1. Introduction
Unmanned Aerial Vehicles (UAVs) have recently become an interesting research topic, due to their strong survivability in many activities such as agricultural, commercial, military, and civilian [
1,
2,
3,
4]. To achieve repetitive and hard missions in dangerous environments, path planning is a key task in the UAVs’ control system [
5,
6,
7,
8]. The purpose of drones’ path planning is not only to find a collision-free path to reach the target but also to select an optimal flyable path that minimizes some critical goals.
The complexity and hardness of UAVs’ path planning problems are increased due to the increase in optimization factors such as UAV restrictions and environmental restrictions. To deal with this complexity, researchers have gradually moved from using the conventional to non-conventional planning approaches considered more effective. In study [
9], the authors proposed an improved Particle Swarm Optimization (PSO) algorithm, by introducing the competition strategy formalism, to solve the 3D path planning for fixed-wing UAVs. In study [
10], Jamshidi et al. described a CAN bus-based implementation of an asynchronous distributed multi-master parallel Genetic Algorithm (GA) and PSO metaheuristics to improve the performance and computational time of the UAV path planning task. A path planning approach based on the Water Cycle Algorithm (WCA) to find the optimal or near-optimal path avoiding all obstacles in 2D environments is proposed in [
11]. The authors in [
12] proposed a comprehensively improved particle swarm optimization to enhance the optimality and rapidity of automatic path planners for autonomous UAV formation systems. In studies [
13,
14], the authors proposed a new methodology to discover the UAV optimal path planning based on a Multiobjective Multi-Verse Algorithm (MOMVA). The authors in [
15] proposed a novel approach to solve the UAV path planning based on a Grey Wolf Optimizer (GWO) by proper choice of optimization models such as the objective function for targets and constraints for obstacles’ avoidance. In study [
16], another GWO-based method is proposed to solve the UAV path planning problem formulated as a hard optimization problem under operational constraints in terms of path shortness and smoothness as well as avoidance of obstacles. In the same work, the performance of the proposed parameters-free GWO algorithm is compared to other homologous metaheuristics such as the Crow Search Algorithm (CSA), Differential Evolution (DE), Salp Swarm Algorithm (SSA), and others. In study [
17], the researchers proposed an improved Adaptive Grey Wolf Optimization (AGWO) algorithm to solve the 3D path planning of UAVs in a complex environment of material delivery in earthquake-stricken areas. Such an algorithm runs with an adaptive convergence factor and updated positions of the search agents. In study [
18], a multi-population Chaotic Grey Wolf Optimizer (CGWO)-based method is investigated to solve the 3D UAVs’ cooperative path planning problem. A chaotic search strategy is introduced in this algorithm to improve the exploration/exploitation capabilities of the search behavior. In study [
19], Kumar et al. described a modified version of the conventional GWO algorithm (MGWO) to design and optimize suitable paths for autonomous robots.
Such an above study was carried out to arouse the interest in the GWO algorithm widely applied in the field of UAVs’ path planning. The advantages in terms of simplicity of software implementation, reduced number of the algorithm’s control parameters, and convergence fastness make the GWO one of the most extensively used algorithms in the past three years [
20,
21,
22,
23]. The increased number of scientific publications on this topic explains the effectiveness of such a stochastic and parameters-free algorithm for solving various optimization problems. However, it should be pointed out that the GWO algorithm is often unable to escape trapping in local minima and presents a premature convergence, especially for the Large-Scale Global Optimization (LSGO) problems. Like most metaheuristics algorithms, the GWO suffers from the “dimensionality curse” and often fails to solve these hard optimization problems [
17]. Thus, a practical implementation of such a metaheuristic algorithm presents a challenge in real-world applications due to its prohibitive computational time and weakness concerning an increased number of decision variables of optimization. Although the cited works [
15,
16,
17,
18,
19] have been developed to solve the UAVs’ path planning problem based on a GWO algorithm, most of them formulated the planning problem with a small number of decision variables. Since the real-world planning tasks are considered LSGO problems, the quantity of computation increases strongly with the increase of the search space dimension, which implies a high probability of converging towards the local optimum [
24]. These limits present a serious challenge for the real-time implementation of such an algorithm to design flyable and collision-free UAV paths.
To overcome these difficulties, the cooperative co-evolutionary concept of optimization seems an interesting idea to further improve the use of GWO algorithms for LSGO problems, particularly in UAVs’ path planning formalism. Such a design approach presents an effective tools’ panoply for solving hard problems thanks to its decomposition of optimization problems into smaller-dimension sub-components. It is a “divide and conquer” strategy initially proposed by Potter and De Jong in [
25]. In the literature, the cooperative coevolutionary approach has been successfully applied for various optimization algorithms such as GA [
26], PSO [
27], DE [
28], Simulated Annealing (SA) [
29], Ant Colony Optimization (ACO) [
30,
31], Firefly algorithm [
32], and many others. On the other hand, a large quantity of evaluation, due to the large number of problem decision variables, also implies an increased prohibitive computation time. However, online implementation of the standard GWO algorithm for a real-time path planning problem can be failed or at least become ineffective to achieve the desired performance of planning. To overcome this computation constraint, the parallelization concept can be introduced to reduce the complexity of the planning tasks and further increase the computational time of the investigated GWO algorithm.
Over the past decades, there has been a growing interest in the parallelization of metaheuristics algorithms [
33,
34,
35,
36,
37,
38,
39,
40]. Such advanced mechanisms for computation accelerating and enhancement greatly contribute to the success of metaheuristics for solving hard and large-scale optimization problems. In the literature, many types of metaheuristics algorithms have been recently parallelized based on different architectures and hardware resources. The Graphics Processing Units (GPUs) and multi-core Central Processing Units (CPUs)-based techniques are the most extensively proposed approaches. In study [
33], a model of a vector parallel’s Ant Colony Optimization (ACO) algorithm is proposed using a multi-core SIMD CPU architecture. Each ant is mapped with a CPU core and the tour construction is accelerated by vector instructions. In study [
34], a parallel heterogeneous ensemble feature selection method based on the three genetic (GA), particle swarm (PSO), and grey wolf (GWO) metaheuristics is proposed to enhance the performance of machine learning formalism. The hardware implementation is achieved on a multi-core CPU with GPU. In study [
35], a parallel GA algorithm on GPU is investigated and compared to a sequential execution on CPU for wireless sensor data acquisition using a team of unmanned aerial vehicles. In study [
36], an island model-based parallel GA is proposed and implemented on a GPU for solving the unequal area facility layout problem. In study [
37], a comprehensive survey on parallel PSO algorithms is presented along with their strategies and applications. Several platforms and models, mainly the CPU- and GPU-based parallelization strategies, have been described and discussed. Another comprehensive survey on the parallel implementation of metaheuristics but within a multi-objective evolutionary framework is presented in [
38]. An up-to-date review of methods and key contributions to such a research field are described. Other various techniques and strategies of metaheuristics parallelization are described and discussed in [
39,
40].
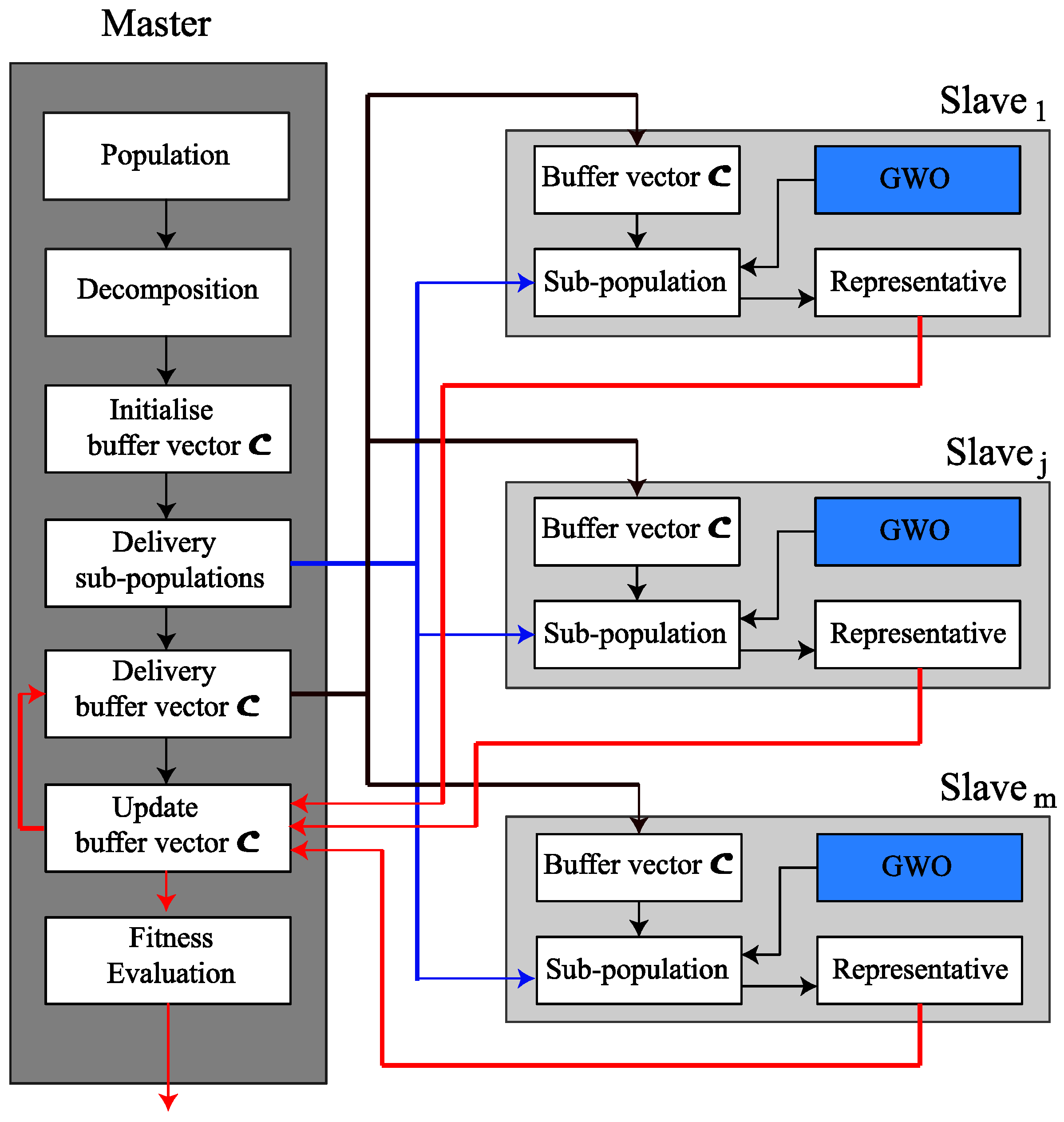
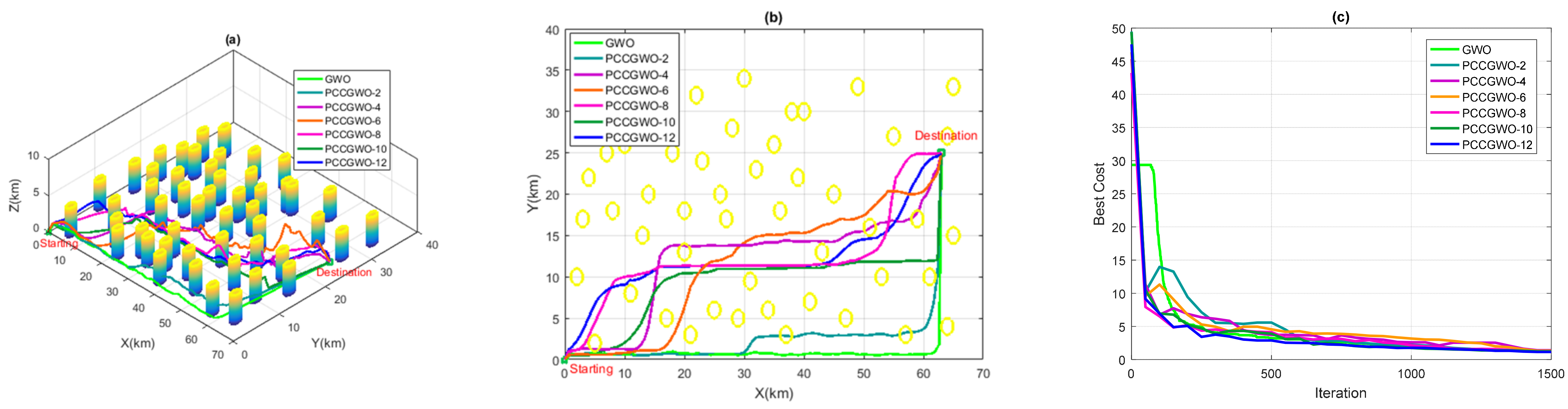
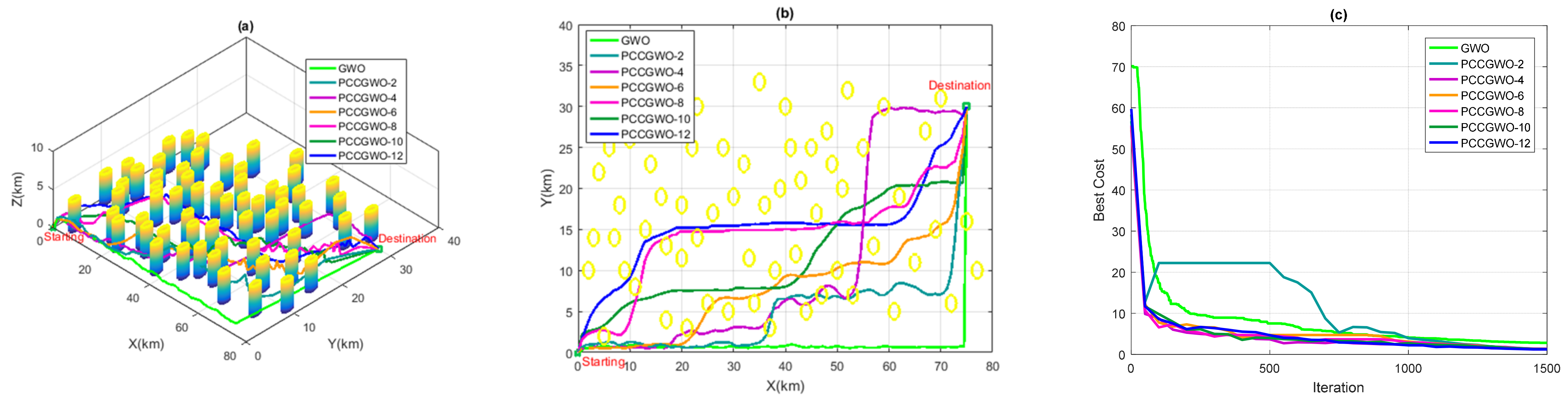
Based on these observations, the idea of using the parameters-free GWO algorithm, improved with the two concepts of cooperative coevolutionary and parallel computing, remains a promising and encouraging solution to solve the UAVs’ path planning problems. Indeed, in real-world UAVs’ planning applications, the most suited planners are those with fewer tuning of the effective parameters and a high fastness of the computation processing concerning the dynamics of navigation and software/hardware specifications of embedded control units. High performances in terms of computation speediness, shorter and collision-free flyable paths are always requested and recommended. In this work, a new Parallel Cooperative Coevolutionary Grey Wolf Optimizer (PCCGWO) is proposed and successfully applied in solving the UAVs’ path planning problem over large benchmarks and instances of navigation. Such an improved GWO algorithm combines the cooperative coevolutionary and parallelization mechanisms to ensure an efficient partition of the original large-scale search space into multiple sub-spaces with reduced dimensions. The decomposition of the decision variables vector into several sub-components is achieved and multi-swarms are created from the initial population to be later assigned to optimize a part of the path planning procedure formulated as an LSGO problem. The main contributions of this paper are summarized as follows: (1) an intelligent and efficient path planning strategy is elaborated to guide UAV drones to reach the destination position while avoiding a high number of obstacles and threats. (2) A novel parameters-free PCCGWO algorithm based on an efficient parallelization master-slave mechanism is proposed and successfully applied to solve the UAVs’ path planning problem over several flight scenarios. (3) A nonparametric statistical analysis in the sense of Friedman and post hoc tests is carried out to show the effectiveness and superiority of the proposed PCCGWO-based path planning approach.
The remainder of this paper is organized as follows. In
Section 2, the path planning problem for unmanned aerial vehicles is formulated as a constrained large-scale optimization problem.
Section 3 presents the proposed parallel cooperative coevolutionary grey wolf optimizer as well as its designed master-slave architecture. A pseudo-code of the proposed PCCGWO algorithm is given to solve the formulated UAVs’ path planning problem. In
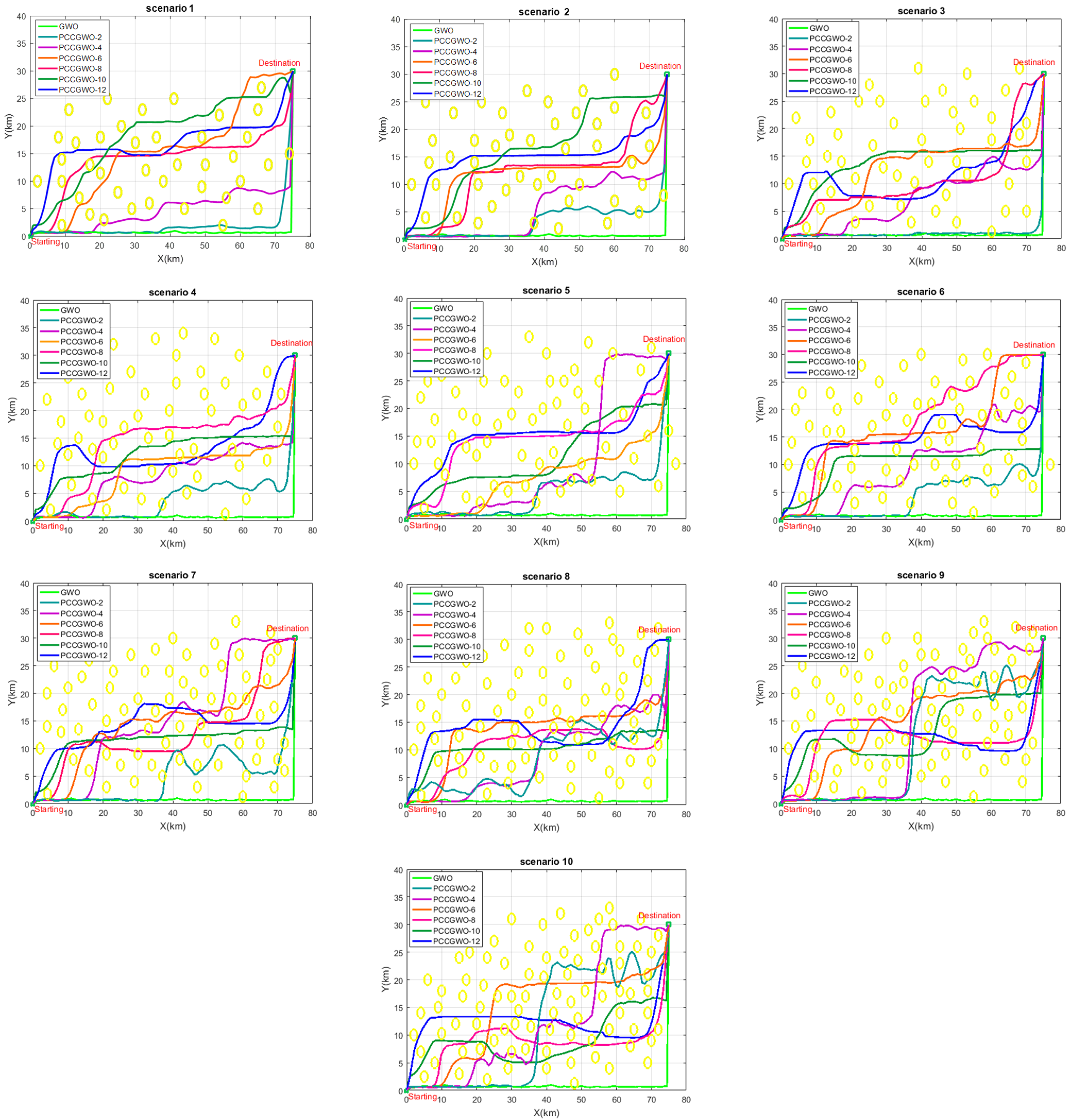
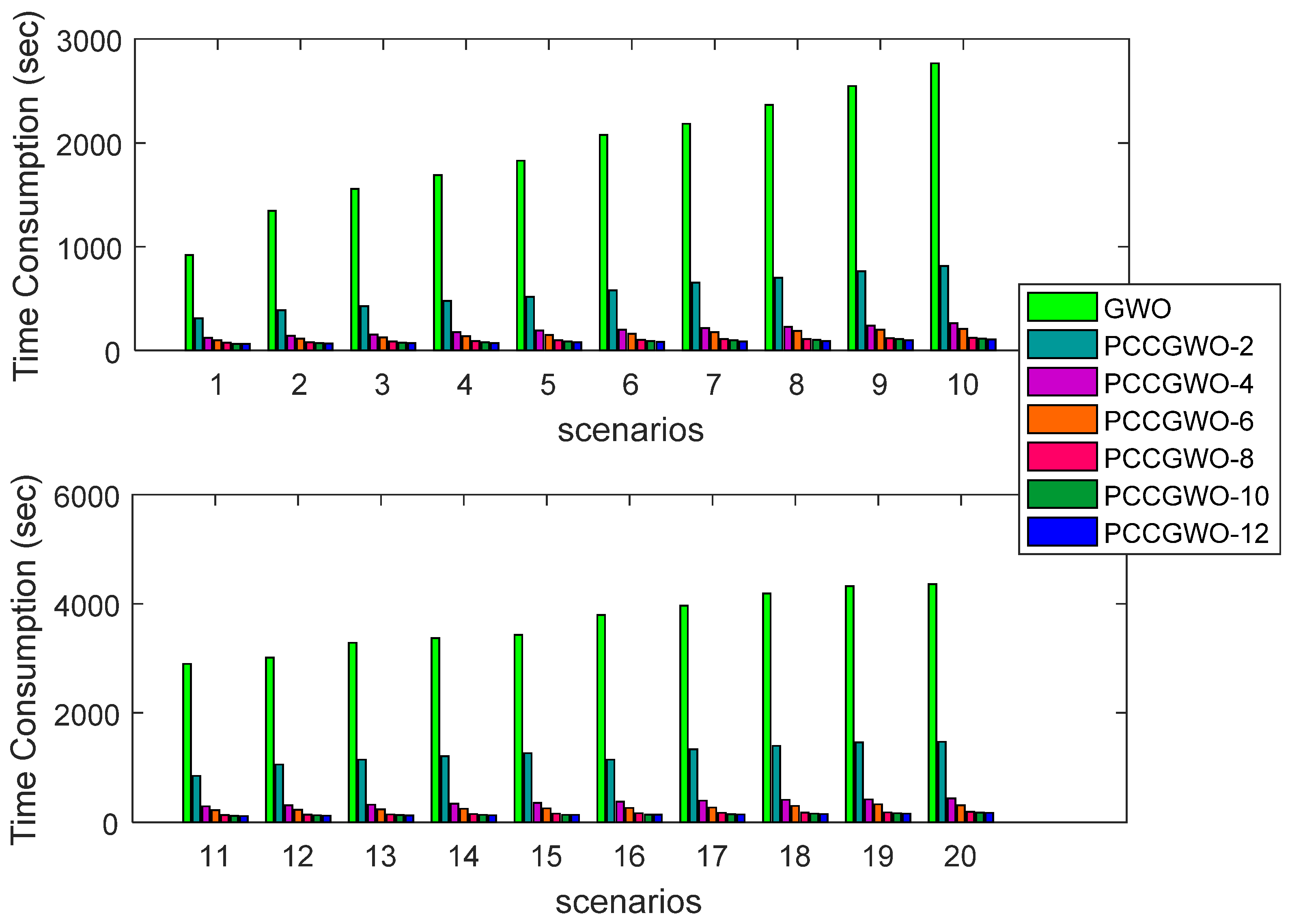
Section 4, demonstrative results over 20 different flight scenarios are carried out and discussed to assess the effectiveness of the proposed planning approach.
Section 5 concludes this paper.
2. Path Planning Problem Formulation
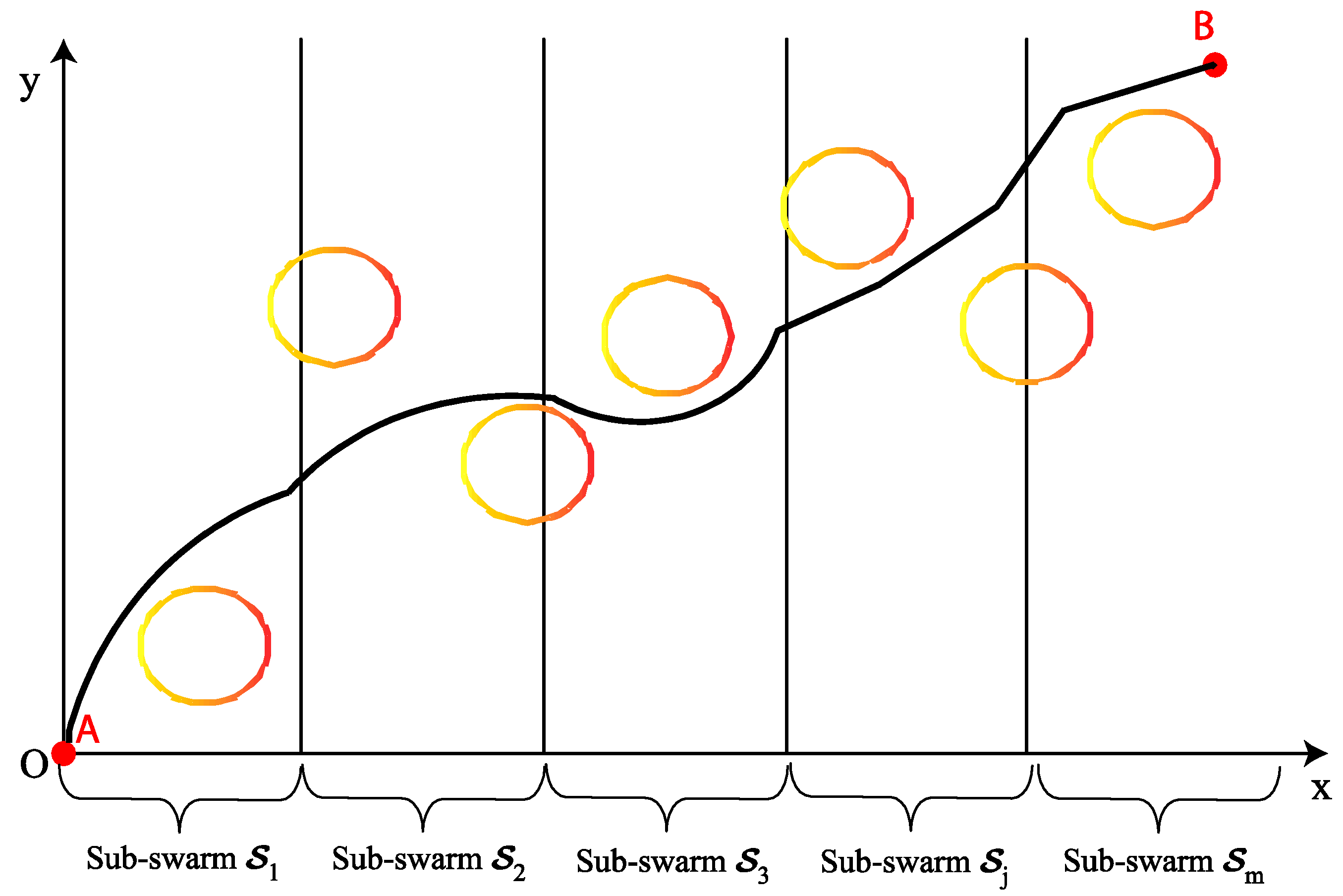
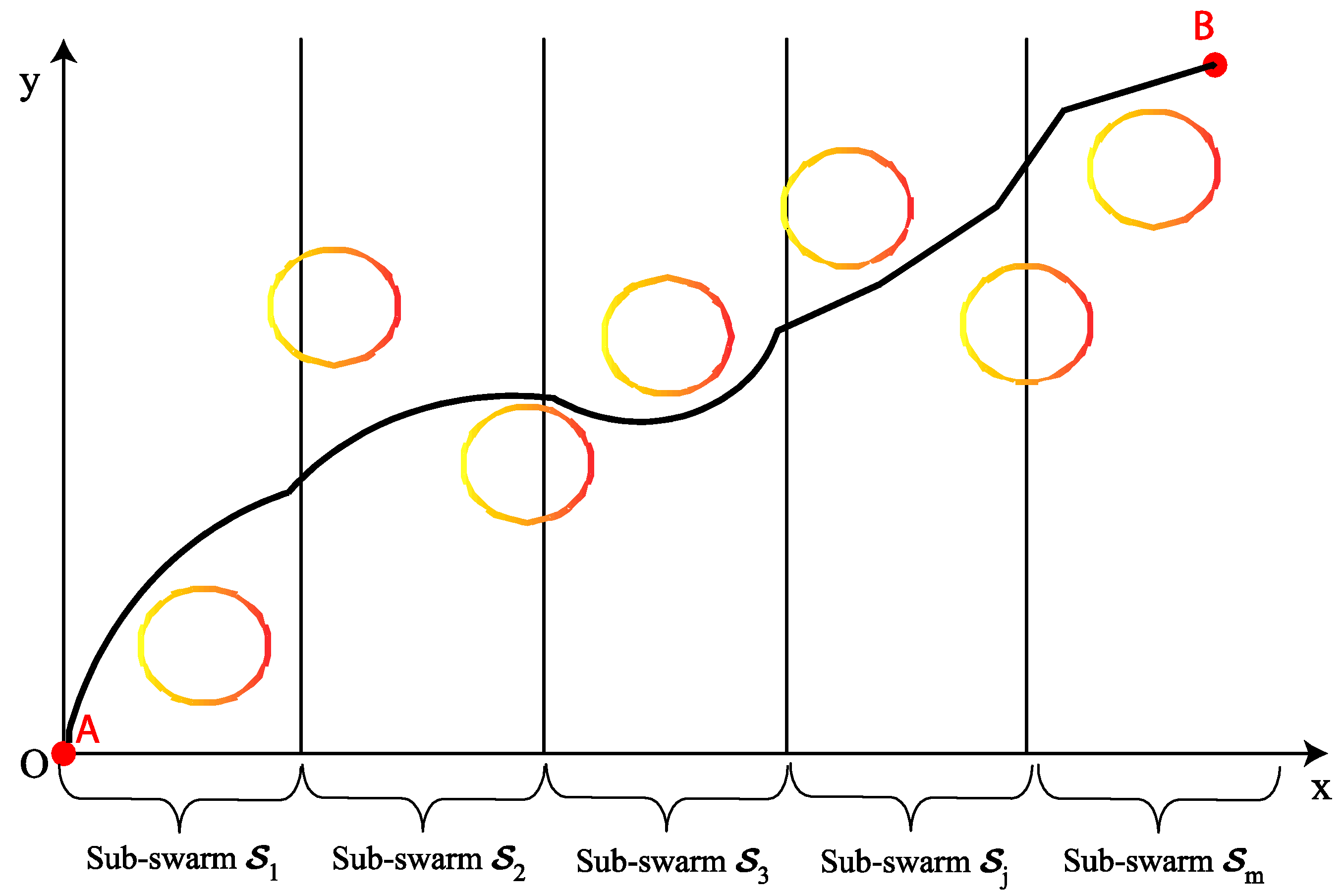
The planning of a flyable and feasible path is a key task in the formalism of drones’ control and navigation. The general definition of such a problem is the generation of a path that guides the drone from a starting point
to a predefined destination
. To ensure this, an environmental modeling is required [
13,
14,
16,
41]. The
x-axis range
is divided into
equal segments delimited by geometric perpendicular hyper-planes passing through the corresponding points
. A waypoint
will be taken at each perpendicular plane and a sequence of these generated points
can be formed. The connection of the different waypoints forming such a flight sequence leads to generating the complete flyable path. In this manner, the path planning problem can be reformulated as an optimization problem that consists in determining the optimal flight waypoints’ sequences minimizing a previously defined performance criterion, i.e., shorter, collision-free and smoother flyable paths [
14,
41]. In this formulation, the decision variables of such a constrained optimization problem are defined as the vector of coordinates of the waypoints
.
For the drones’ navigation, the length of the flyable path is an essential objective. The shorter path can reduce the flight time and extend the battery life which ensures more safety. Therefore, a shorter path remains desirable in all planning problems. To well formulate such a design goal, the corresponding objective function to be minimized is chosen as follows [
14,
41]:
For any path planning problem, the obstacles’ collision avoidance constraint is a key task. Indeed, to ensure that the planned path is safe, the UAV drone must avoid all obstacles. On the other hand, to avoid the risk of being detected by the radars or missiles, a UAV cannot pass through the dangerous regions and/or fly over them [
13,
14,
16,
41]. Thus, such an obstacles’ avoidance constraint is modeled by the following expression:
where
and
are the radius and position of the
ith obstacle, respectively;
means the coordinate of the UAV drone, and
presents the predefined safety distance between the drone and a detected obstacle.
When a UAV performs angle management, it can influence its dynamic characteristics and make its flight operation inefficient. Therefore, the angle between two adjacent segments is introduced to limit the straightness of the path. This performance constraint can be formulated as follows [
42]:
where
is the angle between the two adjacent
qth and (
q+1)th segments connecting the waypoints, and
is the maximum value of the steering angle.
Finally, the formulated constrained optimization problem for the UAVs’ path planning procedure is defined as follows:
where
is the cost function of Equation (1),
and
are the constraints given by Equations (2) and (3), respectively,
is the vector of decision variables, and
is the bounded d-dimensional search space.
To handle the operational constraints (2) and (3) of the optimization problem (4), a static penalty function-based technique is used as follows [
41]:
where
are the scaling penalty coefficients and
means the number of constraints.
5. Conclusions
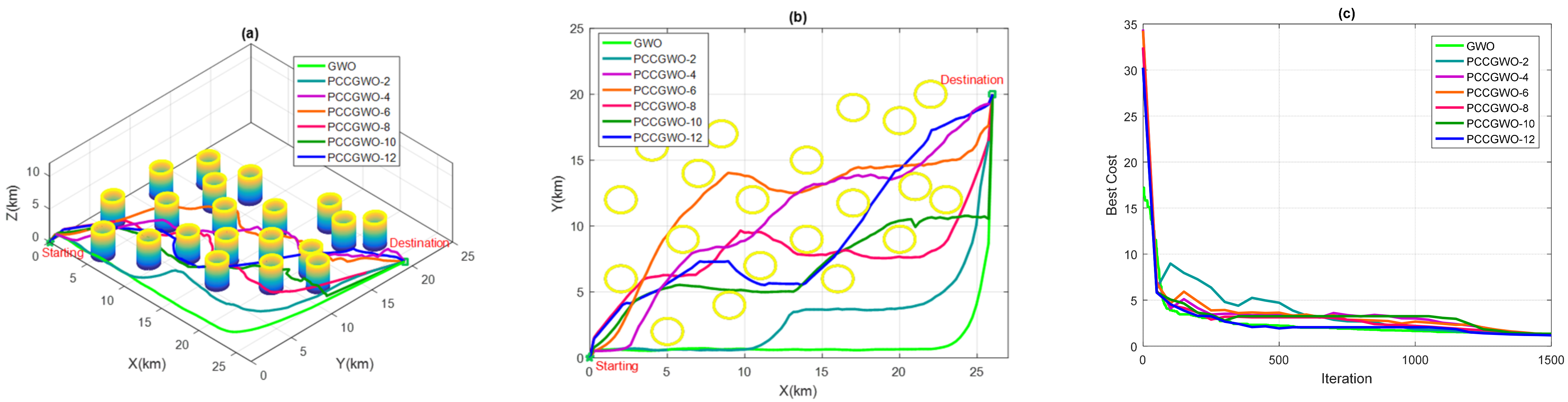
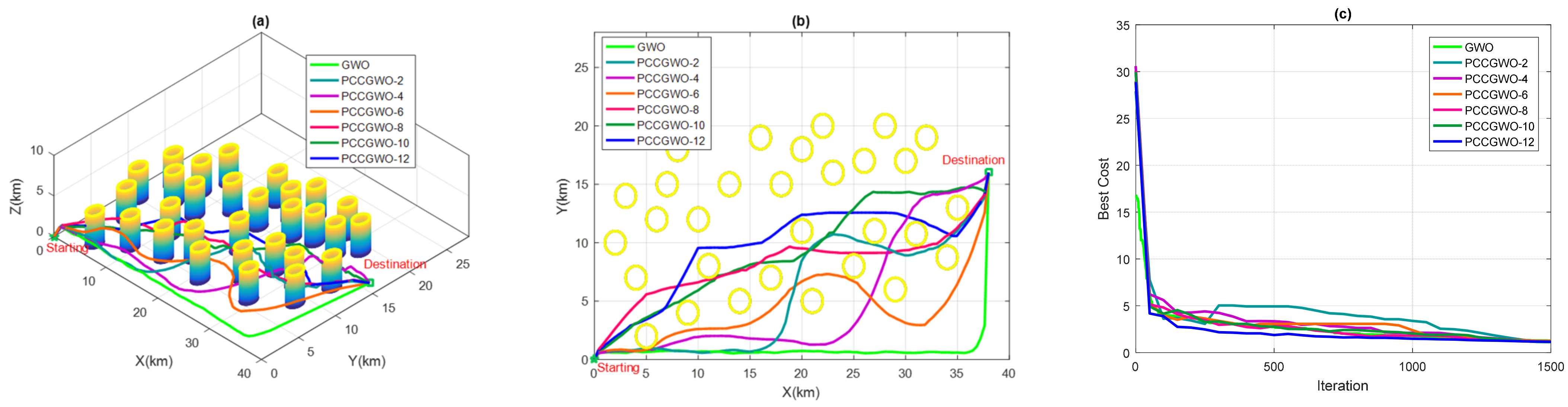
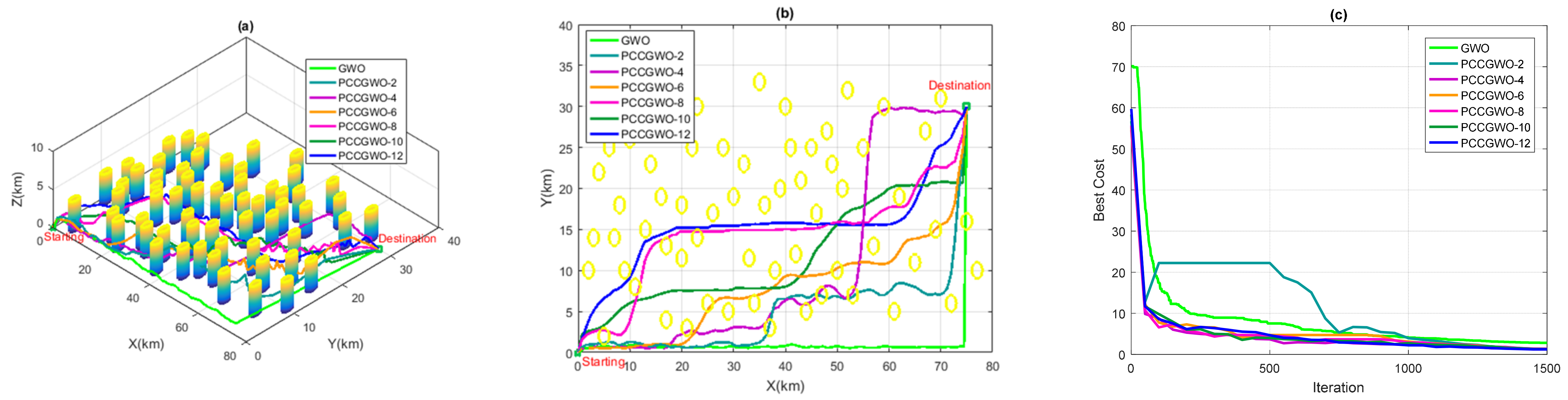
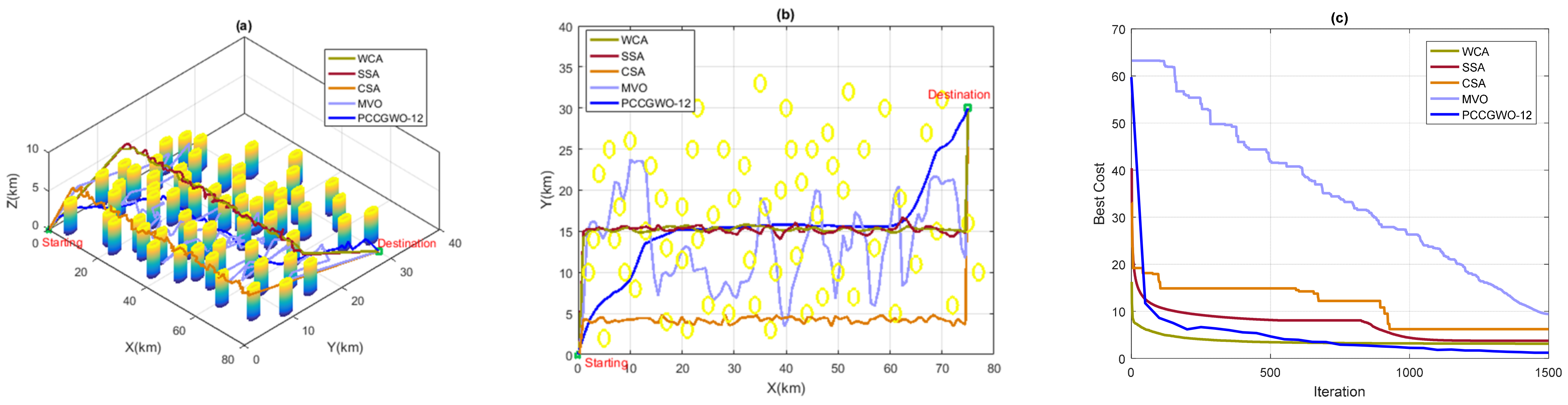
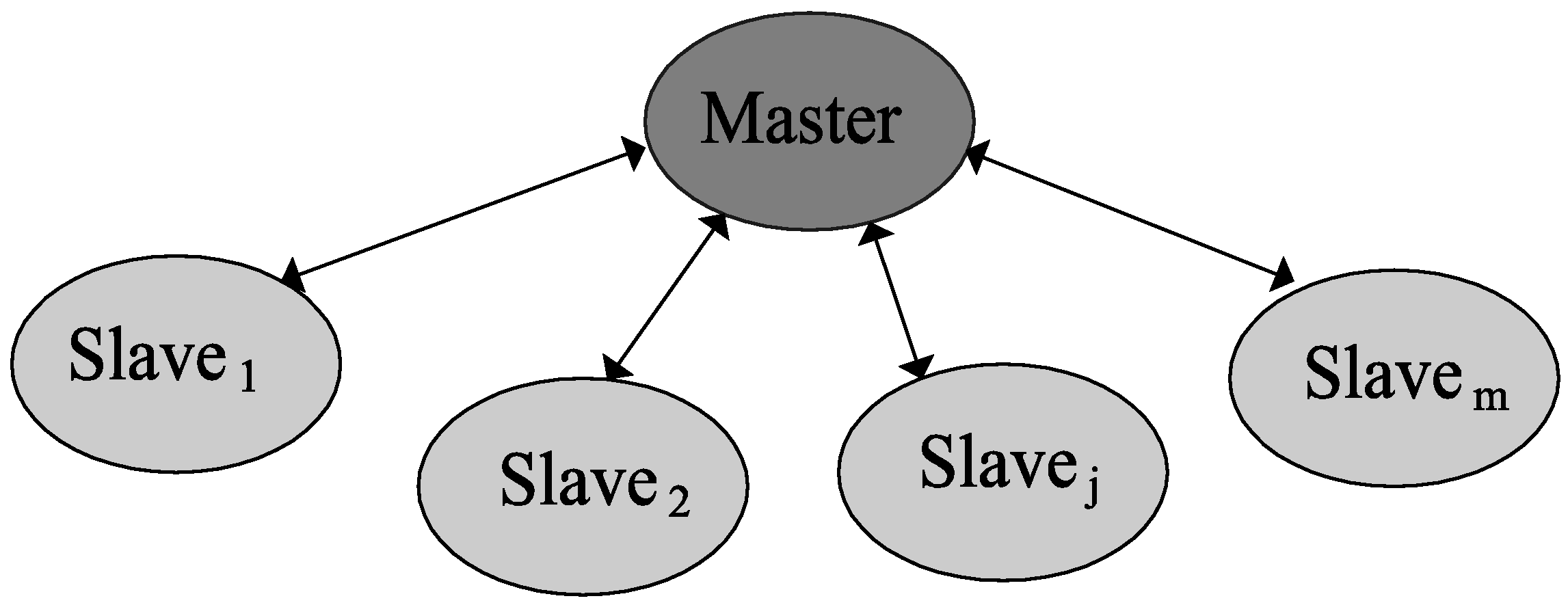
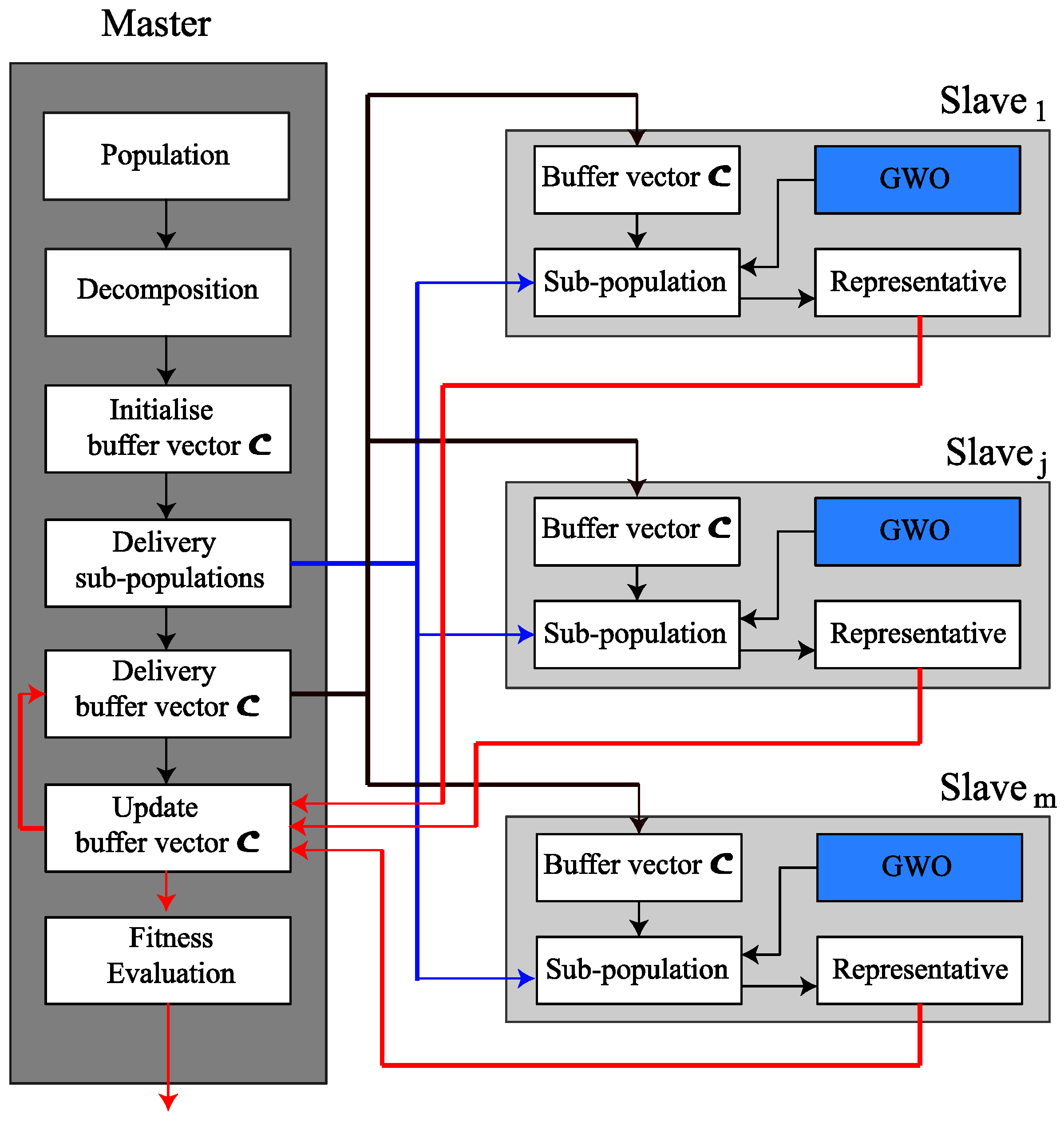
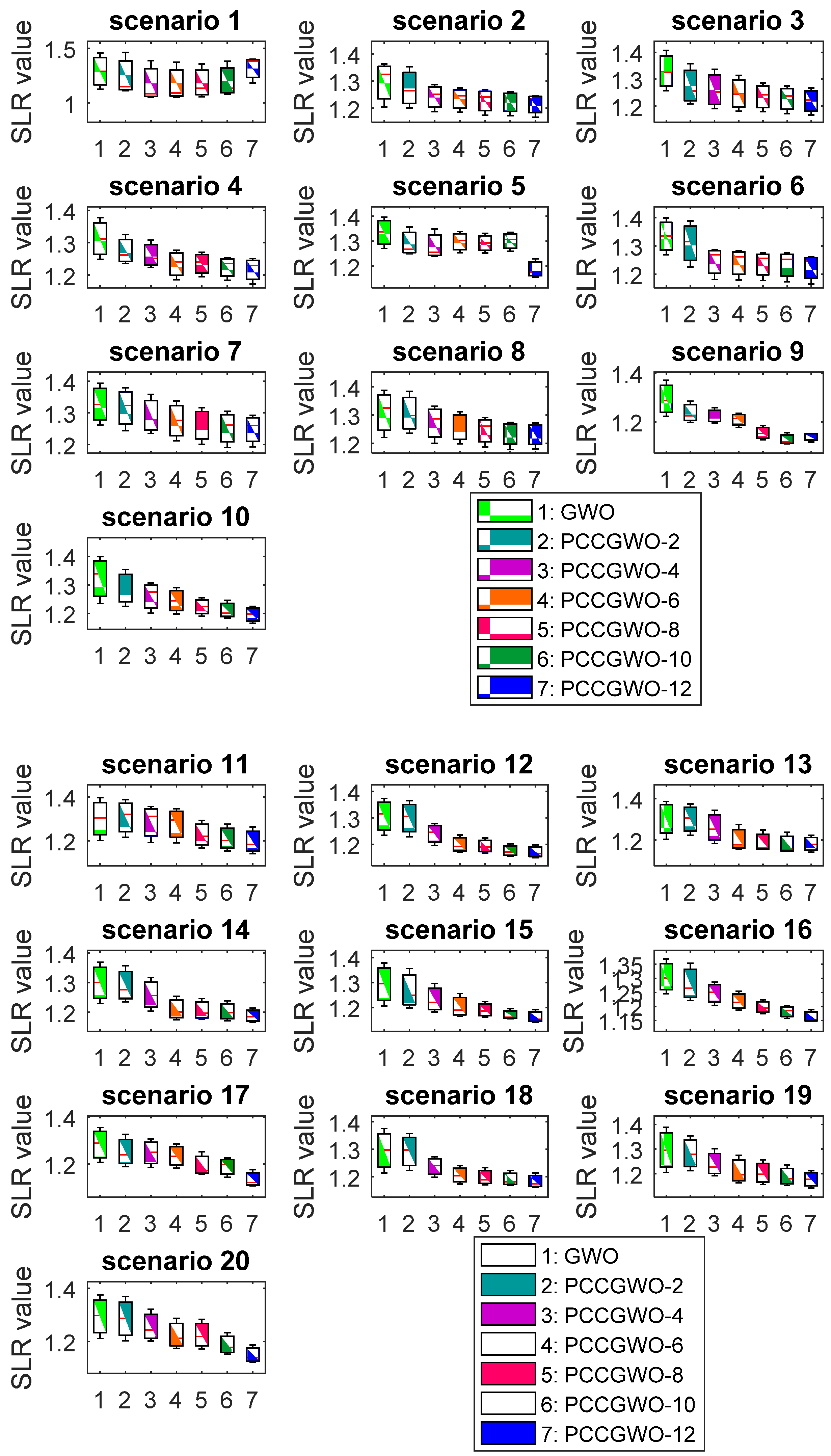
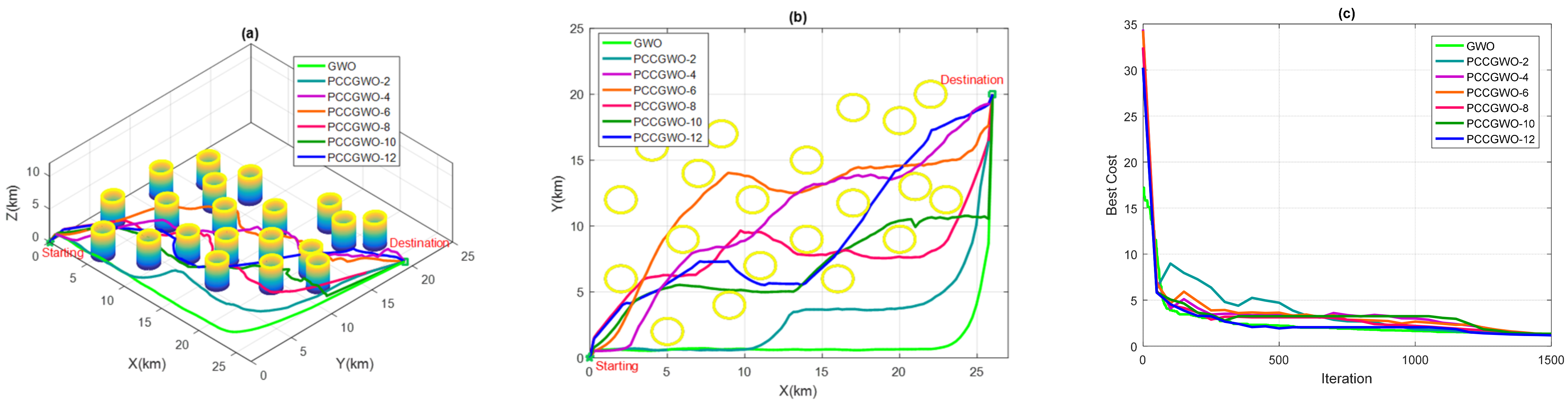
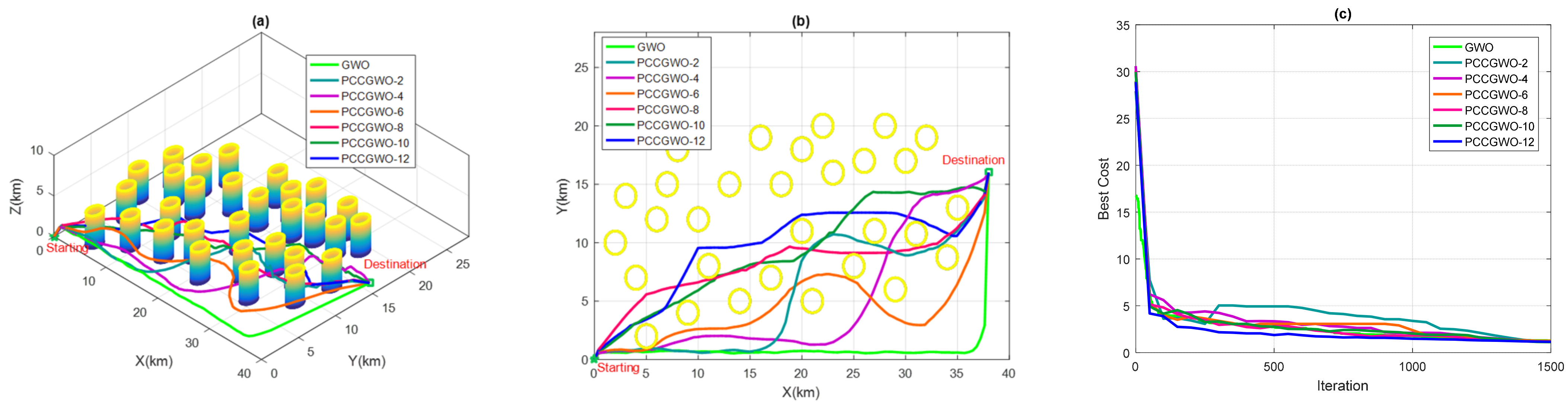
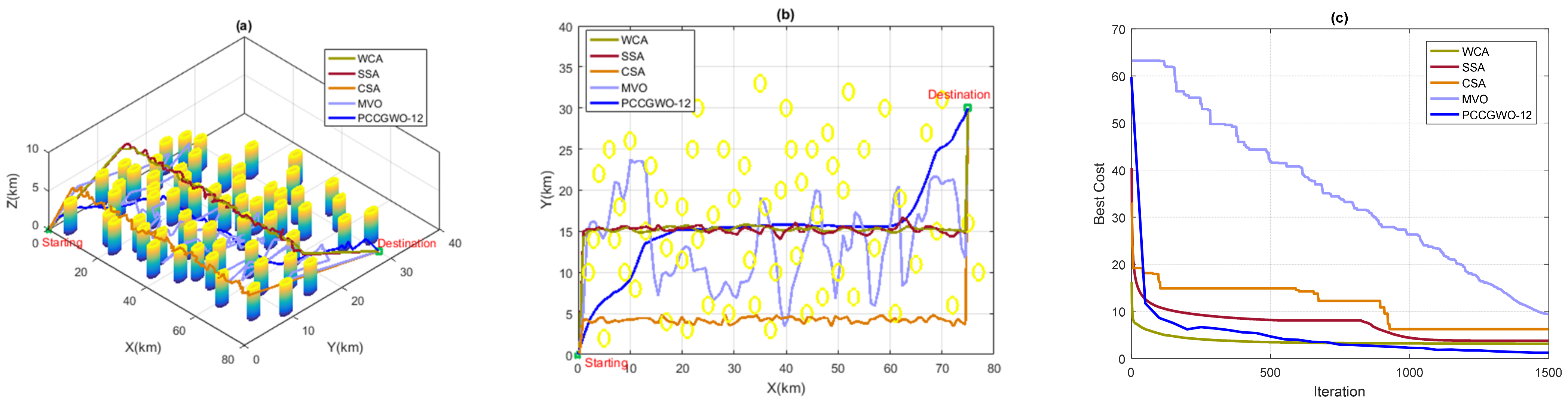
In this paper, a new Parallel Cooperative Coevolutionary variant of the Grey Wolf Optimizer (PCCGWO) based on a parallelization master-slave model has been proposed and successfully applied to solve the UAVs’ path planning problem over large benchmarks and instances of navigation. To overcome the limits and drawbacks of the standard GWO for solving large-scale and complex path planning problems, particularly in terms of dimensionality curse and prohibitive time consuming, two improvement mechanisms in terms of parallelization and cooperative co-evolutionary search are introduced in the proposed PCCGWO algorithm. The UAVs’ path planning problem is formulated as an LSGO problem under operational constraints mainly in terms of obstacles’ collision avoidance and path’s straightness. A cooperative coevolutionary mechanism is applied to make an efficient partition of the original search space into smaller dimensional sub-spaces. The decision variables’ vector is decomposed into several subcomponents with reduced dimensions. An efficient parallelization master-slave technique is then proposed to further reduce the computation time faced with the large-scale and hardness of the planning problem. Six PCCGWO variants with an increased number of slaves, i.e., PCCGWO-2, PCCGWO-4, PCCGWO-6, PCCGWO-8, PCCGWO-10, and PCCGWO-12, are proposed according to the number of the partitioned sub-populations and the available cores of the computer CPU’s processor. Each slave of such a parallel architecture is designed to evolve a sub-swarm that seeks to optimize its component by applying a standard GWO algorithm. The master builds a buffer vector by concatenating the different representatives from slaves, shown as best search agents, and sending it again for a new cycle. The performance analysis of the proposed PCCGWO planners is carried out based on several experiments over different flight instances as well as a comparative study with the standard GWO algorithm, and other recent and extensively used metaheuristics, i.e., Water Cycle Algorithm (WCA), Crow Search Algorithm (CSA), Salp Swarm Algorithm (SSA), and Multi-Verse Optimizer (MVO). The demonstrative results, as well as the nonparametric statistical analyses in the sense of Friedman and post hoc tests, show the effectiveness and superiority of the proposed PCCGWO algorithms with the highest number of slaves, i.e., PCCGWO-10 and PCCGWO-12 variants. The performance metrics in terms of shorter and collision-free planned paths and computational speedup are significantly improved. Obviously, with each increase in the planning problem dimension and number of obstacles, i.e., a more intensive partition of the flight environment, PCCGWO variants with more slaves are needed to best handle the complexity of the resulting optimization problem. As the most suitable drone planners are the ones that have the least parameters’ tuning with an increased computation speediness regarding the software/hardware specifications of the onboard control units, the proposed PCCGWO algorithm can be considered as a promising method for providing shorter and collision-free flight paths in real-world environments.
Future works deal with the implementation of the proposed PCCGWO-based path planning method using the real-world Parrot AR. Drone 2.0 prototype of UAVs and the associated MATLAB/Simulink software. The real-world implementation and prototyping of such a planning algorithm will be investigated regarding all engineering details and managerial implications.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}