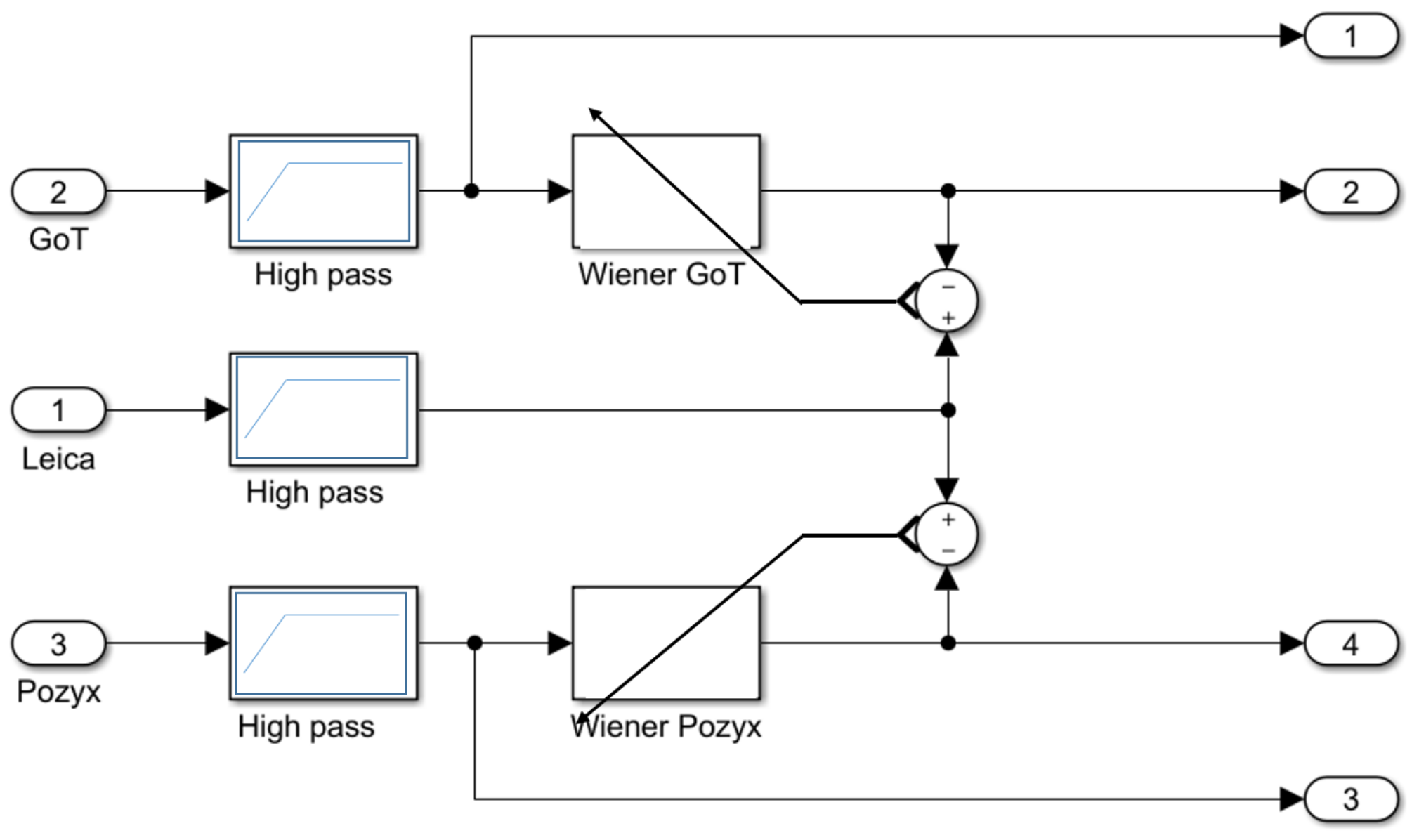
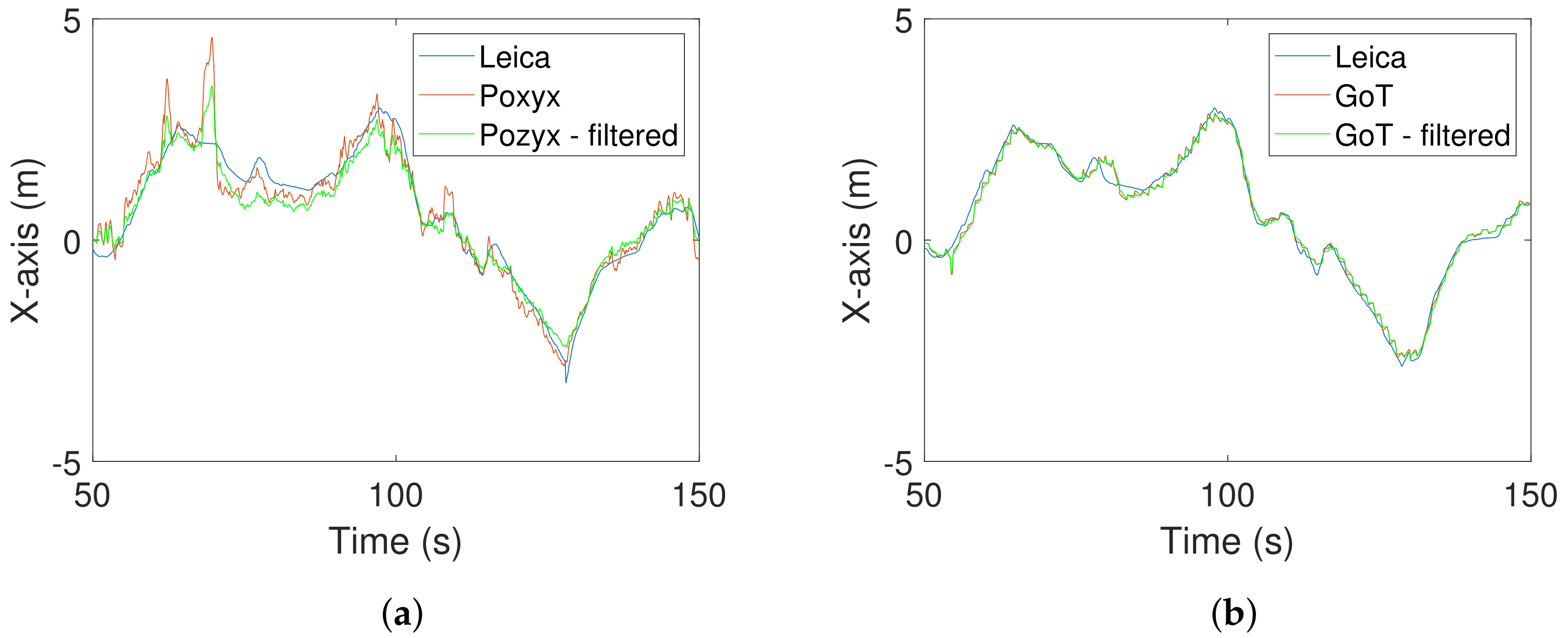
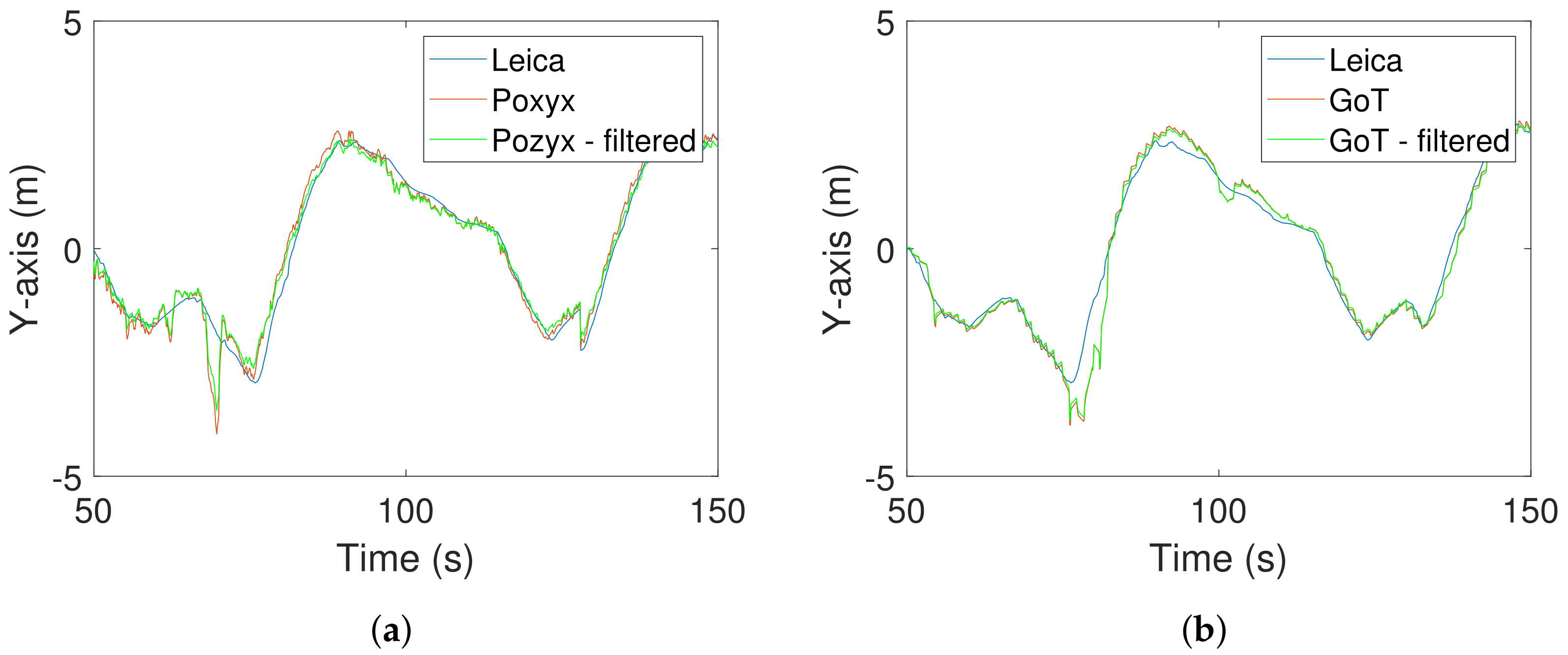
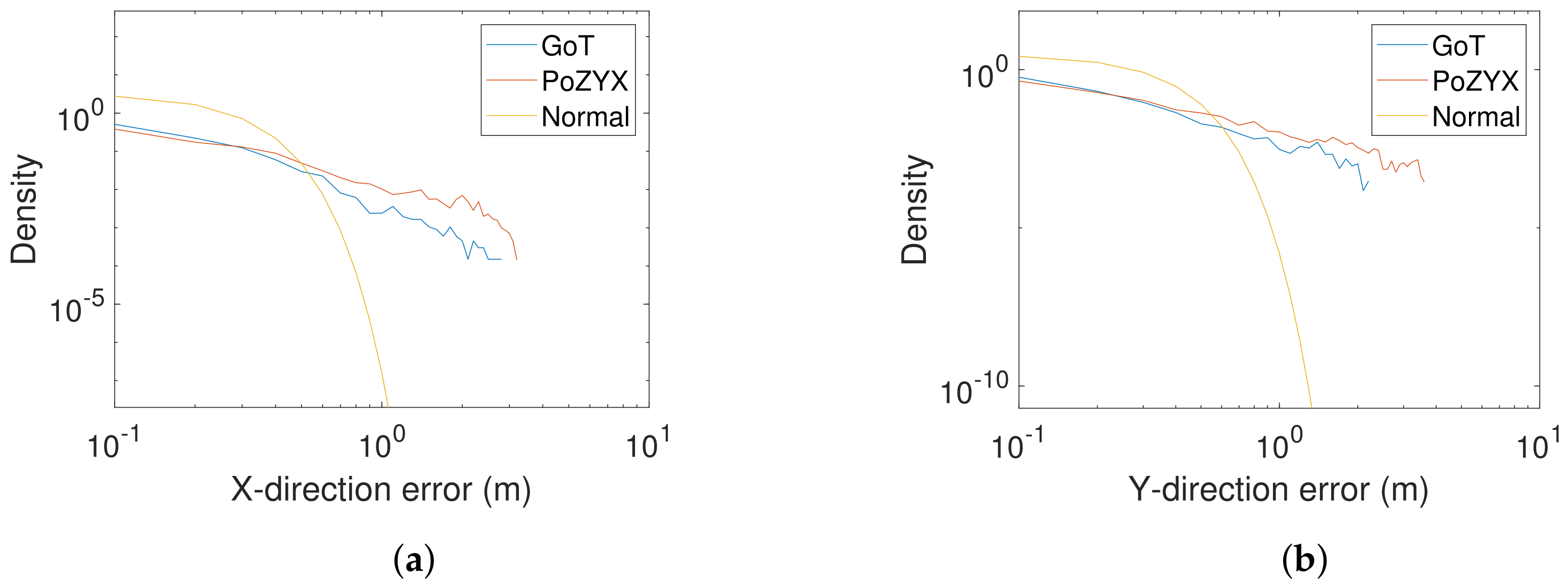
- The dynamic part involves attaching one tag on top of an indoor autonomous robot. The robot travels a predefined trajectory visiting almost all ground-truth points on the floor. The robot travels at an average speed of 0.5 m/s. Whereas the static evaluation is intended to show long-term average performance and reveal potential bias, the dynamic part is intended to show the performance when applied to a mobile robot and reveal potential short term error. Therefore, distance errors in X- and Y-directions are subject to high-pass filtering. Outputs of first-order high-pass filters with cut-off frequency 10 Hz are used as evaluation metrics for the dynamic case subject to statistical analysis. As suggested in the detailed analysis for a single selected ground-truth position, Pozyx measurements are subject to significant low-pass filtering. To account for this, we attempt the use of an estimated Wiener filter for both systems, which improves results for Pozyx, but not for GoT.
2.4. Analysis of Secondary Evaluation Parameters
3. Results
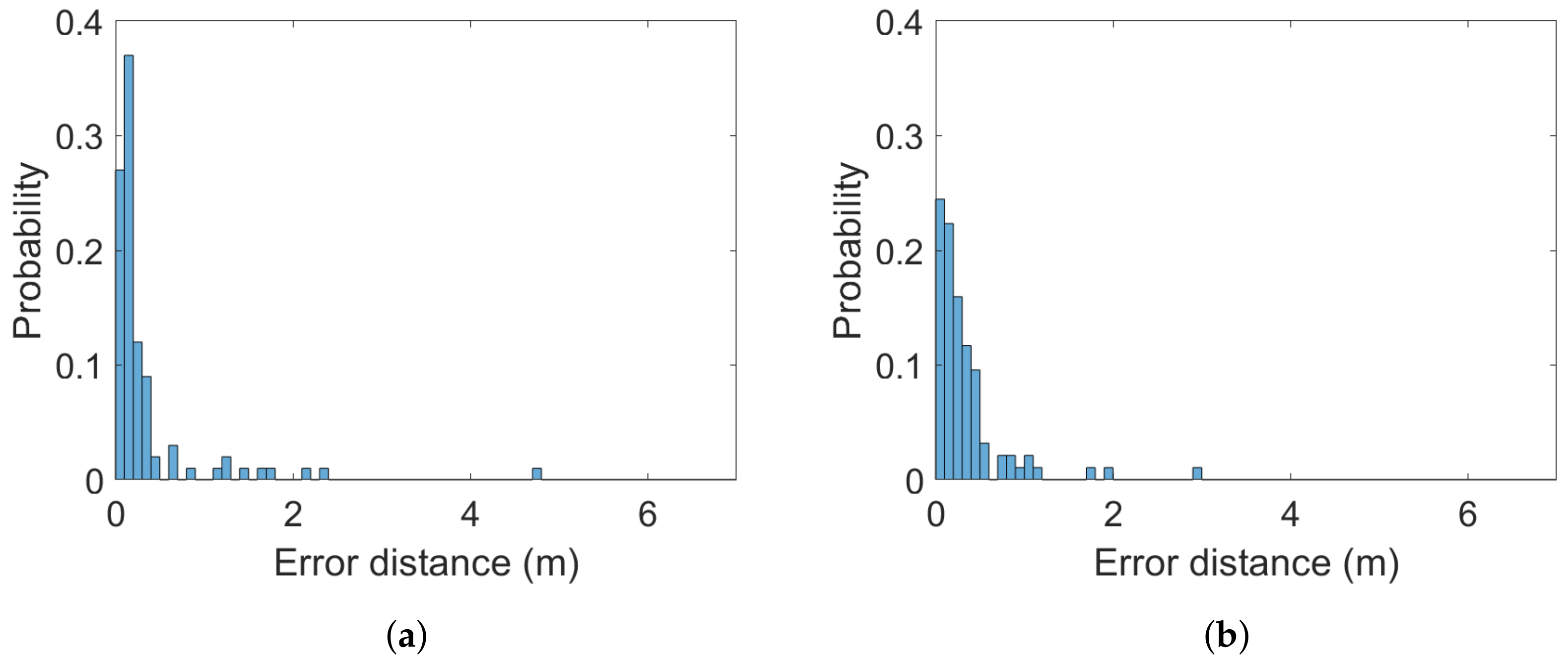
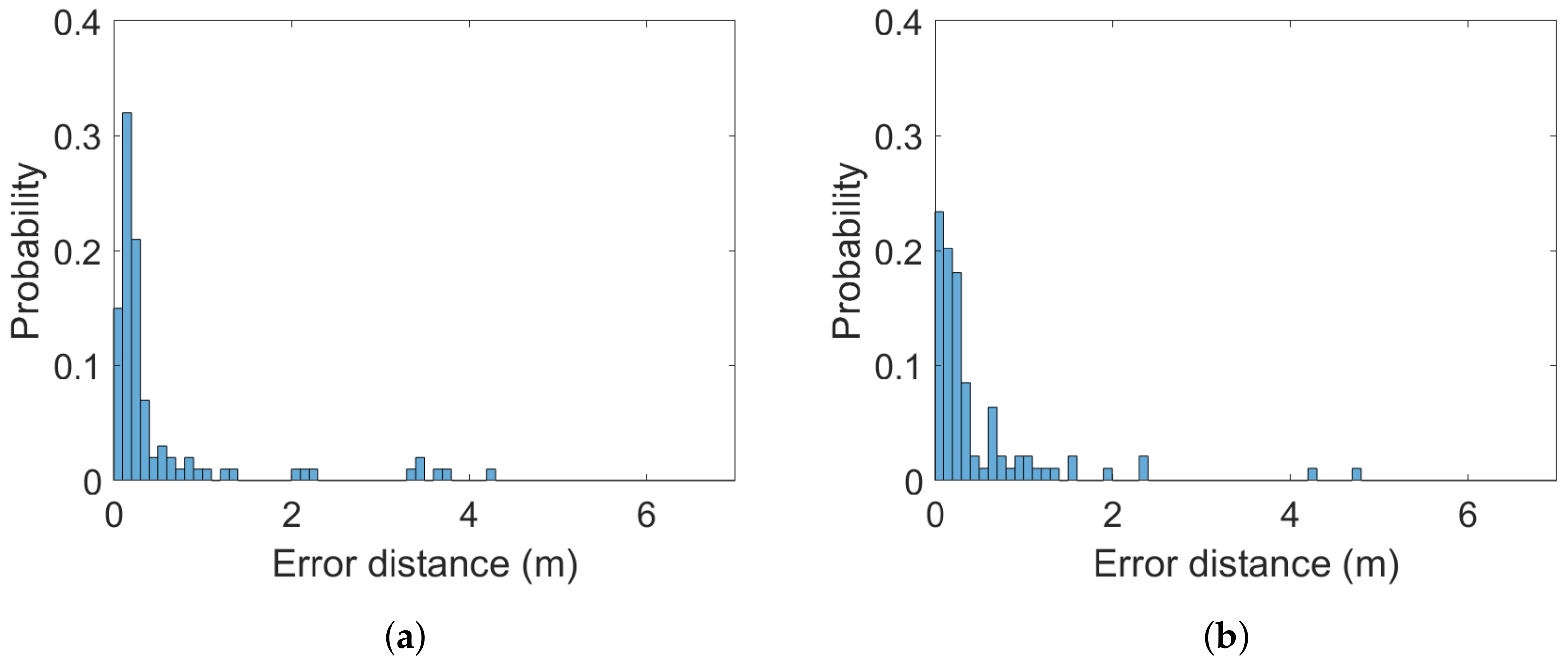
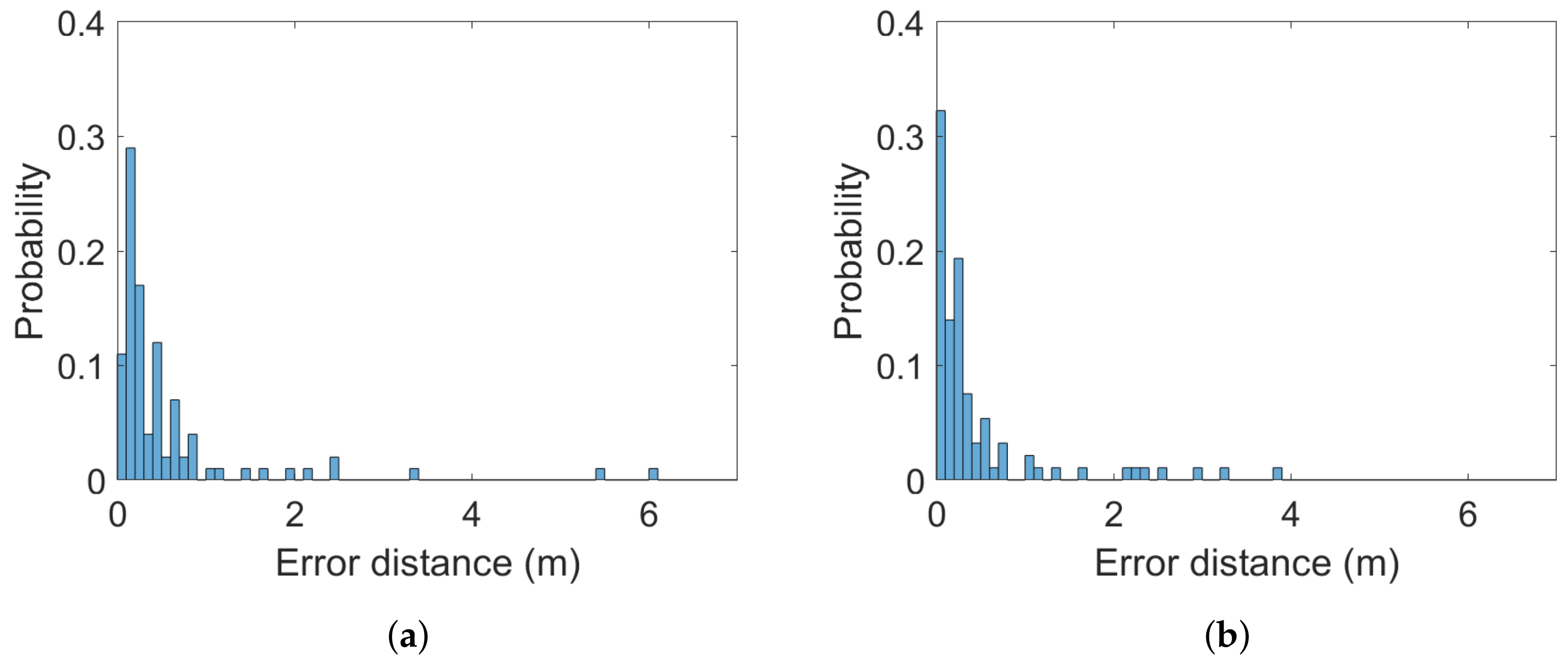
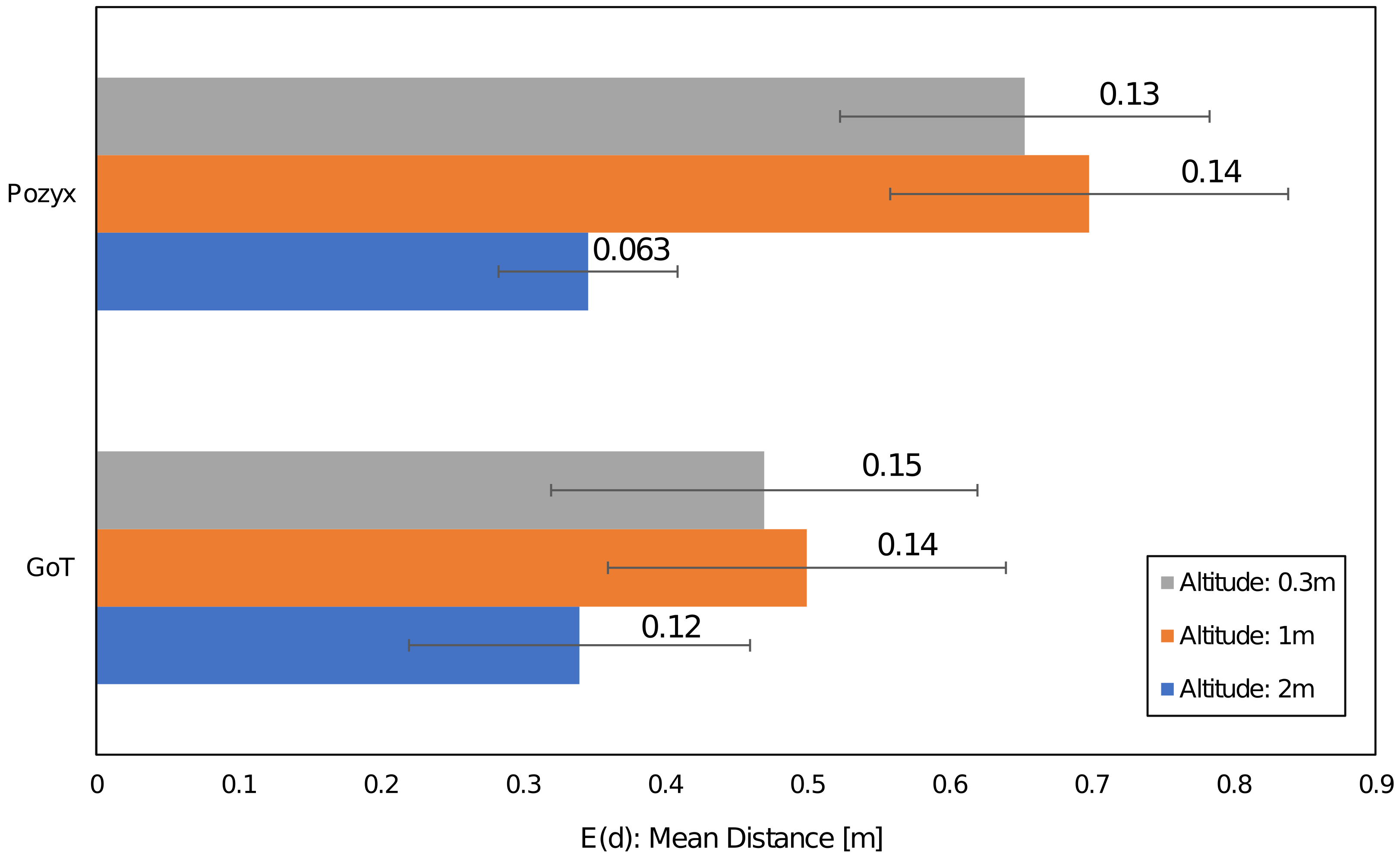
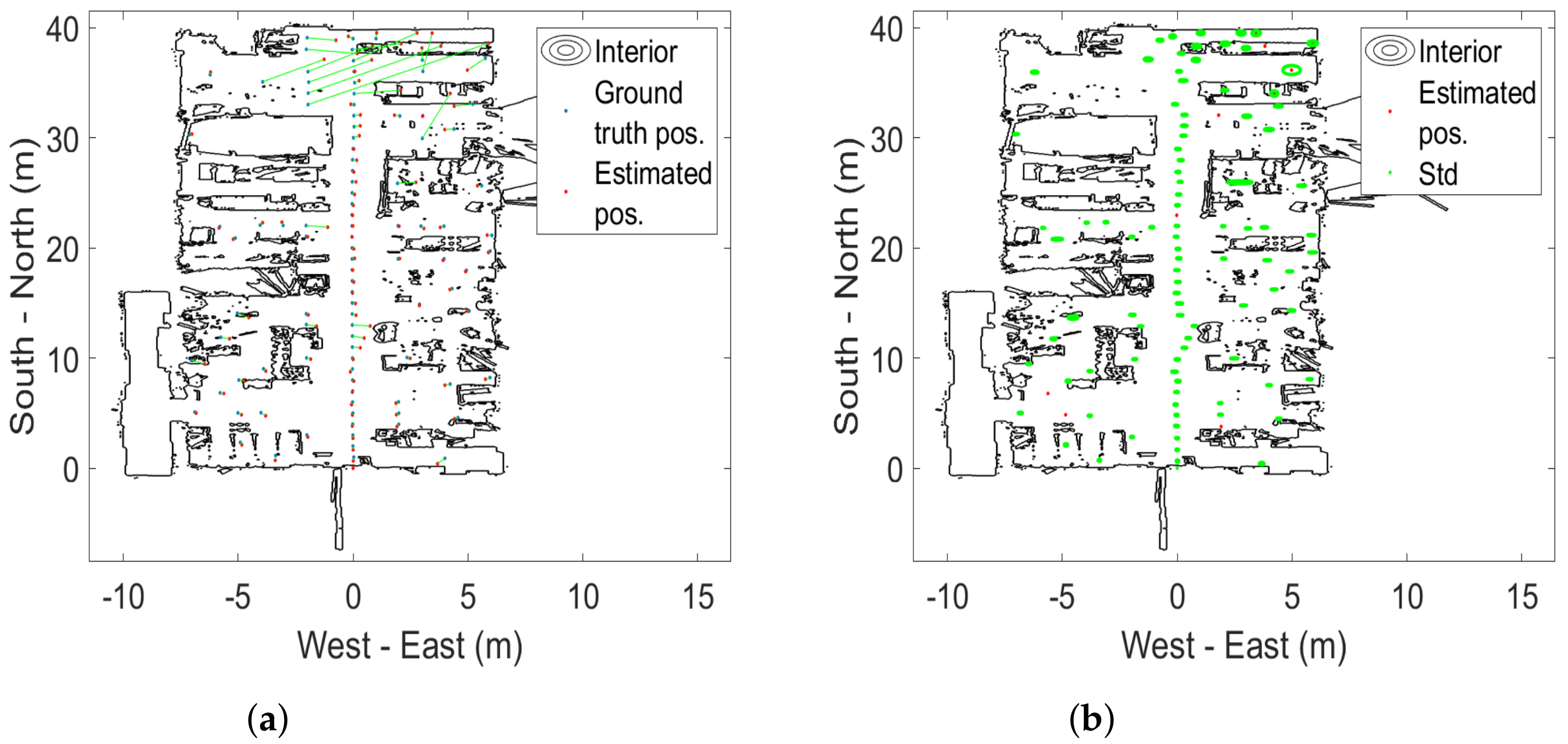
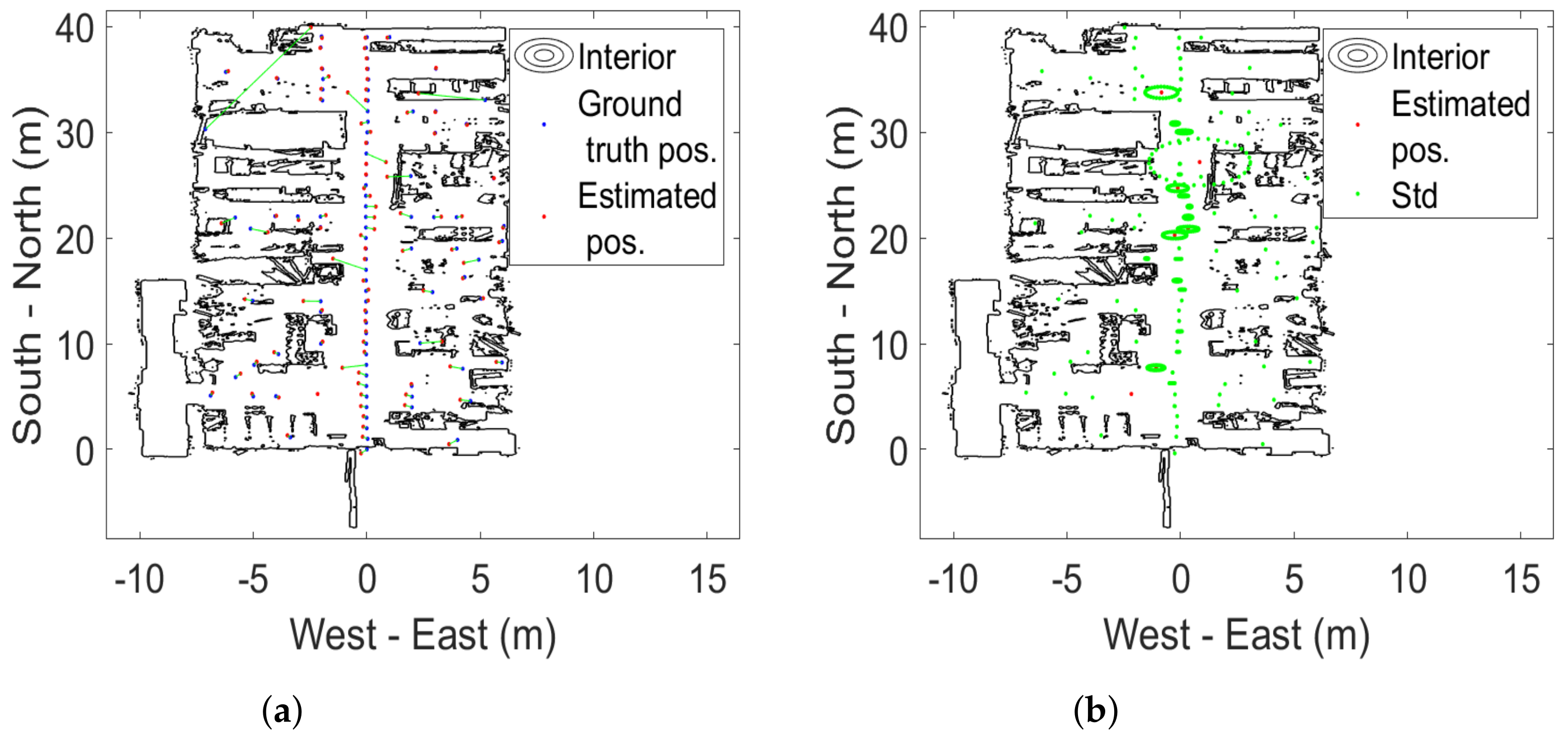
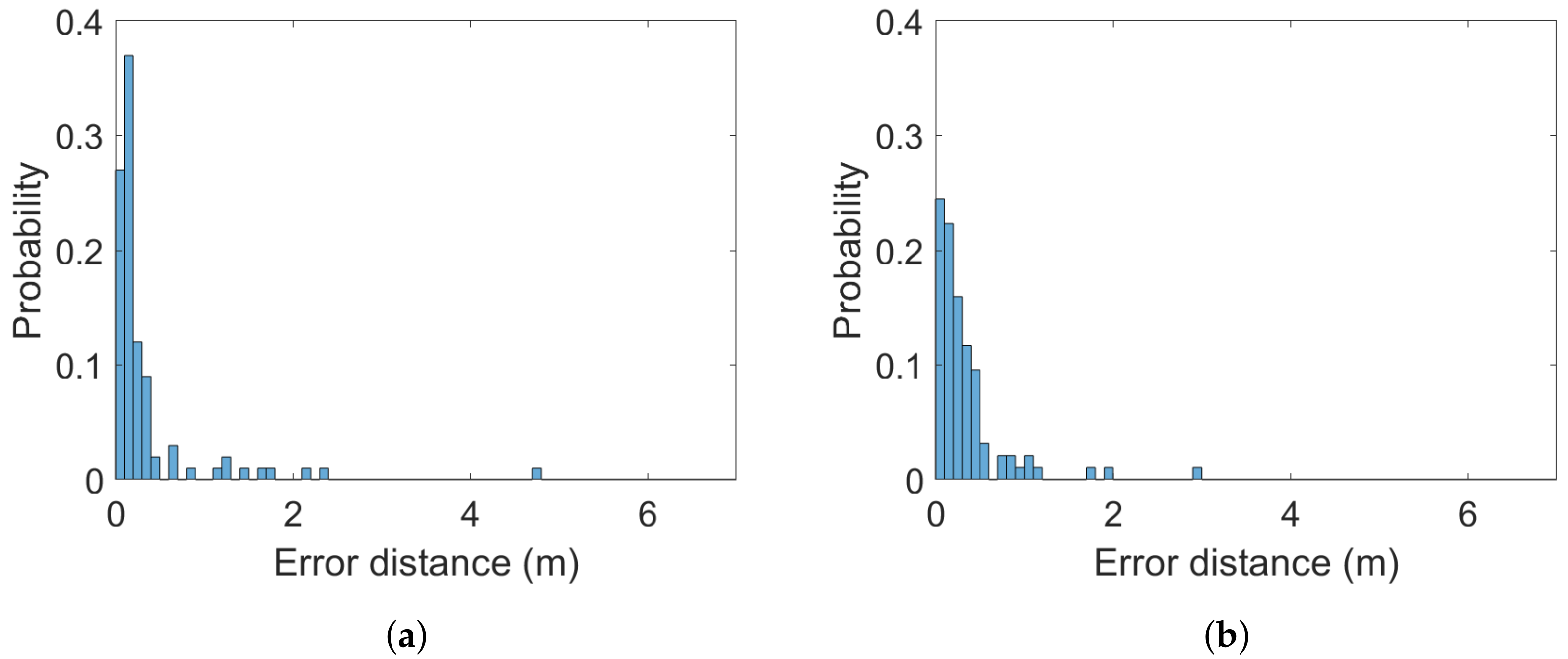
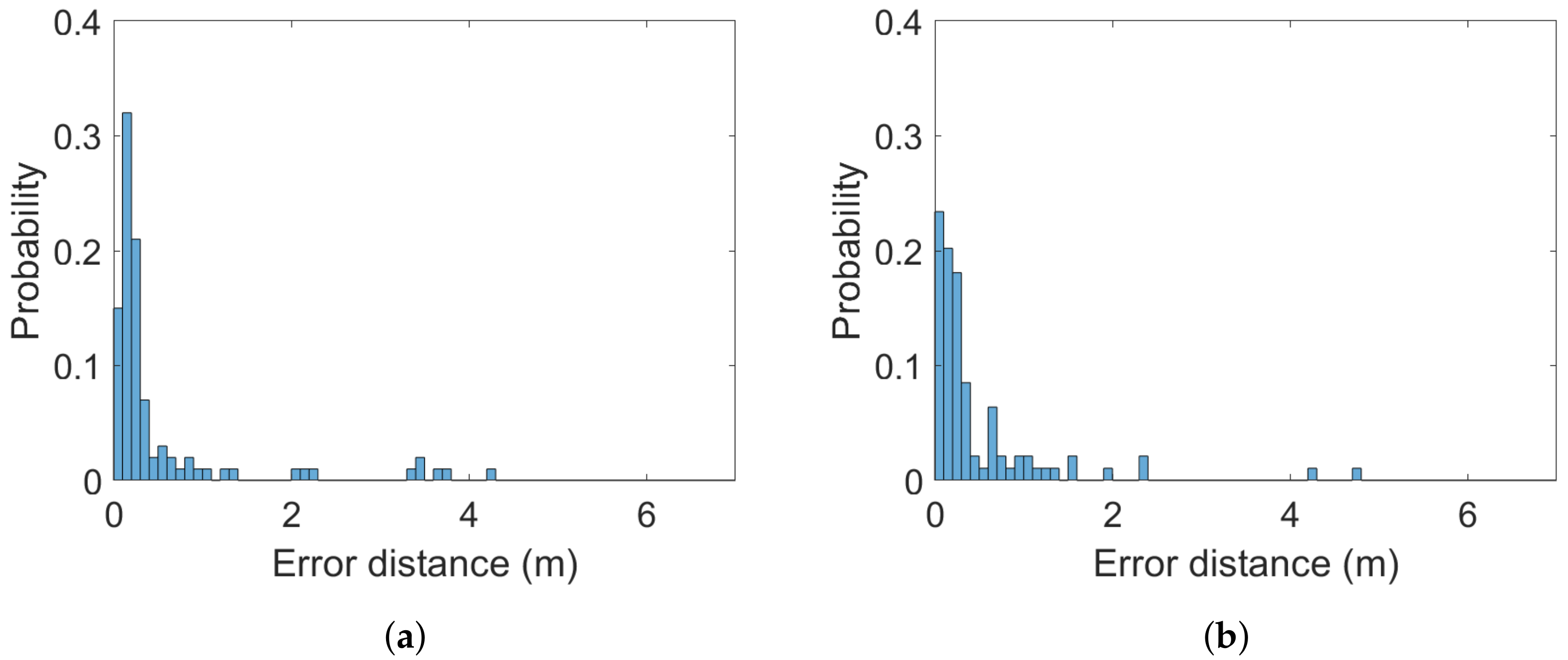
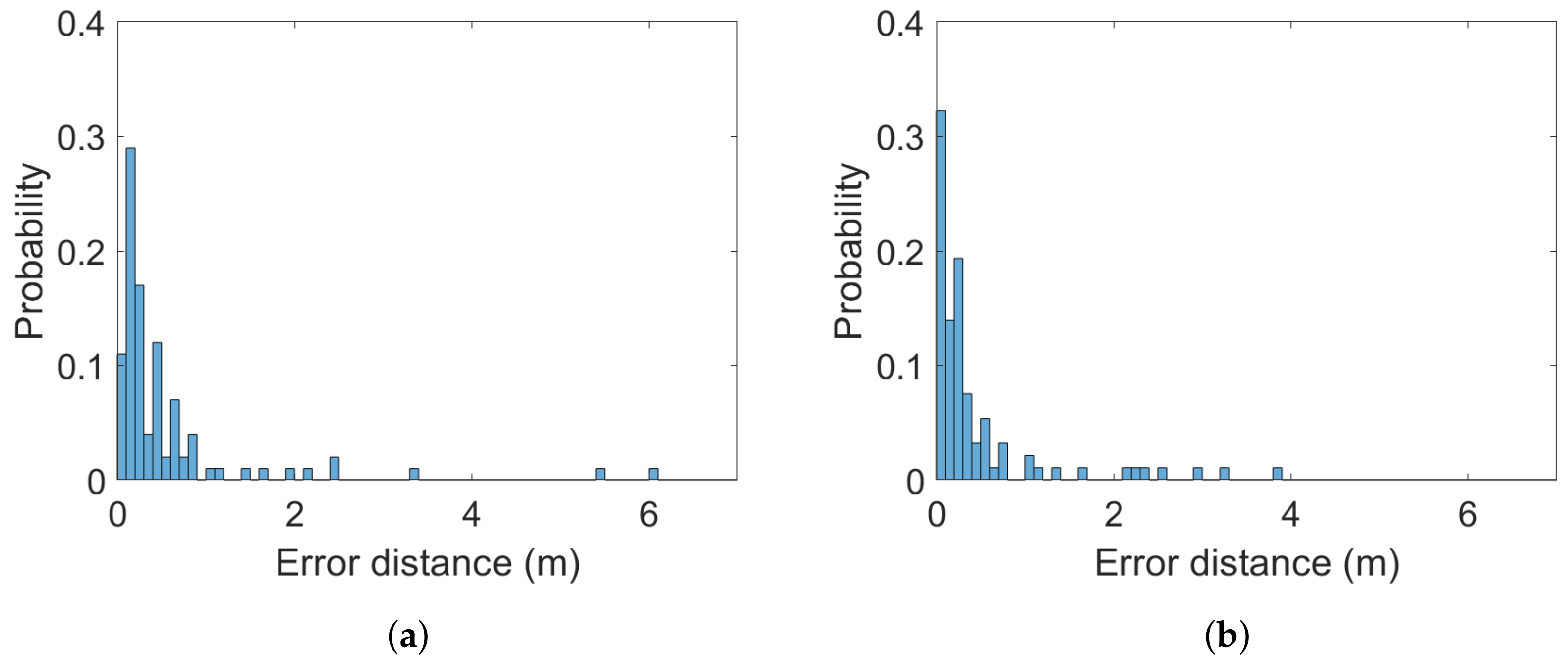
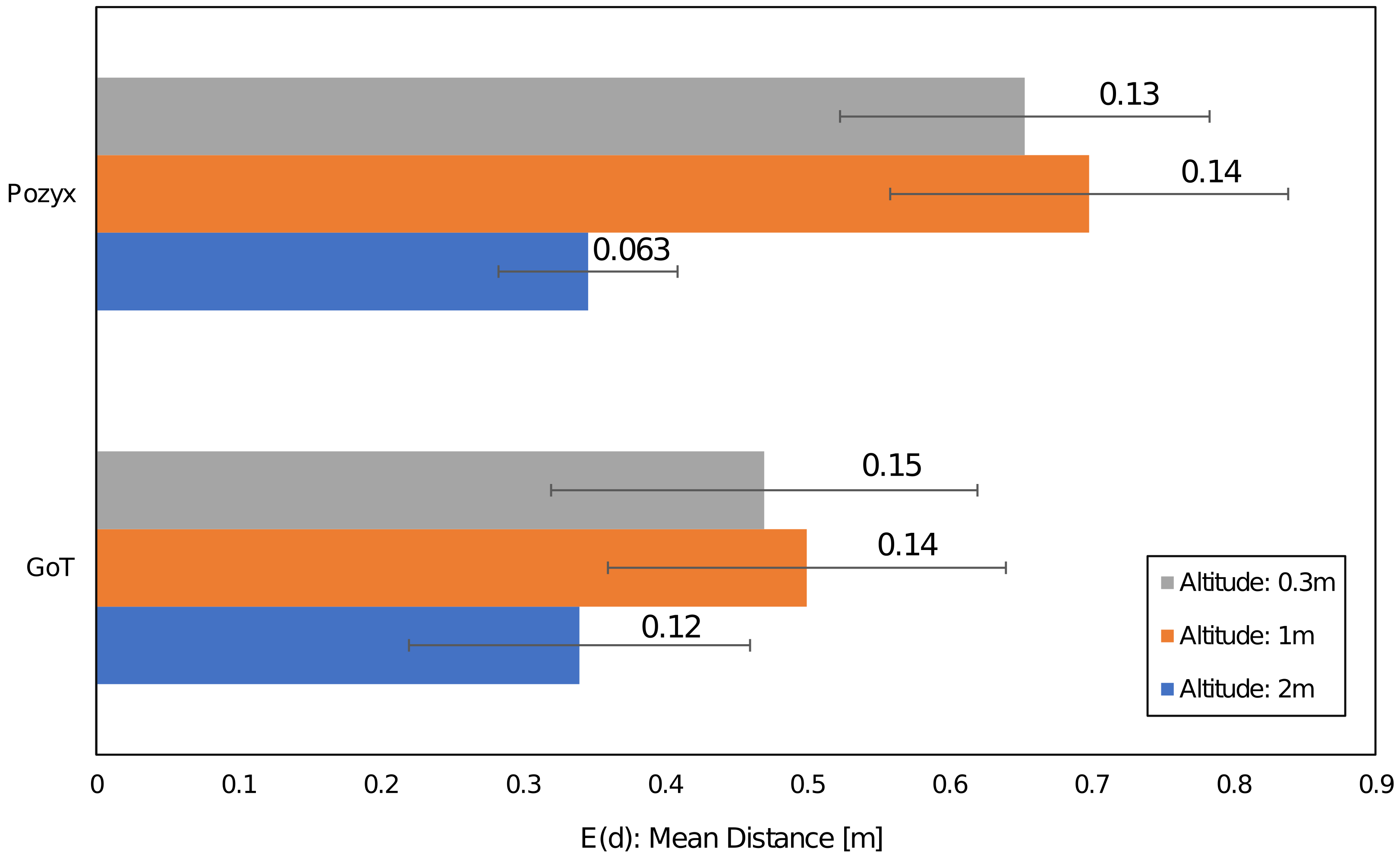
3.1. Static Case—Aggregate Results
| Altitude | E(d)/Std Pozyx | E(d)/Std GoT | Q50/0.9 CI Pozyx | Q50/0.9 CI GoT | Q90/0.9 CI Pozyx | Q90/0.9 CI GoT |
|---|---|---|---|---|---|---|
| 2 m | 0.3460/0.063 | 0.34/0.12 | 0.13/[0.11 0.15] | 0.17/[0.12 0.22] | 0.77/[0.38 1.34] | 0.77/[0.48 1.1] |
| 1 m | 0.6986/0.14 | 0.5/0.14 | 0.16/[0.13 0.2] | 0.19/[0.15 0.24] | 2.1/[0.77 3.4] | 1.2/[0.87 2.1] |
| 0.3 m | 0.6553/0.13 | 0.47/0.15 | 0.21/[0.16 0.26] | 0.16/[0.11 0.2] | 1.3/[0.8 2.2] | 1.3/[0.75 2.3] |
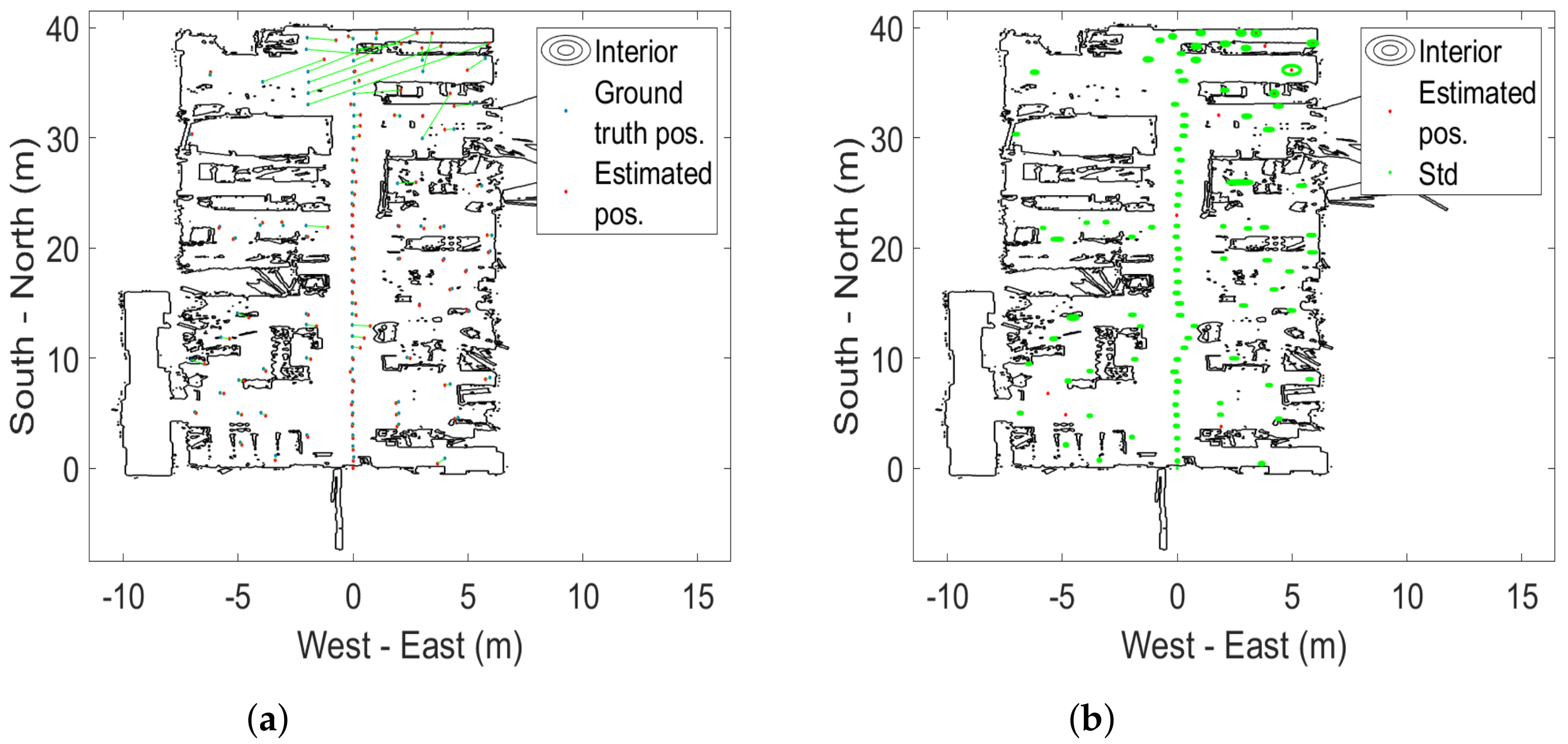
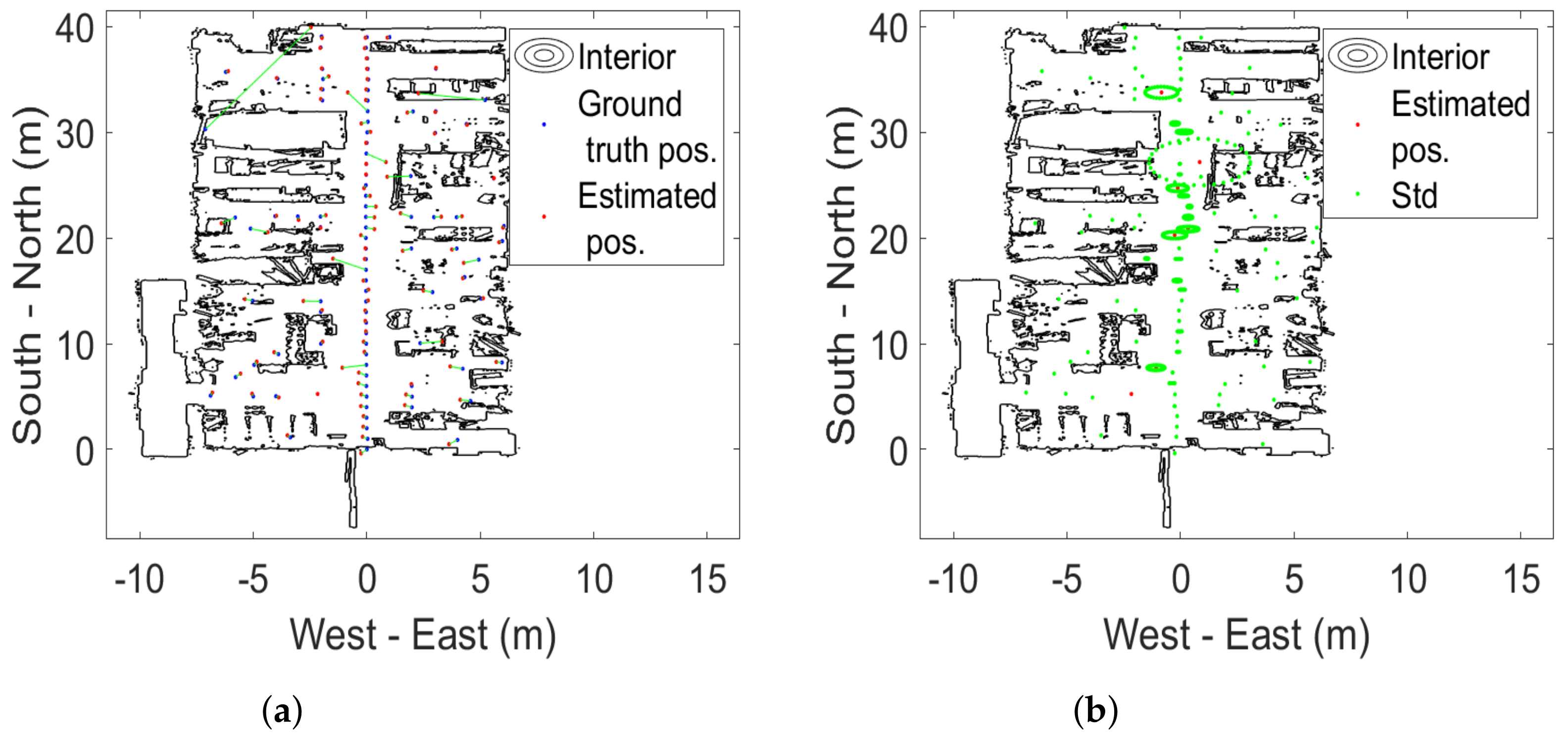
3.2. Static Case—LoS-Only Results
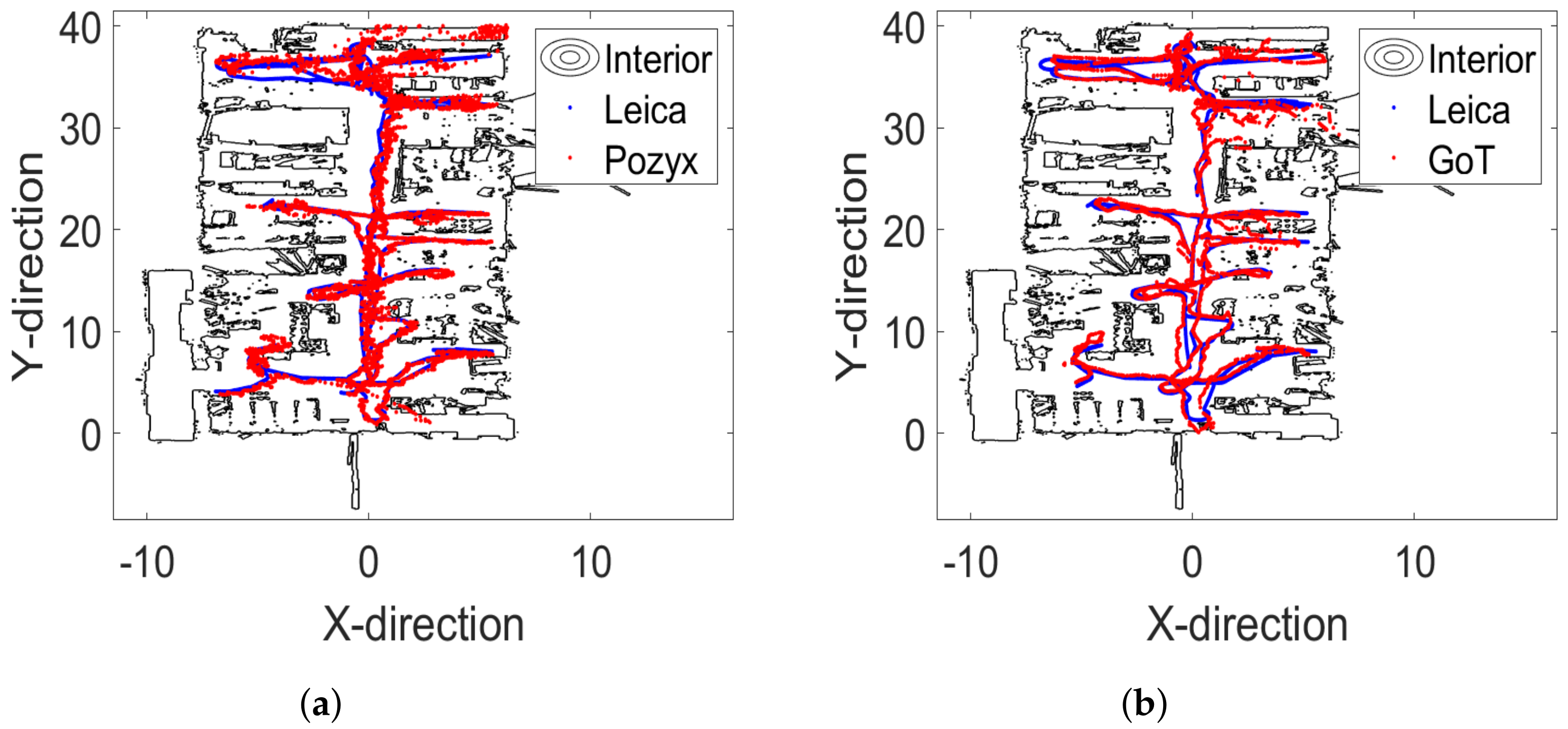
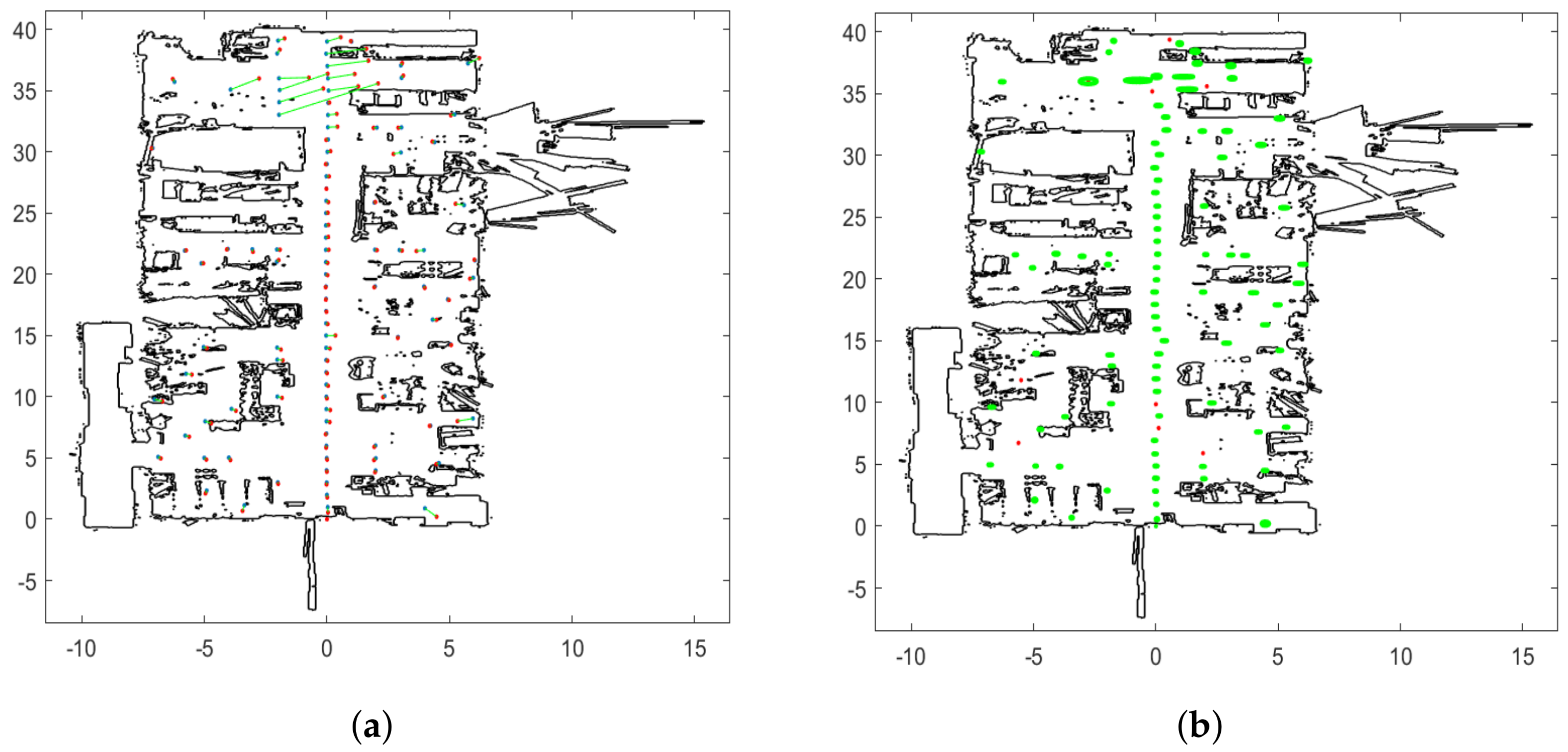
3.3. Position Tracking
3.4. Dynamic Case Results
3.4.1. Filtering
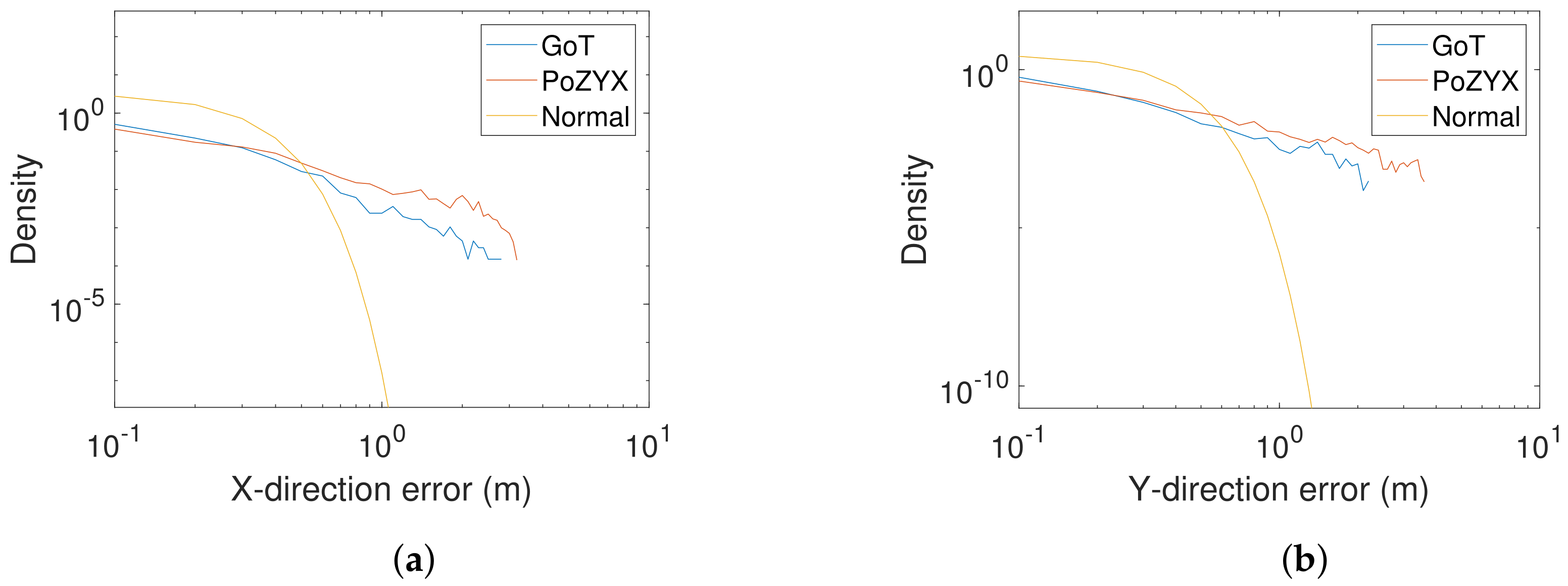
3.4.2. Quantitative Error Assessment
4. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Summary of the Sensitivity Analysis Performed on the Pozyx System in AAU Smart Lab
Appendix B. Pozyx and GoT Measurements for 0.3 and 2 m Tag Altitudes
Appendix C. Derivation of Formula (4)
References
- Xu, M.; David, J.; Kim, S. The Fourth Industrial Revolution: Opportunities and Challenges. Int. J. Financ. Res. 2018, 9, 90. [Google Scholar] [CrossRef] [Green Version]
- Siegwart, R.; Nourbakhsh, I.R. Introduction to Autonomous Mobile Robots; Bradford Company: Holland, MI, USA, 2004. [Google Scholar]
- Biagi, L.; Capra, A.; Castagnetti, C.; Dubbini, M.; Unguendoli, F. GPS Navigation for Precision Farming. ISPRS Arch. 2008, XXXVI, 46–53. [Google Scholar]
- Montemerlo, M.; Koller, D.; Wegbreit, B. FastSLAM: A Factored Solution to the Simultaneous Localization and Mapping Problem. 2002. Available online: https://www.aaai.org/Papers/AAAI/2002/AAAI02-089.pdf (accessed on 10 October 2020).
- Seki, H.; Tanaka, Y.; Takano, M.; Sasaki, K. Positioning System for Indoor Mobile Robot Using Active Ultrasonic Beacons. IFAC Proc. Vol. 1998, 31, 195–200. [Google Scholar] [CrossRef]
- Bhuller, J.; Peña, P.; II, V.; Simeon, J.; Materum, L. Ultra Wide Band-based Control of Emulated Autonomous Vehicles for Collision Avoidance in a Four-Way Intersection. Adv. Sci. Technol. Eng. Syst. J. 2020, 5, 724–730. [Google Scholar] [CrossRef]
- Mimoune, K.M.; Ahriz, I.; Guillory, J. Evaluation and Improvement of Localization Algorithms Based on UWB Pozyx System. In Proceedings of the 2019 International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 19–21 September 2019; pp. 1–5. [Google Scholar]
- Lymberopoulos, D.; Liu, J. The Microsoft Indoor Localization Competition: Experiences and Lessons learned. IEEE Signal Process. Mag. 2017, 34, 125–140. [Google Scholar] [CrossRef]
- Hightower, J.; Borriello, G. Location Systems for Ubiquitous Computing. Computer 2001, 34, 57–66. [Google Scholar] [CrossRef] [Green Version]
- Fukuju, Y.; Minami, M.; Morikawa, H.; Aoyama, T. DOLPHIN: An Autonomous Indoor Positioning System in Ubiquitous Computing Environment. In Proceedings of the IEEE Workshop on Software Technologies for Future Embedded Systems, WSTFES 2003, Hokkaido, Japan, 15–16 May 2003; pp. 53–56. [Google Scholar]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Mainetti, L.; Patrono, L.; Sergi, I. A Survey on Indoor Positioning Systems. In Proceedings of the 2014 22nd International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 17–19 September 2014; pp. 111–120. [Google Scholar]
- Ijaz, F.; Yang, H.K.; Ahmad, A.W.; Lee, C. Indoor Positioning: A Review of Indoor Ultrasonic Positioning Systems. In Proceedings of the 2013 15th International Conference on Advanced Communications Technology (ICACT), PyeongChang, Korea, 27–30 January 2013; pp. 1146–1150. [Google Scholar]
- Brena, R.F.; García-Vázquez, J.P.; Galván-Tejada, C.E.; Muñoz-Rodriguez, D.; Vargas-Rosales, C.; Fangmeyer, J. Evolution of Indoor Positioning Technologies: A survey. J. Sens. 2017, 2017, 2630413. [Google Scholar] [CrossRef]
- Priyantha, N.B.; Chakraborty, A.; Balakrishnan, H. The Cricket Location-Support System. In Proceedings of the 6th Annual International Conference on Mobile Computing and Networking, Boston, MA, USA, 6–11 August 2000; pp. 32–43. [Google Scholar]
- Ruiz, A.R.J.; Granja, F.S. Comparing Ubisense, BeSpoon, and DecaWave UWB Location Systems: Indoor Performance Analysis. IEEE Trans. Instrum. Meas. 2017, 66, 2106–2117. [Google Scholar] [CrossRef]
- Pozyx. Available online: https://pozyx.io/products-and-services/enterprise/ (accessed on 10 July 2020).
- Tiemann, J.; Eckermann, F.; Wietfeld, C. Atlas-An Open-Source TDoA-based Ultra-Wideband Localization System. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–6. [Google Scholar]
- Martinelli, A.; Jayousi, S.; Caputo, S.; Mucchi, L. UWB Positioning for Industrial Applications: The Galvanic Plating Case Study. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Contreras, D.; Castro, M.; de la Torre, D.S. Performance Evaluation of Bluetooth Low Energy in Indoor Positioning Systems. Trans. Emerg. Telecommun. Technol. 2017, 28, e2864. [Google Scholar] [CrossRef] [Green Version]
- Cerruela García, G.; Luque Ruiz, I.; Gómez-Nieto, M. State of the Art, Trends and Future of Bluetooth Low Energy, Near Field Communication and Visible Light Communication in the Development of Smart Cities. Sensors 2016, 16, 1968. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Xiao, Z.; Markham, A.; Trigoni, N.; Ren, Y. Does BTLE measure up against WiFi? A comparison of indoor location performance. In European Wireless 2014; 20th European Wireless Conference, Barcelona, Spain, 14–16 May 2014; VDE: Berlin, Germany, 2014; pp. 1–6. [Google Scholar]
- Zafari, F.; Papapanagiotou, I.; Devetsikiotis, M.; Hacker, T. An iBeacon based Proximity and Indoor Localization System. arXiv 2017, arXiv:1703.07876. [Google Scholar]
- Röbesaat, J.; Zhang, P.; Abdelaal, M.; Theel, O. An Improved BLE Indoor Localization with Kalman-Based Fusion: An Experimental Study. Sensors 2017, 17, 951. [Google Scholar] [CrossRef] [PubMed]
- Lim, J.S.; Song, K.I.; Lee, H.L. Real-Time Location Tracking of Multiple Construction Laborers. Sensors 2016, 16, 1869. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- De Blasio, G.; Quesada-Arencibia, A.; García, C.R.; Molina-Gil, J.M.; Caballero-Gil, C. Study on an indoor positioning system for harsh environments based on Wi-Fi and bluetooth low energy. Sensors 2017, 17, 1299. [Google Scholar] [CrossRef] [PubMed]
- Arsan, T.; Kepez, O. Early Steps in Automated Behavior Mapping via Indoor Sensors. Sensors 2017, 17, 2925. [Google Scholar] [CrossRef] [Green Version]
- Kolakowski, J.; Djaja-Josko, V.; Kolakowski, M.; Broczek, K. UWB/BLE tracking system for elderly people monitoring. Sensors 2020, 20, 1574. [Google Scholar] [CrossRef] [Green Version]
- Ramirez, R.; Huang, C.Y.; Liao, C.A.; Lin, P.T.; Lin, H.W.; Liang, S.H. A Practice of BLE RSSI Measurement for Indoor Positioning. Sensors 2021, 21, 5181. [Google Scholar] [CrossRef]
- Andersson, P.; Persson, L. Evaluation of Bluetooth 5.1 as an Indoor Positioning System. 2020. Available online: http://kth.diva-portal.org/smash/get/diva2:1468130/FULLTEXT01.pdf (accessed on 21 January 2022).
- Cominelli, M.; Patras, P.; Gringoli, F. Dead on arrival: An empirical Study of the Bluetooth 5.1 Positioning System. In Proceedings of the 13th International Workshop on Wireless Network Testbeds, Experimental Evaluation & Characterization, Los Cabos, Mexico, 25 October 2019; pp. 13–20. [Google Scholar]
- Ward, A.; Jones, A.; Hopper, A. A New Location Technique for the Active Office. IEEE Pers. Commun. 1997, 4, 42–47. [Google Scholar] [CrossRef] [Green Version]
- Deak, G.; Curran, K.; Condell, J. A Survey of Active and Passive Indoor Localisation Systems. Comput. Commun. 2012, 35, 1939–1954. [Google Scholar] [CrossRef]
- Harter, A.; Hopper, A. A Distributed Location System for the Active Office. IEEE Netw. 1994, 8, 62–70. [Google Scholar] [CrossRef]
- Sanchez, A.; de Castro, A.; Elvira, S.; Glez-de Rivera, G.; Garrido, J. Autonomous Indoor Ultrasonic Positioning System Based on a Low-Cost Conditioning Circuit. Measurement 2012, 45, 276–283. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Han, G.; Zhu, C.; Sun, G. An Indoor Ultrasonic Positioning System Based on ToA for Internet of Things. Mob. Inf. Syst. 2016, 2016, 4502867. [Google Scholar] [CrossRef]
- Qi, J.; Liu, G.P. A Robust High-Accuracy Ultrasound Indoor Positioning System based on a Wireless Sensor Network. Sensors 2017, 17, 2554. [Google Scholar] [CrossRef] [Green Version]
- Gualda, D.; Villadangos, J.M.; Ureña, J.; Ruiz, A.R.J.; Seco, F.; Hernández, Á. Indoor Positioning in Large Environments: Ultrasonic and UWB Technologies. In IPIN (Short Papers/Work-in-Progress Papers); 2019; pp. 362–369. Available online: http://ceur-ws.org/Vol-2498/short47.pdf (accessed on 13 December 2020).
- Piccinni, G.; Avitabile, G.; Coviello, G.; Talarico, C. Real-time distance evaluation system for wireless localization. IEEE Trans. Circuits Syst. I Regul. Pap. 2020, 67, 3320–3330. [Google Scholar] [CrossRef]
- Silva, B.; Pang, Z.; Åkerberg, J.; Neander, J.; Hancke, G. Experimental Study of UWB-based High Precision Localization for Industrial Applications. In Proceedings of the 2014 IEEE International Conference on Ultra-WideBand (ICUWB), Paris, France, 1–3 September 2014; pp. 280–285. [Google Scholar] [CrossRef]
- Barral, V.; Suárez-Casal, P.; Escudero, C.J.; García-Naya, J.A. Multi-Sensor Accurate Forklift Location and Tracking Simulation in Industrial Indoor Environments. Electronics 2019, 8, 1152. [Google Scholar] [CrossRef] [Green Version]
- Delamare, M.; Boutteau, R.; Savatier, X.; Iriart, N. Static and Dynamic Evaluation of an UWB Localization System for Industrial Applications. Sci 2020, 2, 23. [Google Scholar] [CrossRef] [Green Version]
- Schweinzer, H.; Syafrudin, M. LOSNUS: An Ultrasonic System Enabling High Accuracy and Secure TDoA Locating of Numerous Devices. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 1–8. [Google Scholar] [CrossRef]
- GamesOnTrack. Available online: http://www.gamesontrack.dk/ (accessed on 14 October 2021).
- Leica. Available online: https://leica-geosystems.com/products/total-stations/robotic-total-stations/leica-ts16 (accessed on 23 January 2022).
- Kulmer, J.; Hinteregger, S.; Großwindhager, B.; Rath, M.; Bakr, M.S.; Leitinger, E.; Witrisal, K. Using DecaWave UWB Transceivers for High-Accuracy Multipath-Assisted Indoor Positioning. In Proceedings of the 2017 IEEE International Conference on Communications Workshops (ICC Workshops), Paris, France, 21–25 May 2017; pp. 1239–1245. [Google Scholar]
- Gray, R.; Neuhoff, D. Quantization. IEEE Trans. Inf. Theory 1998, 44, 2325–2383. [Google Scholar] [CrossRef]
- How Does UWB Work. Available online: https://www.pozyx.io/pozyx-academy/how-does-ultra-wideband-work (accessed on 1 December 2021).
- Clavier, L.; Pedersen, T.; Larrad, I.; Lauridsen, M.; Egan, M. Experimental Evidence for Heavy Tailed Interference in the IoT. IEEE Commun. Lett. 2020, 25, 692–695. [Google Scholar] [CrossRef]
- Wiener, N. Extrapolation, Interpolation, and Smoothing of Stationary Time Series; MIT Press: Cambridge, MA, USA, 1949; Volume 2. [Google Scholar]
- Mitzenmacher, M. A Brief History of Generative Models for Power Law and Lognormal Distributions. Internet Math. 2004, 1, 226–251. [Google Scholar] [CrossRef] [Green Version]
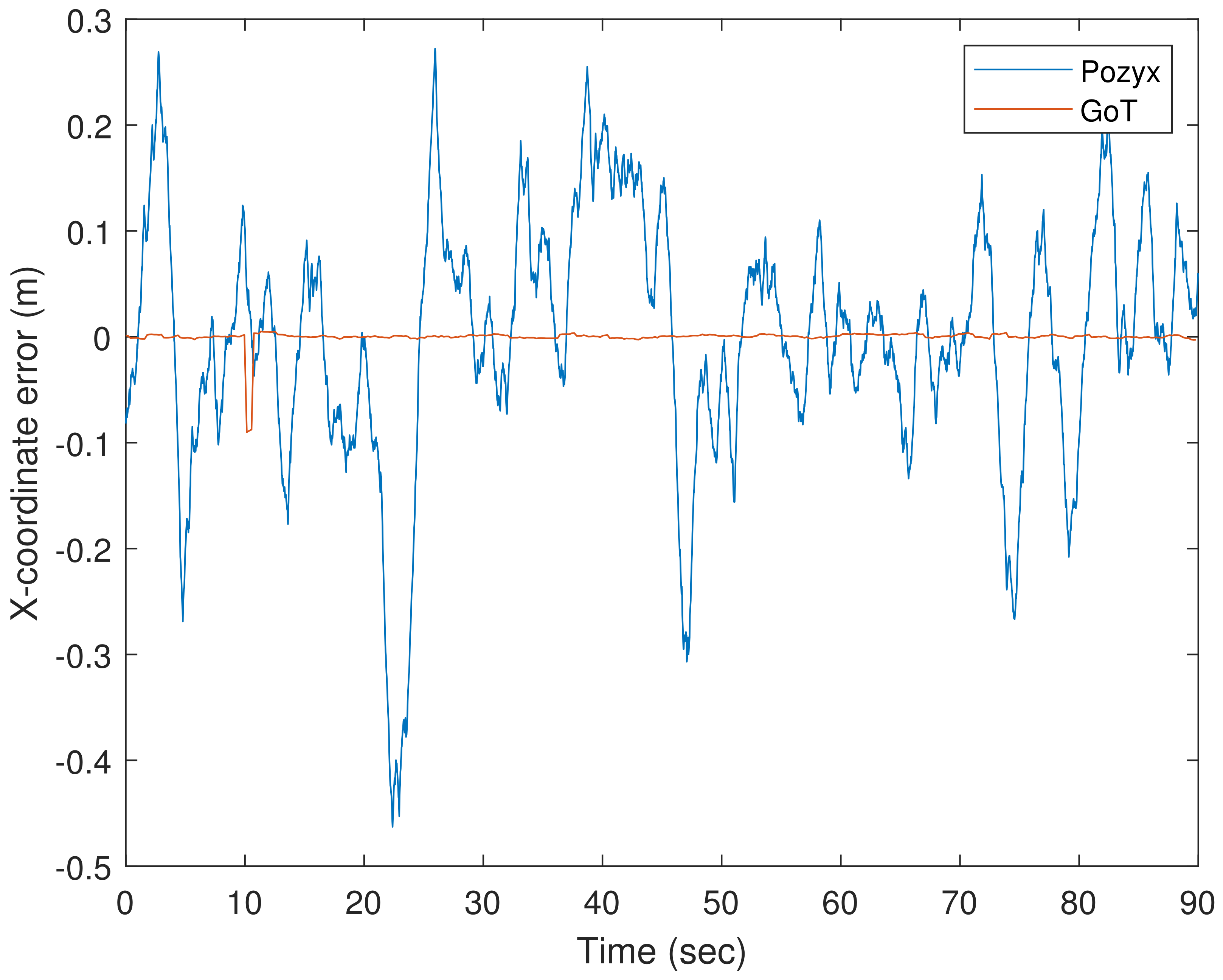
| Direction | RMS Error Filtered [m] | Std [m] | RMS Error Unfiltered [m] | Std [m] |
|---|---|---|---|---|
| X-axis GoT | 0.3289 | 0.013 | 0.3358 | 0.016 |
| X-axis Pozyx | 0.6224 | 0.3439 | 0.7139 | 0.7013 |
| Y-axis GoT | 0.3375 | 0.01 | 0.3437 | 0.013 |
| Y-axis Pozyx | 0.6172 | 0.3646 | 0.6599 | 0.4859 |
| Direction | Mean-Abs Error Filt. [m] | Std [m] | Q90/95% CI | Mean-Abs. Error Unfilt. [m] | Std [m] | Q90/95% CI |
|---|---|---|---|---|---|---|
| X-axis GoT | 0.2075 | 0.02 | 0.43 [0.3 0.48] | 0.1992 | 0.02 | 0.42 [0.33 0.49] |
| X-axis Pozyx | 0.3810 | 0.06 | 1.0 [0.58 2.0] | 0.4202 | 0.07 | 1.2 [0.71 2.0] |
| Y-axis GoT | 0.1984 | 0.02 | 0.43 [0.37 0.51] | 0.1954 | 0.02 | 0.44 [0.37 0.51] |
| Y-axis Pozyx | 0.3548 | 0.06 | 0.72 [0.61 1.3] | 0.3779 | 0.07 | 0.78 [0.56 1.5] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Crețu-Sîrcu, A.L.; Schiøler, H.; Cederholm, J.P.; Sîrcu, I.; Schjørring, A.; Larrad, I.R.; Berardinelli, G.; Madsen, O. Evaluation and Comparison of Ultrasonic and UWB Technology for Indoor Localization in an Industrial Environment. Sensors 2022, 22, 2927. https://doi.org/10.3390/s22082927
Crețu-Sîrcu AL, Schiøler H, Cederholm JP, Sîrcu I, Schjørring A, Larrad IR, Berardinelli G, Madsen O. Evaluation and Comparison of Ultrasonic and UWB Technology for Indoor Localization in an Industrial Environment. Sensors. 2022; 22(8):2927. https://doi.org/10.3390/s22082927
Chicago/Turabian StyleCrețu-Sîrcu, Amalia Lelia, Henrik Schiøler, Jens Peter Cederholm, Ion Sîrcu, Allan Schjørring, Ignacio Rodriguez Larrad, Gilberto Berardinelli, and Ole Madsen. 2022. "Evaluation and Comparison of Ultrasonic and UWB Technology for Indoor Localization in an Industrial Environment" Sensors 22, no. 8: 2927. https://doi.org/10.3390/s22082927
APA StyleCrețu-Sîrcu, A. L., Schiøler, H., Cederholm, J. P., Sîrcu, I., Schjørring, A., Larrad, I. R., Berardinelli, G., & Madsen, O. (2022). Evaluation and Comparison of Ultrasonic and UWB Technology for Indoor Localization in an Industrial Environment. Sensors, 22(8), 2927. https://doi.org/10.3390/s22082927