
A Cloud Computing-Based Modified Symbiotic Organisms Search Algorithm (AI) for Optimal Task Scheduling

 , , , , ,
, , , , , 
Abstract
:1. Introduction
- The formulation of an optimal solution scheduling optimization technique method for minimizing makespan and degree of imbalance among VMs in the IaaS cloud.
- The design and implementation of the modified SOS algorithm tagged G_SOS for task scheduling in the IaaS cloud.
- The replacement of the traditional SOS algorithm relationship characteristics between two distinct organisms from an arithmetic mean to a geometric mean concept in order to enhance search diversity and global convergence.
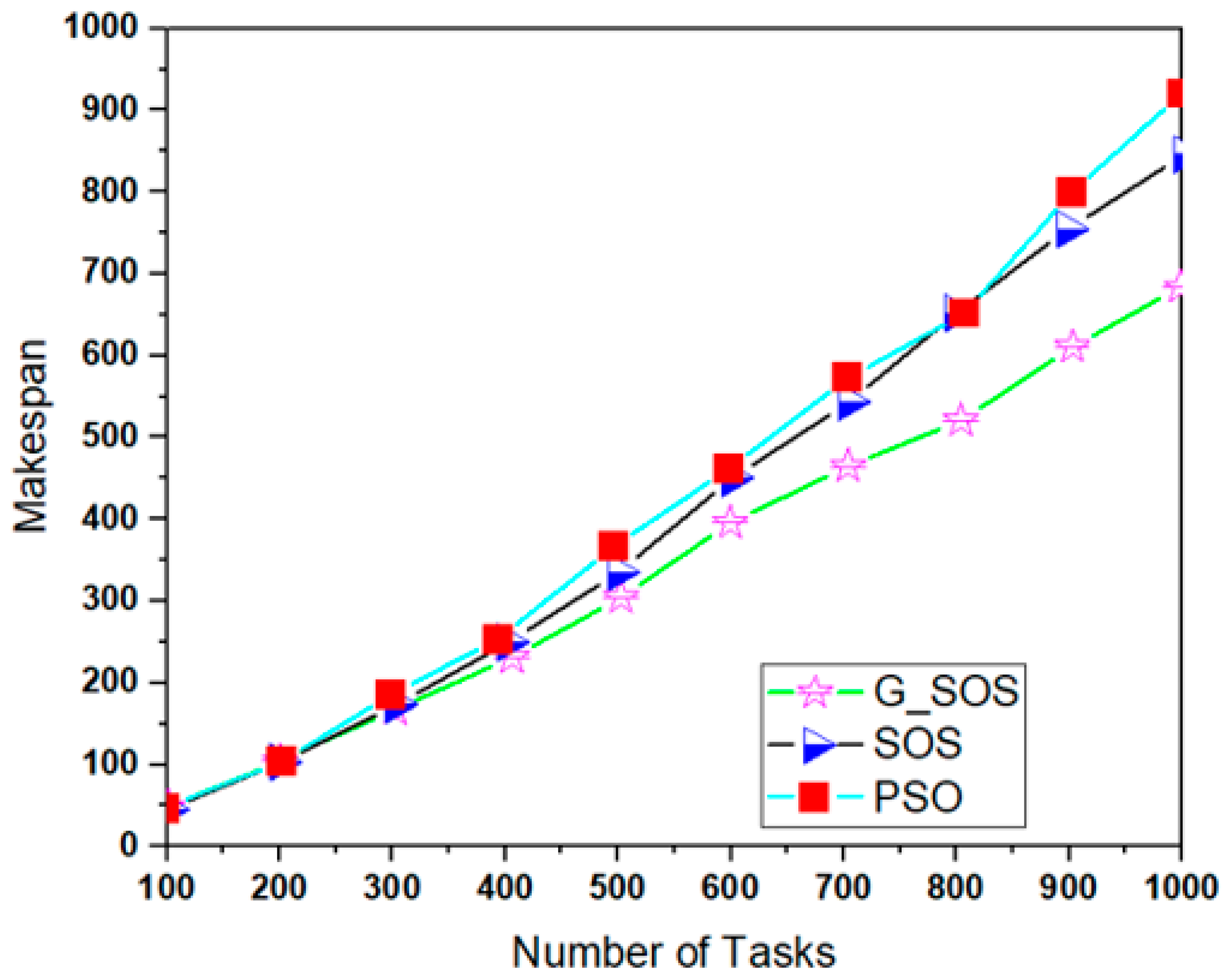
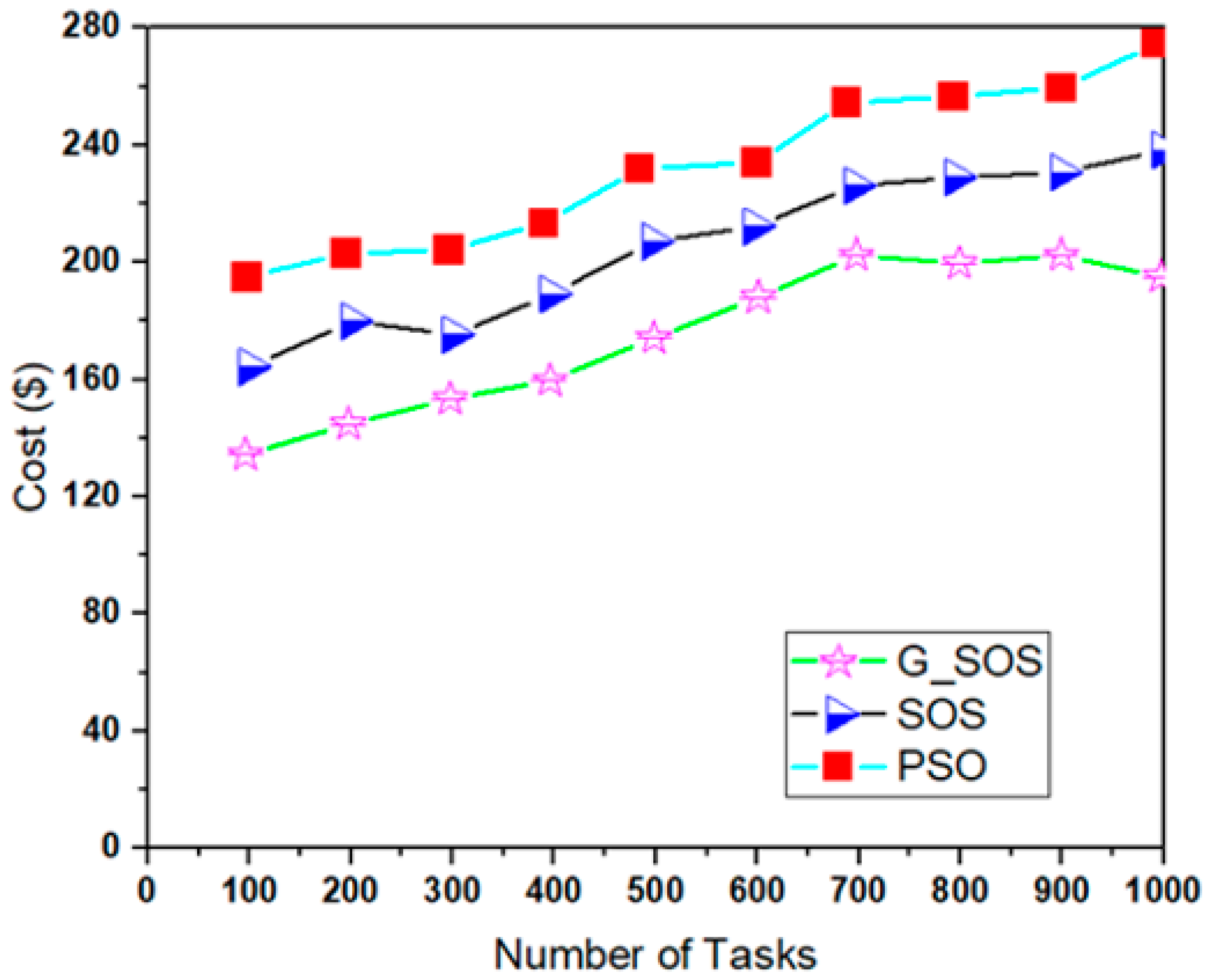
- The evaluation of the technique’s performance indicators, which include makespan, cost, responsiveness, and the degree of imbalance among VMs.
2. Related Works
2.1. Metaheuristic Techniques Used in Cloud Task Scheduling
2.2. Symbiotic Organisms Search Technique (SOS)
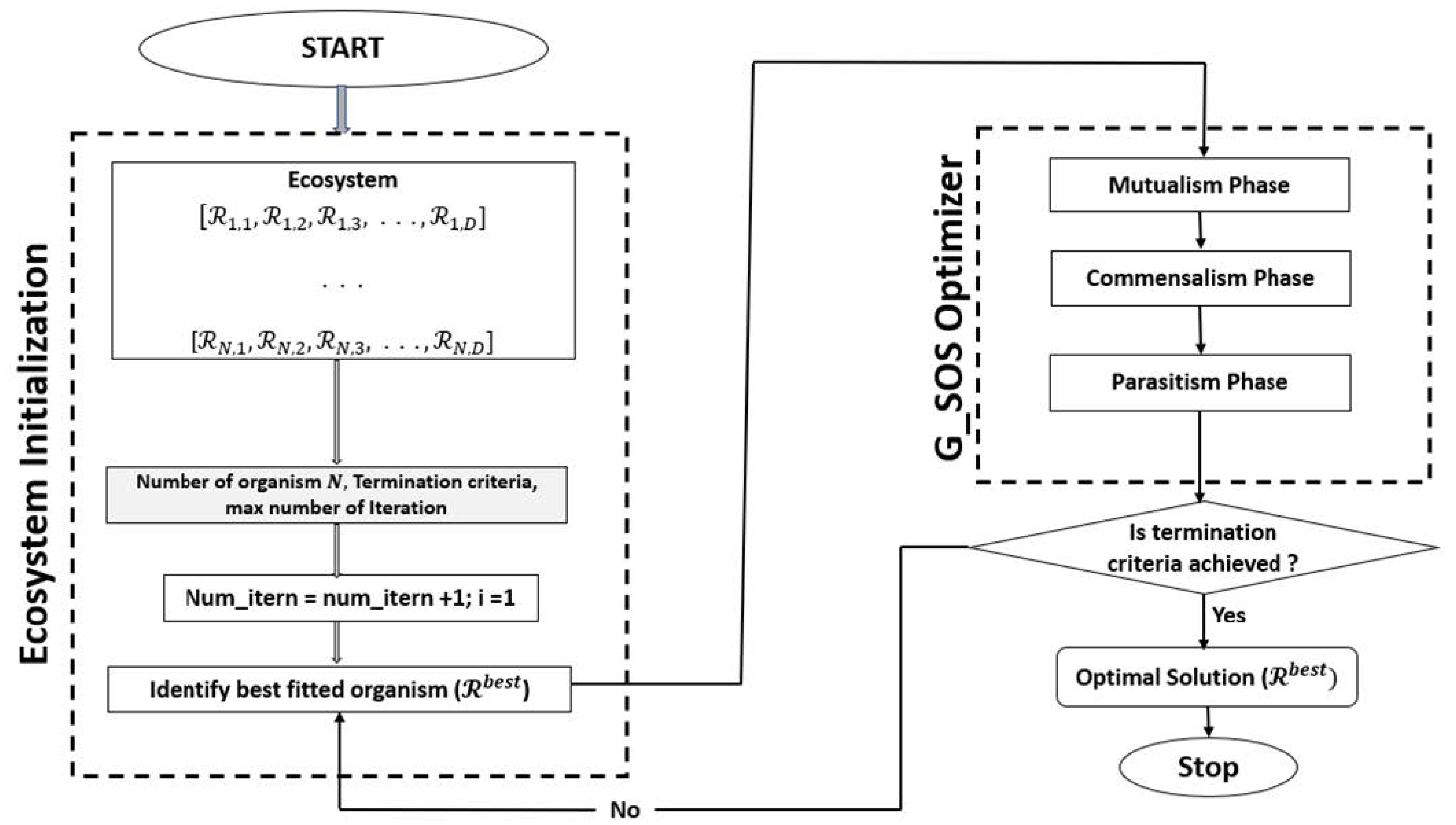
2.3. The Standard Symbiotic Organisms Search (SOS) Algorithm Procedure
- 1st Step:
- Ecosystem creation and initiation
- 2nd Step:
- Choosing the organism with the best-fitting objective function, denoted as
- 3rd Step:
- Mutualism phase
- 4th Step:
- Commensalism phase
- 5th Step:
- Parasitism phase
- 6th Step:
- Termination/Stopping criterion
| Algorithm 1: Traditional Symbiotic Organisms Search Algorithm |
| Create and Initialize the Population of Organisms in the Ecosystem Set the stopping the criteria 0 Do Do Mutualism phase Commensalism phase Parasitism phase While While the stopping criteria is false. |
3. Problem Formulation
Correlation Coefficient
4. Modified Symbiotic Organisms Search Algorithm (G_SOS)
4.1. Mutualism Phase
4.2. Commensalism Phase
4.3. Parasitism Phase
| Algorithm 2: Modified Symbiotic Organism Search algorithm (G_SOS) pseudocode | ||
| Input: Size of population (ecosize), maximum number of iterations (Maxitern) Output: is the optimal solution. The Looping of G_SOS begins: While itern < maxitern | ||
| For i = 1: Population (ecosize) For each species in the ecosystem , i = 1, 2, 3, …, ecosize, search for the organism with the best fitness value | ||
| Mutualism Phase | ||
| Randomly select organisms and | ||
| Calculate the mutual vector () Equation (21) and the benefit factors () using Equations (4) and (5) as described in the work of [36] | ||
| Using Equations (24) and (25) to generate the new organisms and evaluate their fitness values. | ||
| If the new organisms’ fitness values are higher, then replace the predecessors | ||
| Commensalism Phase | ||
| Select organism randomly | ||
| Using Equation (27) to generate a new organism and evaluate its fitness value | ||
| If the new organisms’ fitness values are higher, then replace the predecessor. | ||
| Parasitism Phase | ||
| Select organism randomly | ||
| Generate parasite vector by modifying in Equation (29) Evaluate the fitness value | ||
| If the parasite vector )s’ fitness value is higher, then with | ||
| End for | ||
| Update the best organism of the current population (ecosize) | ||
| End while | ||
5. Simulation and Results
6. Conclusions and Future Works
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| SOS | Symbiotic Organisms Search |
| G_SOS | Geometric-Based Symbiotic Organism Search |
| PSO | Particle Swarm Optimization |
| QoS | Quality of Service |
| SLA | Service Level Agreement |
| VM | Virtual Machine |
| MIPS | Million Instructions per Second |
| CB | Cloud Broker |
| CIS | Cloud Information Service |
| ETC | Expected Time to Compute |
| CPU | Central Processing Unit |
| UCAV | Unscrewed Combat Aerial Vehicle |
| eDSOS | Enhanced Discrete Symbiotic Organisms Search |
| DSOS | Discrete Symbiotic Organisms Search |
| SMSOS | Simplex Method Symbiotic Organisms Search |
| MSOS | Modified Symbiotic Organisms Search |
| I-SOS | Improved Symbiotic Organisms Search |
References
- Usman, M.J.; Ismail, A.S.; Chizari, H.; Abdul-Salaam, G.; Usman, A.M.; Gital, A.Y.; Kaiwartya, O.; Aliyu, A. Energy-efficient Virtual Machine Allocation Technique Using Flower Pollination Algorithm in Cloud Datacenter: A Panacea to Green Computing. J. Bionic Eng. 2019, 16, 354–366. [Google Scholar] [CrossRef]
- Samee, N.M.A.; Ahmed, S.S.; Seoud, R.A. Metaheuristic algorithms for independent task scheduling in symmetric and asymmetric cloud computing environment. J. Comput. Sci. 2019, 15, 594–611. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Z.; Li, F.; Zhu, H.; Xie, H.; Abawajy, J.H.; Chowdhury, M.U. An improved genetic algorithm using greedy strategy toward task scheduling optimization in cloud environments. Neural Comput. Appl. 2020, 32, 1531–1541. [Google Scholar] [CrossRef]
- Seth, S.; Singh, N. Dynamic heterogeneous shortest job first (DHSJF): A task scheduling approach for heterogeneous cloud computing systems. Int. J. Inf. Technol. 2019, 11, 653–657. [Google Scholar] [CrossRef]
- Zhao, Y.; Calheiros, R.; Gange, G.; Bailey, J.; Sinnott, R. SLA-Based Profit Optimization Resource Scheduling for Big Data Analytics-as-a-Service Platforms in Cloud Computing Environments. IEEE Trans. Cloud Comput. 2018, 9, 1236–1253. [Google Scholar] [CrossRef]
- Lavanya, M.; Shanthi, B.; Saravanan, S. Multi objective task scheduling algorithm based on SLA and processing time suitable for cloud environment. Comput. Commun. 2020, 151, 183–195. [Google Scholar] [CrossRef]
- Stephen, A.; Benedict, S.; Kumar, R.P.A. Monitoring IaaS using various cloud monitors. Cluster Comput. 2019, 22, 12459–12471. [Google Scholar] [CrossRef]
- Choe, S.; Li, B.; Ri, I.; Paek, C.; Rim, J.; Yun, S. Improved hybrid symbiotic organism search task-scheduling algorithm for cloud computing. KSII Trans. Internet Inf. Syst. 2018, 12, 3516–3541. [Google Scholar] [CrossRef]
- Nandhini, J.M.; Gnanasekaran, T. Enhanced fault identification and optimal task prediction (EFIOTP) algorithm during multi-resource utilization in cloud-based knowledge and personal computing. Pers. Ubiquitous Comput. 2019, 1, 1–11. [Google Scholar] [CrossRef]
- Sindhu, S.; Mukherjee, S. An evolutionary approach to schedule deadline constrained bag of tasks in a cloud. Int. J. Bio-Inspired Comput. 2018, 11, 229–238. [Google Scholar] [CrossRef]
- Elaziz, M.A.; Xiong, S.; Jayasena, K.P.N.; Li, L. Task scheduling in cloud computing based on hybrid moth search algorithm and differential evolution. Knowl.-Based Syst. 2019, 169, 39–52. [Google Scholar] [CrossRef]
- Shirani, M.R.; Safi-Esfahani, F. Dynamic scheduling of tasks in cloud computing applying dragonfly algorithm, biogeography-based optimization algorithm and Mexican hat wavelet. J. Supercomput. 2021, 77, 1214–1272. [Google Scholar] [CrossRef]
- Zubair, A.A.; Razak, S.B.A.; Ngadi, M.A.B.; Ahmed, A.; Madni, S.H.H. Convergence-based task scheduling techniques in cloud computing: A review. In IRICT; AISC: Chicago, IL, USA, 2020; Volume 1073. [Google Scholar] [CrossRef]
- Madni, S.H.H.; Abd Latiff, M.S.; Abdulhamid, S.M.; Ali, J. Hybrid gradient descent cuckoo search (HGDCS) algorithm for resource scheduling in IaaS cloud computing environment. Cluster Comput. 2019, 22, 301–334. [Google Scholar] [CrossRef]
- Arul Xavier, V.M.; Annadurai, S. Chaotic social spider algorithm for load balance aware task scheduling in cloud computing. Cluster Comput. 2019, 22, 287–297. [Google Scholar] [CrossRef]
- Abdullahi, M.; Ngadi, M.A.; Abdulhamid, S.M. Symbiotic Organism Search optimization based task scheduling in cloud computing environment. Futur. Gener. Comput. Syst. 2016, 56, 640–650. [Google Scholar] [CrossRef]
- Li, J.Q.; Han, Y.Q. A hybrid multi-objective artificial bee colony algorithm for flexible task scheduling problems in cloud computing system. Cluster Comput. 2019, 23, 2483–2499. [Google Scholar] [CrossRef]
- Chen, X.; Long, D. Task scheduling of cloud computing using integrated particle swarm algorithm and ant colony algorithm. Cluster Comput. 2019, 22, 2761–2769. [Google Scholar] [CrossRef]
- Mubeen, A.; Ibrahim, M.; Bibi, N.; Baz, M.; Hamam, H.; Cheikhrouhou, O. Alts: An adaptive Load Balanced Task Scheduling Approach for Cloud Computing. Processes 2021, 9, 1514. [Google Scholar] [CrossRef]
- Gabi, D.; Ismail, A.S.; Zainal, A.; Zalmiyah, Z.; Al-Khasawneh, A. Hybrid Cat Swarm Optimization and Simulated Annealing for dynamic task scheduling on Cloud Computing Environment. J. Inf. Commun. Technol. 2018, 3, 435–467. [Google Scholar]
- Abdullahi, M.; Ngadi, M.A.; Dishing, S.I.; Abdulhamid, S.M.; Ahmad, B.I. An efficient symbiotic organisms search algorithm with chaotic optimization strategy for multi-objective task scheduling problems in cloud computing environment. J. Netw. Comput. Appl. 2019, 133, 60–74. [Google Scholar] [CrossRef]
- Gabi, D.; Ismail, A.S.; Zainal, A.; Zakaria, Z.; Abraham, A.; Dankolo, N.M. Cloud customers service selection scheme based on improved conventional cat swarm optimization. Neural Comput. Appl. 2020, 32, 14817–14838. [Google Scholar] [CrossRef] [Green Version]
- Awad, A.I.; El-Hefnawy, N.A.; Abdel-Kader, H.M. Enhanced Particle Swarm Optimization for Task Scheduling in Cloud Computing Environments. Procedia Comput. Sci. 2015, 65, 920–929. [Google Scholar] [CrossRef] [Green Version]
- Okwu, M.O.; Tartibu, L.K. Particle Swarm Optimisation. In Metaheuristic Optimization: Nature-Inspired Algorithms Swarm and Computational Intelligence, Theory and Applications; Studies in Computational Intelligence; Springer: Cham, Switzerland, 2021; Volume 927, pp. 5–13. [Google Scholar] [CrossRef]
- Cheng, M.Y.; Prayogo, D. Symbiotic Organisms Search: A new metaheuristic optimization algorithm. Comput. Struct. 2014, 139, 98–112. [Google Scholar] [CrossRef]
- Panda, A.; Pani, S. A Symbiotic Organisms Search algorithm with adaptive penalty function to solve multi-objective constrained optimization problems. Appl. Soft. Comput. J. 2016, 46, 344–360. [Google Scholar] [CrossRef]
- Banerjee, S.; Chattopadhyay, S. Optimization of Three-Dimensional Turbo Code using Novel Symbiotic Organism Search Algorithm. In Proceedings of the Conference: 2016 IEEE Annual India Conference (INDICON), Bangalore, India, 16–18 December 2016. [Google Scholar]
- Ezugwu, A.E.S.; Adewumi, A.O. Discrete symbiotic organisms search algorithm for travelling salesman problem. Expert Syst. Appl. 2017, 87, 70–78. [Google Scholar] [CrossRef]
- Abdullahi, M.; Ngadi, M.A. Hybrid symbiotic organisms search optimization algorithm for scheduling of tasks on cloud computing environment. PLoS ONE 2016, 11, e0158229. [Google Scholar] [CrossRef]
- Ezugwu, A.E.; Adeleke, O.J.; Viriri, S. Symbiotic organisms search algorithm for the unrelated parallel machines scheduling with sequence-dependent setup times. PLoS ONE 2018, 13, e0200030. [Google Scholar] [CrossRef]
- Yu, V.F.; Redi, A.A.N.P.; Yang, C.-L.; Ruskartina, E.; Santosa, B. Symbiotic organisms search and two solution representations for solving the capacitated vehicle routing problem. Appl. Soft. Comput. J. 2017, 52, 657–672. [Google Scholar] [CrossRef]
- Truong, K.H.; Nallagownden, P.; Elamvazuthi, I.; Vo, D.N. A Quasi-Oppositional-Chaotic Symbiotic Organisms Search algorithm for optimal allocation of DG in radial distribution networks. Appl. Soft. Comput. J. 2020, 88, 106067. [Google Scholar] [CrossRef]
- Rodrigues, L.R.; Gomes, P.P.; Neto, A.R.R.; Junior, A.H.S. A Modified Symbiotic Organisms Search Algorithm Applied to Flow Shop Scheduling Problems. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation (CEC), Rio de Janeiro, Brazil, 8–13 July 2018; Volume 1, pp. 1–7. [Google Scholar] [CrossRef]
- Yang, X.S. Nature-inspired optimization algorithms: Challenges and open problems. J. Comput. Sci. 2020, 46, 101104. [Google Scholar] [CrossRef] [Green Version]
- Madni, S.H.H.; Latiff, M.S.A.; Ali, J.; Abdulhamid, S.M. Multi-objective-Oriented Cuckoo Search Optimization-Based Resource Scheduling Algorithm for Clouds. Arab. J. Sci. Eng. 2019, 44, 3585–3602. [Google Scholar] [CrossRef]
- Zubair, A.A.; Razak, S.B.A.; Bin Ngadi, M.A.; Ahmed, A. Current Perspective of Symbiotic Organisms Search Technique in Cloud Computing Environment: A Review. Int. J. Adv. Comput. Sci. Appl. 2021, 12, 446–453. [Google Scholar] [CrossRef]
- Ezugwu, A.E.; Prayogo, D. Symbiotic Organisms Search Algorithm: Theory, recent advances and applications. Expert Syst. Appl. 2019, 119, 184–209. [Google Scholar] [CrossRef]
- Nama, S.; Saha, A.K.; Ghosh, S. Improved symbiotic organisms search algorithm for solving unconstrained function optimization. Decis. Sci. Lett. 2016, 5, 361–380. [Google Scholar] [CrossRef]
- Banerjee, S.; Chattopadhyay, S. Power Optimization of Three Dimensional Turbo Code Using a Novel Modified Symbiotic Organism Search (MSOS) Algorithm. Wirel. Pers. Commun. 2017, 92, 941–968. [Google Scholar] [CrossRef]
- Tejani, G.G.; Savsani, V.J.; Patel, V.K. Adaptive symbiotic organisms search (SOS) algorithm for structural design optimization. J. Comput. Des. Eng. 2016, 3, 226–249. [Google Scholar] [CrossRef] [Green Version]
- Miao, F.; Zhou, Y.; Luo, Q. A modified symbiotic organisms search algorithm for unmanned combat aerial vehicle route planning problem. J. Oper. Res. Soc. 2018, 70, 21–52. [Google Scholar] [CrossRef]
- Sa’ad, S.; Muhammed, A.; Abdullahi, M.; Abdullah, A.; Ayob, F.H. An enhanced discrete symbiotic organism search algorithm for optimal task scheduling in the cloud. Algorithms 2021, 14, 200. [Google Scholar] [CrossRef]
- Alboaneen, D.; Tianfield, H.; Zhang, Y.; Pranggono, B. A metaheuristic method for joint task scheduling and virtual machine placement in cloud data centers. Futur. Gener. Comput. Syst. 2021, 115, 201–212. [Google Scholar] [CrossRef]
- Madni, S.H.H.; Abd Latiff, M.S.; Abdullahi, M.; Abdulhamid, S.M.; Usman, M.J. Performance comparison of heuristic algorithms for task scheduling in IaaS cloud computing environment. PLoS ONE 2017, 12, 0176321. [Google Scholar] [CrossRef] [Green Version]
- Gabi, D.; Ismail, A.S.; Zainal, A.; Zakaria, Z. Quality of service task scheduling algorithm for time-cost trade off scheduling problem in cloud computing environment. Int. J. Intell. Syst. Technol. Appl. 2019, 18, 448–469. [Google Scholar] [CrossRef]
- Liu, J.; Pacitti, E.; Valduriez, P.; de Oliveira, D.; Mattoso, M. Multi-objective scheduling of Scientific Workflows in multisite clouds. Futur. Gener. Comput. Syst. 2016, 63, 76–95. [Google Scholar] [CrossRef]
- Liu, Y.; Shu, W.; Zhang, C. A parallel task scheduling optimization algorithm based on clonal operator in green cloud computing. J. Commun. 2016, 11, 185–191. [Google Scholar] [CrossRef] [Green Version]
- Thirumalaiselvan, C.; Venkatachalam, V. A strategic performance of virtual task scheduling in multi cloud environment. Clust. Comput. 2019, 22, 9589–9597. [Google Scholar] [CrossRef]
- Panda, S.K.; Member, I.; Jana, P.K.; Member, I.S. A Multi-Objective Task Scheduling Algorithm for Heterogeneous Multi-Cloud Environment. In Proceedings of the IEEE 2015 International Conference on Electronic Design, Computer Networks & Automated Verification (EDCAV), Shillong, India, 29–30 January 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 82–87. [Google Scholar]
- Srivastava, D.; Kalra, M. Improved Symbiotic Organism Search Based Approach for Scheduling Jobs in Cloud. In Proceedings of the 2019 5th International Conference on Innovation and Industrial Logistics (ICIIL 2019), Paris, France, 21–23 August 2019; pp. 453–461. [Google Scholar]
- Madni, S.H.H.; Abd Latiff, M.S.; Abdulhamid, S.M. Optimal Resource Scheduling for IaaS Cloud Computing using Cuckoo. Sains Humanika 2017, 9, 71–76. [Google Scholar] [CrossRef]
- Do, D.T.T.; Lee, D.; Lee, J. Material optimization of functionally graded plates using deep neural network and modified symbiotic organisms search for eigenvalue problems. Compos. Part B Eng. 2019, 159, 300–326. [Google Scholar] [CrossRef]
- Do, D.T.T.; Nguyen-Xuan, H.; Lee, J. Material optimization of tri-directional functionally graded plates by using deep neural network and isogeometric multimesh design approach. Appl. Math. Model. 2020, 87, 501–533. [Google Scholar] [CrossRef]
- Calheiros, R.N.; Ranjan, R.; Beloglazov, A.; De Rose, C.A.F.; Buyya, R. CloudSim: A toolkit for modeling and simulation of cloud computing environments and evaluation of resource provisioning algorithms. Softw. Pract. Exp. 2011, 41, 23–50. [Google Scholar] [CrossRef]
- Lahoura, V.; Singh, H.; Aggarwal, A.; Sharma, B.; Mohammed, M.A.; Damaševičius, R.; Kadry, S.; Cengiz, K. Cloud Computing-Based Framework for Breast Cancer Diagnosis Using Extreme Learning Machine. Diagnostics 2021, 11, 2–19. [Google Scholar] [CrossRef]
- Garg, H.; Gupta, N.; Agrawal, R.; Shivani, S.; Sharma, B. A real time cloud-based framework for glaucoma screening using EfficientNet. Multimed. Tools Appl. 2022, 1–22. [Google Scholar] [CrossRef]
- Chand, D.T.; Sharma, B. HRCCTP: A Hybrid Reliable and Congestion Control Transport Protocol for Wireless Sensor Networks. In Proceedings of the 2015 IEEE SENSORS, Busan, Korea, 1–4 November 2015. [Google Scholar]
- Bajaj, K.; Sharma, B.; Singh, R. Implementation analysis of IoT-based offloading frameworks on cloud/edge computing for sensor generated big data. Complex Intell. Syst. 2021, 1–18. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| T VM | - | - | |||
|---|---|---|---|---|---|
| - | - | ||||
| - | - | - | |||
| - | - | - | - | - | - |
| - | - | - | - | - | - |
| - | - | - | - | - | - |
| - | - |
| Algorithm | Parameter | Value |
|---|---|---|
| SOS | Ecosize | 100 |
| Number of iterations | 1000 | |
| PSO | Particle size | 100 |
| Static Inertial weight | 0.9 | |
| Variable Inertia weight, ⱳ | 0.9–0.4 | |
| Coefficients C_1 and C_2 | 2 | |
| Number of iterations | 1000 |
| Cloud Entity | Parameter | Value |
|---|---|---|
| Datacenter | Number | 1 |
| Host | Number | 2 |
| Processing speed | 1,000,000 MIPS | |
| RAM | 20 GB | |
| Storage | 1 Terabyte (TB) | |
| Bandwidth | 10 GB/s | |
| Operating system | Linux | |
| Architecture | x86 | |
| VMM | Xen | |
| VM | Number | 20 |
| Bandwidth | 1 GB/s | |
| Memory | 0.5 GB | |
| Image size | 10 GB | |
| Processing speed (MIPS) | 100–5000 | |
| Scheduler | Time-shared | |
| Task | Number of tasks | 100–1000 |
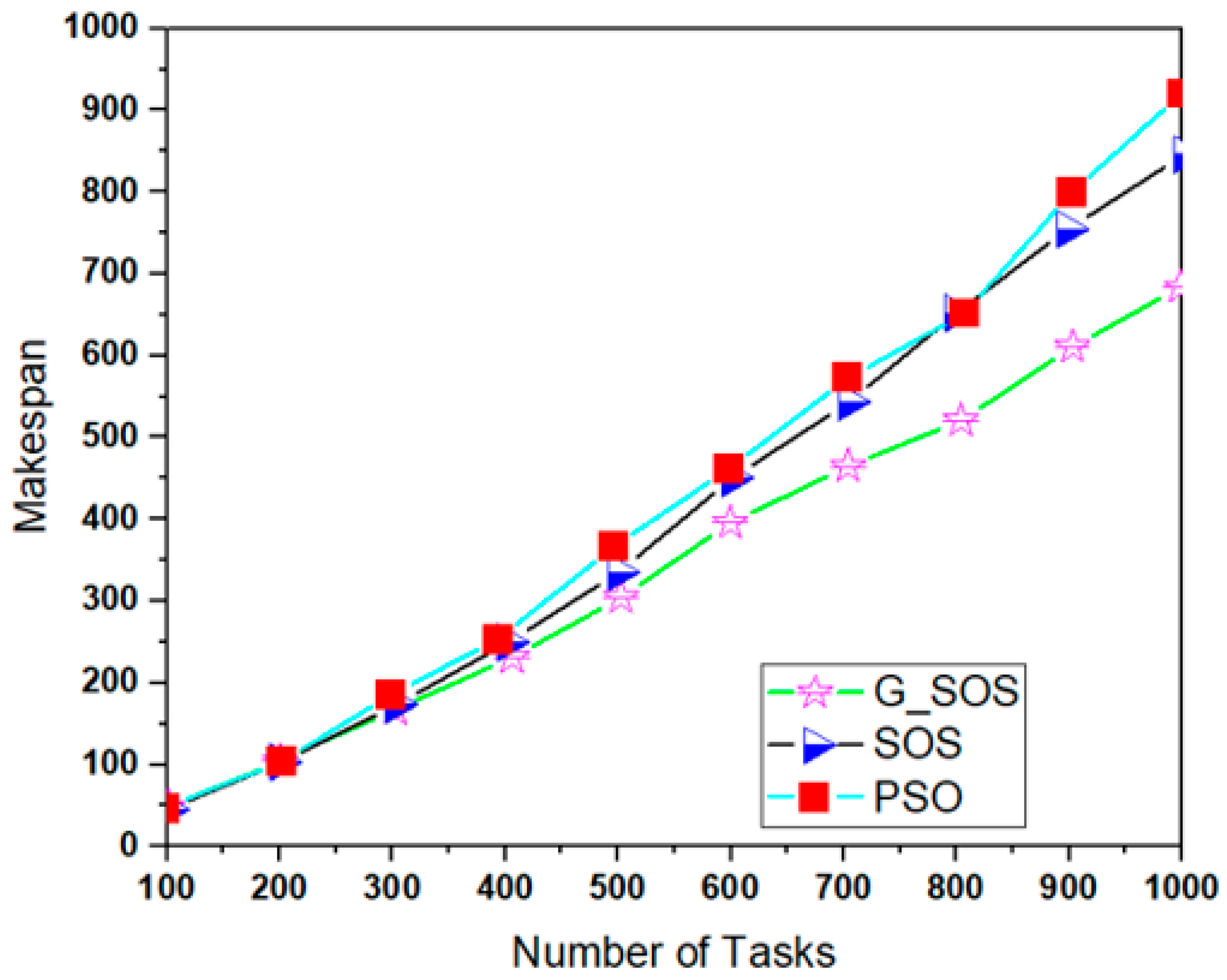
| Number of Tasks | SOS | G_SOS | Improvement Rate (%) |
|---|---|---|---|
| 100 | 45.2864 | 44.8002 | 1.07 |
| 200 | 102.8854 | 102.2623 | 0.61 |
| 300 | 173.3352 | 167.5982 | 3.31 |
| 400 | 249.2924 | 230.9342 | 7.36 |
| 500 | 335.1172 | 304.1376 | 9.24 |
| 600 | 450.3151 | 395.4699 | 12.18 |
| 700 | 543.2537 | 464.5428 | 14.49 |
| 800 | 651.5674 | 520.7649 | 20.08 |
| 900 | 754.3735 | 610.7203 | 19.04 |
| 1000 | 845.7058 | 683.9238 | 19.13 |
| Number of Tasks | PSO-SA | G_SOS | Improvement Rate (%) |
|---|---|---|---|
| 100 | 46.6633 | 44.8002 | 3.99 |
| 200 | 104.2623 | 102.2623 | 1.92 |
| 300 | 185.9565 | 167.5982 | 9.87 |
| 400 | 253.4230 | 230.9342 | 8.87 |
| 500 | 366.0967 | 304.1376 | 16.92 |
| 600 | 461.7890 | 395.4699 | 14.36 |
| 700 | 572.8564 | 464.5428 | 18.91 |
| 800 | 651.5674 | 520.7649 | 20.08 |
| 900 | 799.3512 | 610.7203 | 23.60 |
| 1000 | 920.2861 | 683.9238 | 25.68 |
| Number of Tasks | SOS | G_SOS | Improvement Rate (%) |
|---|---|---|---|
| 100 | 164.3427 | 134.3689 | 18.24 |
| 200 | 179.9629 | 144.7120 | 19.59 |
| 300 | 175.3191 | 153.3664 | 12.52 |
| 400 | 189.1450 | 159.6989 | 15.57 |
| 500 | 207.0871 | 174.1581 | 15.90 |
| 600 | 212.2586 | 187.9840 | 11.44 |
| 700 | 226.0846 | 202.4432 | 10.46 |
| 800 | 229.0397 | 199.5936 | 12.86 |
| 900 | 230.7284 | 202.4432 | 12.26 |
| 1000 | 238.2218 | 194.9498 | 18.16 |
| Number of Tasks | PSO-SA | G_SOS | Improvement Rate (%) |
|---|---|---|---|
| 100 | 194.9498 | 134.3689 | 31.08 |
| 200 | 203.0765 | 144.7120 | 28.74 |
| 300 | 204.2374 | 153.3664 | 24.91 |
| 400 | 213.4196 | 159.6989 | 25.17 |
| 500 | 231.8893 | 174.1581 | 24.90 |
| 600 | 234.2113 | 187.9840 | 19.74 |
| 700 | 254.4752 | 202.4432 | 20.45 |
| 800 | 256.6916 | 199.5936 | 22.24 |
| 900 | 259.6468 | 202.4432 | 22.03 |
| 1000 | 274.6337 | 194.9498 | 29.01 |
| Number of Tasks | SOS | G_SOS | Improvement Rate (%) |
|---|---|---|---|
| 100 | 8.9932 | 7.6580 | 14.85 |
| 200 | 16.3056 | 11.7867 | 27.71 |
| 300 | 21.3792 | 19.5100 | 8.74 |
| 400 | 33.8679 | 22.3035 | 34.15 |
| 500 | 40.7900 | 32.1424 | 21.20 |
| 600 | 46.3771 | 32.8203 | 29.23 |
| 700 | 53.4431 | 30.9511 | 42.09 |
| 800 | 56.6269 | 40.2560 | 28.91 |
| 900 | 64.8842 | 49.0474 | 24.41 |
| 1000 | 69.2799 | 47.9793 | 30.75 |
| Number of Tasks | PSO-SA | G_SOS | Improvement Rate (%) |
|---|---|---|---|
| 100 | 8.3359 | 7.65801 | 8.13 |
| 200 | 16.5726 | 11.78667 | 28.88 |
| 300 | 24.1727 | 19.50995 | 19.29 |
| 400 | 29.8830 | 22.30347 | 25.36 |
| 500 | 35.4700 | 32.14243 | 9.38 |
| 600 | 47.3220 | 32.82027 | 30.64 |
| 700 | 52.7652 | 30.95108 | 41.34 |
| 800 | 59.1534 | 40.25598 | 31.95 |
| 900 | 67.8010 | 49.04737 | 27.66 |
| 1000 | 73.2648 | 47.97925 | 34.51 |
| Number of Tasks | SOS | G_SOS | Improvement Rate (%) |
|---|---|---|---|
| 100 | 1.5908 | 1.5709 | 1.25 |
| 200 | 1.5496 | 1.5225 | 1.75 |
| 300 | 1.6315 | 1.6049 | 1.63 |
| 400 | 1.7180 | 1.6833 | 2.02 |
| 500 | 1.8529 | 1.6397 | 11.51 |
| 600 | 1.9312 | 1.7309 | 10.37 |
| 700 | 2.0265 | 1.8399 | 9.21 |
| 800 | 1.9612 | 1.7922 | 8.61 |
| 900 | 2.1308 | 1.8529 | 13.04 |
| 1000 | 2.1743 | 1.9482 | 10.40 |
| Number of Tasks | PSO-SA | G_SOS | Improvement Rate (%) |
|---|---|---|---|
| 100 | 1.6267 | 1.5709 | 3.43 |
| 200 | 1.5532 | 1.5225 | 1.97 |
| 300 | 1.6138 | 1.6049 | 0.55 |
| 400 | 1.7228 | 1.6833 | 2.29 |
| 500 | 1.8917 | 1.6397 | 13.32 |
| 600 | 1.9741 | 1.7309 | 12.32 |
| 700 | 2.0265 | 1.8399 | 9.21 |
| 800 | 2.1178 | 1.7922 | 15.37 |
| 900 | 2.2002 | 1.8529 | 15.79 |
| 1000 | 2.2956 | 1.9482 | 15.13 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zubair, A.A.; Razak, S.A.; Ngadi, M.A.; Al-Dhaqm, A.; Yafooz, W.M.S.; Emara, A.-H.M.; Saad, A.; Al-Aqrabi, H. A Cloud Computing-Based Modified Symbiotic Organisms Search Algorithm (AI) for Optimal Task Scheduling. Sensors 2022, 22, 1674. https://doi.org/10.3390/s22041674
Zubair AA, Razak SA, Ngadi MA, Al-Dhaqm A, Yafooz WMS, Emara A-HM, Saad A, Al-Aqrabi H. A Cloud Computing-Based Modified Symbiotic Organisms Search Algorithm (AI) for Optimal Task Scheduling. Sensors. 2022; 22(4):1674. https://doi.org/10.3390/s22041674
Chicago/Turabian StyleZubair, Ajoze Abdulraheem, Shukor Abd Razak, Md. Asri Ngadi, Arafat Al-Dhaqm, Wael M. S. Yafooz, Abdel-Hamid M. Emara, Aldosary Saad, and Hussain Al-Aqrabi. 2022. "A Cloud Computing-Based Modified Symbiotic Organisms Search Algorithm (AI) for Optimal Task Scheduling" Sensors 22, no. 4: 1674. https://doi.org/10.3390/s22041674
APA StyleZubair, A. A., Razak, S. A., Ngadi, M. A., Al-Dhaqm, A., Yafooz, W. M. S., Emara, A.-H. M., Saad, A., & Al-Aqrabi, H. (2022). A Cloud Computing-Based Modified Symbiotic Organisms Search Algorithm (AI) for Optimal Task Scheduling. Sensors, 22(4), 1674. https://doi.org/10.3390/s22041674