
Effective Safety Message Dissemination with Vehicle Trajectory Predictions in V2X Networks


Abstract
:1. Introduction
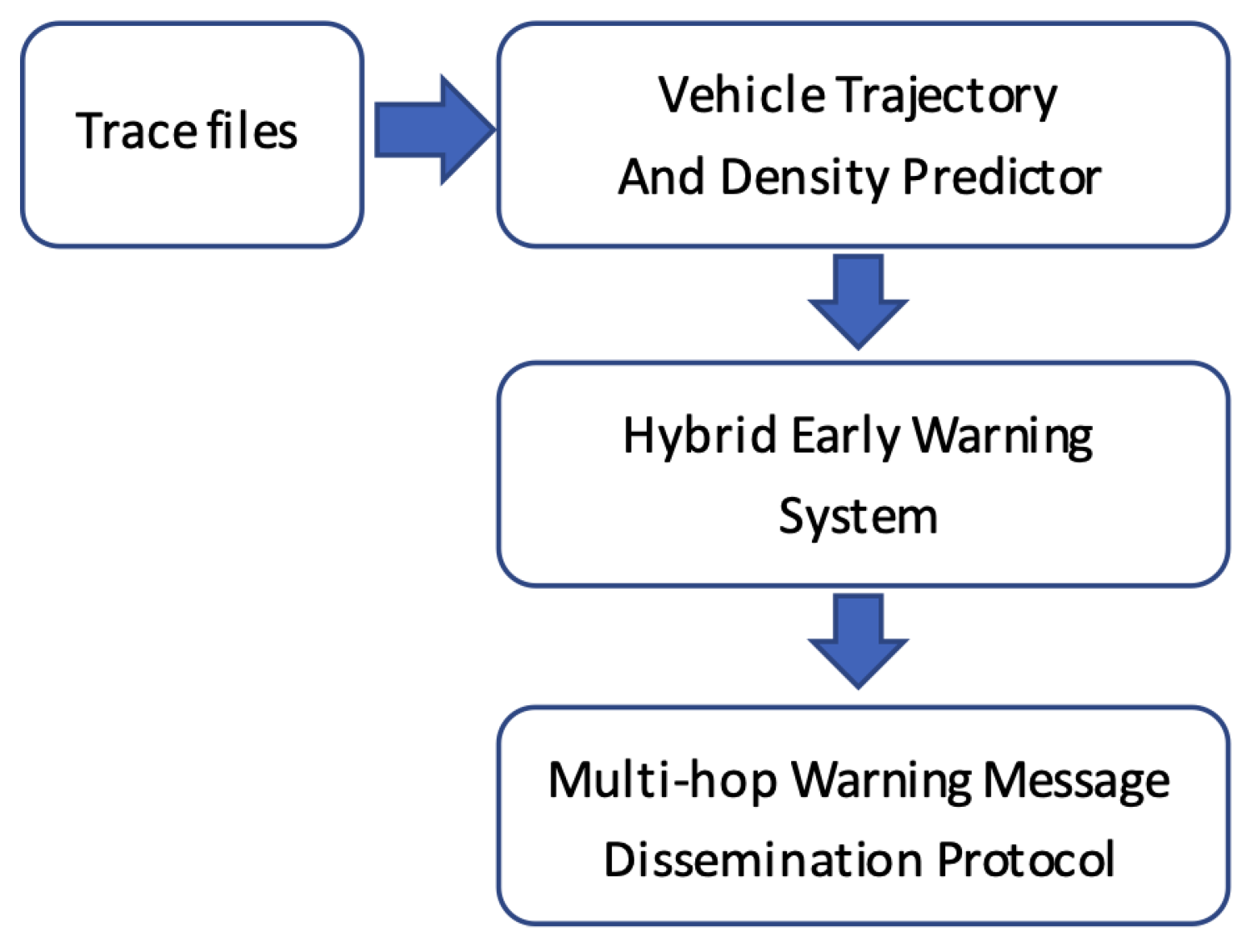
- We propose an end-edge-cloud architecture to deploy the machine learning-driven vehicle trajectory application on the network edge. The vehicle trajectory prediction scheme is based on a hybrid Markov chain approach with an inverted index model.
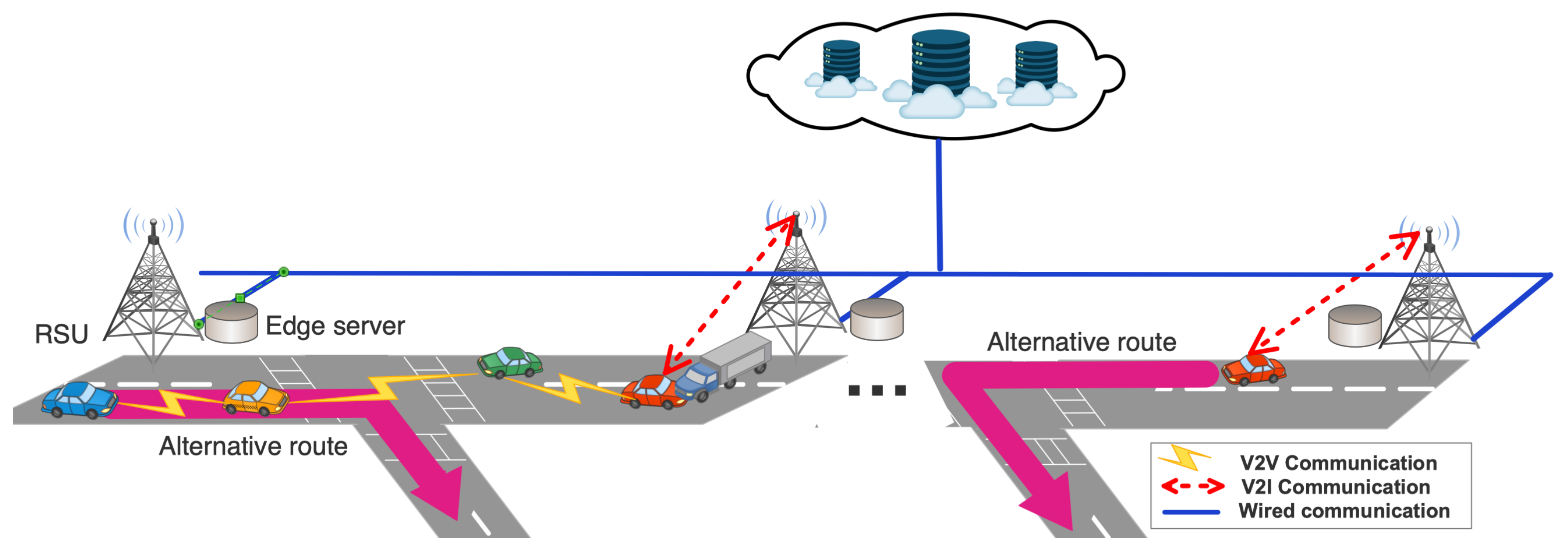
- We present a hybrid early warning system together with a multi-hop data dissemination protocol for VANETs based on vehicle trajectory prediction to deliver alert messages to relevant vehicles in both sparse and dense scenarios. Our system can adaptively select either the V2V or V2I connections to disseminate the warning message based on the vehicle connectivity information to guarantee the timely delivery of the warning message.
- We evaluate our trajectory predictor, hybrid early warning system, and multi-hop data dissemination protocol using a rich vehicle dataset collected from a real-world VANET testbed. Through comprehensive experiments, we obtain consistently satisfactory results.
2. Related Work
2.1. Trajectory and Density Prediction
2.2. Intelligent Traffic Management
3. Safety Message Dissemination with Vehicle Trajectory Prediction
3.1. System Overview
3.2. Vehicle Trajectory and Density Prediction
- (1)
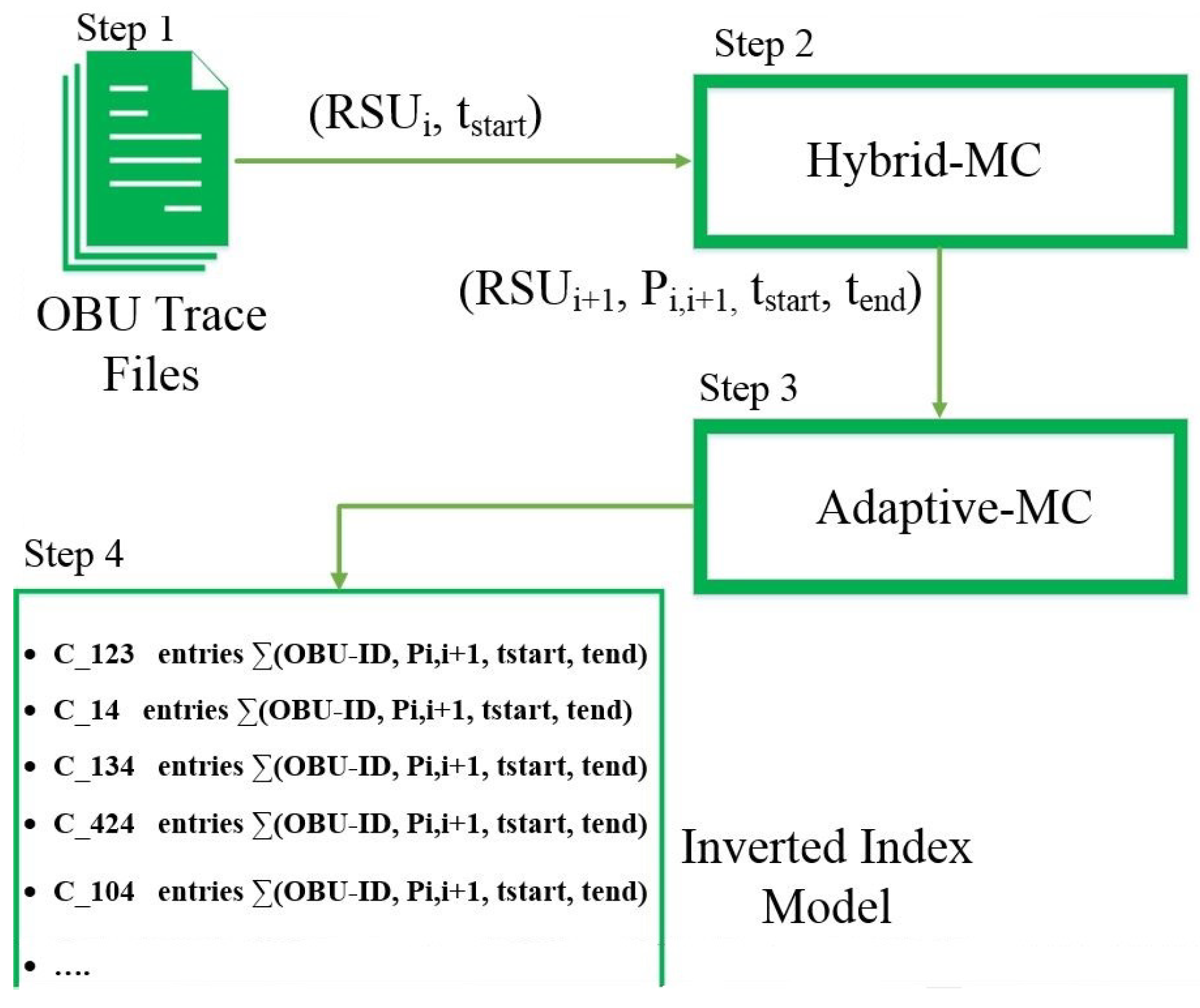
- Input for our model: mobility trace of each single vehicle with the connected RSU IDs and connection time.
- (2)
- Output of our model: after finishing the training step, the hybrid Markov chain generates a 4-item tuple ( , , , ), where is the predicted RSU that the OBU is going to connect, represents the transition probability to move from to , and are the timestamps to indicate when the vehicle was connected to current RSU ( ) and when the vehicle will arrive at the next RSU ( ), respectively. The connection time to a future RSU is estimated by the hybrid Markov chain.
- (3)
- Using the current , which can be easily obtained from the trace for each vehicle and the estimated from Step 2, the trajectory between these two RSUs can be predicted using the adaptive Markov chain. The output of the algorithm is an ordered list of grid cells, which the OBU will pass through when moving from to .
- (4)
- As soon as the predicted trajectory among two RSUs is identified, the inverted index should be updated. To do so, first, each row in the inverted index model is indexed by each grid cell ID of the predicted trajectory. Then, the tuple ( , , , ) is stored in the corresponding row of the inverted index model. Expired tuples for each vehicle are deleted from the rows. Finally, by summing up the number of tuples stored at each row, we can estimate the number of vehicles that may pass through the respective grid cell from to .The output of the proposed trajectory density predictor is stored in = {(, P-), (, P-),…, (, P-)}. The set includes two item tuples, where the ∈ {, , …, } demonstrate grid cells on the predicted trajectory that is passing from to , and P- store the OBU IDs that we estimated to meet each other on the specific grid cell of the predicted trajectory.
3.3. Effective Safety Message Dissemination
| Algorithm 1: Hybrid early warning system. |
 |
| Algorithm 2: Data dissemination algorithm based on the trajectory and density prediction. |
 |
4. Experiment Setup
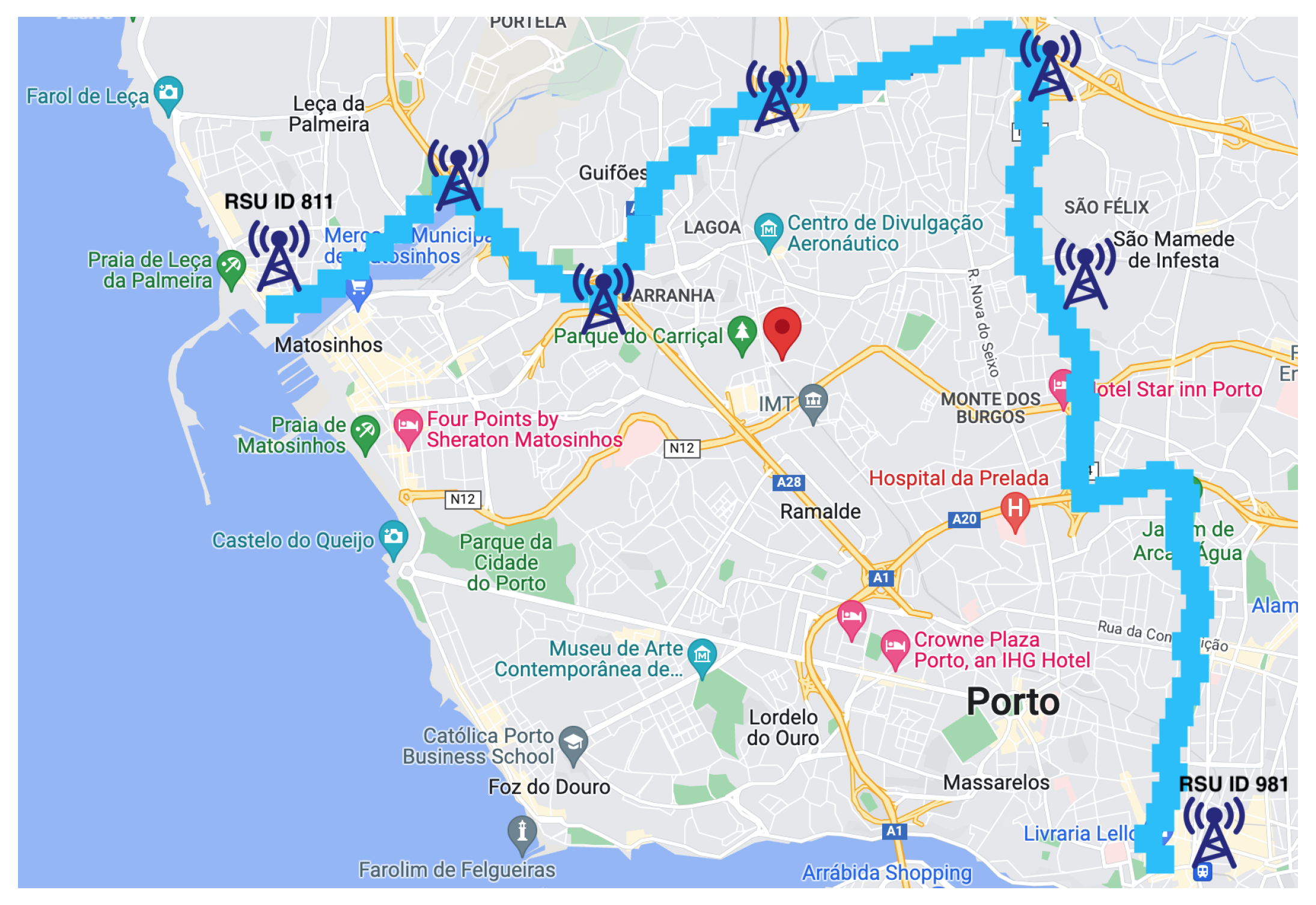
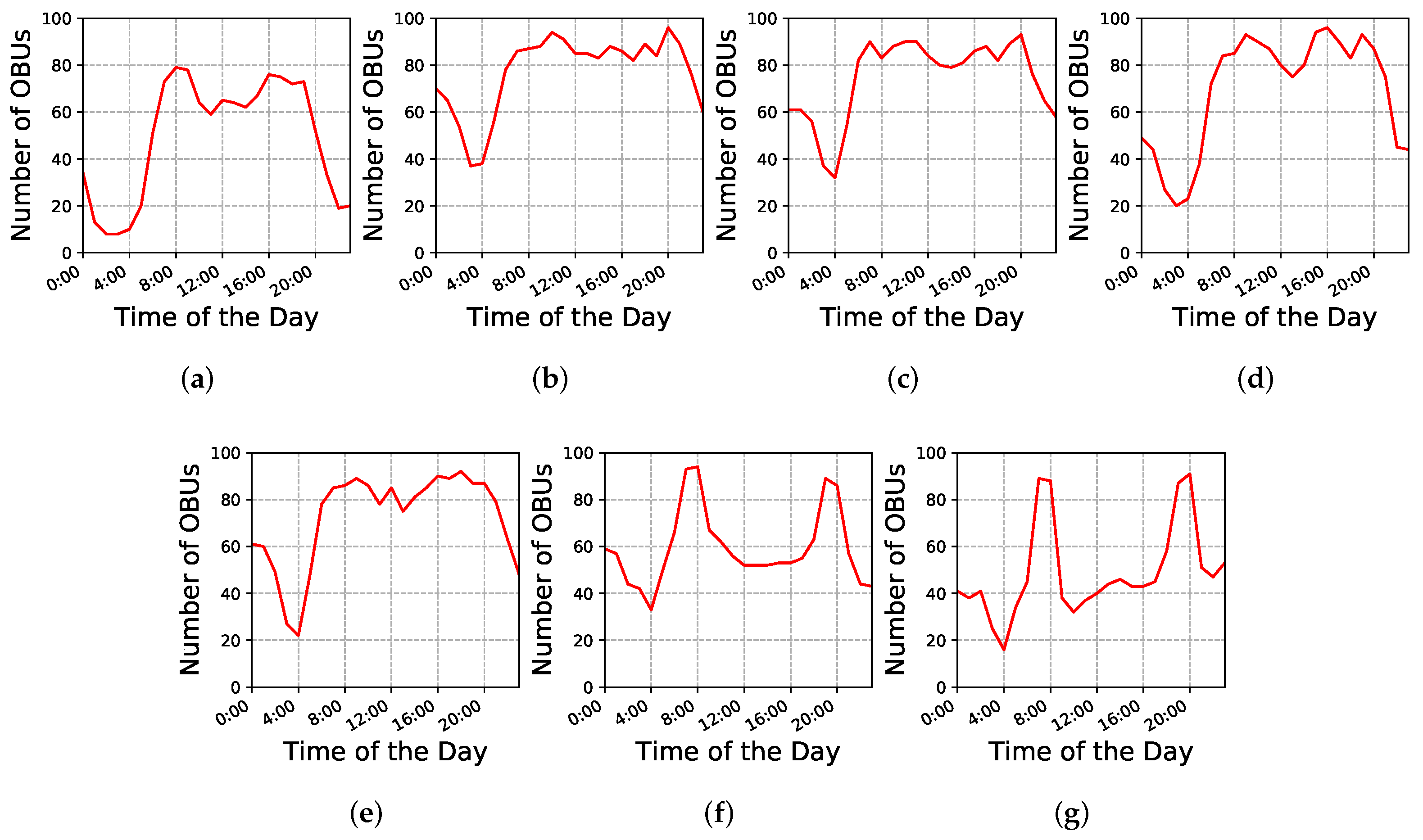
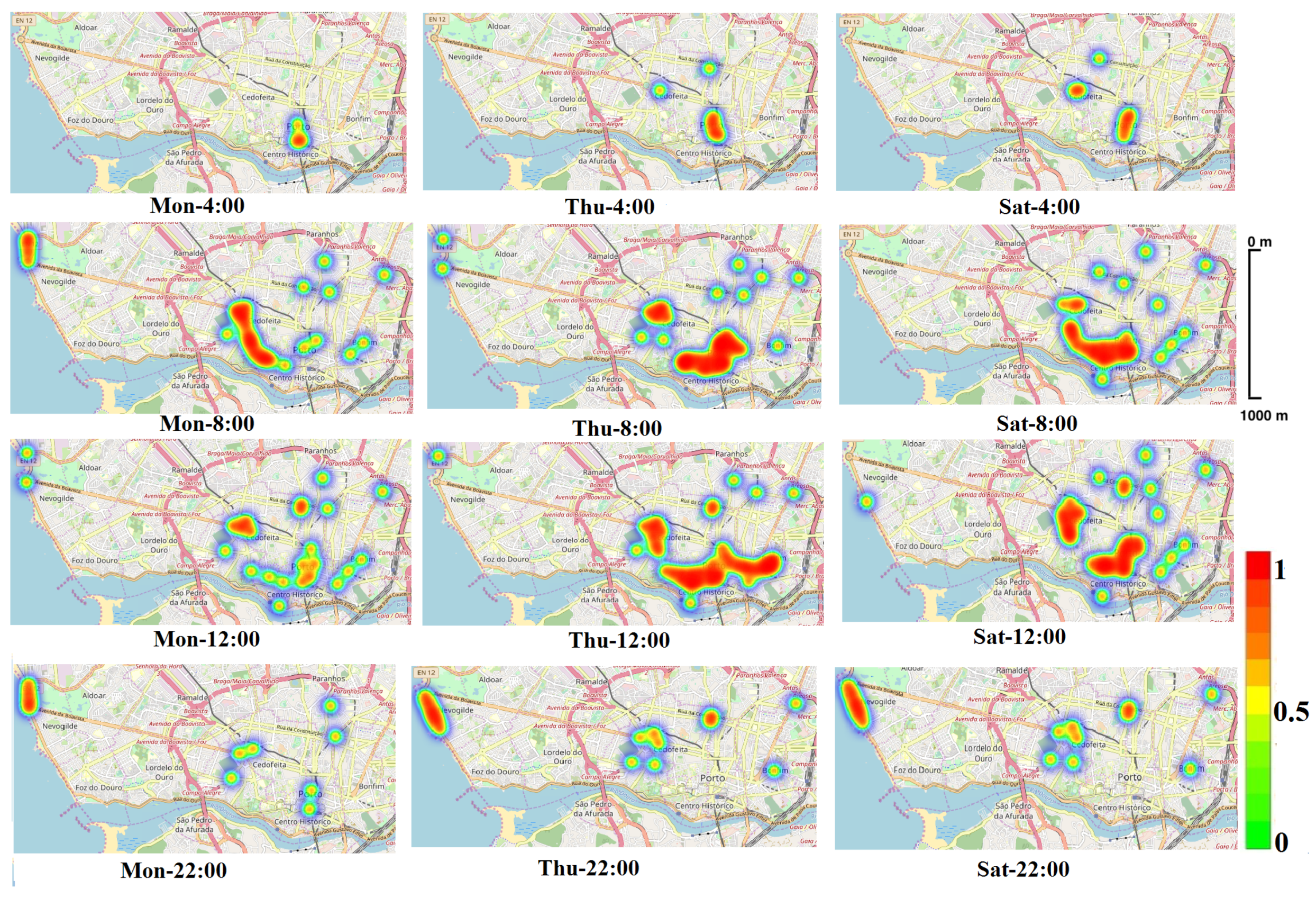
4.1. VANET Mobility Dataset
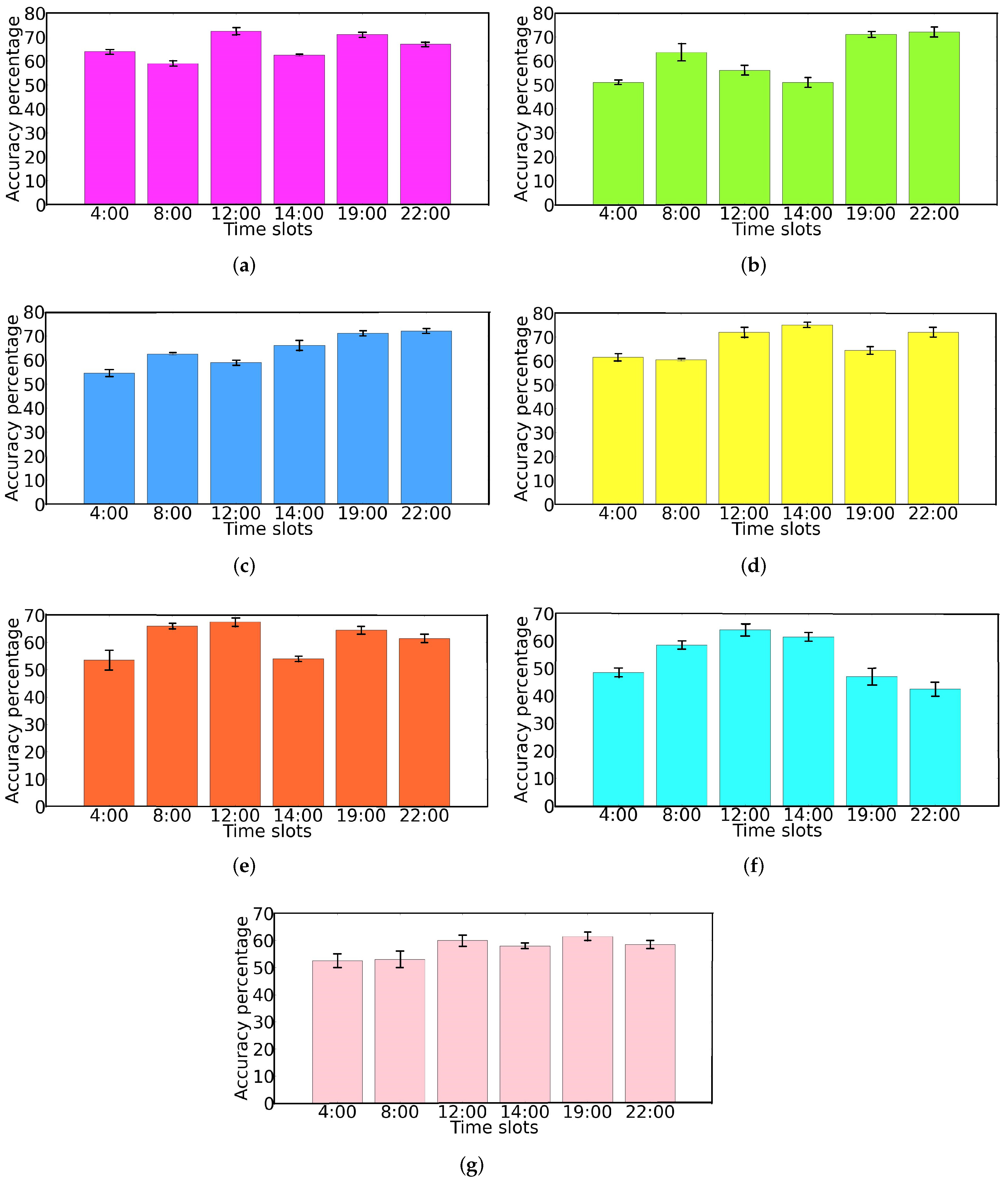
4.2. Evaluation of Vehicle Trajectory Density Prediction
4.3. Evaluation of Traffic Accident Message Dissemination
- Connected: the scenario in which it is possible to deliver the early warning messages using only V2V communications;
- Partitioned: the scenario in which it is not possible to deliver the early warning message promptly using the V2V communication;
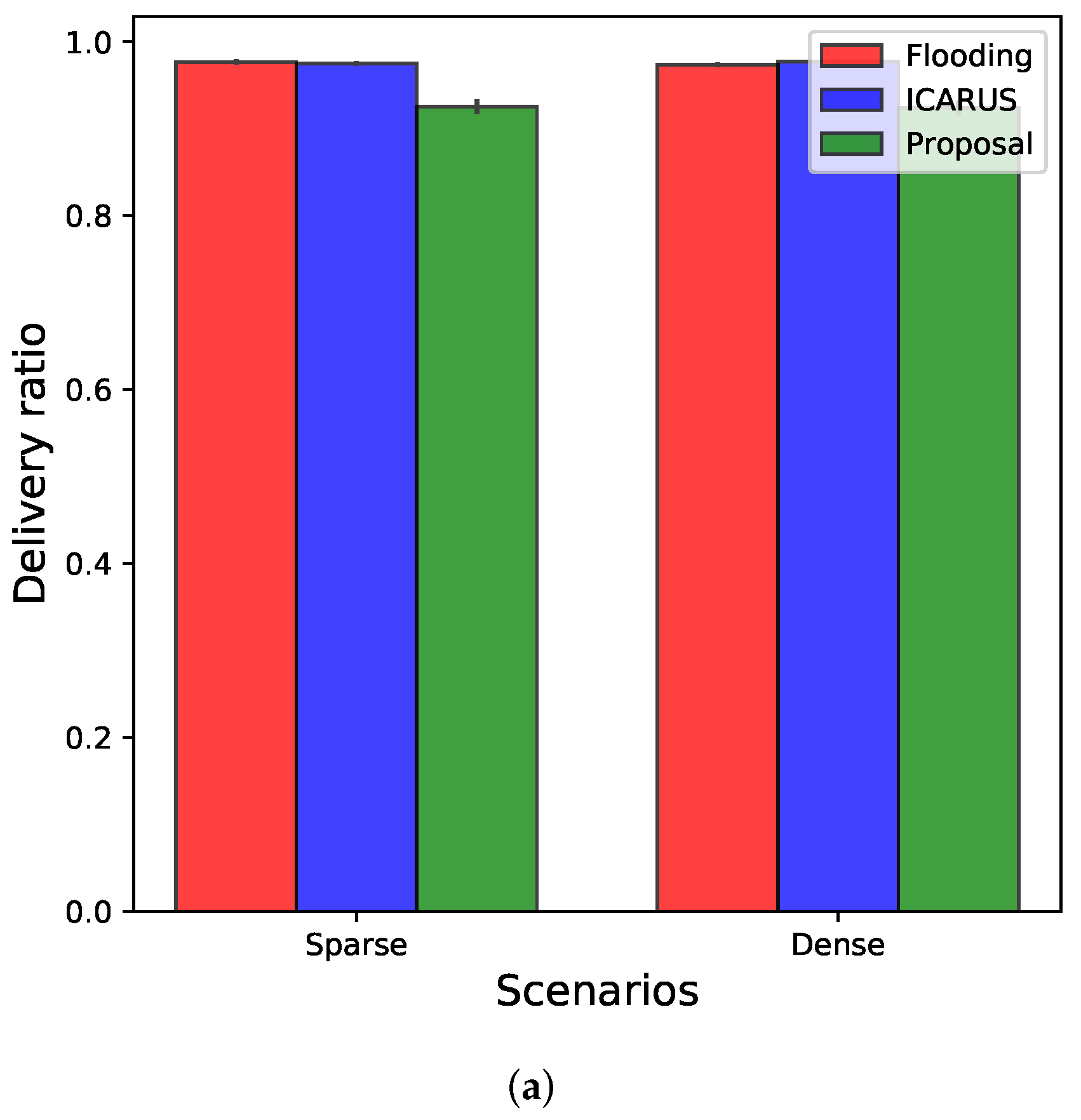
- Delivery ratio: the percentage of warning messages successfully delivered to the target vehicles. It is desired that an efficient system delivers about 100% of its generated messages for managing traffic efficiently;
- Transmitted messages: the total number of messages transmitted by the system to guarantee its service. A high number of transmitted messages is an indication of redundant and unnecessary transmissions;
- Latency: time to deliver the warning message to a target vehicle. High latency degrades the system efficiency when dealing with traffic management.
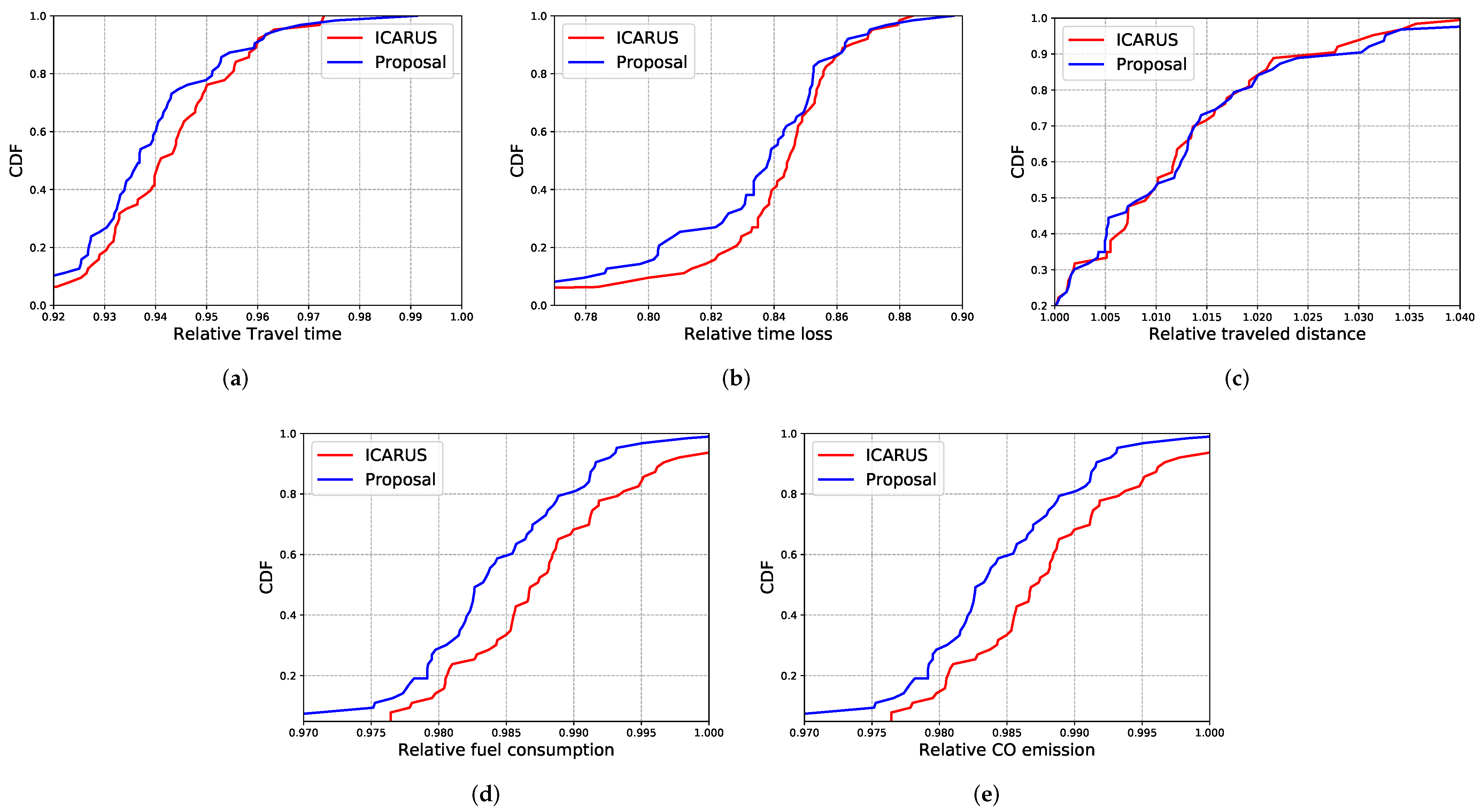
- Travel time: the total time that each OBU takes to travel a trajectory.
- Time loss: the total time spent in some traffic congestion and/or traffic bottleneck.
- Travelled distance: the total distance travelled by each OBU.
- Fuel consumption: the total fuel consumed by each OBU to travel its trajectory.
- CO2 emissions: the total CO2 emitted by each OBU to travel its trajectory.
5. Evaluation Results
5.1. Trajectory Density Prediction Results
5.2. Network Performance Results
5.3. Traffic Efficiency Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sanguesa, J.A.; Fogue, M.; Garrido, P.; Martinez, F.J.; Cano, J.; Calafate, C.T.; Manzoni, P. Real-time density estimation in urban environments by using vehicular communications. In Proceedings of the 2012 IFIP Wireless Days, Dublin, Ireland, 21–23 November 2012; pp. 1–6. [Google Scholar]
- Balcilar, M.; Sonmez, A.C. Extracting vehicle density from background estimation using Kalman filter. In Proceedings of the 2008 23rd International Symposium on Computer and Information Sciences, Istanbul, Turkey, 27–29 October 2008; pp. 1–5. [Google Scholar]
- Jeong, Y.; Byon, Y.; Castro-Neto, M.M.; Easa, S.M. Supervised Weighting-Online Learning Algorithm for Short-Term Traffic Flow Prediction. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1700–1707. [Google Scholar] [CrossRef]
- Wu, Z.; Zhang, Y.; Tan, G.; Hu, J. The research of traffic density extraction method under vehicular ad hoc network environment. J. Intell. Connect. Veh. 2019, 2, 25–32. [Google Scholar] [CrossRef] [Green Version]
- Guo, S.; Lin, Y.; Feng, N.; Song, C.; Wan, H. Attention based spatial-temporal graph convolutional networks for traffic flow forecasting. Proc. AAAI Conf. Artif. Intell. 2019, 33, 922–929. [Google Scholar] [CrossRef] [Green Version]
- Tokuda, K. Applications of Wireless Communication Technologies for Intelligent Transport Systems. Wirel. Pers. Commun. 2001, 17, 343–353. [Google Scholar] [CrossRef]
- Tyagi, V.; Kalyanaraman, S.; Krishnapuram, R. Vehicular Traffic Density State Estimation Based on Cumulative Road Acoustics. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1156–1166. [Google Scholar] [CrossRef]
- Shirani, R.; Hendessi, F.; Gulliver, T.A. A Store-Carry-Forward based Message Dissemination Approach with Local Density Estimation in Vehicular Ad-Hoc Networks. In Proceedings of the 2009 IEEE 70th Vehicular Technology Conference Fall, Anchorage, AK, USA, 20–23 September 2009. [Google Scholar]
- Bastani, S.; Landfeldt, B.; Libman, L. A traffic density model for radio overlapping in urban Vehicular Ad hoc Networks. In Proceedings of the 2011 IEEE 36th Conference on Local Computer Networks, Bonn, Germany, 4–7 October 2011; pp. 85–92. [Google Scholar]
- Bengio, Y. Learning Deep Architectures for AI. Found. Trends Mach. Learn. 2009, 2, 1–127. [Google Scholar] [CrossRef]
- Huang, W.; Song, G.; Hong, H.; Xie, K. Deep Architecture for Traffic Flow Prediction: Deep Belief Networks with Multitask Learning. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2191–2201. [Google Scholar] [CrossRef]
- Lv, Y.; Duan, Y.; Kang, W.; Li, Z.; Wang, F. Traffic Flow Prediction With Big Data: A Deep Learning Approach. IEEE Trans. Intell. Transp. Syst. 2015, 16, 865–873. [Google Scholar] [CrossRef]
- Li, L.; Lin, W.; Liu, H. Type-2 fuzzy logic approach for short-term traffic forecasting. IEEE Proc. Intell. Transp. Syst. 2006, 153, 33–40. [Google Scholar] [CrossRef]
- Sun, S.; Xu, X. Variational Inference for Infinite Mixtures of Gaussian Processes With Applications to Traffic Flow Prediction. IEEE Trans. Intell. Transp. Syst. 2011, 12, 466–475. [Google Scholar] [CrossRef]
- Ran, B. Using traffic prediction models for providing predictive traveler information. Int. J. Technol. Manag. 2000, 20, 326–339. [Google Scholar] [CrossRef]
- de Souza, A.M.; Villas, L.A. A Fully-distributed Traffic Management System to Improve the Overall Traffic Efficiency. In Proceedings of the ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems (MSWiM’16), Valletta, Malta, 13–17 November 2016; pp. 19–26. [Google Scholar]
- Wang, M.; Shan, H.; Lu, R.; Zhang, R.; Shen, X.; Bai, F. Real-Time Path Planning Based on Hybrid-VANET-Enhanced Transportation System. IEEE Trans. Veh. Technol. 2015, 64, 1664–1678. [Google Scholar] [CrossRef]
- Hawas, Y.E.; El-Sayed, H. Autonomous real time route guidance in inter-vehicular communication urban networks. Veh. Commun. 2015, 2, 36–46. [Google Scholar] [CrossRef]
- El-Sayed, H.; Thandavarayan, G. Congestion detection and propagation in urban areas using histogram models. IEEE Internet Things J. 2017, 5, 3672–3682. [Google Scholar] [CrossRef]
- de Souza, A.M.; Yokoyama, R.; Boukerche, A.; Maia, G.; Cerqueira, E.; Loureiro, A.A.; Villas, L.A. ICARUS: Improvement of traffic Condition through an Alerting and Re-routing System. Comput. Netw. 2016, 110, 118–132. [Google Scholar] [CrossRef]
- Wang, S.; Djahel, S.; Zhang, Z.; McManis, J. Next Road Rerouting: A Multiagent System for Mitigating Unexpected Urban Traffic Congestion. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2888–2899. [Google Scholar] [CrossRef] [Green Version]
- Guidoni, D.L.; Maia, G.; Souza, F.S.; Villas, L.A.; Loureiro, A.A. Vehicular traffic management based on traffic engineering for vehicular ad hoc networks. IEEE Access 2020, 8, 45167–45183. [Google Scholar] [CrossRef]
- de Souza, A.M.; Yokoyama, R.S.; Maia, G.; Loureiro, A.; Villas, L. Real-time path planning to prevent traffic jam through an intelligent transportation system. In Proceedings of the IEEE Symposium on Computers and Communication (ISCC’16), Messina, Italy, 27–30 June 2016; pp. 726–731. [Google Scholar]
- Pan, J.; Popa, I.S.; Borcea, C. DIVERT: A Distributed Vehicular Traffic Re-Routing System for Congestion Avoidance. IEEE Trans. Mob. Comput. 2017, 16, 58–72. [Google Scholar] [CrossRef]
- Doolan, R.; Muntean, G.M. EcoTrec: A Novel VANET-Based Approach to Reducing Vehicle Emissions. IEEE Trans. Intell. Transp. Syst. 2017, 18, 608–620. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, A.; Din, S.; Paul, A.; Jeon, G.; Aloqaily, M.; Ahmad, M. Real-time route planning and data dissemination for urban scenarios using the Internet of Things. IEEE Wirel. Commun. 2019, 26, 50–55. [Google Scholar] [CrossRef]
- Available online: http://www.inrix.com (accessed on 1 January 2022).
- Garip, M.T.; Gursoy, M.E.; Reiher, P.; Gerla, M. Scalable reactive vehicle-to-vehicle congestion avoidance mechanism. In Proceedings of the IEEE Consumer Communications and Networking Conference (CCNC’15), Las Vegas, NV, USA, 9–12 January 2015; pp. 943–948. [Google Scholar]
- Djahel, S.; Doolan, R.; Muntean, G.M.; Murphy, J. A Communications-Oriented Perspective on Traffic Management Systems for Smart Cities: Challenges and Innovative Approaches. IEEE Commun. Surv. Tutor. 2015, 17, 125–151. [Google Scholar] [CrossRef]
- de Souza, A.M.; Brennand, C.A.R.L.; Yokoyama, R.S.; Donato, E.A.; Madeira, E.R.M.; Villas, L.A. Traffic management systems: A classification, review, challenges, and future perspectives. Int. J. Distrib. Sens. Netw. 2017, 13, 1550147716683612. [Google Scholar] [CrossRef]
- Ameixieira, C.; Cardote, A.; Neves, F.; Meireles, R.; Sargento, S.; Coelho, L.; Afonso, J.; Areias, B.; Mota, E.; Costa, R.; et al. Harbornet: A real-world testbed for vehicular networks. IEEE Commun. Mag. 2014, 52, 108–114. [Google Scholar] [CrossRef] [Green Version]
- FutureCities Project. Living Lab: Vehicular Adhoc Networking. Available online: http://futurecities.up.pt/site/vehicular-ad-hoc-networking-testbed/ (accessed on 1 January 2022).
- Karimzadeh, M.; Gerber, F.; Zhao, Z.; Braun, T.I. Pedestrians Trajectory Prediction in Urban Environments. In Proceedings of the 2019 International Conference on Networked Systems (NetSys) (NetSys’19), Munich, Germany, 18–21 March 2019. [Google Scholar]
- Monteiro, R.; Guedes, L.; Condeixa, T.; Neves, F.; Sargento, S.; Guardalben, L.; Steenkiste, P. Lessons learned from a real vehicular network deployment of delay-tolerant networking. In Proceedings of the 2015 IEEE International Conference on Communication Workshop (ICCW), London, UK, 8–12 June 2015; pp. 2489–2494. [Google Scholar]
- Zhao, Z.; Guardalben, L.; Karimzadeh, M.; Silva, J.; Braun, T.; Sargento, S. Mobility Prediction-Assisted Over-the-Top Edge Prefetching for Hierarchical VANETs. IEEE J. Sel. Areas Commun. 2018, 36, 1786–1801. [Google Scholar] [CrossRef]
- Karimzadeh, M.; Zhao, Z.; Gerber, F.; Braun, T. Pedestrians Complex Behavior Understanding and Prediction with Hybrid Markov Chain. In Proceedings of the 2018 14th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Limassol, Cyprus, 15–17 October 2018; pp. 200–207. [Google Scholar]
- Joksch, H.C. The shortest route problem with constraints. J. Math. Anal. Appl. 1966, 14, 191–197. [Google Scholar] [CrossRef]
- Moffat, A.; Zobel, J. Rank-biased Precision for Measurement of Retrieval Effectiveness. ACM Trans. Inf. Syst. 2008, 27, 2:1–2:27. [Google Scholar] [CrossRef]
- Behrisch, M.; Bieker, L.; Erdmann, J.; Krajzewicz, D. SUMO—Simulation of Urban MObility: An Overview. In Proceedings of the International Conference on Advances in System Simulation (SIMUL’11), Barcelona, Spain, 23–28 October 2011; pp. 63–68. [Google Scholar]
- Varga, A.; Hornig, R. An overview of the OMNeT++ simulation environment. In Proceedings of the International Conference on Simulation Tools and Techniques for Communications, Networks and Systems & Workshops (Simutools’08), Marseille, France, 3–7 March 2008; pp. 1–10. [Google Scholar]
- Sommer, C.; German, R.; Dressler, F. Bidirectionally Coupled Network and Road Traffic Simulation for Improved IVC Analysis. IEEE Trans. Mob. Comput. 2011, 10, 3–15. [Google Scholar] [CrossRef] [Green Version]
- de Souza, A.M.; Yokoyama, R.S.; Maia, G.; Loureiro, A.A.F.; Villas, L.A. Minimizing traffic jams in urban Centers using vehicular ad hoc networks. In Proceedings of the 2015 7th International Conference on New Technologies, Mobility and Security (NTMS), Paris, France, 27–29 July 2015; pp. 1–5. [Google Scholar] [CrossRef]
- The Handbook Emission Factors for Road Transport. Available online: http://www.hbefa.net (accessed on 1 January 2022).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| OSM bounding box | 41.1790, −8.6912; 41.1390, −8.5765 |
| Channel frequency | 5.89e0 Hz mW |
| Propagation model | Two ray |
| Transmission power | 2.2 mW |
| Communication range | 300 m |
| Bit rate | 18 Mbit/s |
| PHY model | IEEE 801.11p |
| MAC model | EDCA |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Liu, F.; Zhao, Z.; Karimzadeh, M. Effective Safety Message Dissemination with Vehicle Trajectory Predictions in V2X Networks. Sensors 2022, 22, 2686. https://doi.org/10.3390/s22072686
Li H, Liu F, Zhao Z, Karimzadeh M. Effective Safety Message Dissemination with Vehicle Trajectory Predictions in V2X Networks. Sensors. 2022; 22(7):2686. https://doi.org/10.3390/s22072686
Chicago/Turabian StyleLi, Hantao, Feng Liu, Zhongliang Zhao, and Mostafa Karimzadeh. 2022. "Effective Safety Message Dissemination with Vehicle Trajectory Predictions in V2X Networks" Sensors 22, no. 7: 2686. https://doi.org/10.3390/s22072686
APA StyleLi, H., Liu, F., Zhao, Z., & Karimzadeh, M. (2022). Effective Safety Message Dissemination with Vehicle Trajectory Predictions in V2X Networks. Sensors, 22(7), 2686. https://doi.org/10.3390/s22072686