
Research on High Sensitivity Oil Debris Detection Sensor Using High Magnetic Permeability Material and Coil Mutual Inductance

 ,
, 
 and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
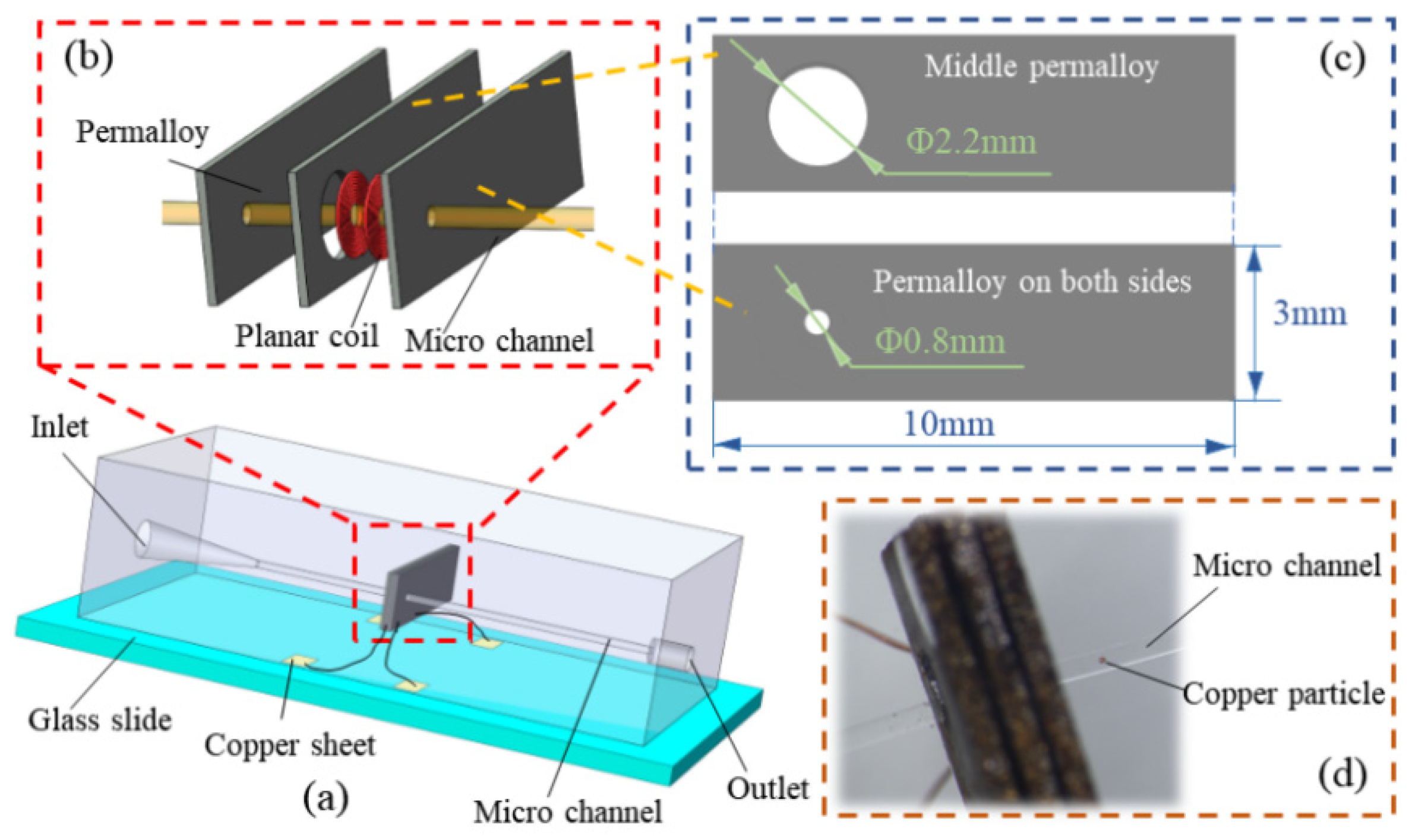
2. Sensor Design and Manufacturing Process
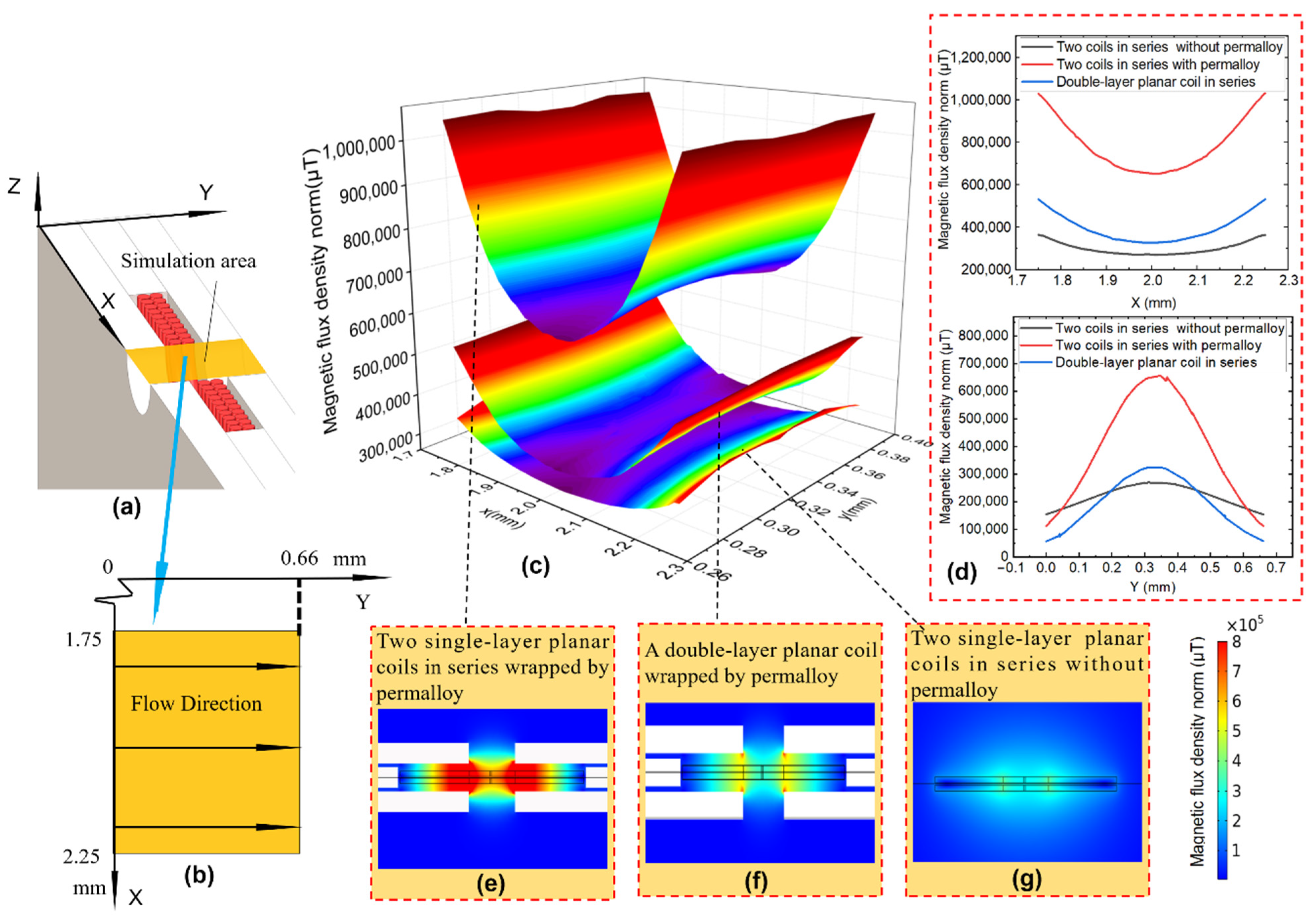
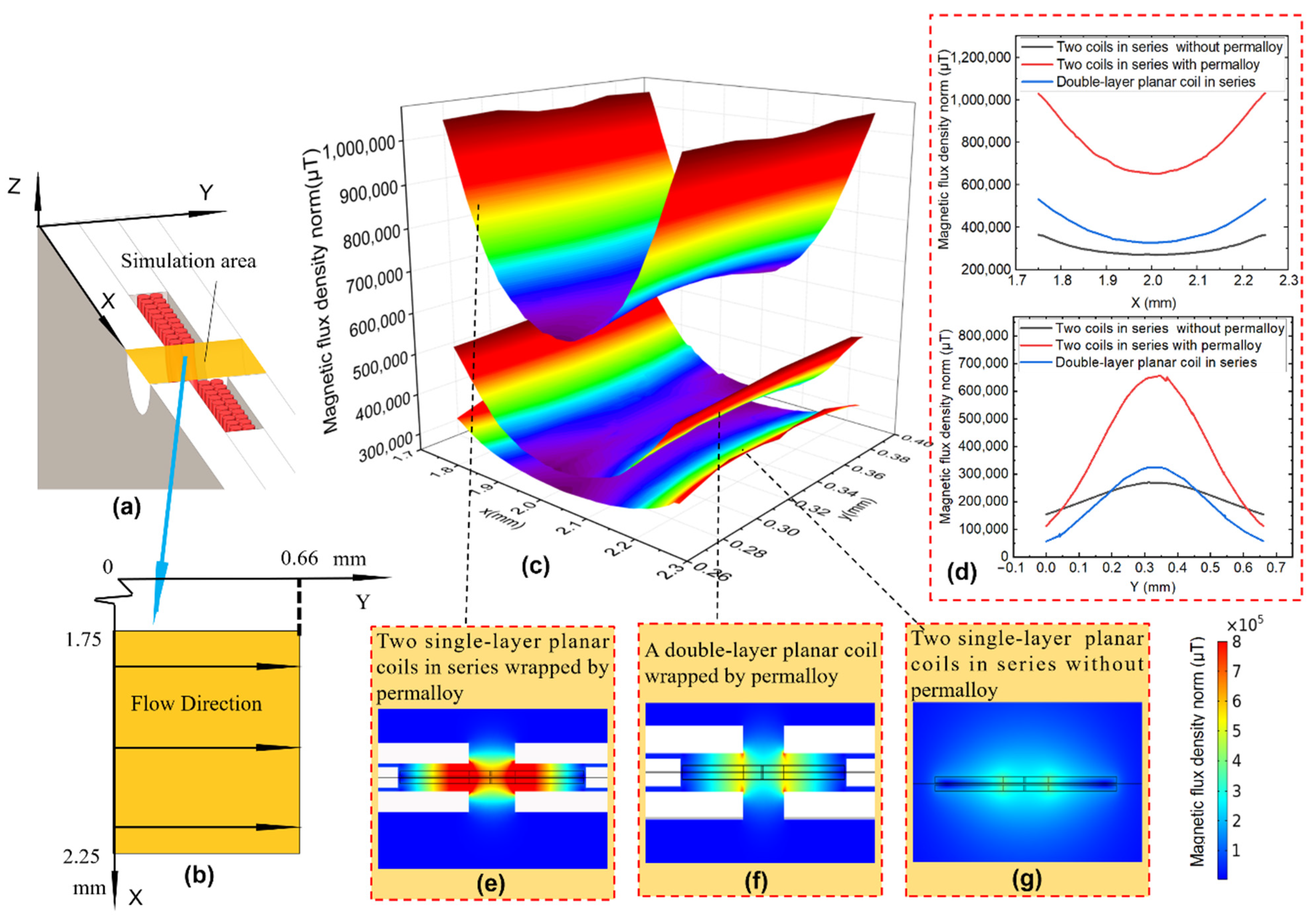
3. Detection Principle and Simulation Analysis
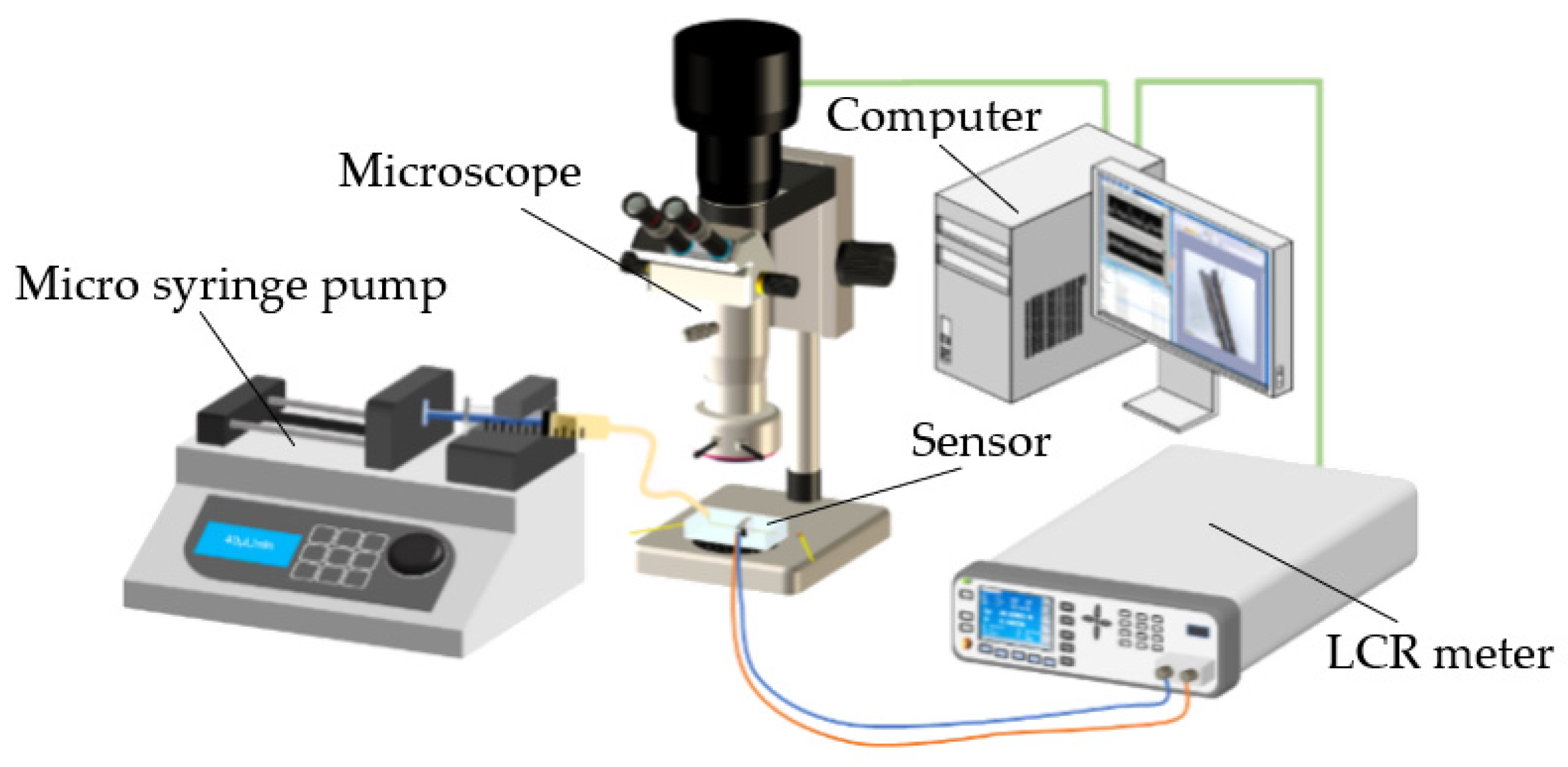
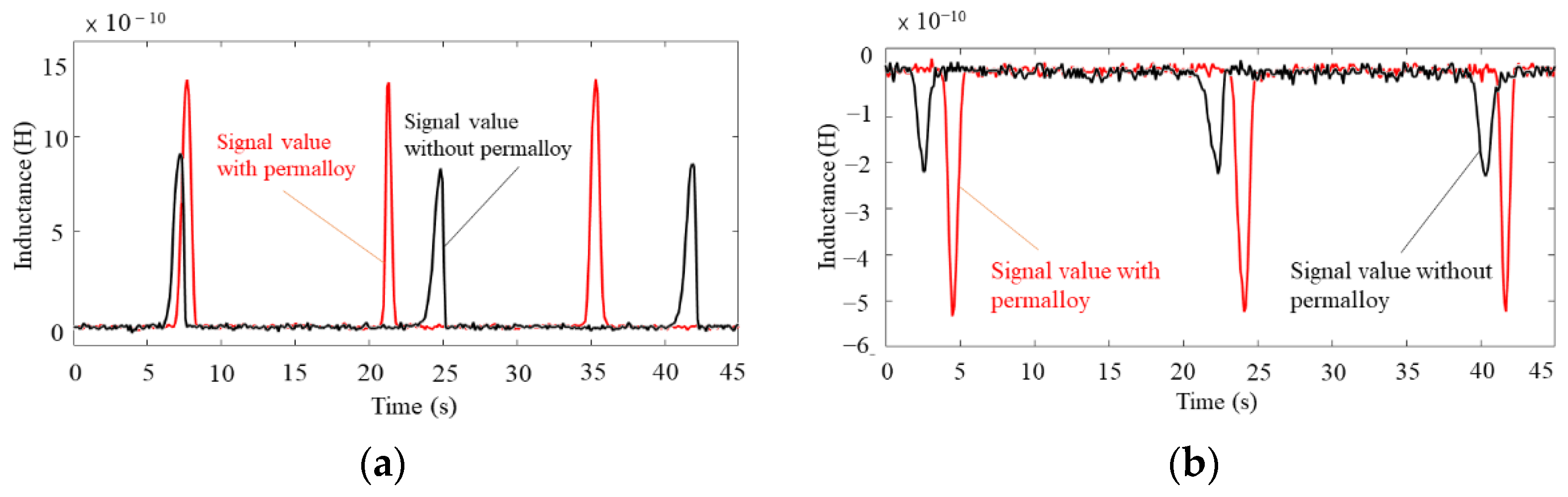
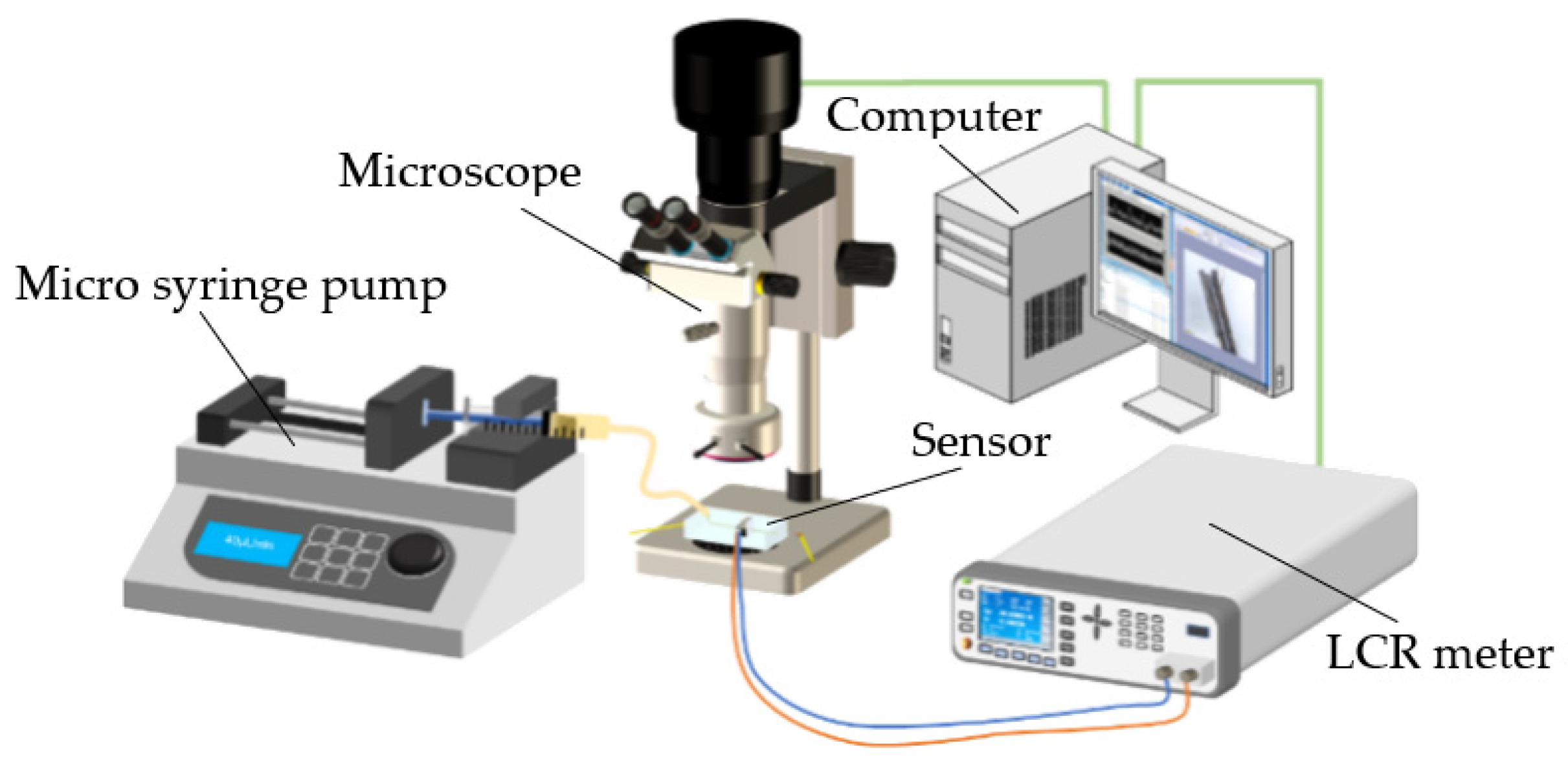
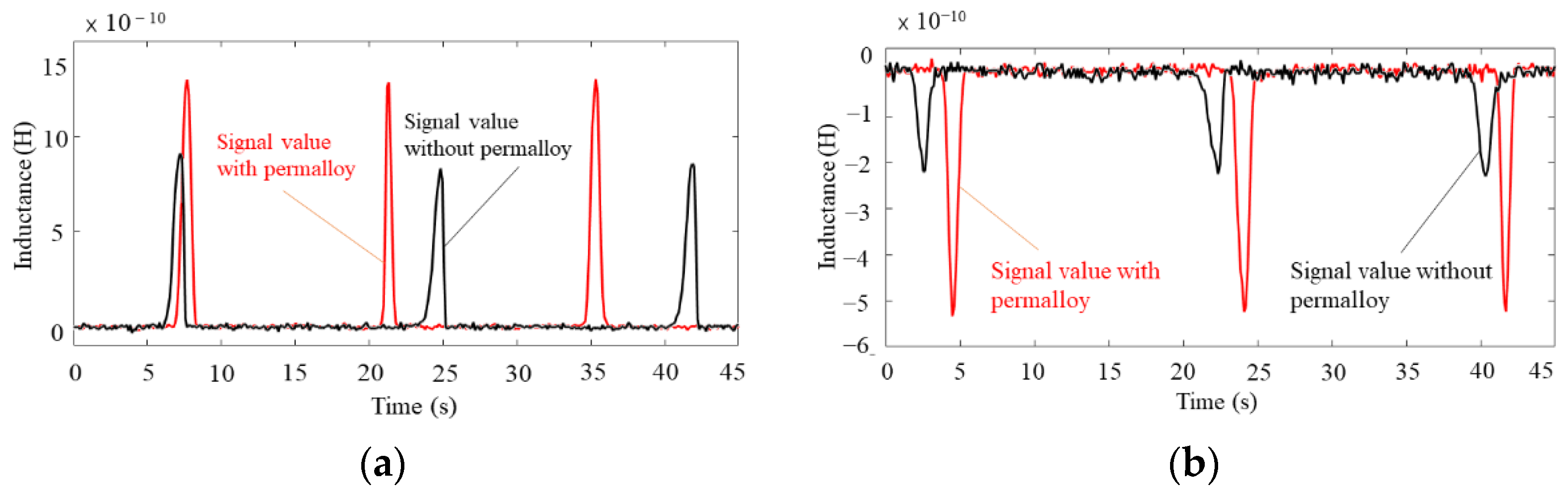
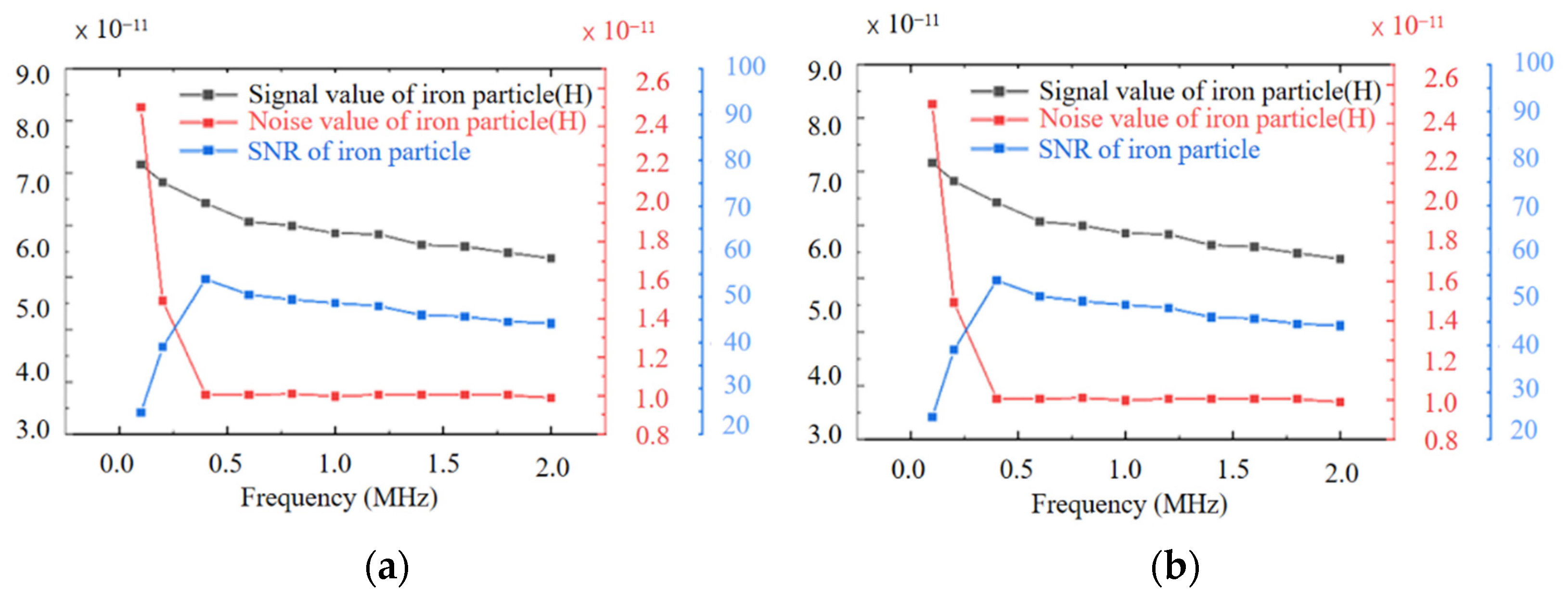
4. Experiment and Data Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fouvry, S.; Liskiewicz, T.; Kapsa, P.; Hannel, S.; Sauger, E. An energy description of wear mechanisms and its applications to oscillating sliding contacts. Wear 2003, 255, 287–298. [Google Scholar] [CrossRef] [Green Version]
- Ren, Y.; Li, W.; Zhao, G.; Feng, Z. Inductive debris sensor using one energizing coil with multiple sensing coils for sensitivity improvement and high throughput. Tribol. Int. 2018, 128, 96–103. [Google Scholar] [CrossRef]
- Zhu, X.; Zhong, C.; Zhe, J. Lubricating oil conditioning sensors for online machine health monitoring—A review. Tribol. Int. 2017, 109, 473–484. [Google Scholar] [CrossRef] [Green Version]
- Huttunen-Saarivirta, E.; Heino, V.; Vaajoki, A.; Hakala, T.; Ronkainen, H. Wear of additively manufactured tool steel in contact with aluminium alloy. Wear 2019, 432, 202934. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, Q. Investigation of the design and fault prediction method for an debris sensor used in wind turbine gearbox. Energies 2020, 13, 365. [Google Scholar] [CrossRef] [Green Version]
- Kumar, M.; Mukherjee, P.S.; Misra, N.M. Advancement and current status of wear debris analysis for machine condition monitoring: A review. Ind. Lubr. Tribol. 2013, 65, 3–11. [Google Scholar] [CrossRef]
- Sun, W. Quantitative estimation technique for wear amounts by real time measurement of wear debris in lubricating oil. Adv. Mater. Res. 2011, 308, 647–650. [Google Scholar] [CrossRef]
- Jiang, Z.; Zuo, H.; Wang, H.; Guo, J. Oil detection method for dynamic wear particle target based on microfluidics. J. Ordnance Equip. Eng. 2019, 40, 166–170. [Google Scholar]
- Miller, J.G.; Clark, R.E.; Conradi, M.S.; Dietz, D.R.; Heyman, J.S. Ultrasonic Continuous Wave Particle Monitor. U.S. Patent 4,015,464, 5 April 1977. [Google Scholar]
- Du, L.; Zhe, J. An integrated ultrasonic-inductive pulse sensor for wear debris detection. Smart Mater. Struct. 2013, 22, 22. [Google Scholar] [CrossRef]
- Xu, C.; Zhang, P.; Wang, H.; Li, Y.; Lv, C. Ultrasonic echo waveshape features extraction based on QPSO-matching pursuit for online wear debris discrimination. Mech. Syst. Signal Pract. 2015, 60, 301–315. [Google Scholar] [CrossRef]
- Isgor, P.K.; Marcali, M.; Keser, M.; Elbuken, C. Microfluidic droplet content detection using intergrated capacitive sansors. Sens. Actuators B Chem. 2015, 210, 669–675. [Google Scholar] [CrossRef] [Green Version]
- Back, D.; Theisen, D.; Seo, W.; Tsai, C.; Janes, D. Development of interdigitated capacitive sensor for real-time monitoring of sub-micron and nanoscale particulate matters in personal sampling device for mining environment. IEEE Sens. J. 2020, 20, 11588–11597. [Google Scholar] [CrossRef]
- Patocka, F.; Schneidhofer, C.; Doerr, N.; Schneider, M.; Schmid, U. Novel resonant MEMS sensor for the detection of particles with dielectric properties in aged lubricating oils. Sens. Actuators A Phys. 2020, 315, 112290. [Google Scholar] [CrossRef]
- Du, L.; Zhu, X.; Han, Y.; Zhe, J. High throughput wear debris detection in lubricants using a resonance frequency division multiplexed sensor. Tribol. Lett. 2013, 51, 453–460. [Google Scholar] [CrossRef]
- Miller, J.L.; Kitaljevich, D. In-line oil debris monitor for aircraft engine condition assessment. In Proceedings of the 2000 IEEE Aerospace Conference (Cat. No. 00TH8484), Big Sky, MT, USA, 25 March 2000. [Google Scholar]
- Zhang, J.; Drinkwater, B.; Dwyer-Joyce, R. Monitoring of lubricant film failure in a ball bearing using ultrasound. J. Tribol. ASME 2006, 128, 612–618. [Google Scholar] [CrossRef]
- Lombardo, L.; Parvis, M.; Angelini, E.; Grassini, S. An optical sampling system for distributed atmospheric particulate matter. IEEE Trans. Instrum. Meas. 2019, 68, 2396–2403. [Google Scholar] [CrossRef]
- Zarepour, H.; Yeo, S. Single debris impingements as a benchmark to determine material removal modes in micro ultrasonic machining. Wear 2012, 288, 1–8. [Google Scholar] [CrossRef]
- Potyrailo, R.; Tokarev, I.; Go, S.; Ottikkutti, P.; Kuzhiyil, N.; Mihok, J.; Anzini, C.; Shartzer, S. Multivariable electrical resonant sensors for independent quantitation of aging and external contaminants in lubricating oils. IEEE Sens. J. 2019, 19, 1542–1553. [Google Scholar] [CrossRef]
- Xiao, Z.; Hu, W.; Liu, C.; Yu, H.; Li, C. Noncontact human-machine interface with planar probing coils in a differential sensing architecture. IEEE Trans. Instrum. Meas. 2018, 67, 956–964. [Google Scholar] [CrossRef]
- Ma, L.; Zhang, H.; Qiao, W.; Han, X.; Zeng, L.; Shi, H. Oil metal debris detection sensor using ferrite core and flat channel for sensitivity improvement and high throughput. IEEE Sens. J. 2020, 20, 7303–7309. [Google Scholar] [CrossRef]
- Feng, S.; Yang, L.; Qiu, G.; Luo, J.; Li, R.; Mao, J. An inductive debris sensor based on a high-gradient magnetic field. IEEE Sens. J. 2019, 19, 2879–2886. [Google Scholar] [CrossRef]
- Wang, X.; Chen, P.; Luo, J.; Yang, L.; Feng, S. Characteristics and superposition regularity of aliasing signal of an inductive debris sensor based on a high-gradient magnetic field. IEEE Sens. J. 2020, 20, 10071–10078. [Google Scholar] [CrossRef]
- Xiao, H.; Zhou, W.; Luo, J.; Tan, F.; Feng, S. An inductive sensor based on the high-gradient static magnetic field for full flow debris monitoring. Chin. J. Sci. Instrum. 2020, 41, 10–18. [Google Scholar]
- Ren, Y.; Zhao, G.; Qian, M.; Feng, Z. A highly sensitive triple-coil inductive debris sensor based on an effective unbalance compensation circuit. Meas. Sci. Technol. 2019, 30, 015108. [Google Scholar] [CrossRef]
- Li, Y.; Wu, J.; Guo, Q. Electromagnetic sensor for detecting wear debris in lubricating oil. IEEE T. Instrum. Meas. 2020, 69, 2533–2541. [Google Scholar] [CrossRef]
- Liu, L.; Chen, L.; Wang, S.; Yin, Y.; Liu, D.; Wu, S.; Liu, Z.; Pan, X. Improving sensitivity of a micro inductive sensor for wear debris detection with magnetic powder surrounded. Micromachines 2019, 10, 440. [Google Scholar] [CrossRef] [Green Version]
- Bai, C.; Zhang, H.; Zeng, L.; Zhao, X.; Ma, L. Inductive magnetic nanoparticle sensor based on microfluidic chip oil detection technology. Micromachines 2020, 11, 183. [Google Scholar] [CrossRef] [Green Version]
- Qian, M.; Ren, Y.; Zhao, G.; Feng, Z. Ultrasensitive inductive debris sensor with a two-stage autoasymmetrical compensation circuit. IEEE Trans. Ind. Electron. 2021, 68, 8885–8893. [Google Scholar] [CrossRef]
- Yin, Y.; Yan, X.; Xiao, H. Research on magnetic field uniformity of inductive wear debris monitoring sensor. Tribology 2001, 21, 228–231. [Google Scholar]
- Du, L.; Zhe, J. A high throughput inductive pulse sensor for online oil debris monitoring. Tribol. Int. 2011, 44, 175–179. [Google Scholar] [CrossRef]
- Guo, C.; Ma, X.; Rong, F.; Xu, W. Design of the induction sensor for on-line oil debris monitoring based on planar coil. Chin. J. Sens. Actuators 2019, 32, 212–216. [Google Scholar]
- Shi, H.; Zhang, H.; Huo, D.; Yu, S.; Su, J.; Xie, Y.; Li, W.; Ma, L.; Chen, H.; Sun, Y. An Ultrasensitive microsensor based on impedance analysis for oil condition monitoring. IEEE Trans. Ind. Electron. 2021, 69, 7441–7450. [Google Scholar] [CrossRef]
- Myshkin, N.; Markova, L. On-Line Condition Monitoring in Industrial Lubrication and Tribology; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Markova, L. Diagnostics of the wear of tribological assemblies using an inductive wear debris counter. J. Frict. Wear 2018, 39, 265–273. [Google Scholar] [CrossRef]
- Li, X.; Sun, X.; Wang, J.; Liu, Q. Magnetic properties of permalloy films with different thicknesses deposited onto obliquely sputtered Cu underlayers. Magn. Mater. 2015, 377, 142–146. [Google Scholar] [CrossRef]
- Li, W.; Bai, C.; Wang, C.; Zhang, H.; Ilerioluwa, L.; Wang, X.; Yu, S.; Li, G. Design and research of inductive oil pollutant detection sensor based on high gradient magnetic field structure. Micromachines 2021, 12, 638. [Google Scholar] [CrossRef]
- Bai, C.; Zhang, H.; Zeng, L.; Zhao, X.; Yu, Z. High-throughput sensor to detect hydraulic oil contamination based on microfluidics. IEEE Sens. J. 2019, 19, 8590–8596. [Google Scholar] [CrossRef]
- Zhang, X.; Zeng, L.; Zhan, H.; Huang, S. Magnetization Model and Detection Mechanism of a Microparticle in a Harmonic Magnetic Field. IEEE ASME Trans. Mechatron. 2019, 24, 1882–1892. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Bai, C.; Yang, Z.; Zhang, H.; Li, W.; Wang, X.; Zheng, Y.; Ilerioluwa, L.; Sun, Y. Research on High Sensitivity Oil Debris Detection Sensor Using High Magnetic Permeability Material and Coil Mutual Inductance. Sensors 2022, 22, 1833. https://doi.org/10.3390/s22051833
Wang C, Bai C, Yang Z, Zhang H, Li W, Wang X, Zheng Y, Ilerioluwa L, Sun Y. Research on High Sensitivity Oil Debris Detection Sensor Using High Magnetic Permeability Material and Coil Mutual Inductance. Sensors. 2022; 22(5):1833. https://doi.org/10.3390/s22051833
Chicago/Turabian StyleWang, Chengjie, Chenzhao Bai, Zhaoxu Yang, Hongpeng Zhang, Wei Li, Xiaotian Wang, Yiwen Zheng, Lebile Ilerioluwa, and Yuqing Sun. 2022. "Research on High Sensitivity Oil Debris Detection Sensor Using High Magnetic Permeability Material and Coil Mutual Inductance" Sensors 22, no. 5: 1833. https://doi.org/10.3390/s22051833
APA StyleWang, C., Bai, C., Yang, Z., Zhang, H., Li, W., Wang, X., Zheng, Y., Ilerioluwa, L., & Sun, Y. (2022). Research on High Sensitivity Oil Debris Detection Sensor Using High Magnetic Permeability Material and Coil Mutual Inductance. Sensors, 22(5), 1833. https://doi.org/10.3390/s22051833