
Low-SNR Infrared Point Target Detection and Tracking via Saliency-Guided Double-Stage Particle Filter


Abstract
:1. Introduction
1.1. Detection before Track
1.2. Track before Detection
1.3. Motivation
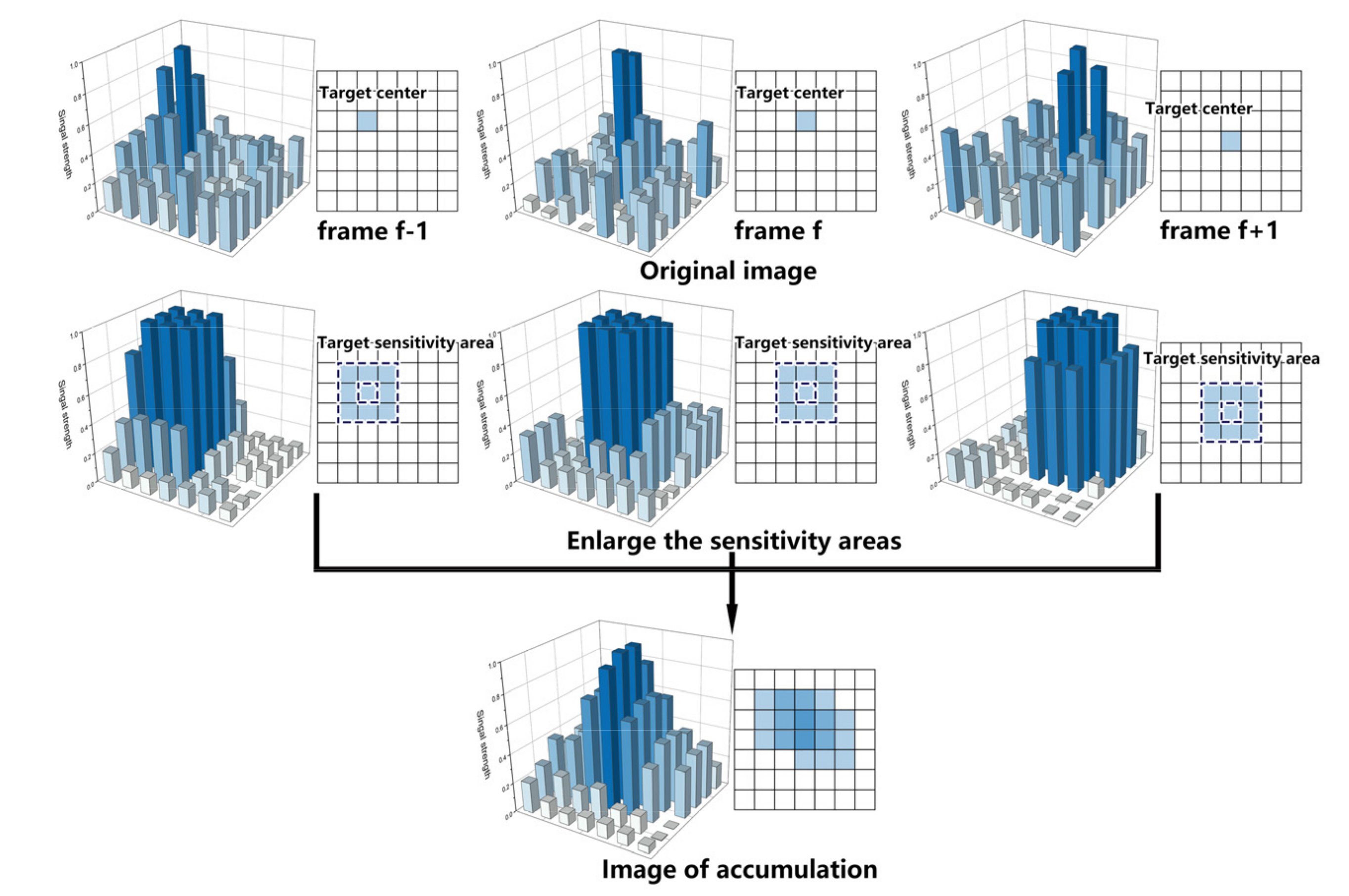
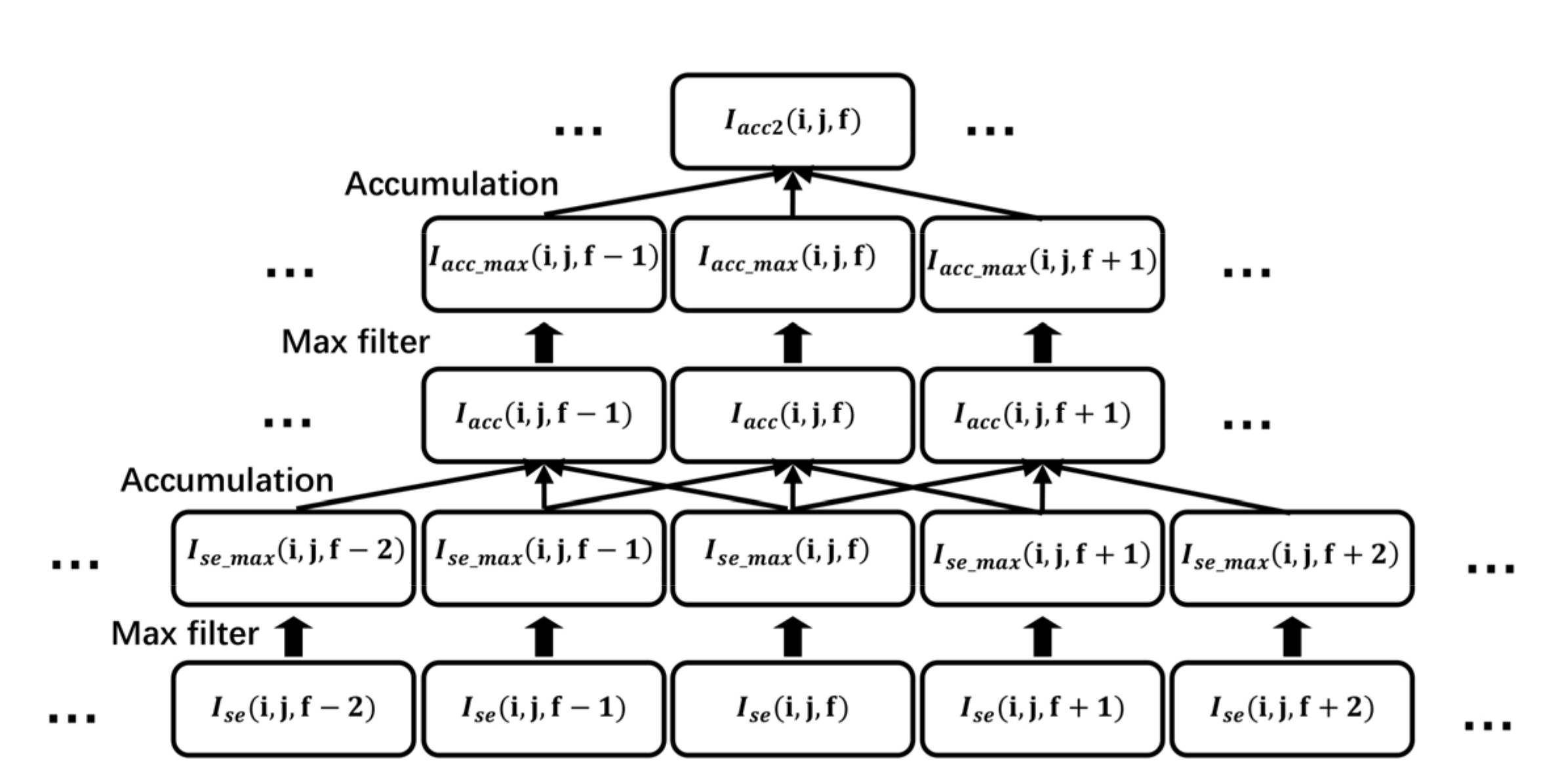
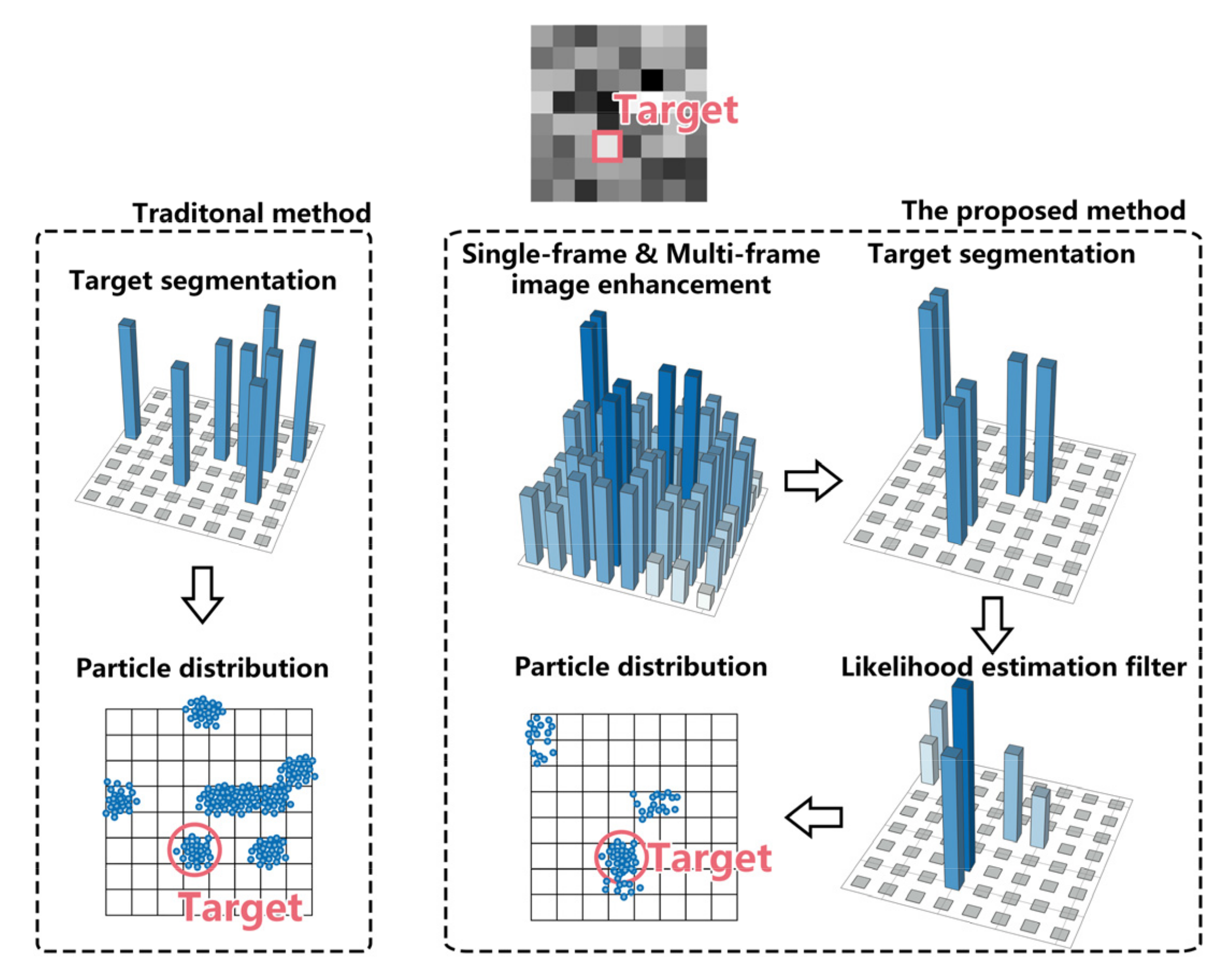
- Aiming at the poor particle sampling problem caused by low-SNR images, we proposed a multi-frame saliency extraction algorithm based on image patch. Unlike the traditional saliency extraction method using a single frame, a single-frame and multi-frame target accumulation method was designed to enhance the target and suppress noise first. On this basis, a likelihood estimation filter and image patch are used to extract target saliency and obtain a more accurate proposal density to guide the particles assigning.
- A dual PF is given to handle the loss target problem caused by intensive noise in near real-time. The searching PF uses relatively few particles to detect targets roughly. Using very few particles, the tracking PF and the target confirmation algorithm further track and confirm targets. The fewer particles decide the low computational complexity and guarantee the near real-time. Furthermore, different from the traditional threshold segmentation, the guideline of the SGDS-PF is bold detection and cautious verification. Compared with the traditional method, the real targets masked by intensive noise will obtain more chances to be detected.
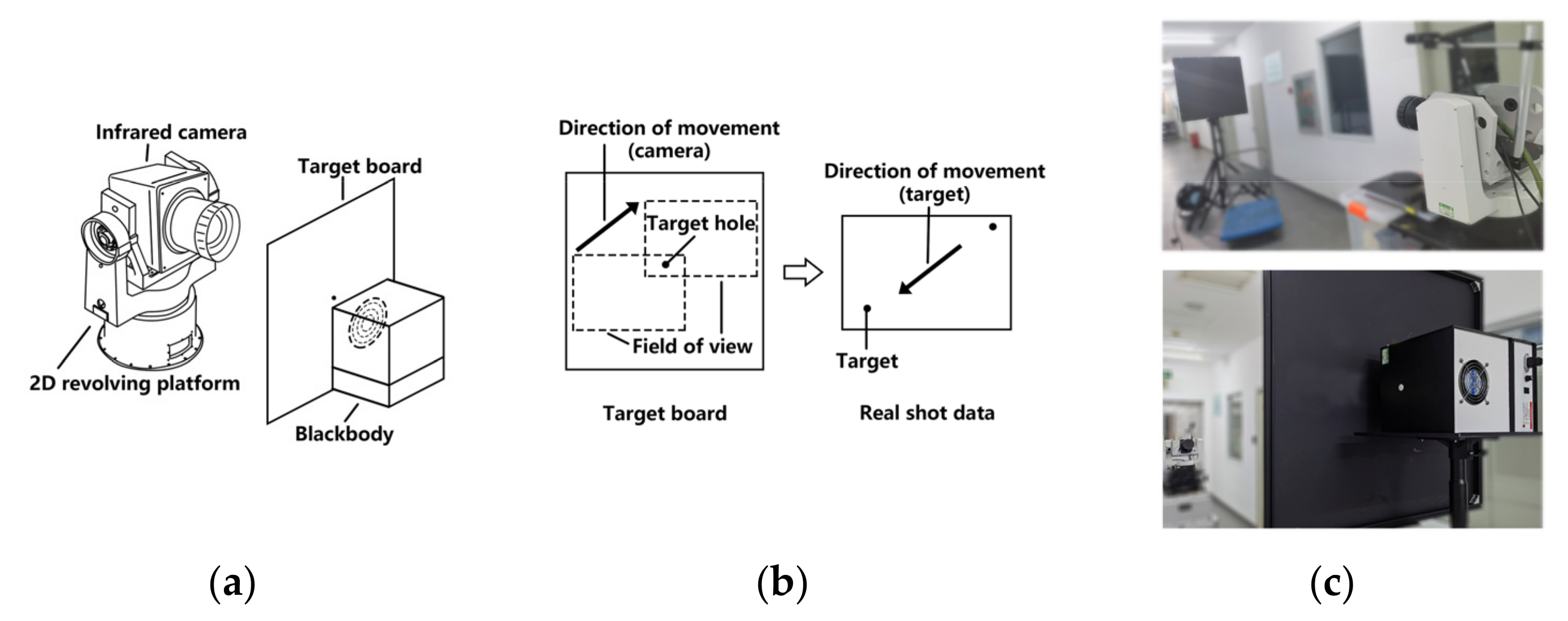
- This letter provides the set value of key parameters by analyzing simulation experiments. Furthermore, a semi-physical simulating experiment using a real infrared camera was designed to verify the feasibility and robustness of this method.
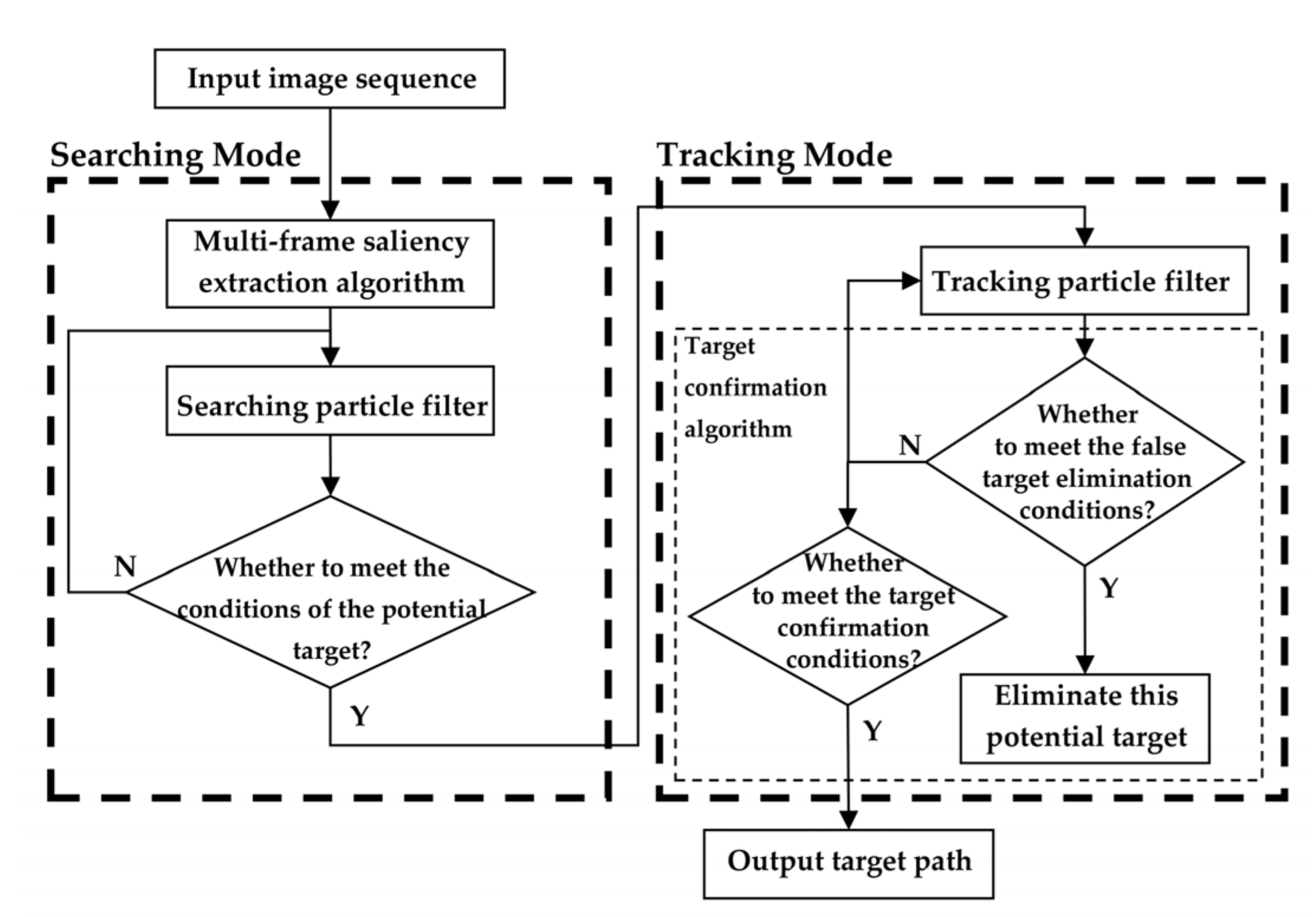
2. Methodology
2.1. Modified Particle Filter
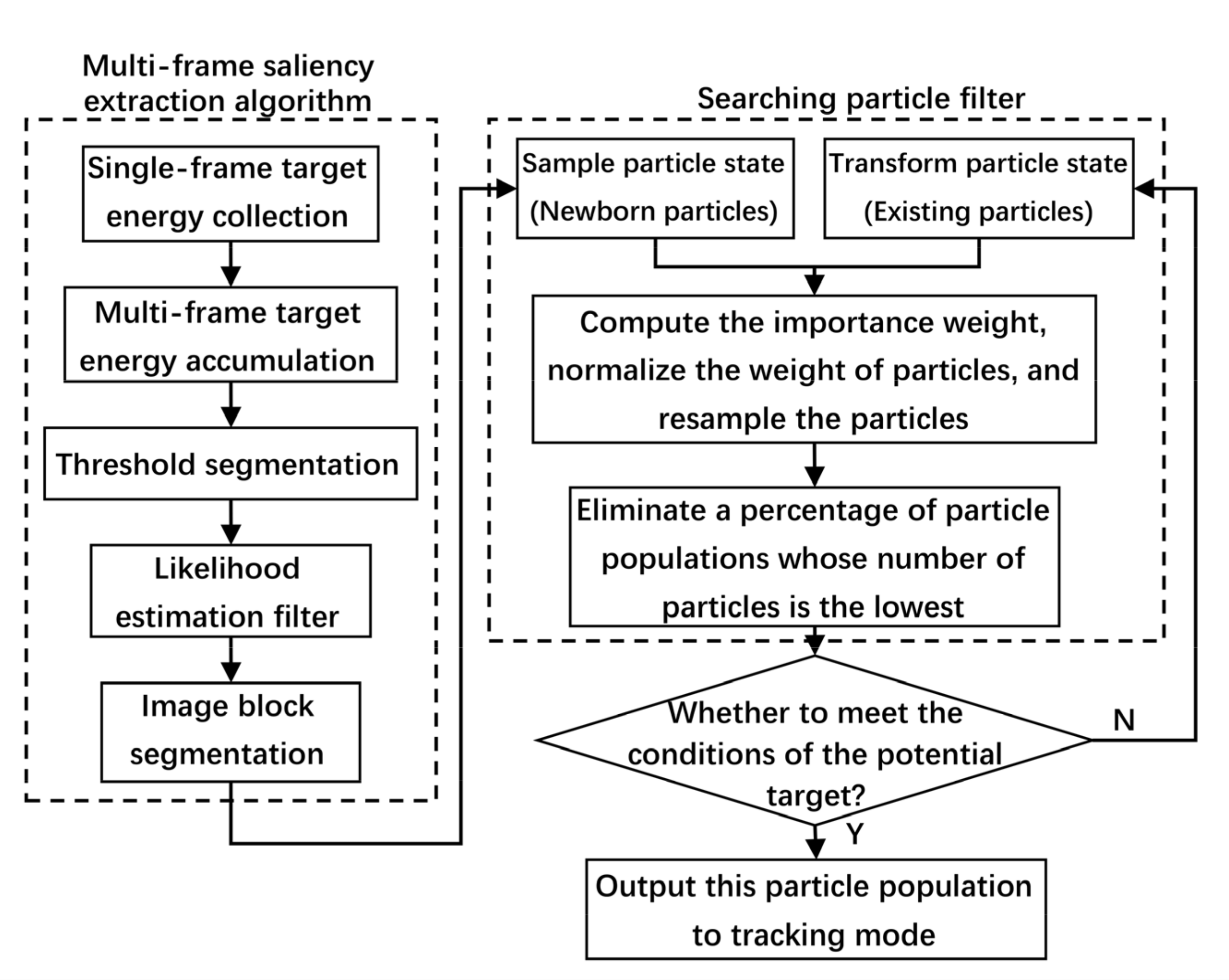
2.2. Searching Mode
- 1.
- The multi-frame saliency extraction algorithm
- 2.
- Searching particle filter
| Algorithm 1. Searching particle filter for a segmented image block. |
| Input: The normalize -th segmented saliency image block |
| Output: and The particle population that detects the potential target and the particles of this particle population |
| 1: Predict target existence variable using transitional probabilities of target |
| 2: Calculate the number of particles to be distributed using Equation (35) |
| 3: Distribute newborn particles and initial particles using Equations (34) and (36) |
| 4:for n = 1: N do |
| 5: if && do |
| 6: Transform the target state of particles using Equations (9) and (10) |
| 7: end if |
| 8: Evaluate importance weight using Equations (11) and (15) |
| 9:end for |
| 10: Normalize the weight of particles by Equation (16) |
| 11: Resample the particles using Equations (17) and (18) |
| 12: Sort the sum of particle number of particle populations in ascending order to get |
| 13: Stack to get using Equation (37) |
| 14:for p = 1: P do |
| 15: if do |
| 16: Eliminate this particle population and its particles |
| 17: P = P − 1 |
| 18: end if 19: if do |
| 20: Eliminate a part of particle of this particle population randomly 21: break |
| 22: end if 23: end for 24: for p = 1: P do |
| 25: Update the state vector using Equations (19) and (38). |
| 26: if and |
| 27: output and |
| 28: Eliminate this particle population and its particles |
| 29: end if |
| 30:end for |
| 31: Update the index image of particle population |
2.3. Tracking Mode
- 1.
- Tracking PF
- 2.
- Target confirmation algorithm
| Algorithm 2. Tracking particle filter for a potential target and target confirmation algorithm. |
| Input: and The particle population that detects the potential target and the particles of this particle population |
| Output: The path information of real target |
| 1: Predict target existence variable using transitional probabilities of target |
| 2: Distribute newborn particles by randomly copying other particles of same PP |
| 3:for n = 1: do |
| 4: if && do |
| 5: Transform the target state of particles using Equations (9) and (10) |
| 6: end if |
| 7: Evaluate importance weight using Equations (11) and (15) |
| 8:end for |
| 9: Normalize the weight of particles by Equation (16) |
| 10: Resample the particles using Equations (17) and (18) |
| 11: Estimate target state of this particle population by Equation (19) |
| 12: Save target state in path information as Equation (39) |
| 13: Calculate the confidence evaluation factors and using Equations (40)–(42) |
| 14: Update the confidence of the -th PP using Equation (43) |
| 15:ifdo |
| 16: Eliminate this particle population, its particles, and its path information |
| 17: return |
| 18:else if this particle population has been marked as real target |
| 19: Output the path information of this particle population |
| 20:end if |
| 21:ifdo |
| 22: +1 |
| 23: if do |
| 24: Mark this particle population as real target |
| 25: Output the path information of this particle population |
| 26: end if |
| 27:end if |
3. Experimental Result and Discussion
3.1. Experimental Setting
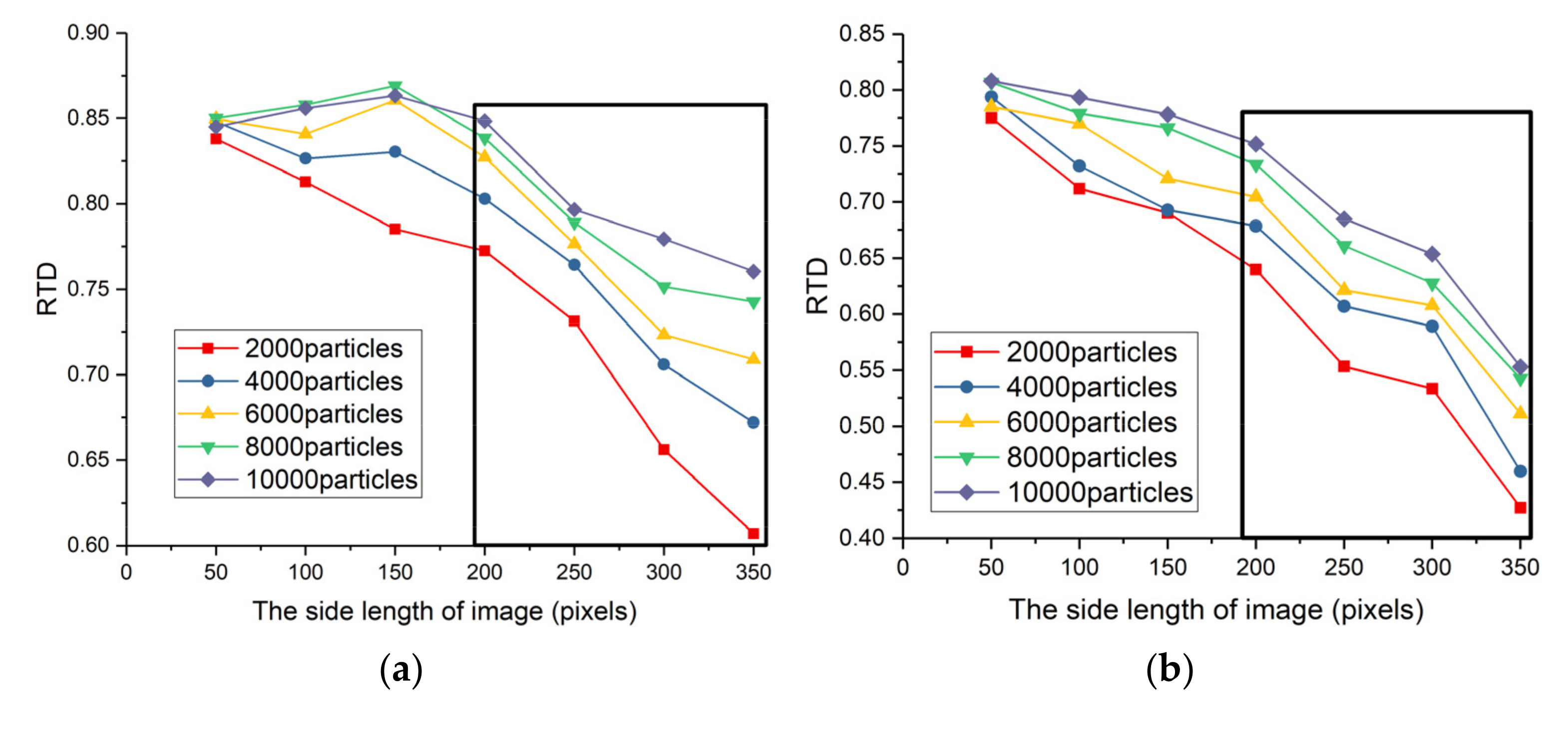
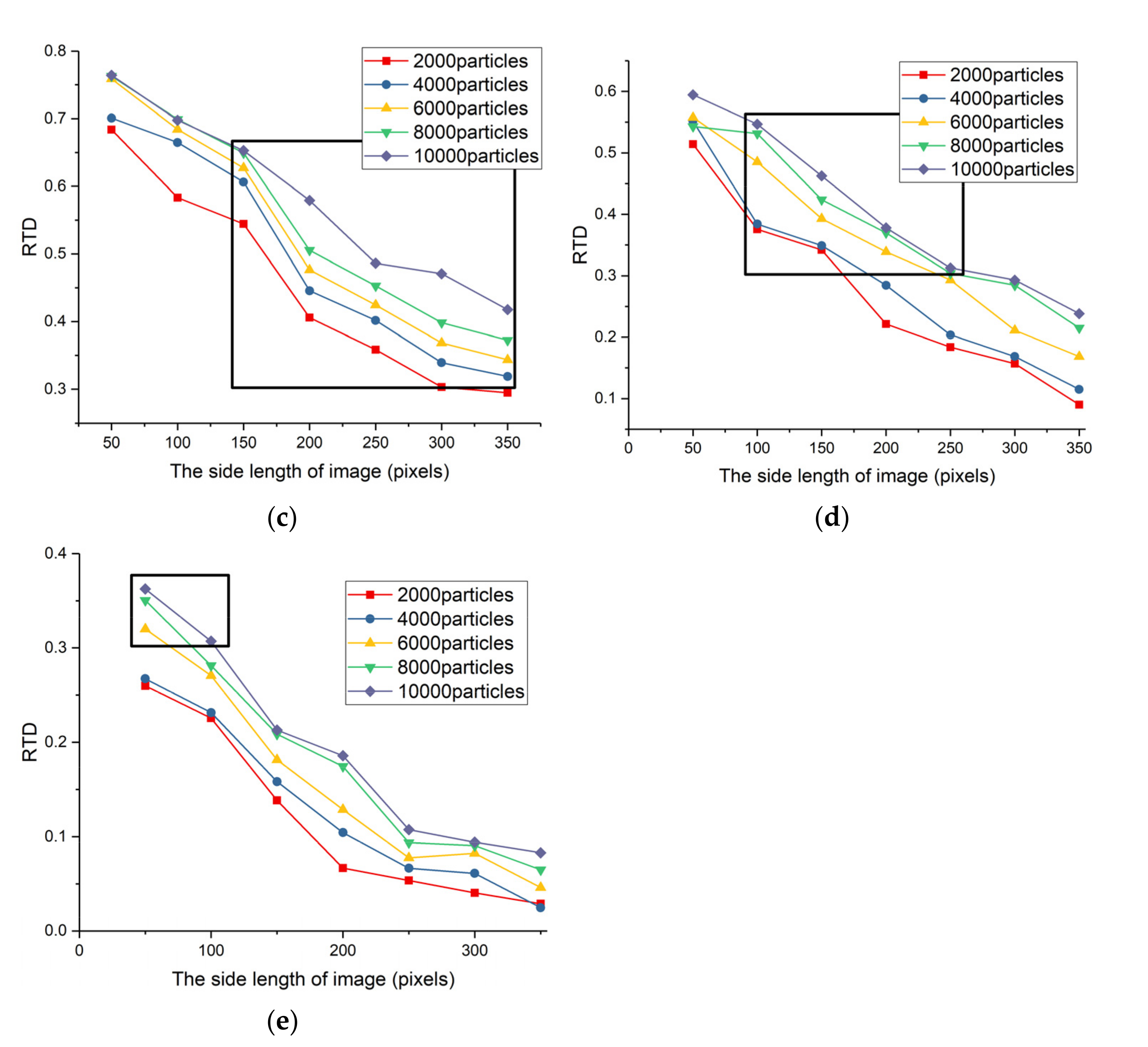
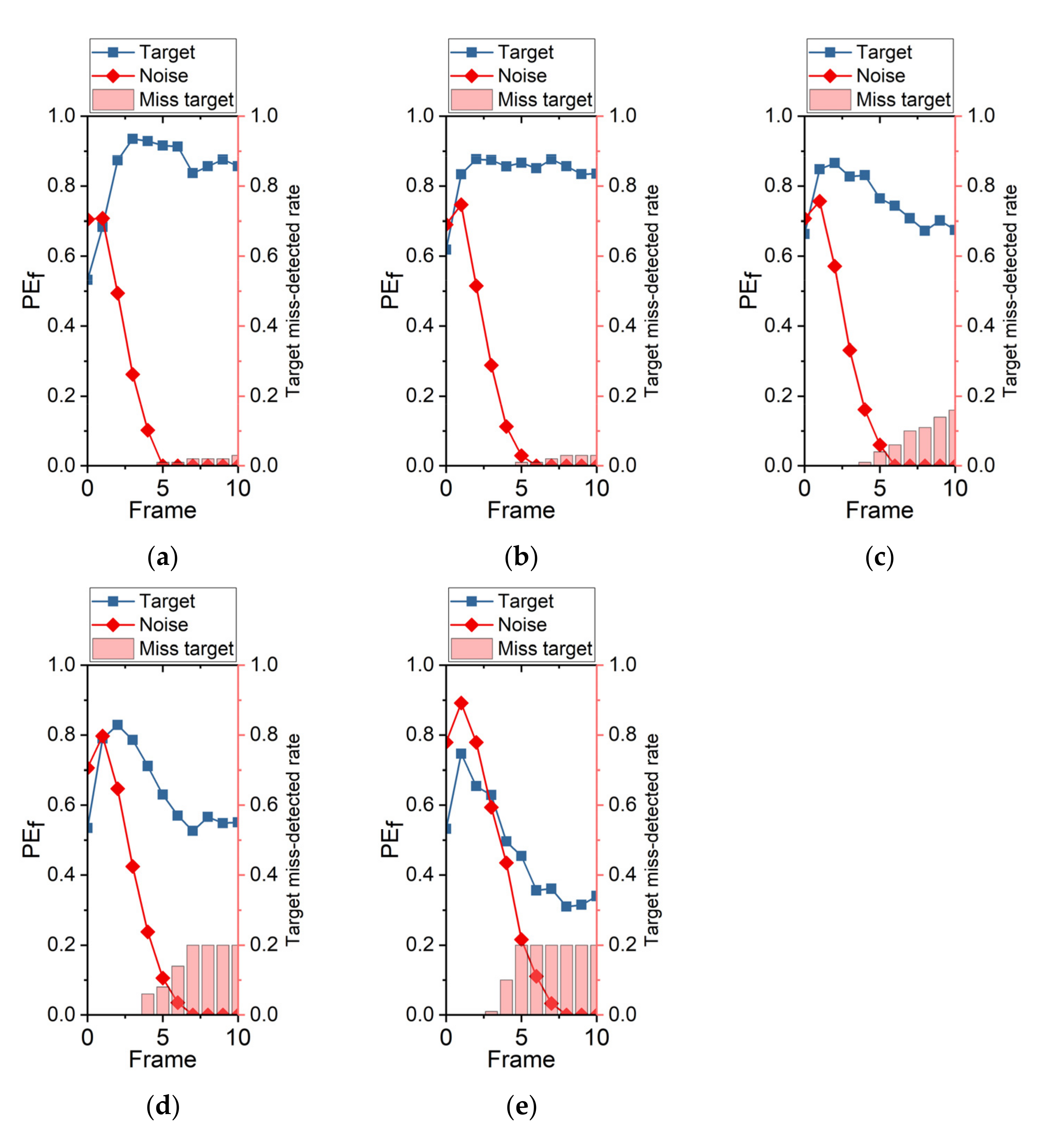
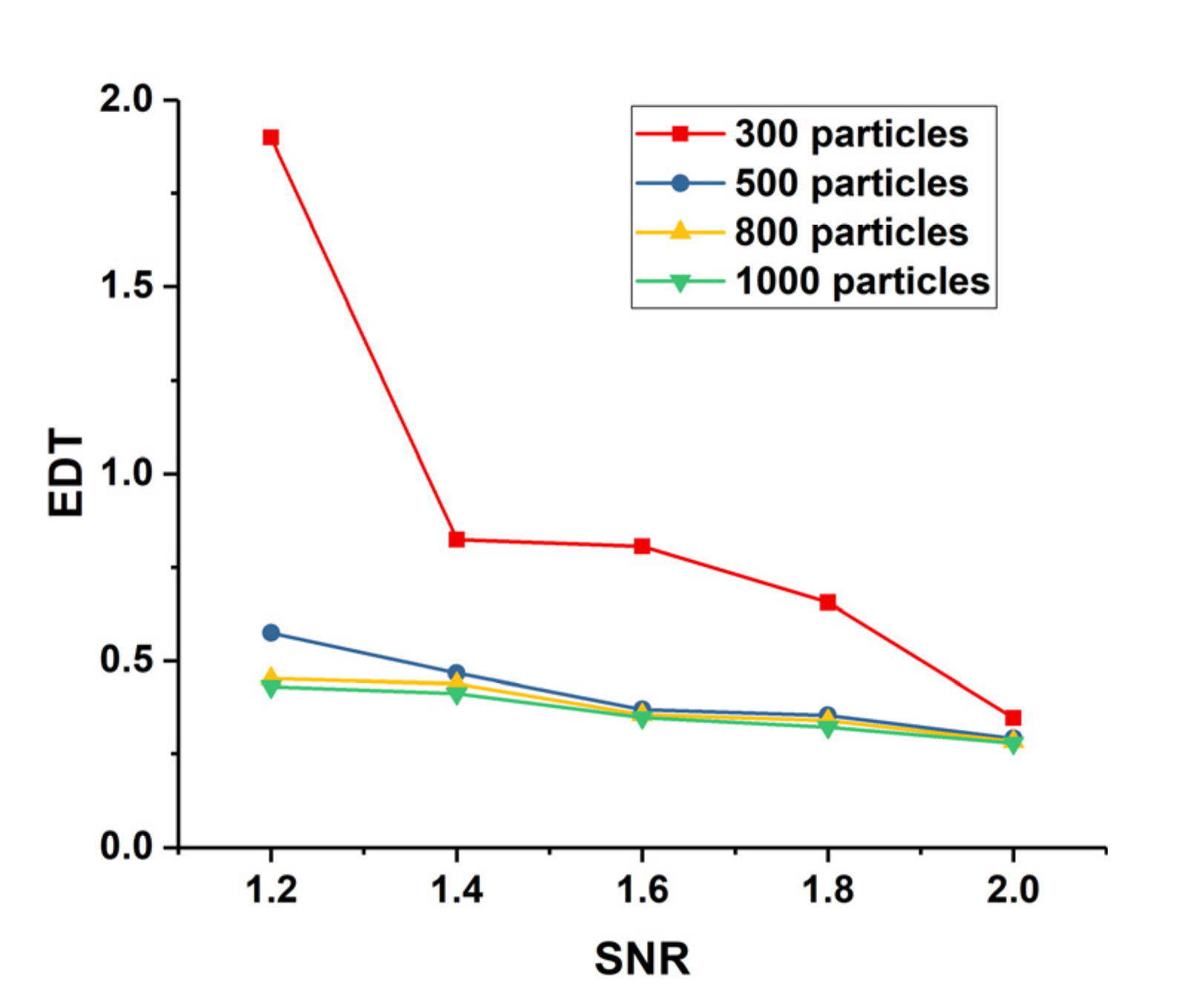
3.2. Parameters Analysis
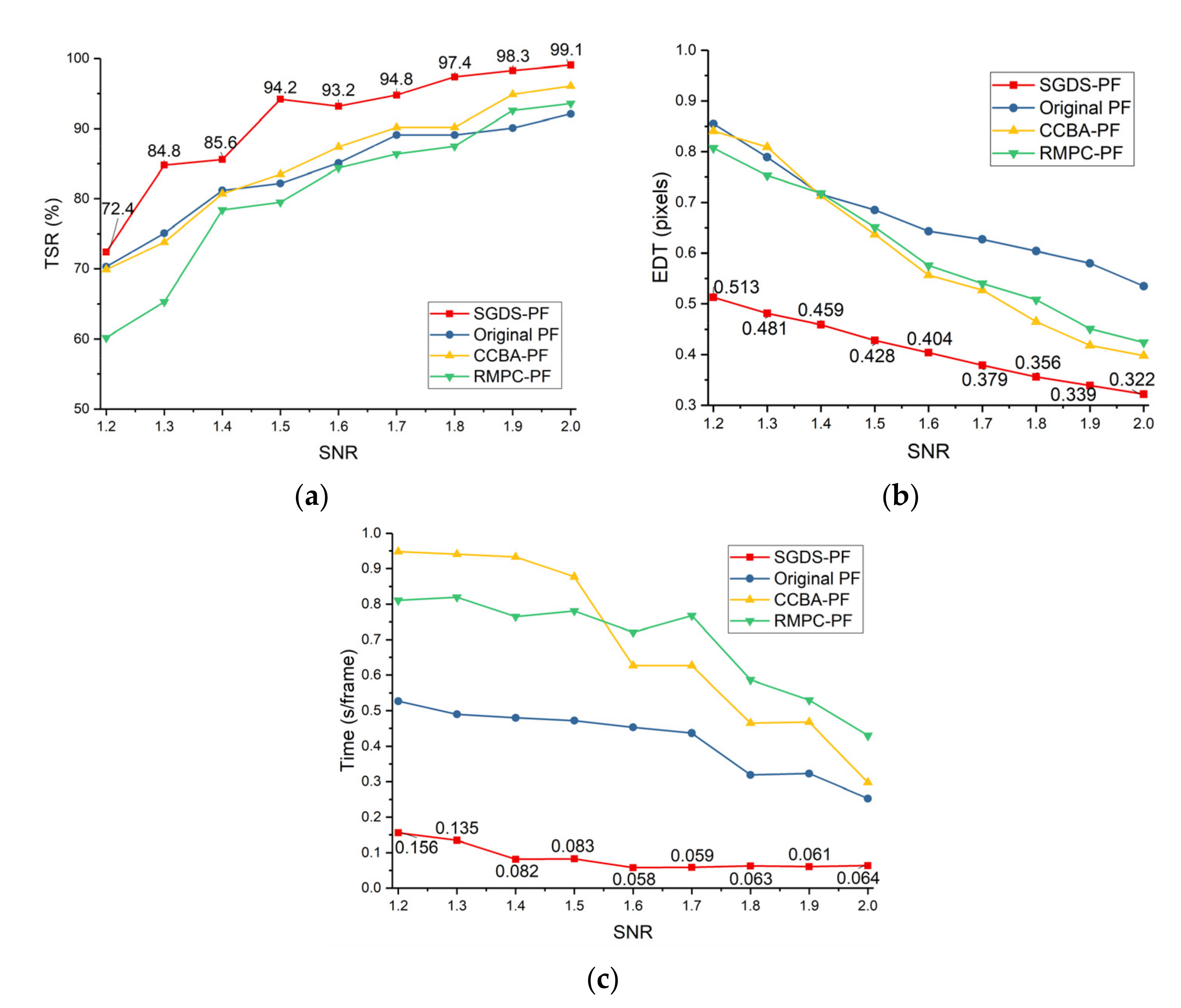
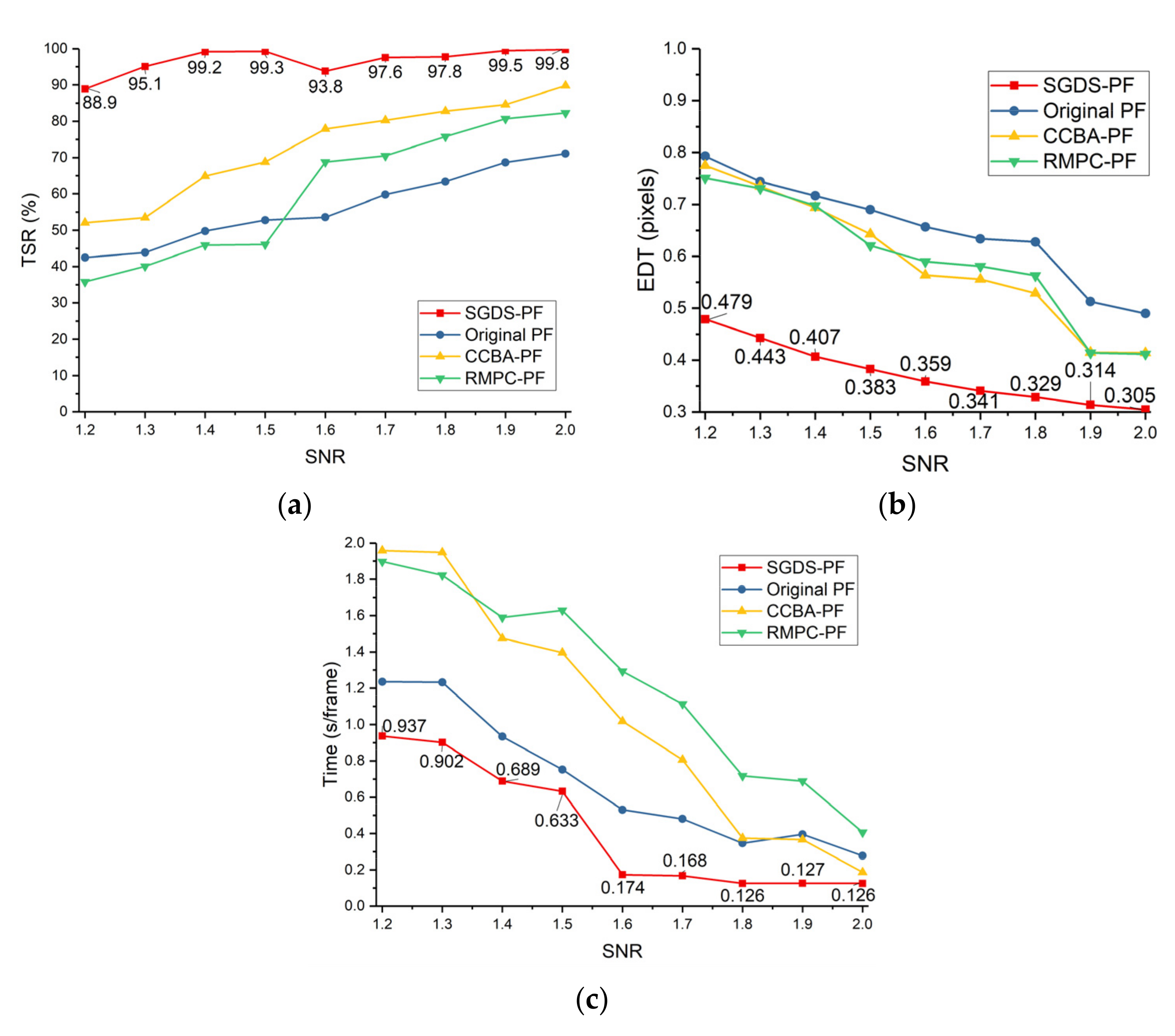
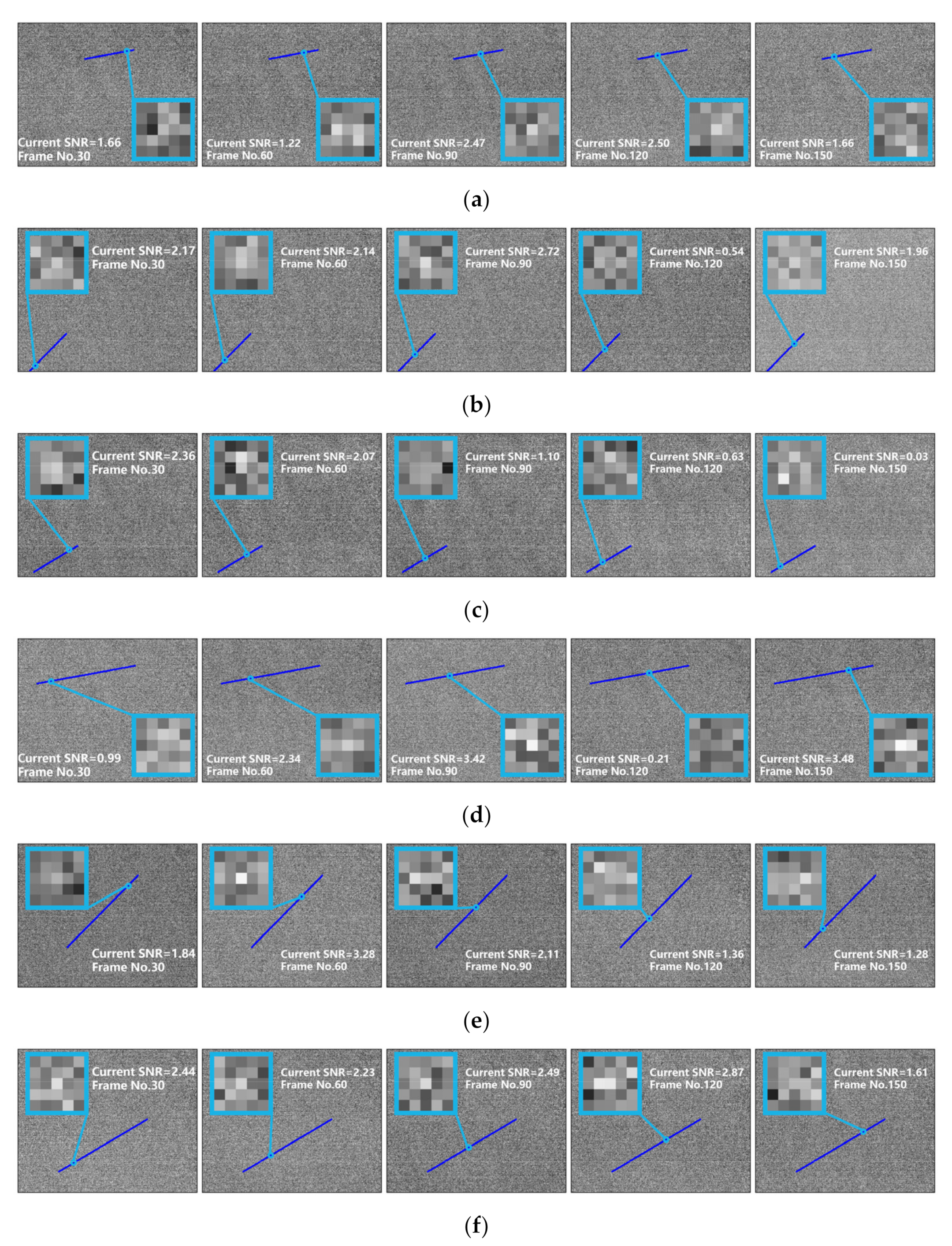
3.3. Experimental Result
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rawat, S.S.; Verma, S.K.; Kumar, Y. Review on recent development in infrared small target detection algorithms. Procedia Comput. Sci. 2020, 167, 2496–2505. [Google Scholar] [CrossRef]
- Shao, X.; Fan, H.; Lu, G.; Xu, J. An improved infrared dim and small target detection algorithm based on the contrast mechanism of human visual system. Infrared Phys. Technol. 2012, 55, 403–408. [Google Scholar] [CrossRef]
- Wang, X.; Peng, Z.; Kong, D.; He, Y. Infrared dim and small target detection based on stable multisubspace learning in heterogeneous scene. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5481–5493. [Google Scholar] [CrossRef]
- Wang, X.; Peng, Z.; Kong, D.; Zhang, P.; He, Y. Infrared dim target detection based on total variation regularization and principal component pursuit. Image Vis. Comput. 2017, 63, 1–9. [Google Scholar] [CrossRef]
- Wang, H.; Yang, F.; Zhang, C.; Ren, M. Infrared small target detection based on patch image model with local and global analysis. Int. J. Image Graph. 2018, 18, 19. [Google Scholar] [CrossRef]
- Pan, H.B.; Zhang, W.; Cong, M.Y. Detection algorithm for space dim moving object. In Proceedings of the Fundamental Problems of Optoelectronics and Microelectronics III, Harbin, China, 12–14 September 2006; SPIE: Bellingham, WA, USA, 2006. [Google Scholar]
- Li, M.; Peng, L.; Chen, Y.; Huang, S.; Qin, F.; Peng, Z. Mask sparse representation based on semantic features for thermal infrared target tracking. Remote Sens. 2019, 11, 1967. [Google Scholar] [CrossRef] [Green Version]
- Cao, Y.; Wang, G.; Yan, D.; Zhao, Z. Two algorithms for the detection and tracking of moving vehicle targets in aerial infrared image sequences. Remote Sens. 2016, 8, 28. [Google Scholar] [CrossRef] [Green Version]
- Kwan, C.; Budavari, B. Enhancing small moving target detection performance in low-quality and long-range infrared videos using optical flow techniques. Remote Sens. 2020, 12, 4024. [Google Scholar] [CrossRef]
- Cao, L.; Wan, C.; Zhang, Y.; Li, N. Infrared radiation characteristic measure method of point target. J. Infrared Millim Waves 2015, 34, 5. [Google Scholar] [CrossRef]
- Chen, C.L.P.; Li, H.; Wei, Y.; Xia, T.; Tang, Y.Y. A local contrast method for small infrared target detection. IEEE Trans. Geosci. Remote Sens. 2014, 52, 574–581. [Google Scholar] [CrossRef]
- Guan, X.; Zhang, L.; Huang, S.; Peng, Z. Infrared small target detection via non-convex tensor rank surrogate joint local contrast energy. Remote Sens. 2020, 12, 1520. [Google Scholar] [CrossRef]
- Wei, Y.; You, X.; Li, H. Multiscale patch-based contrast measure for small infrared target detection. Pattern Recognit. 2016, 58, 216–226. [Google Scholar] [CrossRef]
- Zhang, T.; Wu, H.; Liu, Y.; Peng, L.; Yang, C.; Peng, Z. Infrared small target detection based on non-convex optimization with Lp-norm constraint. Remote Sens. 2019, 11, 559. [Google Scholar] [CrossRef] [Green Version]
- Bai, X.; Zhou, F.; Jin, T. Enhancement of dim small target through modified top-hat transformation under the condition of heavy clutter. Signal Processing 2010, 90, 1643–1654. [Google Scholar] [CrossRef]
- Wan, M.J.; Gu, G.H.; Cao, E.C.; Hu, X.B.; Qian, W.X.; Ren, K. In-frame and inter-frame information based infrared moving small target detection under complex cloud backgrounds. Infrared Phys. Technol. 2016, 76, 455–467. [Google Scholar] [CrossRef]
- Bai, X.; Bi, Y. Derivative entropy-based contrast measure for infrared small-target detection. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2452–2466. [Google Scholar] [CrossRef]
- Lv, P.; Sun, S.; Lin, C.; Liu, G. A method for weak target detection based on human visual contrast mechanism. IEEE Geosci. Remote Sens. Lett. 2019, 16, 261–265. [Google Scholar] [CrossRef]
- Xia, C.; Li, X.; Zhao, L.; Shu, R. Infrared small target detection based on multiscale local contrast measure using local energy factor. IEEE Geosci. Remote Sens. Lett. 2020, 17, 157–161. [Google Scholar] [CrossRef]
- He, Y.; Li, M.; Zhang, J.; An, Q. Small infrared target detection based on low-rank and sparse representation. Infrared Phys. Technol. 2015, 68, 98–109. [Google Scholar] [CrossRef]
- Zhang, L.; Peng, L.; Zhang, T.; Cao, S.; Peng, Z. Infrared small target detection via non-convex rank approximation minimizationjoint l2,1 norm. Remote Sens. 2018, 10, 1821. [Google Scholar] [CrossRef] [Green Version]
- Reed, I.S.; Gagliardi, R.M.; Stotts, L.B. Optical moving target detection with 3-D matched filtering. IEEE Trans. Aerosp. Electron. Syst. 1988, 24, 327–336. [Google Scholar] [CrossRef]
- Reed, I.S.; Gagliardi, R.M.; Stotts, L.B. A recursive moving-target-indication algorithm for optical image sequences. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 434–440. [Google Scholar] [CrossRef]
- Wang, H.; Qi-Feng, Y.; Zhi-Hui, L.; Xiao-Chun, L. A block-based improved recursive moving-target-indication algorithm. Acta Phys. Sin. 2014, 63, 13. [Google Scholar] [CrossRef]
- Liu, H.; Rosenfeld, A.; Bhattacharya, P. Hough-transform detection of lines in 3-D space. Pattern Recognit. Lett. 2000, 21, 843–849. [Google Scholar]
- Kultanen, P.; Xu, L.; Oja, E. Randomized Hough transform (RHT). In Proceedings of the [1990] Proceedings, 10th International Conference on Pattern Recognition, Atlantic City, NJ, USA, 16–21 June 1990; Volume 631, pp. 631–635. [Google Scholar]
- Barniv, Y. Dynamic Programming Solution for Detecting Dim Moving Targets. IEEE Trans. Aerosp. Electron. Syst. 1985, AES-21, 144–156. [Google Scholar] [CrossRef]
- Sun, X.; Liu, X.; Tang, Z.; Long, G.; Yu, Q. Real-time visual enhancement for infrared small dim targets in video. Infrared Phys. Technol. 2017, 83, 217–226. [Google Scholar] [CrossRef]
- Wang, Z.; Mo, C.; Dai, H. Target detection method before tracking based on particle filter. Procedia Comput. Sci. 2017, 107, 141–147. [Google Scholar] [CrossRef]
- Long, Y.; Xu, H.; An, W.; Liu, L. Track-before-detect for infrared maneuvering dim multi-target via MM-PHD. Chin. J. Aeronaut. 2012, 25, 252–261. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Liu, D.; Lei, B.; Liang, J.; Ji, R. An intelligent particle filter with resampling of multi-population cooperation. Digit. Signal Processing 2021, 115, 103084. [Google Scholar] [CrossRef]
- Jia-qiang, L.; Rong-hua, Z.; Jin-li, C.; Chun-yan, Z.; Yan-ping, Z. Target tracking algorithm based on adaptive strong tracking particle filter. IET Sci. Meas. Technol. 2016, 10, 704–710. [Google Scholar] [CrossRef]
- Garcia-Fernandez, A.F.; Grajal, J.; Morelande, M.R. Two-Layer Particle Filter for Multiple Target Detection and Tracking. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1569–1588. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Tian, M.; Bo, Y.; Ling, X. Improved infrared small target detection and tracking method based on new intelligence particle filter. Comput. Intell. 2018, 34, 917–938. [Google Scholar] [CrossRef]
- Chen, Z.; Tian, M.; Bo, Y.; Ling, X. Infrared small target detection and tracking algorithm based on new closed-loop control particle filter. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 1435–1456. [Google Scholar] [CrossRef]
- Hu, Z.; Su, Y. Infrared target tracking based on improved particle filtering. Int. J. Pattern Recognit. Artif. Intell. 2021, 35, 2154015. [Google Scholar] [CrossRef]
- Havangi, R. Target tracking based on improved unscented particle filter with Markov Chain Monte Carlo. IETE J. Res. 2018, 64, 873–885. [Google Scholar] [CrossRef]
- Wang, F.; Zhen, Y.; Zhong, B.; Ji, R. Robust infrared target tracking based on particle filter with embedded saliency detection. Inf. Sci. 2015, 301, 215–226. [Google Scholar] [CrossRef]
- Kong, X.; Chen, Q.; Gu, G.; Qian, W.; Ren, K.; Williams, J. Particle filter-based modulation domain infrared targets tracking. Opt. Quantum Electron. 2018, 51, 13. [Google Scholar] [CrossRef]
- Zhang, X.; Ren, K.; Wan, M.; Gu, G.; Chen, Q. Infrared small target tracking based on sample constrained particle filtering and sparse representation. Infrared Phys. Technol. 2017, 87, 72–82. [Google Scholar] [CrossRef]
- Ristic, B.; Arulampalam, S.; Gordon, N. Detection and tracking of stealthy targets. In Beyond the Kalman Filter Particle Filters for Tracking Applications; Barton, D.K., Ed.; Artech House: Boston, MA, USA; London, UK, 2004; pp. 240–251. [Google Scholar]
- Qiu, Z.; Qian, H. Adaptive genetic particle filter and its application to attitude estimation system. Digit. Signal Process. 2018, 81, 163–172. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Format | 320 × 256 |
| Pixel pitch | 30 μm |
| Spectral Range | 8–12 μm |
| F-number | 2.0 |
| Noise Equivalent Temperature Difference (NETD) | 30 mk |
| Framerate | 30 Hz |
| Bits per pixel | 14 bits |
| SNR | |||||
| 200~350 | 200~350 | 150~350 | 100~250 | 50~100 | |
| 2000~6000 | 2000~6000 | 2000~6000 | 6000~10,000 | 6000~10,000 | |
| 0.1 | 0.1 | 0.1 | 0.2 | 0.2 | |
| 5 | 5 | 5 | 4 | 4 | |
| 500 | |||||
| 0.6~0.8 | 0.4~0.6 | 0.4~0.6 | 0.2~0.4 | 0.1~0.12 | |
| 10~9 | 10~9 | 9~7 | 8~6 | 6~4 | |
| Compared Methods | Image Size | SNR | ||||
|---|---|---|---|---|---|---|
| Original PF | 50 × 50 | PN:10,000 | PN:14,000 | PN:18,000 | PN:24,000 | PN:30,000 |
| 200 × 200 | PN:14,000 | PN:20,000 | PN:25,000 | PN:30,000 | PN:60,000 | |
| CCBA-PF | 50 × 50 | PN:500 UIN:40 | PN:800 UIN:40 | PN:1100 UIN:40 | PN:1500 UIN:40 | PN:2000 UIN:40 |
| 200 × 200 | PN:500 UIN:80 | PN:1000 UIN:80 | PN:1800 UIN:80 | PN:2700 UIN:80 | PN:4000 UIN:80 | |
| RMPC-PF | 50 × 50 | PN:6000 PPN:3 | PN:10,000 PPN:3 | PN:14,000 PPN:3 | PN:16,000 PPN:3 | PN:18,000 PPN:3 |
| 200 × 200 | PN:6000 PPN:5 | PN:10,000 PPN:5 | PN:14,000 PPN:5 | PN:18,000 PPN:5 | PN:24,000 PPN:5 | |
| DSR (%) | Time (s/f) | SGDS-PF | Original PF | CCBA-PF | RMPC-PF | ||||
|---|---|---|---|---|---|---|---|---|---|
| SNR = 2 | Seq.1 | 63.0 | 0.165 | 0 | 1.200 | 26.0 | 1.687 | 3.0 | 1.698 |
| Seq.2 | 87.4 | 0.156 | 78.9 | 1.159 | 83.7 | 1.712 | 66.8 | 1.723 | |
| Seq.3 | 91.5 | 0.149 | 0 | 1.211 | 5.5 | 1.684 | 6.0 | 1.743 | |
| Seq.4 | 74.0 | 0.144 | 0 | 1.109 | 3.5 | 1.657 | 0.5 | 1.687 | |
| Seq.5 | 89.5 | 0.146 | 86 | 1.257 | 73.0 | 1.738 | 84.5 | 1.750 | |
| Seq.6 | 81.5 | 0.150 | 76.5 | 1.186 | 10.5 | 1.708 | 39.5 | 1.645 | |
| SNR = 1.6 | Seq.1 | 65 | 0.446 | 0 | 1.884 | 1.0 | 3.318 | 0.5 | 3.121 |
| Seq.2 | 83.7 | 0.454 | 0 | 1.823 | 7.4 | 3.360 | 0.5 | 3.014 | |
| Seq.3 | 82.5 | 0.436 | 1.5 | 1.908 | 0 | 3.298 | 0 | 3.200 | |
| Seq.4 | 40.0 | 0.427 | 0 | 1.837 | 0 | 3.259 | 0 | 2.989 | |
| Seq.5 | 77.5 | 0.437 | 77.0 | 1.917 | 73.0 | 3.246 | 60.5 | 3.059 | |
| Seq.6 | 75.5 | 0.435 | 0 | 1.857 | 0.5 | 3.354 | 0.5 | 3.078 | |
| SNR = 1.2 | Seq.1 | 0 | 1.059 | 0 | 2.169 | 1.0 | 5.168 | 0.5 | 6.678 |
| Seq.2 | 0 | 1.104 | 0 | 2.213 | 0 | 5.218 | 1.6 | 6.753 | |
| Seq.3 | 91.5 | 1.062 | 0.5 | 2.202 | 0 | 5.239 | 0 | 6.879 | |
| Seq.4 | 0 | 1.070 | 0 | 2.187 | 0.5 | 5.173 | 0 | 6.701 | |
| Seq.5 | 0 | 1.078 | 0 | 2.158 | 0.5 | 5.210 | 0 | 6.698 | |
| Seq.6 | 76.5 | 1.017 | 64.5 | 2.189 | 66.5 | 5.187 | 68.0 | 6.715 | |
| Compared Methods | SNR | |||||
|---|---|---|---|---|---|---|
| 2 | 1.6 | 1.2 | ||||
| Original PF | PN:40,000 | PN:82,000 | PN:123,000 | |||
| CCBA-PF | PN:4100 | UIN:80 | PN:8200 | UIN:100 | PN:12,000 | UIN:120 |
| RMPC-PF | PN:12,000 | PPN:6 | PN:41,000 | PPN:6 | PN:60,000 | PPN:6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, L.; Rao, P.; Zhang, Y.; Su, Y.; Chen, X. Low-SNR Infrared Point Target Detection and Tracking via Saliency-Guided Double-Stage Particle Filter. Sensors 2022, 22, 2791. https://doi.org/10.3390/s22072791
Jia L, Rao P, Zhang Y, Su Y, Chen X. Low-SNR Infrared Point Target Detection and Tracking via Saliency-Guided Double-Stage Particle Filter. Sensors. 2022; 22(7):2791. https://doi.org/10.3390/s22072791
Chicago/Turabian StyleJia, Liangjie, Peng Rao, Yuke Zhang, Yueqi Su, and Xin Chen. 2022. "Low-SNR Infrared Point Target Detection and Tracking via Saliency-Guided Double-Stage Particle Filter" Sensors 22, no. 7: 2791. https://doi.org/10.3390/s22072791
APA StyleJia, L., Rao, P., Zhang, Y., Su, Y., & Chen, X. (2022). Low-SNR Infrared Point Target Detection and Tracking via Saliency-Guided Double-Stage Particle Filter. Sensors, 22(7), 2791. https://doi.org/10.3390/s22072791