
CFD-Based Flow Channel Optimization and Performance Prediction for a Conical Axial Maglev Blood Pump



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Description of the Conical Axial Maglev Blood Pump
2.2. Experimental Setting
2.3. Preparation of the 3D Model
2.4. Computational Domain
2.5. Mesh Generation
2.6. Material Properties
2.7. Boundary and Initial Conditions
2.8. Solver Settings and Turbulence Modeling
2.9. Mesh Independence Test
3. Flow Channel Optimization and Analysis
3.1. Optimization of Front and Rear Tips of Rotor Hubs
3.2. Integrated Rotor Design
3.3. Conical Optimization of the Impeller Hub
4. Hemolysis Performance Prediction
5. Extracorporeal Circulation Experiment
6. Conclusions
- Based on an optimization analysis of the traditional axial blood pump, the hub tip obtained by the streamlined design method was reasonable, and the speed field in the hub area was uniform, with only a small degree of vortex and backflow. By comparison, the manually adjusted structure had a relatively concentrated vortex and backflow phenomenon. The integrated design of the rotor eliminated the blood stagnation area and reduced the bypass phenomenon, thereby improving the hemolysis performance of the blood pump. Due to the conical design of the impeller hub, the outlet pressure of the blood pump increased greatly, indicating good effectiveness of the optimal design.
- Based on the hemolysis prediction analysis of the blood pump, the average hemolysis value of the blood pump was E = 0.00232, which was much smaller than that of traditional axial blood pumps. The high shear force had a large influence on the hemolysis prediction value, indicating that in the design process of axial blood pumps, it is necessary to avoid high shear stress areas. The hemolysis prediction value of the blood pump was negatively correlated with the clearance of the blood pump. Thus, under the premise of meeting working conditions, the clearance should be as large as possible.
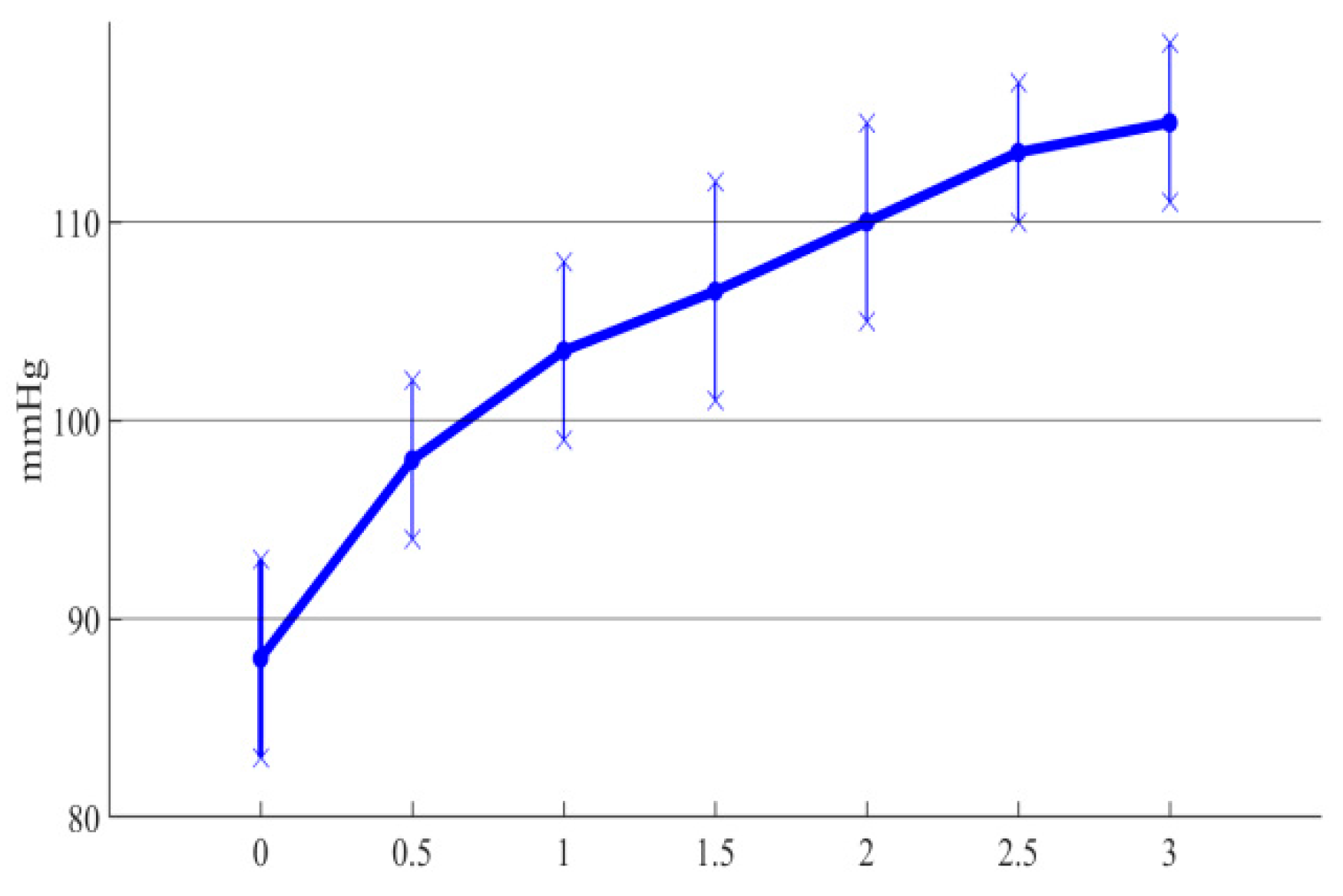
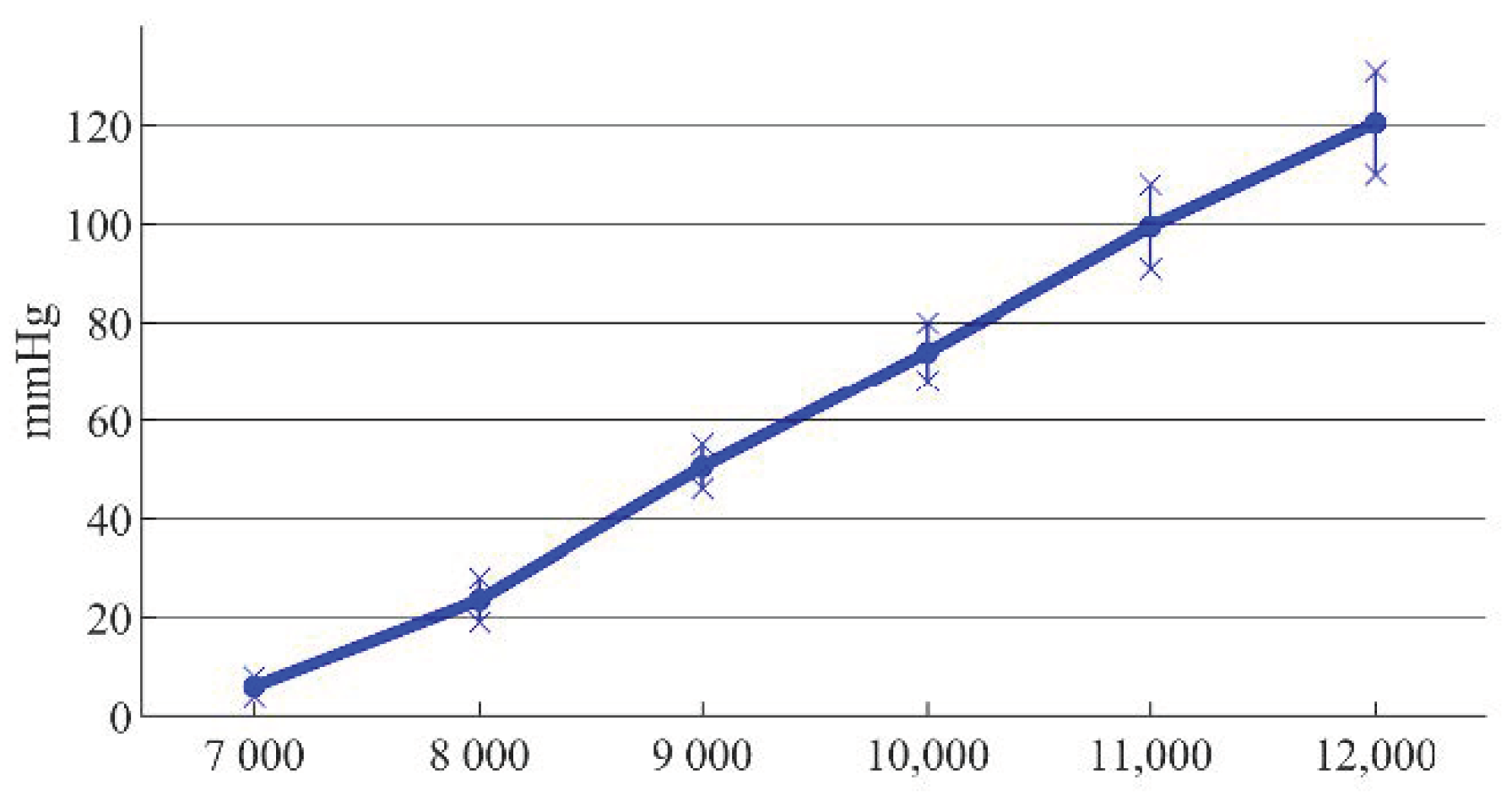
- An extracorporeal circulation platform was built to test the performance of the blood pump. As the taper angle of the impeller hub increased, the outlet pressure also increased, which verified the effectiveness of the conical design in improving the hydraulic performance of the blood pump. There were certain differences between the experimental results and the simulation data; nevertheless, the overall trend was consistent, which verified the correctness of the simulation results.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Braunwald, E. The war against heart failure: The Lancet lecture. Lancet 2015, 385, 812–824. [Google Scholar] [CrossRef]
- Yang, W.; Wu, H.; Hu, Y. Structural design and numerical simulation of an implantable axial blood pump. Open Access J. Biomed. Sci. 2019, 1, 83–92. [Google Scholar]
- Hallas, C.; Banner, N.R.; Wray, J. A Qualitative Study of the Psychological Experience of Patients During and After Mechanical Cardiac Support. J. Cardiovasc. Nurs. 2009, 24, 31–39. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Antaki, J.F.; Burgreen, G.W.; Wu, Z.J.; Borzelleca, D.; Kameneva, M.V.; Holmes, J.A.; Litwak, P.; Litwak, K.; Watach, M.; Paden, B.E.; et al. Development progress of the university of pittsburgh streamliner: A mixed flow blood pump with magnetic bearings. ASAIO J. 2000, 46, 194. [Google Scholar] [CrossRef]
- Johnson, C.A.; Wearden, P.D.; Kocyildirim, E.; Maul, T.M.; Woolley, J.R.; Ye, S.-H.; Strickler, E.M.; Borovetz, H.S.; Wagner, W.R. Platelet Activation in Ovines Undergoing Sham Surgery or Implant of the Second Generation Pedia, Flow Pediatric Ventricular Assist Device. Artif. Organs 2011, 35, 602–613. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yu, Z.; Tan, J.; Wang, S. Multi-parameter analysis of the effects on hydraulic performance and hemolysis of blood pump splitter blades. Adv. Mech. Eng. 2020, 12, 1–12. [Google Scholar] [CrossRef]
- Yang, W.; Wu, H.; Hu, Y. Axial Magnetic Suspension Blood Pump Design Theory and Method; Wuhan University of Technology Press: Wuhan, China, 2021; ISBN 978-7-5629-6400-1. [Google Scholar]
- Liu, G.-M.; Jin, D.-H.; Chen, H.-B.; Hou, J.-F.; Zhang, Y.; Sun, H.-S.; Zhou, J.-Y.; Hu, S.-S.; Gui, X.-M. Numerical investigation of the influence of a bearing/shaft structure in an axial blood pump on the potential for device thrombosis. Int. J. Artif. Organs 2019, 42, 182–189. [Google Scholar] [CrossRef] [PubMed]
- Wu, H.; Gong, G.; Wang, Z.; Hu, Y.; Song, C. Structural Design and Numerical Simulation of The Diffuser for Maglev Axial Blood Pump. J. Mech. Med. Biol. 2014, 14, 1450045. [Google Scholar] [CrossRef]
- Yano, T.; Sekine, K.; Mitoh, A.; Mitamura, Y.; Okamoto, E.; Kim, D.-W.; Nishimura, I.; Murabayashi, S.; Yozu, R. An Estimation Method of Hemolysis within an Axial Flow Blood Pump by Computational Fluid Dynamics Analysis. Artif. Organs 2003, 27, 920–925. [Google Scholar] [CrossRef] [PubMed]
- Taskin, M.E.; Fraser, K.H.; Zhang, T.; Wu, C.; Griffith, B.P.; Wu, Z.J. Evaluation of Eulerian and Lagrangian Models for Hemolysis Estimation. ASAIO J. 2012, 58, 363–372. [Google Scholar] [CrossRef] [PubMed]
- Rezaienia, M.A.; Paul, G.; Avital, E.; Rothman, M.; Korakianitis, T. Computational Parametric Study of the Axial and Radial Clearances in a Centrifugal Rotary Blood Pump. ASAIO J. 2018, 64, 643–650. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Wang, W.; Xu, Q.; Leng, J.; Zheng, P.; Yang, Y. Three-dimensional Automatic FEM Mesh Generation for Full-wave Electromagnetic Simulations. In Proceedings of the 2020 IEEE MTT-S International Conference on Numerical Electromagnetic and Multiphysics Modeling and Optimi-zation (NEMO), Hangzhou, China, 7–9 December 2020. [Google Scholar]
- Olsen, D.B. The History of Continuous-Flow Blood Pumps. Artif. Organs 2000, 24, 401–404. [Google Scholar] [CrossRef] [PubMed]
- Gouskov, A.M.; Lomakin, V.O.; Banin, E.; Kuleshova, M.S. Assessment of Hemolysis in a Ventricular Assist Axial Flow Blood Pump. Biomed. Eng. 2016, 50, 233–236. [Google Scholar] [CrossRef]
- Wang, S.; Tan, J.; Yu, Z. Study on the influence of dynamic/static interface processing methods on CFD simulation results of the axial-flow blood pump. Adv. Mech. Eng. 2020, 12, 1–12. [Google Scholar] [CrossRef]
- Yu, Z.; Tan, J.; Wang, S.; Guo, B. Structural improvement study of streamline design method, conical hub, and auxiliary blades for axial blood pump. Int. J. Artif. Organs 2020, 44, 251–261. [Google Scholar] [CrossRef] [PubMed]
- Carneiro, J.; Lima, R.; Campos, J.B.L.M.; Miranda, J.M. A microparticle blood analogue suspension matching blood rheology. Soft Matter 2021, 17, 3963–3974. [Google Scholar] [CrossRef] [PubMed]
- Giersiepen, M.; Wurzinger, L.; Opitz, R.; Reul, H. Estimation of Shear Stress-related Blood Damage in Heart Valve Prostheses—In Vitro Comparison of 25 Aortic Valves. Int. J. Artif. Organs 1990, 13, 300–306. [Google Scholar] [CrossRef] [PubMed]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, W.; Peng, S.; Xiao, W.; Hu, Y.; Wu, H.; Li, M. CFD-Based Flow Channel Optimization and Performance Prediction for a Conical Axial Maglev Blood Pump. Sensors 2022, 22, 1642. https://doi.org/10.3390/s22041642
Yang W, Peng S, Xiao W, Hu Y, Wu H, Li M. CFD-Based Flow Channel Optimization and Performance Prediction for a Conical Axial Maglev Blood Pump. Sensors. 2022; 22(4):1642. https://doi.org/10.3390/s22041642
Chicago/Turabian StyleYang, Weibo, Sijie Peng, Weihu Xiao, Yefa Hu, Huachun Wu, and Ming Li. 2022. "CFD-Based Flow Channel Optimization and Performance Prediction for a Conical Axial Maglev Blood Pump" Sensors 22, no. 4: 1642. https://doi.org/10.3390/s22041642
APA StyleYang, W., Peng, S., Xiao, W., Hu, Y., Wu, H., & Li, M. (2022). CFD-Based Flow Channel Optimization and Performance Prediction for a Conical Axial Maglev Blood Pump. Sensors, 22(4), 1642. https://doi.org/10.3390/s22041642