
Detection of Highway Pavement Damage Based on a CNN Using Grayscale and HOG Features

 ,
, 

Abstract
:1. Introduction
2. Methods
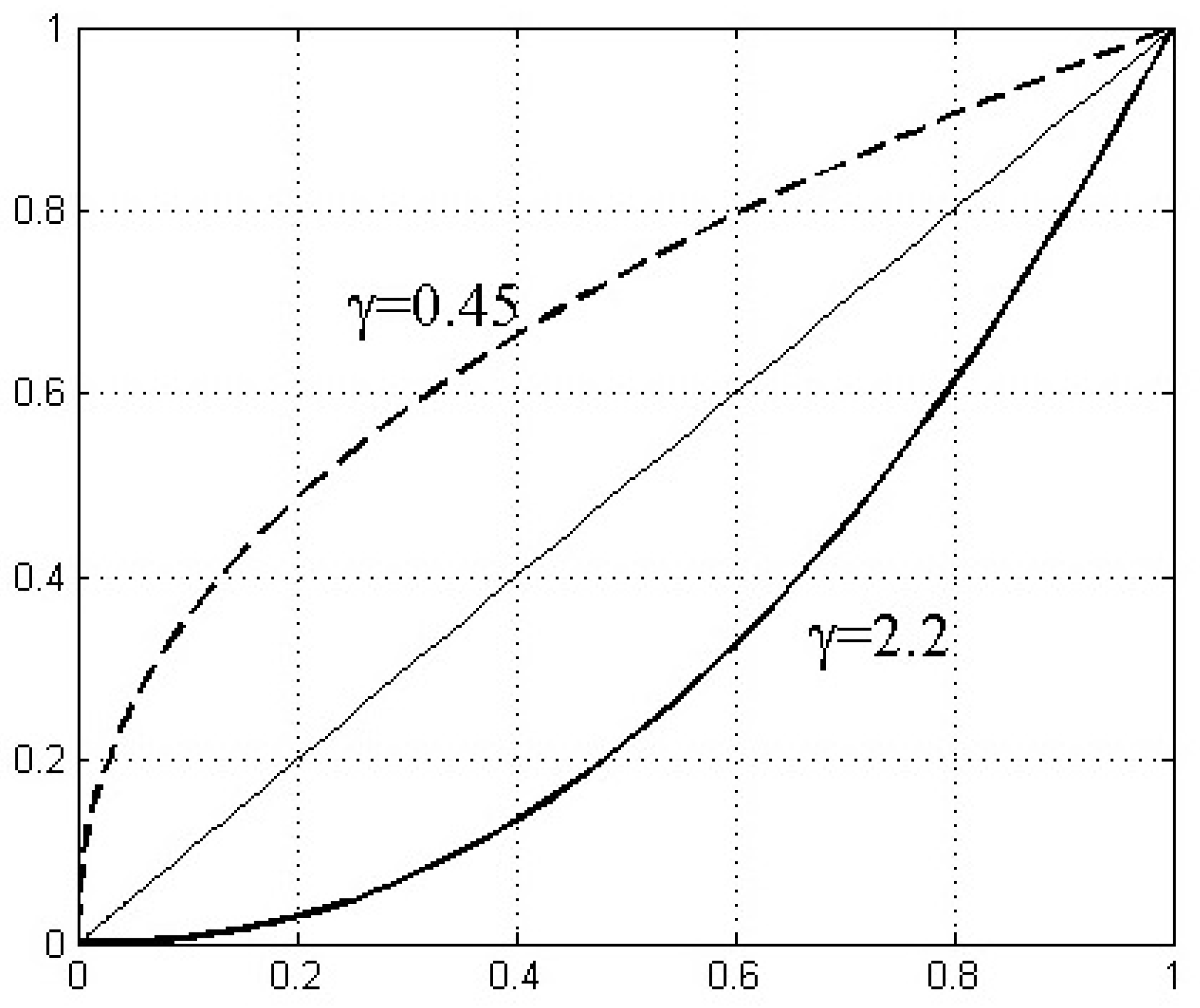
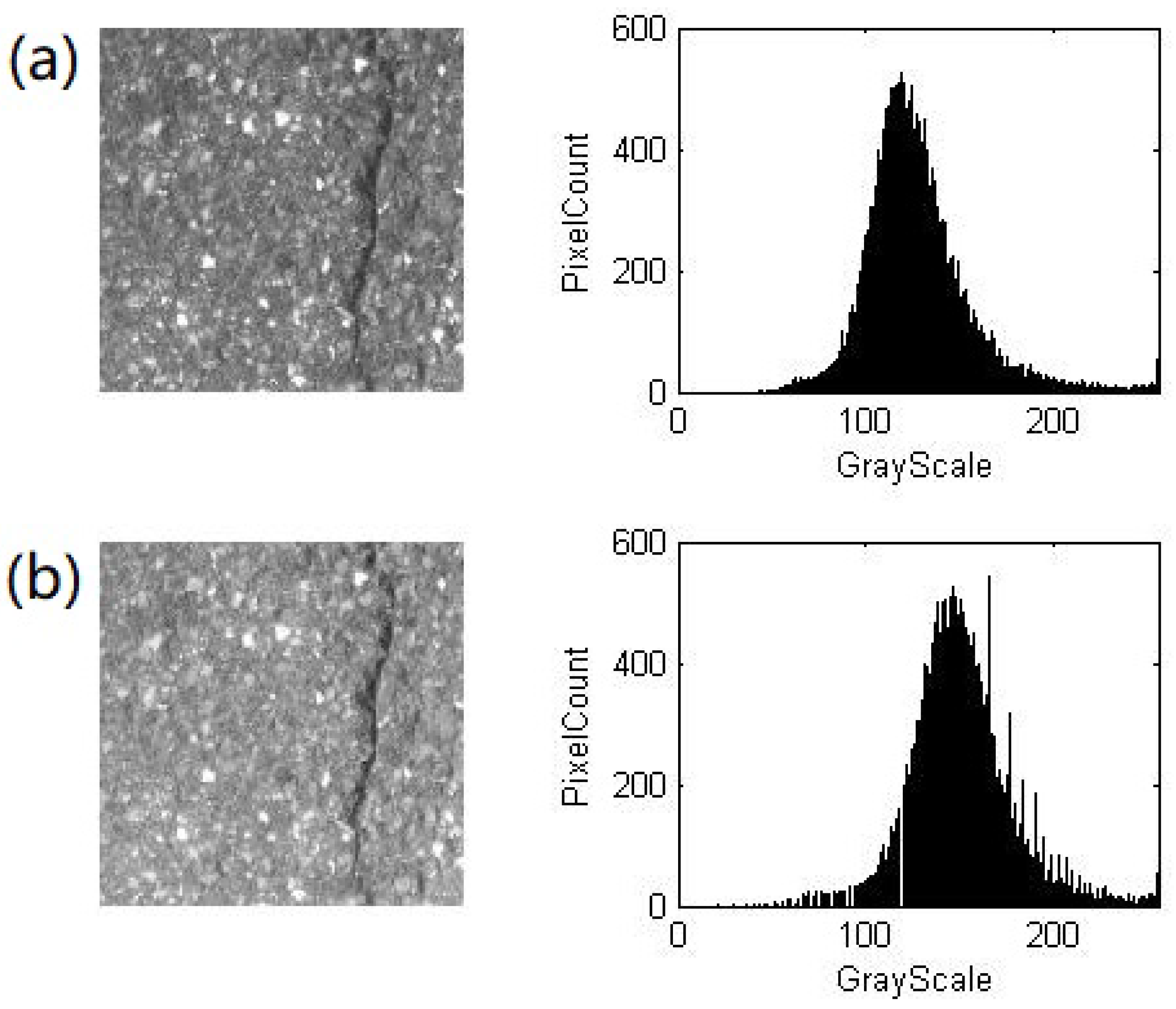
2.1. Image Preprocessing
2.2. Feature Combination of the Grayscale and HOG
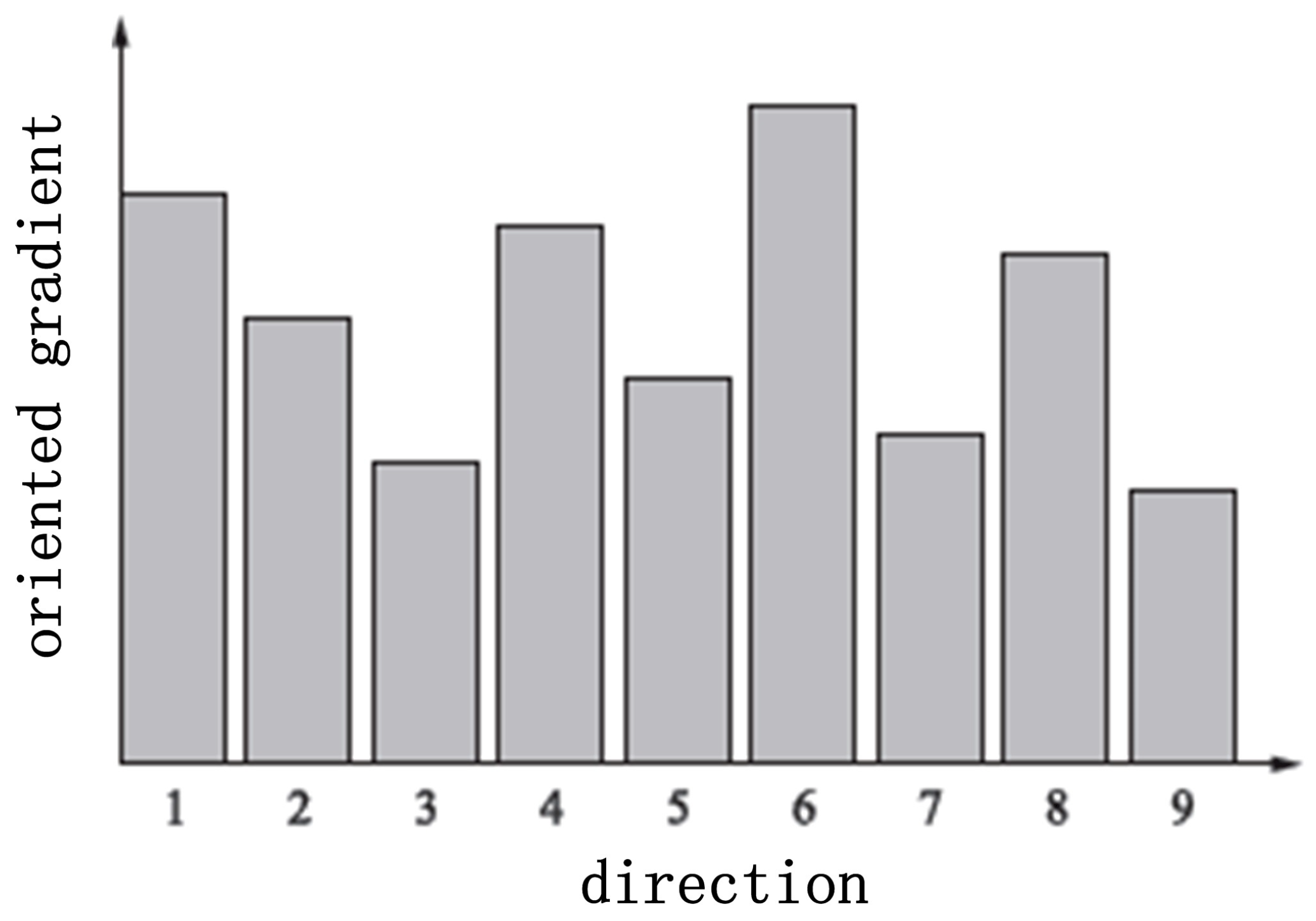
2.2.1. Calculation of the HOG
2.2.2. Grayscale-Weighted Histogram of Gradients
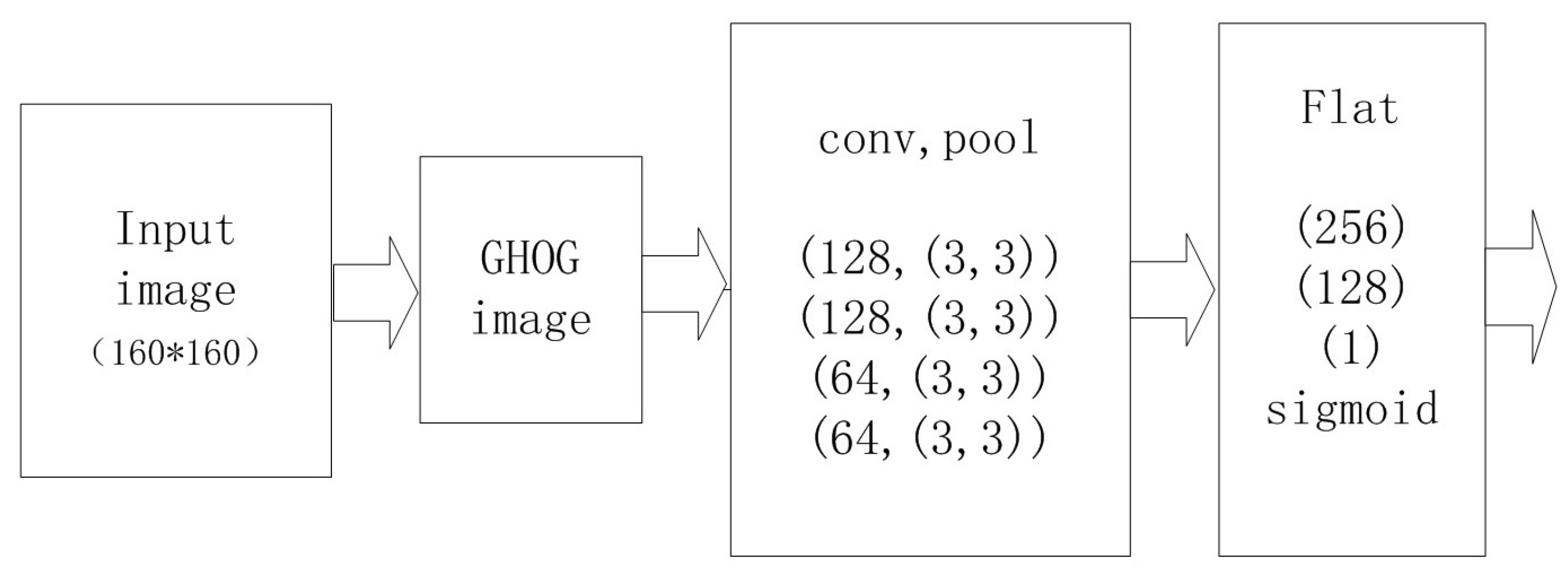
2.3. Design of the CNN Classifier
2.4. Dataset and Performance Indices
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xu, Z.G.; Chen, Y.L.; Li, J.L.; Zhao, X.M.; Pan, Y.; Wang, Z.R.; Song, H.X. Research progress on automatic processing technology for pavement distress. J. Traffic Transp. Eng. 2019, 19, 172–190. [Google Scholar]
- Zhang, D.; Li, Q. A Review of Pavement High detection Technology. J. Geomat. 2015, 40, 1–8. [Google Scholar]
- Chen, H. Deep Learning for Pavement Distress Detection. Ph.D. Thesis, Zhejiang University of Technology, Hangzhou, China, June 2020. [Google Scholar]
- Kheradmandi, N.; Mehranfar, V. A critical review and comparative study on image segmentation-based techniques for pavement crack detection. Constr. Build. Mater. 2022, 321, 126162. [Google Scholar] [CrossRef]
- Fan, Z.; Lin, H.; Li, C.; Su, J.; Bruno, S.; Loprencipe, G. Use of Parallel ResNet for High-Performance Pavement Crack Detection and Measurement. Sustainability 2022, 14, 1825. [Google Scholar] [CrossRef]
- Koch, C.; Brilakis, I. Pothole detection in asphalt pavement images. Adv. Eng. Inform. 2011, 25, 507–515. [Google Scholar] [CrossRef]
- Yang, X.; Li, H.; Yu, Y.; Luo, X.; Huang, T.; Yang, X. Automatic Pixel-Level crack detection and measurement using fully convolutional network. Comput.-Aided. Civ. Inf. 2018, 33, 1090–1109. [Google Scholar] [CrossRef]
- Ukhwah, E.N.; Yuniarno, E.M.; Suprapto, Y.K. Asphalt pavement pothole detection using deep learning method based on YOLO neural network. In Proceedings of the 2019 International Seminar on Intelligent Technology and Its Applications, Surabaya, Indonesia, 6 January 2020; p. 19245668. [Google Scholar]
- Dhiman, A.; Klette, R. Pothole detection using computer vision and learning. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1–15. [Google Scholar] [CrossRef]
- Xiang, X.; Zhang, Y.; Saddik, A.E. Pavement Crack Detection Network Based on Pyramid Structure and Attention Mechanism. IET Image Process. 2020, 14, 1580–1586. [Google Scholar] [CrossRef]
- Anand, S.; Gupta, S.; Darbari, V.; Kohli, S. Crack-pot: Autonomous road crack and pothole detection. In Proceedings of the 2018 Digital Image Computing: Techniques and Applications, Canberra, ACT, Australia, 17 January 2019; p. 18421532. [Google Scholar]
- Ye, W.; Jiang, W.; Tong, Z.; Yuan, D.; Xiao, J. Convolutional neural network for pothole detection in asphalt pavement. Road Mater. Pavement 2021, 22, 42–58. [Google Scholar] [CrossRef]
- Eisenbach, M.; Stricker, R.; Seichter, D.; Amende, K.; Debes, K.; Sesselmann, M.; Ebersbach, D.; Stoeckert, U.; Gross, H.M. How to get pavement distress detection ready for deep learning? A systematic approach. In Proceedings of the 2017 International Joint Conference on Neural Networks, Anchorage, AK, USA, 3 July 2017; p. 17010772. [Google Scholar]
- Yousaf, M.H.; Azhar, K.; Murtaza, F.; Hussain, F. Visual analysis of asphalt pavement for detection and localization of potholes. Adv. Eng. Inform. 2018, 38, 527–537. [Google Scholar]
- Qu, Z.; Cao, C.; Liu, L.; Zhou, D. A Deeply Supervised Convolutional Neural Network for Pavement Crack Detection With Multiscale Feature Fusion. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Xu, G.; Cheng, Y.; Wang, Z.; Wu, Q. Pavement Crack Detection Using Progressive Curvilinear Structure Anisotropy Filtering and Adaptive Graph-Cuts. IEEE Access 2020, 8, 65020–65034. [Google Scholar] [CrossRef]
- Chen, Q.; Huang, Y.; Sun, H.; Huang, W. Pavement crack detection using hessian structure propagation. Adv. Eng. Inform. 2021, 49, 101303. [Google Scholar] [CrossRef]
- Xu, Z.; Zhao, X.; Song, H.; Tao, L.; Na, W. A sphalt pavement crack recognition algorithm based on histogram estimation and shape analysis. Chin. J. Sci. Instrum. 2010, 31, 2260–2266. [Google Scholar]
- Wong, K.K.L. Bridging game theory and knapsack problem. J. Eng. Math. 2015, 91, 177–192. [Google Scholar] [CrossRef]
- Wong, K.K.L. A geometrical perspective for the bargaining problem. PLoS ONE 2010, 5, e1033. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, K.; Zou, C.; Bu, S.; Liang, Y.; Zhang, J.; Gong, M. Multi-modal feature fusion for geographic image annotation. Pattern Recogn. 2018, 73, 1–14. [Google Scholar] [CrossRef]
- Han, G.; Zhu, H. Human Pose Estimation Based on Fusion of HOG and Color Feature. PR&AI 2014, 27, 769–778. [Google Scholar]
- Deb, S.; Tian, Z.; Fong, S.; Wong, R.; Millham, R.; Wong, K.K.L. Elephant search algorithm applied to data clustering. Soft Comput. 2018, 1, 1–12. [Google Scholar] [CrossRef]
- Stricker, R.; Eisenbach, M.; Sesselmann, M.; Debes, K.; Gross, H.M. Improving Visual Road Condition Assessment by Extensive Experiments on the Extended GAPs Dataset. In Proceedings of the 2019 International Joint Conference on Neural Networks, Budapest, Hungary, 30 September 2019; p. 19028302. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layers | Output (Dimensions) | Parameters |
|---|---|---|
| conv2d_4(Conv2D) | (None, 17, 17, 128) | 41,600 |
| max_pooling2d_4(MaxPooling2D) | (None, 16, 16 128) | 0 |
| dropout_6(Dropout) | (None, 16, 16, 128) | 0 |
| conv2d_5(Conv2D) | (None, 14, 14, 128) | 147,584 |
| max_pooling2d_5(MaxPooling2D) | (None, 13, 13, 128) | 0 |
| dropout_7(Dropout) | (None, 13, 13, 128) | 0 |
| conv2d_6(Conv2D) | (None, 12, 12, 64) | 32,832 |
| max_pooling2d_6(MaxPooling2D) | (None, 11, 11, 64) | 0 |
| dropout_8(Dropout) | (None, 11, 11, 64) | 0 |
| conv2d_7(Conv2D) | (None, 10, 10, 64) | 16,448 |
| max_pooling2d_7(MaxPooling2D) | (None, 9, 9, 64) | 0 |
| dropout_9(Dropout) | (None, 9, 9, 64) | 0 |
| flatten_1(Flatten) | (None, 5184) | 0 |
| dense_3(Dense) | (None, 256) | 1,327,360 |
| activation_3(Activation) | (None, 256) | 0 |
| dropout_10(Dropout) | (None, 256) | 0 |
| dense_4(Dense) | (None, 128) | 32,896 |
| activation_4(Activation) | (None, 128) | 0 |
| dropout_11(Dropout) | (None, 128) | 0 |
| dense_5(Dense) | (None, 1) | 129 |
| activation_5(Activation) | (None, 1) | 0 |
| Total parameters: 1,598,849; | ||
| Training parameters: 1,598,849; | ||
| Non-trainable parameters: 0. |
| Feature Pattern | Accuracy | Precision | Recall | F1 |
|---|---|---|---|---|
| HOG | 0.8395 | 0.8466 | 0.7400 | 0.7981 |
| GHOG-1 | 0.9500 | 0.9476 | 0.9286 | 0.9380 |
| GHOG-2 | 0.9463 | 0.9547 | 0.9110 | 0.9385 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, G.-H.; Ni, J.; Chen, Z.; Huang, H.; Sun, Y.-L.; Ip, W.H.; Yung, K.L. Detection of Highway Pavement Damage Based on a CNN Using Grayscale and HOG Features. Sensors 2022, 22, 2455. https://doi.org/10.3390/s22072455
Chen G-H, Ni J, Chen Z, Huang H, Sun Y-L, Ip WH, Yung KL. Detection of Highway Pavement Damage Based on a CNN Using Grayscale and HOG Features. Sensors. 2022; 22(7):2455. https://doi.org/10.3390/s22072455
Chicago/Turabian StyleChen, Guo-Hong, Jie Ni, Zhuo Chen, Hao Huang, Yun-Lei Sun, Wai Hung Ip, and Kai Leung Yung. 2022. "Detection of Highway Pavement Damage Based on a CNN Using Grayscale and HOG Features" Sensors 22, no. 7: 2455. https://doi.org/10.3390/s22072455
APA StyleChen, G.-H., Ni, J., Chen, Z., Huang, H., Sun, Y.-L., Ip, W. H., & Yung, K. L. (2022). Detection of Highway Pavement Damage Based on a CNN Using Grayscale and HOG Features. Sensors, 22(7), 2455. https://doi.org/10.3390/s22072455