
A Composite Flexible Sensor for Direct Ventricular Assist Device


Abstract
:1. Introduction
2. Materials and Methods
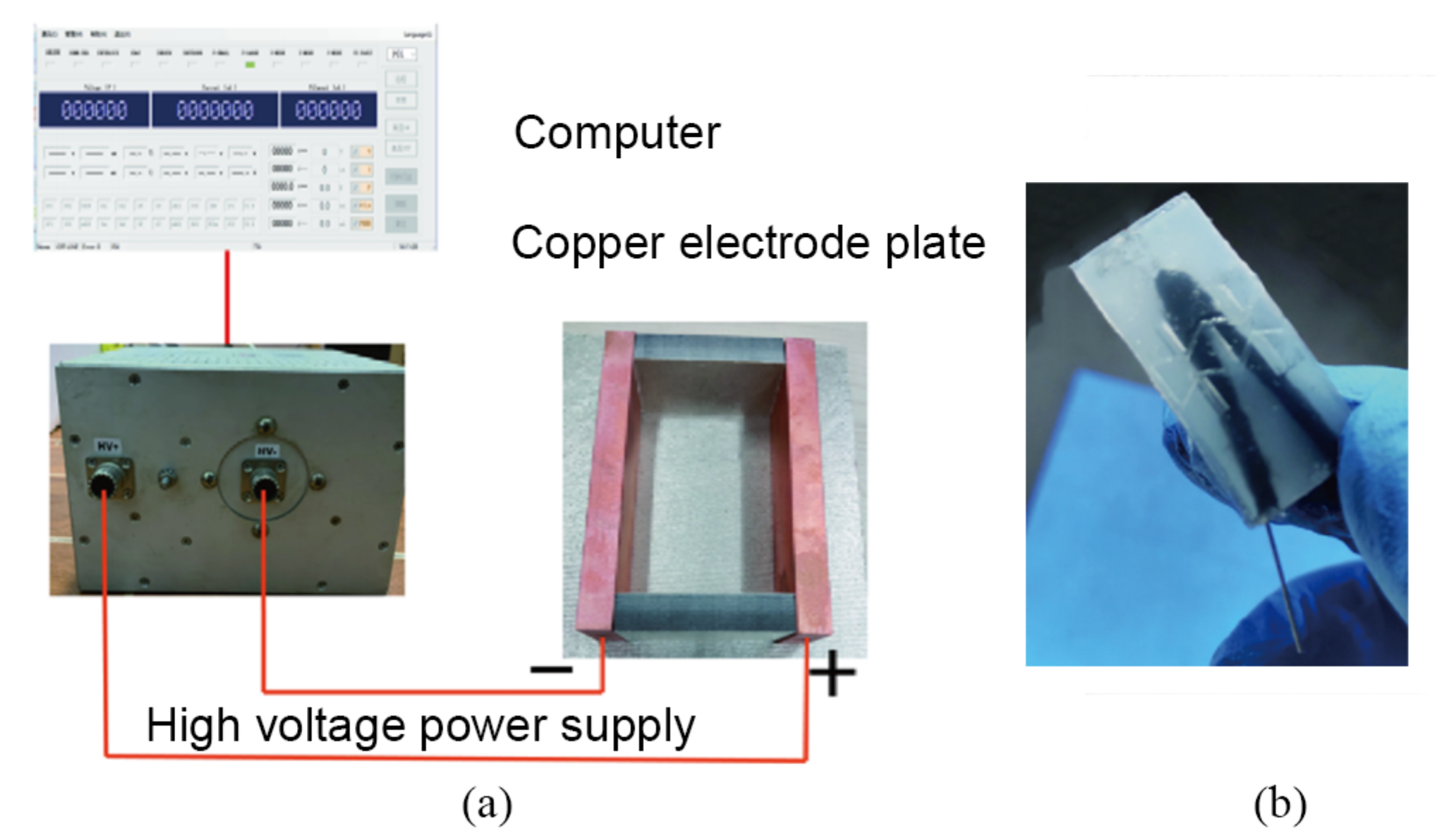
2.1. Exploration on the High-Voltage Electric Field Guidance of MWCNTs
2.2. Preparation of Conductive PDMS Strain Sensor
- Step 1: prepared the different predetermined weights of PDMS, multiwall carbon nanotubes and appropriate isopropane alcohol in the beaker.
- Step 2: sonication for 40 min, then heated at 90 °C and isopropanol volatized to obtain an MWCNT-PDMS mixture.
- Step 3: added the curing agent, then shaped in a v-mold and vacuum treated to remove bubbles.
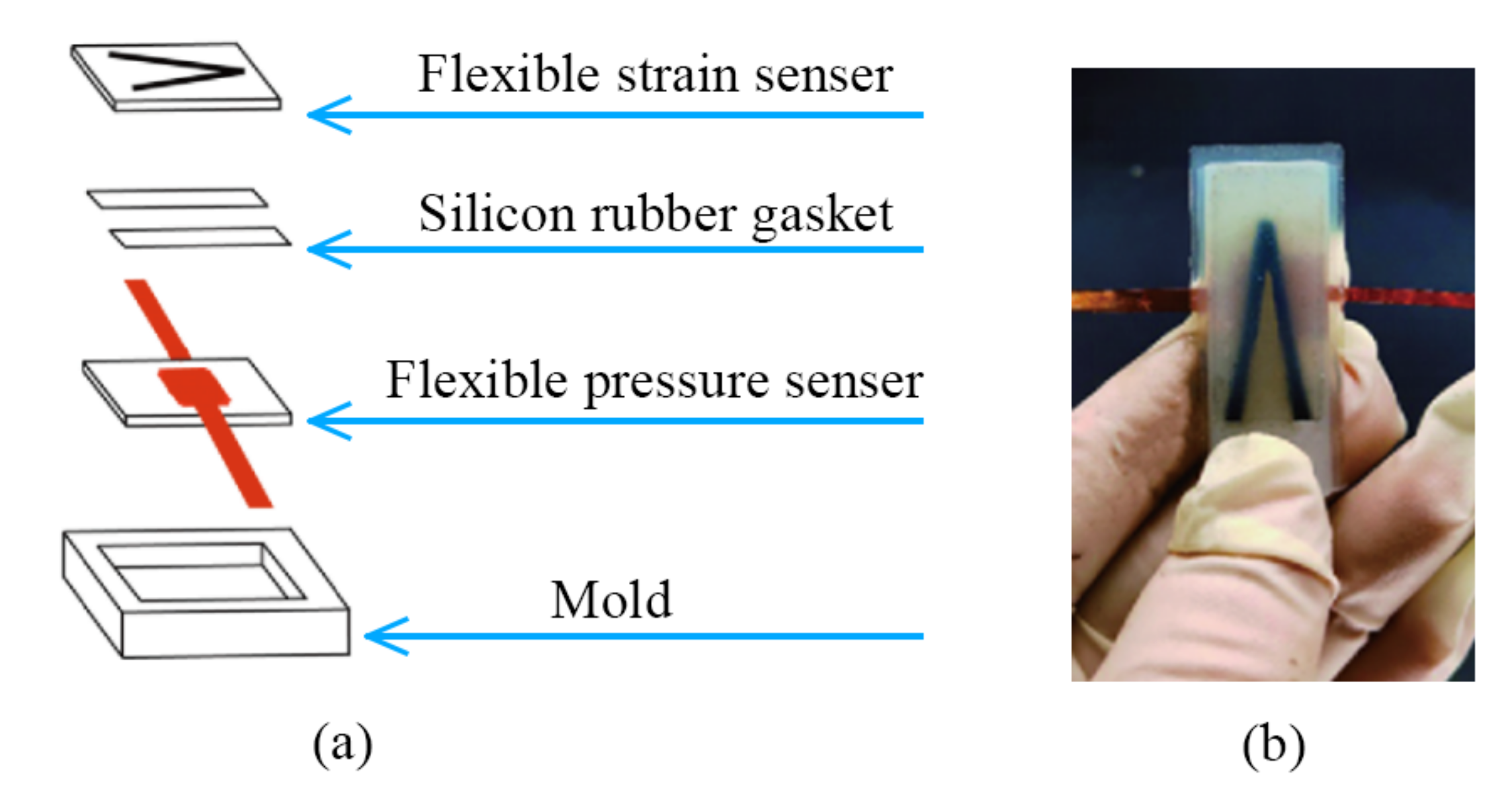
2.3. Preparation of Porous Conductive PDMS Pressure Sensor
- Step 1: The conductive PDMS material with 2% carbon nanotubes was prepared and cooled, and 5% ammonium bicarbonate was added.
- Step 2: After adding the curing agent, the form was heated and cured in the mold. The conductive PDMS porous dielectric layer without adding MWCNTs (Figure 5a) will turn black after adding the MWCNTs.
- Step 3: The cut into the conductive PDMS material was a 10 mm × 10 mm × 1 mm porous structural dielectric layer with a purple copper electrode plate affixed to its upper and lower surfaces.
- Step 4: The composite PDMS material was packaged and cured with silicone ecoflex, and the resulting porous PDMS material shown in Figure 5b was the flexible pressure sensor’s finished sample.
3. Results
3.1. Basic Properties and Micro Characterization of Conductive PDMS Materials
3.2. Performance Characterization of Flexible Resistance Strain Sensor
3.3. Performance Characterization of Capacitive Pressure Sensor
3.4. Composite and Performance of Flexible Sensors
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Godishala, A.; Nassif, M.E.; Raymer, D.S.; Hartupee, J.; Ewald, G.A.; Larue, S.J.; Vader, J.M. A Case Series of Acute Myocardial Infarction in Left Ventricular Assist Device-Supported Patients. ASAIO J. 2017, 63, 18–24. [Google Scholar] [CrossRef] [PubMed]
- Weimin, L. Direct Mechanical Ventricular Assistance. PJCCPVD 2002, 10, 111–114. [Google Scholar] [CrossRef]
- Yoshioka, D.; Takayama, H.; Garan, A.R.; Topkara, V.K.; Takeda, K. Bridge to durable left ventricular assist device for refractory cardiogenic shock. J. Thorac. Cardiovasc. Surg. 2017, 153, 752–762. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- den Uil, C.A.; Akin, S.; Jewbali, L.S.; Dos Reis Miranda, D.; Brugts, J.J.; Constantinescu, A.A.; Kappetein, A.P.; Caliskan, K. Short-term mechanical circulatory support as a bridge to durable left ventricular assist device implantation in refractory cardiogenic shock: A systematic review and meta-analysis. Eur. J. Cardiothorac. Surg. 2017, 52, 14–25. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aimin, T.; Baotang, Z.; Lei, Z.; Xianwu, L.; Hongyuan, X. Hydraulic design of a double suction blood pump. J. Tsing Hua Univ. 2011, 51, 662–666. [Google Scholar] [CrossRef]
- Anstadt, G.L.; Schiff, P.; Baue, A.E. Prolonged circulatory support by direct mechanical ventricular assistance. Trans.-Am. Soc. Artif. Intern. Organs 1966, 12, 72–79. [Google Scholar] [CrossRef] [PubMed]
- Roche, E.T.; Horvath, M.A.; Wamala, I.; Alazmani, A.; Whyte, W.; Song, S.E. Soft robotic sleeve supports heart function. Sci. Transl. Med. 2017, 9, eaaf3925. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Yambe, T.; Shiraishi, Y.; Duan, X.; Umezu, M. Non-blood contacting electro-hydraulic artificial myocardium (eham) improves the myocardial tissue perfusion. Technol. Health Care 2005, 13, 229–234. [Google Scholar] [CrossRef]
- Tan, J.P.; Liu, Y.-L.; Xu, Y.; Zhu, Z.-Y.; Liu, H.-T. Study on Phase Angle of Blood Pump Control System Driven by Large Gap Magnetic Field. Adv. Sci. Lett. 2011, 4, 4. [Google Scholar] [CrossRef]
- Kumari, P.; Mathew, L.; Syal, P. Increasing trend of wearables and multimodal interface for human activity monitoring: A review. Biosens. Bioelectron. 2017, 90, 298–307. [Google Scholar] [CrossRef]
- Samad, Y.A.; Li, Y.; Alhassan, S.M.; Liao, K. Novel graphene foam composite with adjustable sensitivity for sensor applications. ACS Appl. Mater. Interfaces 2015, 7, 9195–9202. [Google Scholar] [CrossRef]
- Tao, L.Q.; Wang, D.Y.; Tian, H.; Ju, Z.Y.; Liu, Y.; Pang, Y.; Chen, Y.Q.; Yang, Y.; Ren, T.L. Self-adapted and tunable graphene strain sensors for detecting both subtle and large human motions. Nanoscale 2017, 9, 8266–8273. [Google Scholar] [CrossRef]
- Muth, J.T.; Vogt, D.M.; Truby, R.L.; Menguc, Y.; Kolesky, D.B.; Wood, R.J.; Lewis, J.A. Embedded 3D printing of strain sensors within highly stretchable elastomers. Adv. Mater. 2014, 26, 6307–6312. [Google Scholar] [CrossRef]
- Persano, L.; Dagdeviren, C.; Su, Y.; Zhang, Y.; Girardo, S.; Pisignano, D.; Huang, Y.; Rogers, J.A. High performance piezoelectric devices based on aligned arrays of nanofibers of poly(vinylidenefluoride-co-trifluoroethylene). Nat. Commun. 2013, 4, 1633. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, Z.; Li, X.; Lin, Y.; Luo, N.; Long, M.; Zhao, N.; Xu, J.B. Flexible Piezoelectric-Induced Pressure Sensors for Static Measurements Based on Nanowires/Graphene Heterostructures. ACS Nano 2017, 11, 4507–4513. [Google Scholar] [CrossRef]
- Abshirini, M.; Charara, M.; Marashizadeh, P.; Saha, M.C.; Altan, M.C.; Liu, Y. Functional nanocomposites for 3D printing of stretchable and wearable sensors. Appl. Nanosci. 2019, 9, 2071–2083. [Google Scholar] [CrossRef]
- Zhu, B.; Niu, Z.; Wang, H.; Leow, W.R.; Wang, H.; Li, Y.; Zheng, L.; Wei, J.; Huo, F.; Chen, X. Microstructured graphene arrays for highly sensitive flexible tactile sensors. Small 2014, 10, 3625–3631. [Google Scholar] [CrossRef]
- Choi, D.Y.; Kim, M.H.; Oh, Y.S.; Jung, S.H.; Jung, J.H.; Sung, H.J.; Lee, H.W.; Lee, H.M. Highly Stretchable, Hysteresis-Free Ionic Liquid-Based Strain Sensor for Precise Human Motion Monitoring. ACS Appl. Mater. Interfaces 2017, 9, 1770–1780. [Google Scholar] [CrossRef]
- Guo, D.; Pan, X.; He, H. A simple and cost-effective method for improving the sensitivity of flexible strain sensors based on conductive polymer composites. Sens. Actuators A Phys. 2019, 298, 111608. [Google Scholar] [CrossRef]
- Monti, M.; Natali, M.; Torre, L.; Kenny, J.M. The alignment of single walled carbon nanotubes in an epoxy resin by applying a DC electric field. Carbon 2012, 50, 2453–2464. [Google Scholar] [CrossRef]
- Kim, K.H.; Hong, S.K.; Jang, N.S.; Ha, S.H.; Lee, H.W.; Kim, J.M. Wearable Resistive Pressure Sensor Based on Highly Flexible Carbon Composite Conductors with Irregular Surface Morphology. ACS Appl. Mater. Interfaces 2017, 9, 17499–17507. [Google Scholar] [CrossRef]
- Wang, X.; Gu, Y.; Xiong, Z.; Cui, Z.; Zhang, T. Electronic skin: Silk-molded flexible, ultrasensitive, and highly stable electronic skin for monitoring human physiological signals. Adv. Mater. 2014, 26, 1309. [Google Scholar] [CrossRef] [Green Version]
- Mannsfeld, S.; Tee, C.K.; Stoltenberg, R.M.; Chen, H.H.; Barman, S.; Muir, B. Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers. Nat. Mater. 2010, 9, 859–864. [Google Scholar] [CrossRef]
- Liu, S.-Y.; Lu, J.-G.; Shieh, H.-P.D. Influence of Permittivity on the Sensitivity of Porous Elastomer-Based Capacitive Pressure Sensors. IEEE Sens. J. 2018, 18, 1870–1876. [Google Scholar] [CrossRef]
- Lo, P.H.; Hong, C.; Tseng, S.H.; Yeh, J.H.; Fang, W. Implementation of vertical-integrated dual mode inductive-capacitive proximity sensor. In Proceedings of the IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Paris, France, 29 January–2 February 2012; pp. 640–643. [Google Scholar] [CrossRef]
- Lo, P.-H.; Tseng, S.-H.; Yeh, J.-H.; Fang, W. Development of a proximity sensor with vertically monolithic integrated inductive and capacitive sensing units. J. Micromechan. Microeng. 2013, 23, 23. [Google Scholar] [CrossRef]
- Lee, H.-K.; Chang, S.-I.; Yoon, E. Dual-Mode Capacitive Proximity Sensor for Robot Application: Implementation of Tactile and Proximity Sensing Capability on a Single Polymer Platform Using Shared Electrodes. IEEE Sens. J. 2009, 9, 1748–1755. [Google Scholar] [CrossRef]
- Shishido, T.; Sugimachi, M.; Kawaguchi, O.; Miyano, H.; Sunagawa, K. A new method to measure regional myocardial time-varying elastance using minute vibration. Am. J. Physiol. 1998, 274, H1404. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MWCNTs Concentration (%) | Electric Field Treatment Duration (min) | Electric Field Intensity (Volt/cm) |
|---|---|---|
| 3 | 20 | 1800 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yun, Z.; Li, K.; Jiang, H.; Tang, X. A Composite Flexible Sensor for Direct Ventricular Assist Device. Sensors 2022, 22, 2607. https://doi.org/10.3390/s22072607
Yun Z, Li K, Jiang H, Tang X. A Composite Flexible Sensor for Direct Ventricular Assist Device. Sensors. 2022; 22(7):2607. https://doi.org/10.3390/s22072607
Chicago/Turabian StyleYun, Zhong, Kuibing Li, Hao Jiang, and Xiaoyan Tang. 2022. "A Composite Flexible Sensor for Direct Ventricular Assist Device" Sensors 22, no. 7: 2607. https://doi.org/10.3390/s22072607
APA StyleYun, Z., Li, K., Jiang, H., & Tang, X. (2022). A Composite Flexible Sensor for Direct Ventricular Assist Device. Sensors, 22(7), 2607. https://doi.org/10.3390/s22072607