
An Efficient Defocus Blur Segmentation Scheme Based on Hybrid LTP and PCNN

 ,
,  , , ,
, , ,  and
and
Abstract
:1. Introduction
- We proposed a novel and simple yet effective hybrid scheme by adopting a sharpness-based descriptor known as Local Ternary Patterns (LTP) and a pulse synchronization technique called Pulse Coupled Neural Network (PCNN) for addressing the defocus blur segmentation limitations. Moreover, the threshold-based positive values are the prerequisite for the region extraction process in defocus blur segmentation.
- The LTP-based sharpness metric is applied instead of the LBP descriptor (prone to noisy background and blur regions) for accurate extraction of partially blur regions by estimating the blur area in defocus blur images.
- Next, the Pulse Coupled Neural Network algorithm uses the neuron-firing sequence phenomena after the region extraction that consists of the pixel feature details, i.e., edges, texture, and region, which are used for a noticeable out-of-focused region segmentation using the de-blur image features.
- The experimental results are evidence that the proposed blur-measure produces promising results while using limited computation time and processing in various de-blur environments.
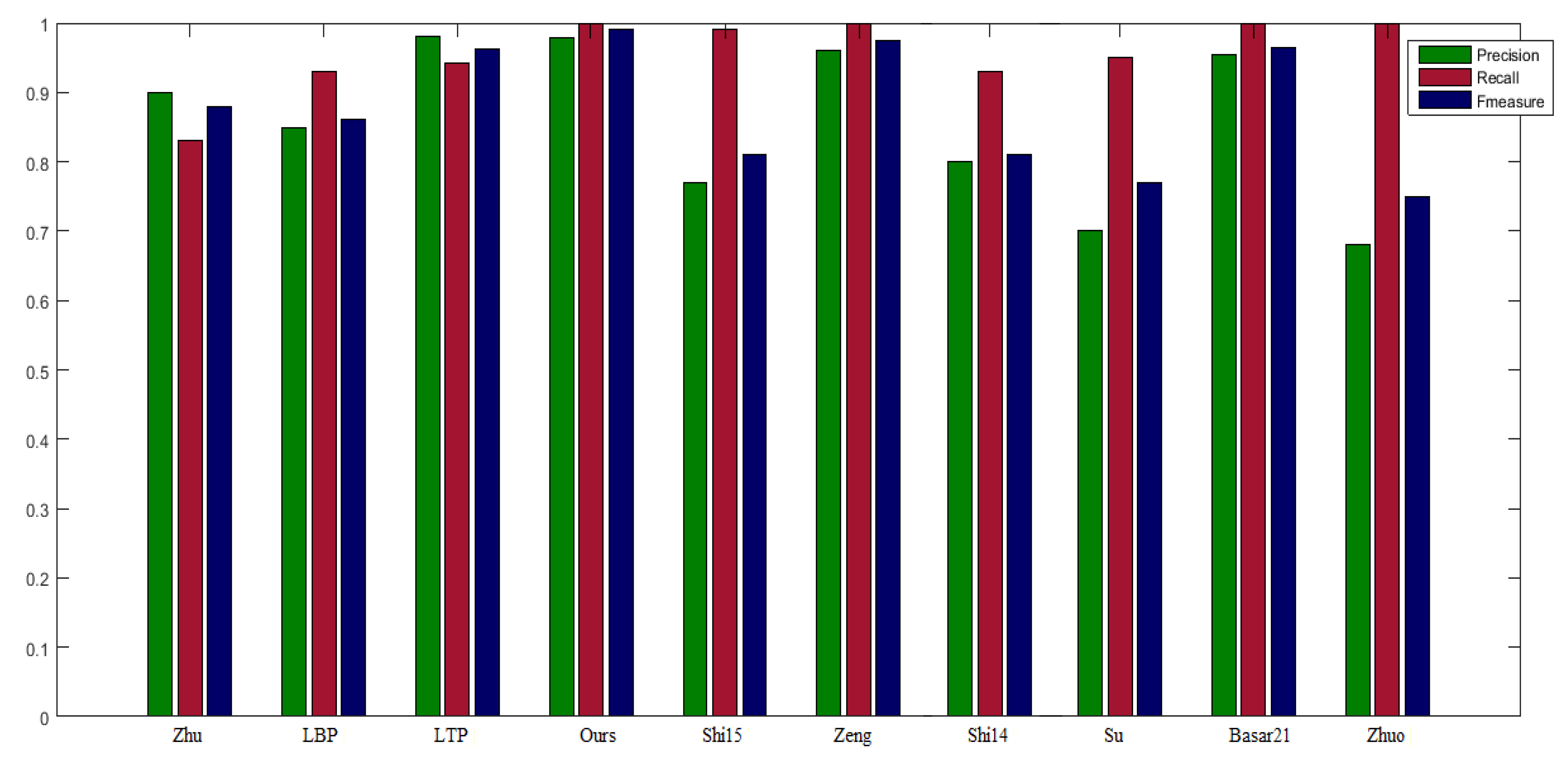
- To estimate the ranking of the referenced and proposed schemes using the appraisal scores calculated for the defocus blur segmentation using fuzzy logic-based EDAS approach for different performance metrics including precision and recall, and F1 measure.
Paper Organization
2. Literature Review
2.1. Defocused Blur Image Segmentation and PCNN Technique
2.2. Local Patterns Based Segmentation and EDAS Approach
2.2.1. Local Binary Pattern (LBP)
2.2.2. Local Ternary Pattern (LTP)
2.2.3. EDAS Scheme
3. Method and Evaluation
3.1. Proposed Algorithm
3.1.1. Algorithm Description
| Algorithm 1: Defocus Blur Segmentation Map. |
Let Input Image Defocus is represented by and Output resultant segmented image is represented by IR
|
3.1.2. Image Pre-Processing
3.1.3. LTP Mask Based Sharpness Production
3.1.4. Out-of-Focused Estimation
3.1.5. PCNN Scheme
4. Defocus-Blur Segmentation Evaluation
4.1. Evaluation
4.1.1. Precision and Recall
4.1.2. Accuracy
4.1.3. F1 Measure
4.1.4. Matthew’s Correlation-Coefficient (MCC)
4.1.5. Jaccard-Coefficient Measure (JCM)
4.1.6. Dice-Similarity-Coefficient (DSC)
4.1.7. Specificity
4.2. Ranking Evaluation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approaches | Ranking | |||||
|---|---|---|---|---|---|---|
| Zhu [19] | 0.0329 | 0.0586 | 0.2114 | 0.4058 | 0.3086 | 6 |
| Shi15 [14] | 0.1150 | 0.0079 | 0.7389 | 0.9192 | 0.8291 | 2 |
| Shi14 [16] | 0.0703 | 0 | 0.4520 | 1 | 0.7260 | 4 |
| Su [17] | 0.0934 | 0 | 0.6002 | 1 | 0.8001 | 3 |
| Zhuo [18] | 0.1557 | 0.0083 | 1 | 0.9149 | 0.9574 | 1 |
| Zeng [23] | 0 | 0.0968 | 0 | 0.0179 | 0.0089 | 9 |
| LBP [20] | 0.0111 | 0 | 0.0714 | 1 | 0.5357 | 5 |
| LTP [22] | 0.0039 | 0.0940 | 0.0251 | 0.0466 | 0.0358 | 8 |
| Basar21 [21] | 0 | 0.0897 | 0 | 0.0905 | 0.0452 | 7 |
| Ours | 0 | 0.0986 | 0 | 0 | 0 | 10 |
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Graf, F.; Kriegel, H.-P.; Weiler, M. Robust image segmentation in low depth of field images. arXiv 2013, arXiv:1302.3900. [Google Scholar]
- Fergus, R.; Singh, B.; Hertzmann, A.; Roweis, S.T.; Freeman, W.T. Removing camera shake from a single photograph. ACM Trans. Graph. 2006, 25, 787–794. [Google Scholar] [CrossRef]
- Shan, Q.; Jia, J.; Agarwala, A. High-quality motion deblurring from a single image. ACM Trans. Graph. 2008, 27, 1–10. [Google Scholar]
- Krishnan, D.; Tay, T.; Fergus, R. Blind deconvolution using a normalized sparsity measure. In Proceedings of the CVPR 2011, Colorado Springs, CO, USA, 20–25 June 2011; pp. 233–240. [Google Scholar] [CrossRef]
- Levin, A.; Weiss, Y.; Durand, F.; Freeman, W.T. Efficient marginal likelihood optimization in blind deconvolution. In Proceedings of the CVPR 2011, Colorado Springs, CO, USA, 20–25 June 2011; pp. 2657–2664. [Google Scholar] [CrossRef] [Green Version]
- Levin, A.; Weiss, Y.; Durand, F.; Freeman, W.T. Understanding and evaluating blind deconvolution algorithms. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 1964–1971. [Google Scholar] [CrossRef]
- Krishnan, D.; Fergus, R. Fast image deconvolution using hyper Laplacian priors. In Proceedings of the Neural Information Pro-Cessing Systems Conference 2009, Vancouver, BC, Canada, 7–10 December 2009; Volume 22, pp. 1033–1041. [Google Scholar]
- Trussell, H.; Hunt, B. Image restoration of space variant blursby sectioned methods. In Proceedings of the ICASSP ’78, IEEE International Conference on Acoustics, Speech, and Signal Processing, Tulsa, OK, USA, 10–12 April 1978; Volume 3, pp. 196–198. [Google Scholar] [CrossRef]
- Adorf, H.-M. Towards HST restoration with a space-variant PSF, cosmicrays and other missing data. In The Restoration of HST Images and Spectra-II; Space Telescope Science Institute: Baltimore, MD, USA, 1994; p. 72. [Google Scholar]
- Bardsley, J.; Jefferies, S.; Nagy, J.; Plemmons, R. A computational method for the restoration of images with an unknown, spatially-varying blur. Opt. Exp. 2006, 14, 1767–1782. [Google Scholar] [CrossRef] [PubMed]
- Bae, S.; Durand, F. Defocus magnification. Comput. Graph. Forum 2007, 26, 571–579. [Google Scholar] [CrossRef]
- Shi, J.; Xu, L.; Jia, J. Blur Detection Dataset; IEEE Computer Society: Washington, DC, USA, 2014. [Google Scholar]
- Shen, J.; Han, L.; Xu, M.; Huang, C.; Zhang, Z.; Wang, H. Focused region segmentation for refocusing images from light fields. J. Signal Process. Syst. 2018, 90, 1281–1293. [Google Scholar] [CrossRef]
- Shi, J.; Xu, L.; Jia, J. Just noticeable defocus blur detection and estimation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 657–665. [Google Scholar]
- Vu, C.T.; Phan, T.D.; Chandler, D.M. S3: A spectral and spatial measure of local perceived sharpness in natural images. IEEE Trans. Image Process. 2011, 21, 934–945. [Google Scholar] [CrossRef]
- Shi, J.; Xu, L.; Jia, J. Discriminative blur detection features. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition 2014, Washington, DC, USA, 23–28 June 2014; pp. 2965–2972. [Google Scholar]
- Su, B.; Lu, S.; Tan, C.L. Blurred image region detection and classification. In Proceedings of the 19th ACM International Conference on Multimedia, Scottsdale, AZ, USA, 28 November–1 December 2011; pp. 1397–1400. [Google Scholar] [CrossRef]
- Zhuo, S.; Sim, T. Defocus map estimation from a single image. Pattern Recognit. 2011, 44, 1852–1858. [Google Scholar] [CrossRef]
- Zhu, X.; Cohen, S.; Schiller, S.; Milanfar, P. Estimating spatially varying defocus blur from a single image. IEEE Trans. Image Process. 2013, 22, 4879–4891. [Google Scholar] [CrossRef] [Green Version]
- Yi, X.; Eramian, M. LBP-based segmentation of defocus blur. IEEE Trans. Image Process. 2016, 25, 1626–1638. [Google Scholar] [CrossRef]
- Basar, S.; Ali, M.; Ochoa-Ruiz, G.; Waheed, A.; Rodriguez-Hernandez, G.; Zareei, M. A Novel Defocused Image Segmentation Method Based on PCNN and LBP. IEEE Access 2021, 9, 87219–87240. [Google Scholar] [CrossRef]
- Srivastava, P.; Binh, N.T.; Khare, A. Content-Based Image Retrieval Using Moments of Local Ternary Pattern. Mob. Netw. Appl. 2014, 19, 618–625. [Google Scholar] [CrossRef]
- Zeng, K.; Wang, Y.; Mao, J.; Liu, J.; Peng, W.; Chen, N. A Local Metric for Defocus Blur Detection Based on CNN Feature Learning. IEEE Trans. Image Process. 2019, 28, 2107–2115. [Google Scholar] [CrossRef] [PubMed]
- Duc, D.A.; Van, L.H.; Yu, V.F.; Chou, S.-Y.; Hien, N.V.; Chi, N.T.; Toan, D.V.; Dat, L.Q. A dynamic generalized fuzzy multi-criteria croup decision-making approach for green supplier segmentation. PLoS ONE 2021, 16, e0245187. [Google Scholar] [CrossRef] [PubMed]
- Singh, M. Enhanced image segmentation using fuzzy logic. Int. J. Electron. Comput. Sci. Eng. 2013, 2, 933–940. [Google Scholar]
- Ghorabaee, M.K.; Zavadskas, E.K.; Olfat, L.; Turskis, Z. Multi-criteria inventory classification using a new method of evaluation based on distance from average solution (EDAS). Informatica 2015, 26, 435–451. [Google Scholar] [CrossRef]
- Fan, J.-P.; Li, Y.-J.; Wu, M.-Q. Technology selection based on EDAS cross-efficiency evaluation method. IEEE Access 2019, 7, 58974–58980. [Google Scholar] [CrossRef]
- Adams, A. The New Ansel Adams Photography Series; New York Graphic Society: New York, NY, USA, 1980. [Google Scholar]
- Wang, J.Z.; Li, J.; Gray, R.M.; Wiederhold, G. Unsupervised multiresolution segmentation for images with low depth of field. IEEE Trans. Pattern Anal. Mach. Intell. 2001, 23, 85–90. [Google Scholar] [CrossRef]
- Tsai, D.-M.; Wang, H.-J. Segmenting focused objects in complex visual images. Pattern Recognit. Lett. 1998, 19, 929–940. [Google Scholar] [CrossRef]
- Gai, K.; Qiu, M. Blend arithmetic operations on tensor-based fully homomorphic encryption over real numbers. IEEE Trans. Ind. Informat. 2018, 14, 3590–3598. [Google Scholar] [CrossRef]
- Won, C.S.; Pyun, K.; Gray, R.M. Automatic object segmentation in images with low depth of field. In Proceedings of the International Conference on Image Processing, Rochester, NY, USA, 22–25 September 2002; Volume 3, pp. 805–808. [Google Scholar] [CrossRef]
- Li, H.; Ngan, K.N. Unsupervized video segmentation with low depth of field. IEEE Trans. Circuits Syst. Video Technol. 2007, 17, 1742–1751. [Google Scholar]
- Deng, X.-L.; Ni, J.-Q.; Li, Z.; Dai, F. Foreground extraction from low depth-of-field images based on colour-texture and HOS features. Acta Autom. Sin. 2014, 39, 846–851. [Google Scholar] [CrossRef]
- Shen, A.; Dong, H.; Wang, K.; Kong, Y.; Wu, J.; Shu, H. Automatic extraction of blur regions on a single image based on semantic segmentation. IEEE Access 2020, 8, 44867–44878. [Google Scholar] [CrossRef]
- Kim, C. Segmenting a low-depth-of-field image using morphological filters and region merging. IEEE Trans. Image Process. 2005, 14, 1503–1511. [Google Scholar]
- Liu, Z.; Li, W.; Shen, L.; Han, Z.; Zhang, Z. Automatic segmentation of focused objects from images with low depth of field. Pattern Recognit. Lett. 2010, 31, 572–581. [Google Scholar] [CrossRef]
- Ahn, S.; Chong, J. Segmenting a noisy low-depth-of-field image using adaptive second-order statistics. IEEE Signal Process. Lett. 2015, 22, 275–278. [Google Scholar] [CrossRef]
- Mei, J.; Si, Y.; Gao, H. A curve evolution approach for unsupervised segmentation of images with low depth of field. IEEE Trans. Image Process. 2013, 22, 4086–4095. [Google Scholar] [CrossRef]
- Shaik, F.; Reddy, B.V.; Pavankumar, G.V.; Viswanath, C. Unsupervised segmentation of image using novel curve evolution method. In ICCCE 2020; Springer: Singapore, 2021; pp. 587–597. [Google Scholar] [CrossRef]
- Roy, M.; Mukhopadhyay, S. A scheme for edge-based multi-focuscolor image fusion. Multimed. Tools Appl. 2020, 79, 24089–24117. [Google Scholar] [CrossRef]
- Wen, Y.; Yang, X.; Celik, T.; Sushkova, O.; Albertini, M.K. Multi focus image fusion using convolutional neural network. Multimed. Tools Appl. 2020, 79, 34531–34543. [Google Scholar] [CrossRef]
- Wang, Z.; Ma, Y.; Cheng, F.; Yang, L. Review of pulse-coupled neural networks. Image Vis. Comput. 2010, 28, 5–13. [Google Scholar] [CrossRef]
- Eckhorn, R.; Reitboeck, H.J.; Arndt, M.; Dicke, P. Feature linking via synchronization among distributed assemblies: Simulations of results from cat visual cortex. Neural Comput. 1990, 2, 293–307. [Google Scholar] [CrossRef]
- Jiao, K.; Pan, Z. A Novel Method for Image Segmentation Based on Simplified Pulse Coupled Neural Network and Gbest Led Gravitational Search Algorithm. IEEE Access 2019, 7, 21310–21330. [Google Scholar] [CrossRef]
- Lian, J.; Yang, Z.; Liu, J.; Sun, W.; Zheng, L.; Du, X.; Yi, Z.; Shi, B.; Ma, Y. An overview of image segmentation based on pulse coupled neural network. Arch. Comput. Methods Eng. 2021, 28, 387–403. [Google Scholar] [CrossRef]
- Xiang-Yu, D.; Yi-De, M.A. PCNN model automatic parameters determination and its modified model. Acta Electron. Sin. 2012, 40, 955–964. [Google Scholar]
- Zhou, D.G.; Gao, C.; Guo, Y.C. Adaptive simplified PCNN parameter setting for image segmentation. Acta Autom. Sin. 2014, 40, 1191–1197. [Google Scholar]
- Wei, S.; Hong, Q.; Hou, M. Automatic image segmentation based on PCNN with adaptive threshold time constant. Neuro Comput. 2011, 74, 1485–1491. [Google Scholar] [CrossRef]
- Kuntimad, G.; Ranganath, H.S. Perfect image segmentation using pulse coupled neural networks. IEEE Trans. Neural Netw. 1999, 10, 591–598. [Google Scholar] [CrossRef]
- Chen, Y.; Park, S.-K.; Ma, Y.; Ala, R. A new automatic parameter setting method of a simplified PCNN for image segmentation. IEEE Trans. Neural Netw. 2011, 22, 880–892. [Google Scholar] [CrossRef]
- Ma, Y.-D.; Liu, Q.; Quan, Z.-B. Automated image segmentation using improved PCNN model based on cross-entropy. In Proceedings of the 2004 International Symposium on Intelligent Multimedia, Video and Speech Processing, Hong Kong, China, 20–22 October 2004; pp. 743–746. [Google Scholar]
- Min, J.; Chai, Y. A PCNN improved with Fisher criterion for infrared human image segmentation. In Proceedings of the 2015 IEEE Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 19–20 December 2015; pp. 1101–1105. [Google Scholar] [CrossRef]
- Helmy, A.K.; El-Taweel, G.S. Image segmentation scheme based on SOM–PCNN in frequency domain. Appl. Soft Comput. 2016, 40, 405–415. [Google Scholar] [CrossRef]
- Xu, X.; Liang, T.; Wang, G.; Wang, M.; Wang, X. Self-adaptivePCNN based on the ACO algorithm and its application on medical imagesegmentation. Intell. Autom. Soft Comput. 2017, 23, 303–310. [Google Scholar] [CrossRef]
- Hernandez, J.; Gómez, W. Automatic tuning of the pulse-coupled neural network using differential evolution for image segmentation. In Mexican Conference on Pattern Recognition; Springer: Cham, Switzerland, 2016; pp. 157–166. [Google Scholar] [CrossRef]
- Ojala, T.; Pietikainen, M.; Maenpaa, T. Multiresolution gray-scale and rotation invariant texture classification with local binary patterns. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 971–987. [Google Scholar] [CrossRef]
- Liu, L.; Zhao, L.; Long, Y.; Kuang, G.; Fieguth, P. Extended local binary patterns for texture classification. Image Vis. Comput. 2012, 30, 86–99. [Google Scholar] [CrossRef]
- Qi, X.; Xiao, R.; Li, C.-G.; Qiao, Y.; Guo, J.; Tang, X. Pairwise rotation invariant Co-occurrence local binary pattern. IEEE Trans. Pattern Anal.Mach. Intell. 2014, 36, 2199–2213. [Google Scholar] [CrossRef] [PubMed]
- Ojala, T.; Pietikäinen, M.; Mxaxenpxaxxax, T. Gray scale and rotation invariant texture classification with local binary patterns. In European Conference on Computer Vision; Springer: Berlin, Germany, 2000; pp. 404–420. [Google Scholar] [CrossRef] [Green Version]
- Pietikäinen, M.; Ojala, T.; Xu, Z. Rotation-invariant texture classification using feature distributions. Pattern Recognit. 2000, 33, 43–52. [Google Scholar] [CrossRef] [Green Version]
- Tan, X.; Triggs, B. Enhanced local texture feature sets for face recognition under difficult lighting conditions. IEEE Trans. Image Process. 2010, 19, 1635–1650. [Google Scholar]
- Khan, A.; Irtaza, S.A.; Javed, A.; Khan, M.A. Segmentation of Defocus Blur using Local Triplicate Co-Occurrence Patterns (LTCoP). In Proceedings of the 2019 13th International Conference on Mathematics, Actuarial Science, Computer Science and Statistics (MACS), Karachi, Pakistan, 14–15 December 2019. [Google Scholar] [CrossRef]
- Mahmood, M.T.; Ali, U.; Choi, Y.K. Single image defocus blur segmentation using Local Ternary Pattern. ICT Express 2020, 6, 113–116. [Google Scholar] [CrossRef]
- Agarwal, M.; Singhal, A.; Lall, B. Multi-channel local ternary pattern for content-based image retrieval. Pattern Anal. Appl. 2019, 22, 1585–1596. [Google Scholar] [CrossRef]
- Anwar, S.; Hayder, Z.; Porikli, F. Deblur and deep depth from single defocus image. Mach. Vis. Appl. 2021, 32, 1–13. [Google Scholar] [CrossRef]
- Zhao, F.; Lu, H.; Zhao, W.; Yao, L. Image-Scale-Symmetric Cooperative Network for Defocus Blur Detection. IEEE Trans. Circuits Syst. Video Technol. 2021. [CrossRef]
- Zeng, K.; Wang, Y.; Mao, J.; Zhou, X. Deep residual deconvolutional networks for defocus blur detection. IET Image Process. 2021, 15, 724–734. [Google Scholar] [CrossRef]
- Basar, S.; Ali, M.; Ochoa-Ruiz, G.; Zareei, M.; Waheed, A.; Adnan, A. Unsupervised color image segmentation: A case of RGB histogram based K-means clustering initialization. PLoS ONE 2020, 15, e0240015. [Google Scholar] [CrossRef] [PubMed]
- Ilieva, G.; Yankova, T.; Klisarova-Belcheva, S. Decision analysis with classic and fuzzy EDAS modifications. Comput. Appl. Math. 2018, 37, 5650–5680. [Google Scholar] [CrossRef]
- Liang, W.-Z.; Zhao, G.-Y.; Luo, S.-Z. An integrated EDAS-ELECTRE method with picture fuzzy information for cleaner production evaluation in gold mines. IEEE Access 2018, 6, 65747–65759. [Google Scholar] [CrossRef]
- Li, Y.-Y.; Wang, J.-Q.; Wang, T.-L. A linguistic neutrosophic multi criteria group decision-making approach with EDAS method. Arabian J. Sci. Eng. 2019, 44, 2737–2749. [Google Scholar] [CrossRef]
- Stevic, Z.; Vasiljevic, M.; Putka, A.; Tanackov, I.; Junevilius, R.; Veskovic, S. Evaluation of suppliers under uncertainty: A multiphase approach based on fuzzy AHP and fuzzy EDAS. Transport 2019, 34, 52–66. [Google Scholar] [CrossRef] [Green Version]
- Mehmood, G.; Khan, M.Z.; Waheed, A.; Zareei, M.; Mohamed, E.M. A trust-based energy-efficient and reliable communication scheme(Trust-based ERCS) for remote patient monitoring in wireless body area networks. IEEE Access 2020, 8, 131397–131413. [Google Scholar] [CrossRef]
- Rassem, T.H.; Khoo, B.E. Completed local ternary pattern for rotation invariant texture classification. Sci. World J. 2014, 2014, 373254. [Google Scholar] [CrossRef] [Green Version]
- Jones, H.D. Challenging regulations: Managing risks in crop biotechnology. Food Energy Secur. 2015, 4, 87. [Google Scholar] [CrossRef] [Green Version]





| Authors | Study Title | Algorithm Description |
|---|---|---|
| Basar20 et al. [69] | “Unsupervised color image segmentation: A case of RGB histogram-based K-means clustering initialization” | Proposed an initialization approach based on K-means to solve the image segmentation problem by applying the EDAS techniques for ranking purposes. |
| Ilieva et al. [70] | “Decision analysis with classic and fuzzy EDAS Modifications” | Suggested the L1 measure in EDAS method for solving some issues in MCDM problems to overcome the computational complexity. |
| Liang et al. [71] | “An Integrated EDAS-ELECTRE Method with Picture Fuzzy Information for Cleaner Production Evaluation in Gold Mines” | proposed a technique of 4-level degrees of membership with PFN (Picture Fuzzy numbers) to rank the construction of cleanser for gold mines. |
| Li et al. [72] | “Linguistic-Neutrosophic Multi-criteria Group Decision-Making Approach with EDAS technique” | The presented approach adopted the MCGDM (Multi-Criteria Group-Decision Making) scheme, which is based on EDAS for setting and controlling the neutrosophic issues. |
| Stevic et al. [73] | “Evaluation of Suppliers Under Uncertainty: A Multiphase Approach Based on Fuzzy AHP and Fuzzy EDAS” | The Fuzzy Analytical Hierarchy approach is implemented to indicate and estimate the suppliers and intended to explore the Fuzzy-EDAS model. |
| Mehmood et al. [74] | “A Trust-Based Energy Efficient and Reliable Communication Scheme (Trust-Based ERCS) for Remote Patient Monitoring in Wireless Body Area Networks” | The suggested study is about a stable technique for communication purposes to preserve the privacy of WBAN (Wireless Body Area Network). The evaluation of the method is performed by the EDAS approach and identified by the top-most rank. |
| Basar21 et al. [21] | “A Novel Defocused Image Segmentation Method based on PCNN and LBP” | The proposed hybrid presented a novel sharpness descriptor for segmenting the in-focused region from unfocused one in the defocused blur image and ranked on the top by adopting the EDAS ranking scheme. |
| Symbol | Description |
|---|---|
| Test image | |
| PCNN | Pulse Coupled Neural Network |
| LTP | Local Ternary Pattern |
| Gray-scale image | |
| Resultant image | |
| LDoF | Low Depth of Filed |
| MCC | Matthew’s Correlation-Coefficient |
| DSC | Dice-Similarity-Coefficient |
| JCM | Jaccard-Coefficient Measure |
| Gray-scale image region | |
| Max | Maximum frequency region |
| Min | Minimum frequency region |
| Mean | Average frequency region |
| The pixel coordinate (x,y) in the defocused image | |
| Thresholded LTP value | |
| Binary segmentation of LTP algorithm | |
| Resultant edge map of PCNN | |
| f | The sequence of firing matrix that records each firing order of pixel |
| Pixel-connectivity matrix | |
| Binary segmented output | |
| Color segmented output | |
| Connecting-weight matrix | |
| Connecting coefficient of strength | |
| Dynamic-threshold coefficient | |
| Dynamic-strength coefficient | |
| Decay-factor | |
| Gray-scale mean values of low scale frequency | |
| Gray-scale mean values of mid scale frequency | |
| Gray-scale mean values of high scale frequency | |
| Td | Threshold value along with minimum limit |
| Criteria for judgment | |
| Dynamic-threshold matrix | |
| EDAS | Evaluation Based on Distance from Average Solution |
| Out-of-Focus Segmentation | Approx. Runtime |
|---|---|
| LBP [20] | 27.19 s |
| LTP [22] | 26.50 s |
| Shi15 [14] | 38.36 s |
| Zeng [23] | 19.18 s |
| Shi14 [16] | 705.2 s |
| Su [17] | 37.00 s |
| Zhuo [18] | 20.59 s |
| Zhu [19] | 12.00 min |
| Basar21 [21] | 29.05 s |
| Ours | 28.99 s |
| Approaches | Performance-Estimations | ||
|---|---|---|---|
| Precision | Recall | F1-Score | |
| Zhu [19] | 0.9632 | 0.8651 | 0.8681 |
| Shi15 [14] | 0.7664 | 0.9985 | 0.8653 |
| Shi14 [16] | 0.8001 | 0.9531 | 0.8112 |
| Su [17] | 0.7645 | 0.9644 | 0.7997 |
| Zhuo [18] | 0.6788 | 1 | 0.7667 |
| Zeng [23] | 0.9886 | 1 | 0.9895 |
| LBP [20] | 0.8631 | 0.9651 | 0.8697 |
| LTP [22] | 0.9981 | 0.9564 | 0.9811 |
| Basar21 [21] | 0.9785 | 1 | 0.9885 |
| Ours | 0.9894 | 1 | 0.9990 |
| Approaches | Performance-Estimations | ||
|---|---|---|---|
| Precision | Recall | F1-Score | |
| Zhu [19] | 0.9633 | 0.8651 | 0.8681 |
| Shi15 [14] | 0.7664 | 0.9985 | 0.8653 |
| Shi14 [16] | 0.8001 | 0.9531 | 0.8112 |
| Su [17] | 0.7645 | 0.9644 | 0.7997 |
| Zhuo [18] | 0.6788 | 1 | 0.7667 |
| Zeng [23] | 0.9886 | 1 | 0.9895 |
| LBP [20] | 0.8631 | 0.9651 | 0.8697 |
| LTP [22] | 0.9981 | 0.9564 | 0.9811 |
| Basar21 [21] | 0.9785 | 1 | 0.9885 |
| Ours | 0.9894 | 1 | 0.999 |
| 0.87907 | 0.97026 | 0.89388 | |
| Approaches | Performance-Estimations | ||
|---|---|---|---|
| Precision | Recall | F1-Score | |
| Zhu [19] | 0 | 0.1083 | 0.02884 |
| Shi15 [14] | 0.1281 | 0 | 0.0319 |
| Shi14 [16] | 0.0898 | 0.0176 | 0.0924 |
| Su [17] | 0.1303 | 0.0060 | 0.1053 |
| Zhuo [18] | 0.2278 | 0 | 0.1422 |
| Zeng [23] | 0 | 0 | 0 |
| LBP [20] | 0.0181 | 0.0053 | 0.0270 |
| LTP [22] | 0 | 0.0142 | 0.0270 |
| Basar21 [21] | 0 | 0 | 0 |
| Ours | 0 | 0 | 0 |
| Approaches | Performance-Estimations | ||
|---|---|---|---|
| Precision | Recall | F1-Score | |
| Zhu [19] | 0.0957 | 0 | 0 |
| Shi15 [14] | 0 | 0.0291 | 0 |
| Shi14 [16] | 0 | 0 | 0 |
| Su [17] | 0 | 0 | 0 |
| Zhuo [18] | 0 | 0.0306 | 0 |
| Zeng [23] | 0.1245 | 0.0306 | 0.1069 |
| LBP [20] | 0 | 0 | 0 |
| LTP [22] | 0.1354 | 0 | 0.0975 |
| Basar21 [21] | 0.1131 | 0.0306 | 0.1058 |
| Ours | 0.1255 | 0.0306 | 0.1175 |
| Criteria (W) | 0.6125 | 0.2737 | 0.1139 | |
|---|---|---|---|---|
| Approaches | Performance-Estimation | |||
| Precision | Recall | F1-Score | ||
| Zhu [19] | 0 | 0.0296 | 0.0033 | 0.0329 |
| Shi15 [14] | 0.0785 | 0 | 0.0036 | 0.1150 |
| Shi14 [16] | 0.0550 | 0.0049 | 0.0105 | 0.0703 |
| Su [17] | 0.0798 | 0.0016 | 0.0121 | 0.0934 |
| Zhuo [18] | 0.1395 | 0 | 0.0162 | 0.1557 |
| Zeng [23] | 0 | 0 | 0 | 0 |
| LBP [20] | 0.0111 | 0 | 0 | 0.0111 |
| LTP [22] | 0 | 0.0039 | 0 | 0.0039 |
| Basar21 [21] | 0 | 0 | 0 | 0 |
| Ours | 0 | 0 | 0 | 0 |
| Criteria (W) | 0.6125 | 0.2737 | 0.1139 | |
|---|---|---|---|---|
| Approaches | Performance-Estimation | |||
| Precision | Recall | F1-Score | ||
| Zhu [19] | 0.0586 | 0 | 0 | 0.0586 |
| Shi15 [14] | 0 | 0.0079 | 0 | 0.0079 |
| Shi14 [16] | 0 | 0 | 0 | 0 |
| Su [17] | 0 | 0 | 0 | 0 |
| Zhuo [18] | 0 | 0.0083 | 0 | 0.0083 |
| Zeng [23] | 0.0763 | 0.0083 | 0.0121 | 0.0968 |
| LBP [20] | 0 | 0 | 0 | 0 |
| LTP [22] | 0.0829 | 0 | 0.0112 | 0.0940 |
| Basar21 [21] | 0.0692 | 0.0083 | 0.0121 | 0.0897 |
| Ours | 0.0768 | 0.0084 | 0.0134 | 0.0986 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Basar, S.; Waheed, A.; Ali, M.; Zahid, S.; Zareei, M.; Biswal, R.R. An Efficient Defocus Blur Segmentation Scheme Based on Hybrid LTP and PCNN. Sensors 2022, 22, 2724. https://doi.org/10.3390/s22072724
Basar S, Waheed A, Ali M, Zahid S, Zareei M, Biswal RR. An Efficient Defocus Blur Segmentation Scheme Based on Hybrid LTP and PCNN. Sensors. 2022; 22(7):2724. https://doi.org/10.3390/s22072724
Chicago/Turabian StyleBasar, Sadia, Abdul Waheed, Mushtaq Ali, Saleem Zahid, Mahdi Zareei, and Rajesh Roshan Biswal. 2022. "An Efficient Defocus Blur Segmentation Scheme Based on Hybrid LTP and PCNN" Sensors 22, no. 7: 2724. https://doi.org/10.3390/s22072724
APA StyleBasar, S., Waheed, A., Ali, M., Zahid, S., Zareei, M., & Biswal, R. R. (2022). An Efficient Defocus Blur Segmentation Scheme Based on Hybrid LTP and PCNN. Sensors, 22(7), 2724. https://doi.org/10.3390/s22072724