In our previous study [
7], we conducted a preliminary study on mowing that analyzed the different mowing patterns, including typical mowing, top-down mowing, and bottom-up mowing. We focus on the typical mowing on slopes, which has the highest risk of the three patterns. This section describes the experimental results, discusses the similarities and differences between the different patterns of typical slope mowing, and further confirms the effect of joint angles variation on the risk of falling. The statistical software IBM Statistical Package for the Social Sciences (SPSS) Statistics 25 was used for related analyses.
4.1. Experiments
Based on the experiments conducted in previous studies [
7,
12], to obtain the most realistic data on the mowing movements of elderly people, we conducted a new round of experiments on the slope of the paddy field in Kouchi-cho, Higashi-Hiroshima City, Hiroshima Prefecture, Japan.
Figure 4 shows the geography and mowing operation trajectory of the selected experimental area.
The area has a large slope angle (slope depth is over 10 m) and the weeds grow so tall that a normal mower robot cannot operate on the area. It requires the mowing worker to make several horizontal trips back and forth to cut the grass manually.
Four experienced mowing workers participated in this experiment. Each participant was over 65 years old and had 10 or more years of slope-mowing experience. The details of the experimental subjects are shown in
Table 3.
All subjects in the experiment used the most common type of mower shown in
Figure 5, which is a gasoline-powered U-handle-type mower for a right-hander that allows the operator to turn the front section of the saw teeth using the button on the U-shaped handle of the mower.
All subjects were right-handed and the mowers they used were specifically designed for right-handed people. Moreover, no participants had any cognitive disorder problems, and they were in good health and had normal vision.
To increase the authenticity of the collected data, the subjects were not given any special instructions during the data-collection phase; they were only required to perform the usual mowing work. With confirmation that these additional devices did not interfere with the normal activities of the subjects, all subjects in the trial were equipped with Xsens MVN motion-capture devices. Additional interviews were conducted at the end of all experiments to determine the details could not be obtained visually. In addition to the data collected through the motion-capture device, the movements of the subjects were recorded in real time by the 4k camera on the side and compared to the collected motion data later.
The experiment was completed in September 2020, and a supplementary experiment was carried out in September 2021. A total of 627 sets of mowing movements on slopes were collected for analysis. To make the 3D model more accurate, we also collected additional physical and personal data of the subjects as shown in
Table 4.
4.2. Analysis for Different Patterns of Mowing on Slopes
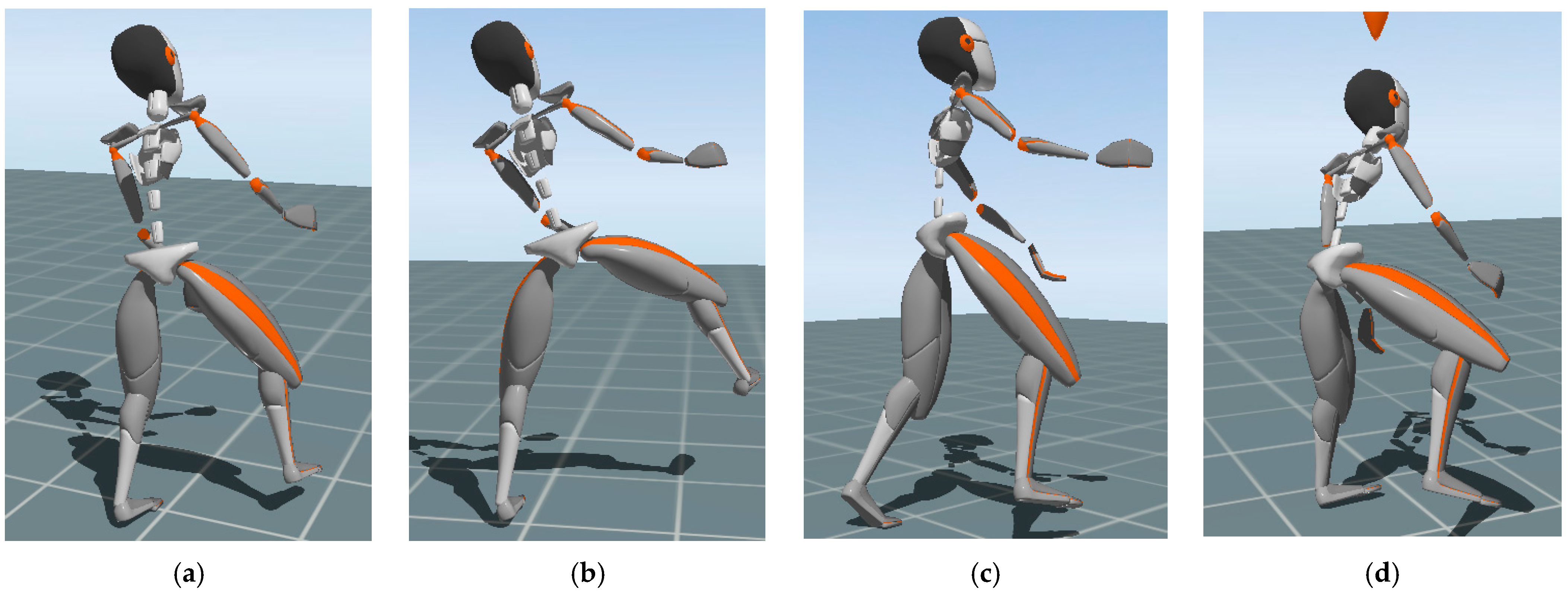
Through experimental correlation image (especially the lower-body posture of workers) analysis and interviews with subjects, we found that the classic mowing action on slopes can be divided into four different patterns. As shown in
Figure 6, we classified the movements of the subjects into the following four patterns based on their basic posture: basic, stride, moving mowing, and downward mowing actions.
Basic mowing action refers to the mowing action performed on the weeds in front of the subject while standing naturally with both feet. Stride mowing action refers to the mowing action where the subject takes a large stride with one foot in order to maintain stability.
Moving mowing motion refers to the mowing action when the subject moves his or her position to perform the mowing task better. Stride and moving motions are both performed while mowing weeds in front of the subject. Finally, downward mowing motion refers to the mowing motion performed to the weeds below the subject, with the subject’s feet in their natural state. As per the mowing operation trajectory shown in
Figure 4, the subjects did not mow the weeds above them, to avoid danger.
Through basic statistics, as shown in
Table 5, we found that among all the data, various actions remained on the order of 50–100, except for the “basic mowing action” (B) action, which was the most common. Therefore, we focus on the similarities and differences between various other patterns and the B action.
Based on the chi-square analysis of the data, we learned that target variables do not conform to the normal distribution. Therefore, to distinguish the similarities and differences between these patterns, the Kruskal–Wallis one-way ANOVA is used to analyze the difference between the characteristic quantities of these types of actions.
As shown in
Table 6, the results of the Kruskal–Wallis one-way ANOVA show that significant differences are confirmed in all the measures we considered. The results prove that our classification for mowing actions is correct, and that each of the four different patterns has its own different characteristics. However, as there are four patterns involved in the analysis, we will focus on the results of the post hoc comparison.
We will discuss the similarities and differences of each of the post hoc results in three parts, including the upper body, lower body, and the waist vibration and mowing distance of hands.
4.2.1. Post Hoc Results for Upper-Body Mowing Actions
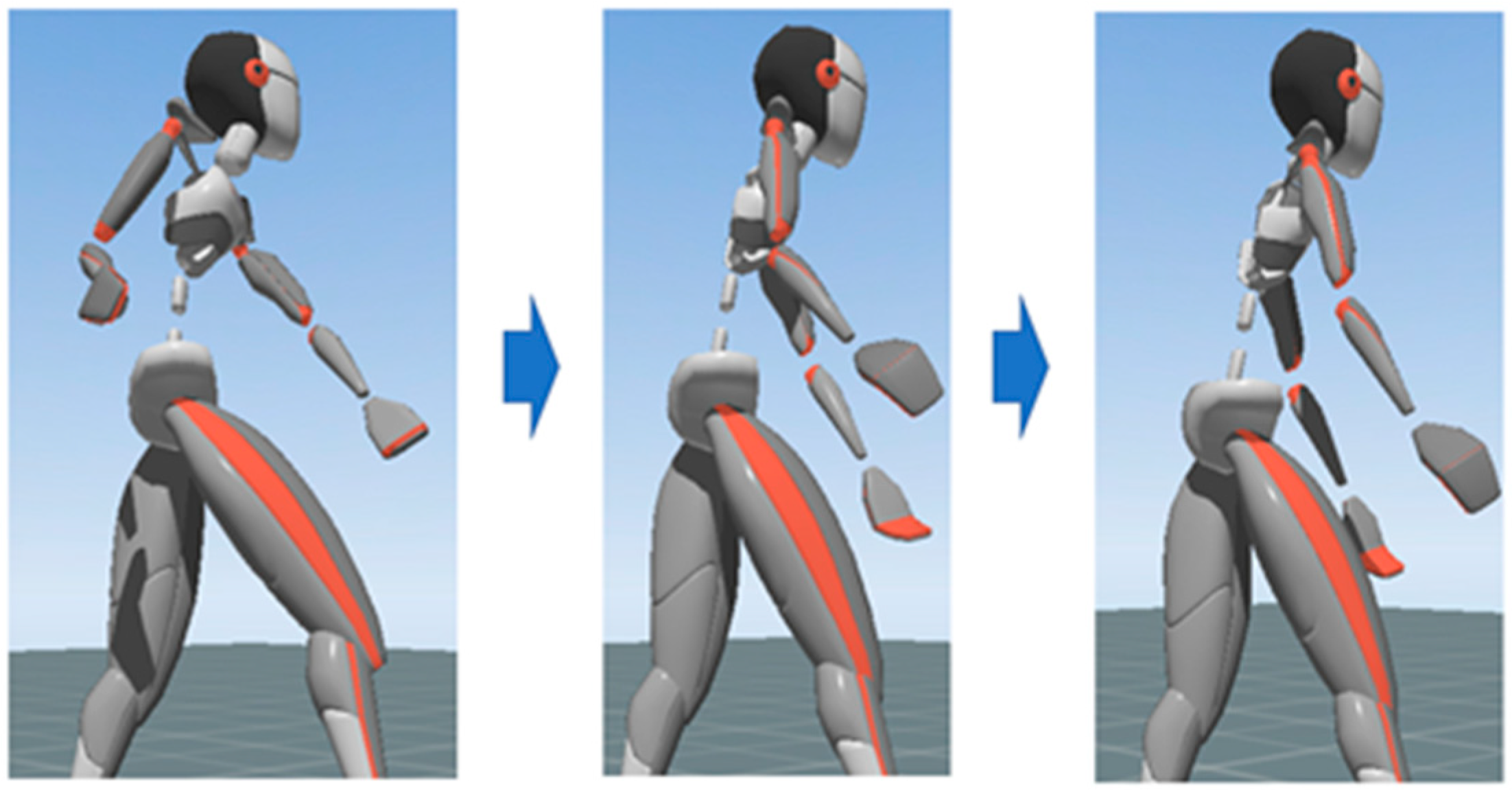
Through post-event questionnaires and interviews, we learned that in slope mowing, the body joint movements determine how the worker exerts his or her force and technique. As the way of mowing involves lifting the mower and exerting the force diagonally downward from right to left, the movement of the worker’s left and right hands and feet are different. As shown in
Figure 7, in terms of the variation of joint angles, the worker’s joint angles (e.g., elbow and knee) undergo a process from flexion to flatness when mowing. It can usually be assumed that the larger this amount of variation is, the more energy the worker outputs.
Therefore, for the upper-body joints, the results of post hoc analysis show that although there is significant difference in almost all movements between the four patterns, similarity also appears in some measures.
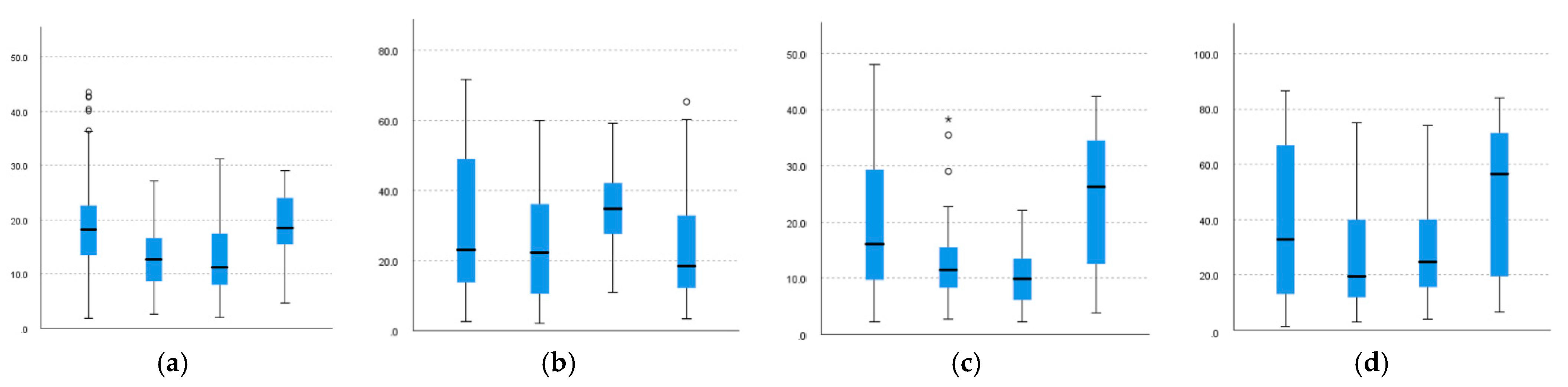
As shown in
Figure 8 and
Table 7, for the angle variation of the right elbow, similarities are observed between the patterns of the B–M and S–D pairs; the same results are also observed for the angle variation of the left elbow. The results also indicate that the B–M pair has a higher level than the S-D pair in the angle variation. A possible explanation for this result is that, in contrast to the S and D patterns, which need to change the upper posture to mow, the difference between B and M lies mainly in moving or not, the workers have similar upper-body movements and can output a greater force.
The right and left wrists need to be discussed separately. Through our investigation, the right hand is mainly responsible for pushing the mower to move, whereas the left hand is more responsible for lifting the mower.
For the right wrist, similarities are observed between the patterns of the B–M, B–S, and S–M pairs. Pattern S has a higher level than others in the angle variation. One possible explanation is that the right hand of the worker is primarily responsible for pushing the mower during mowing, especially when mowing downward, in which it requires more force to push the mower because the workers need to change the way they hold the control lever.
For the left wrist, similarities are observed between the patterns of B–D and S–D. Pattern M has a higher level than others in the angle variation. A possible explanation is that the worker needs to exert more force on the left hand to lift the mower when moving with pattern M.
4.2.2. Post Hoc Results for Lower-Body Mowing Actions
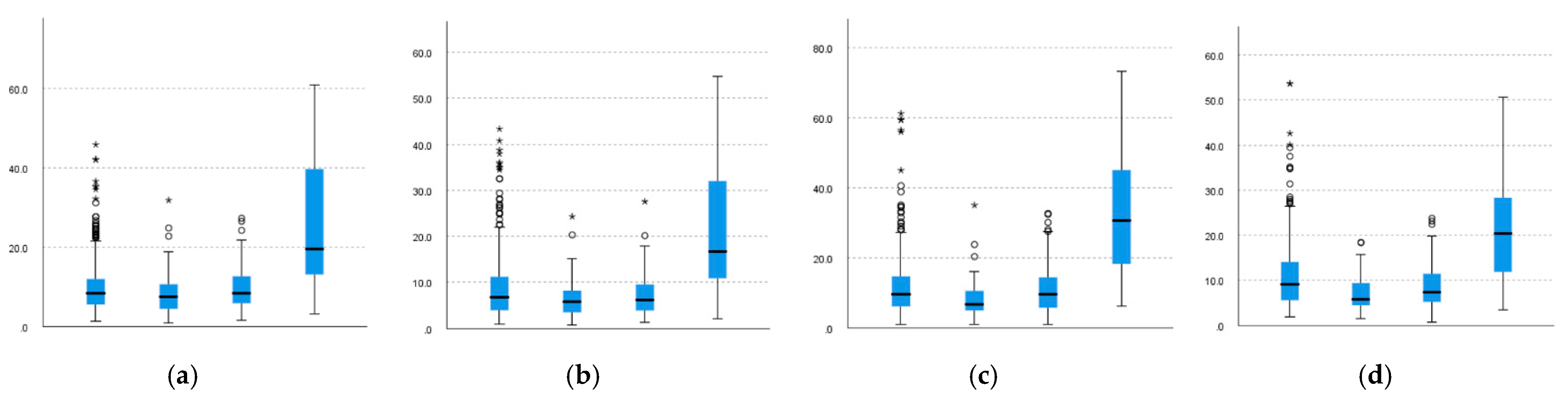
As shown in
Figure 9 and
Table 8, the results of post hoc analysis show that similarities are also observed between lower-body actions. Unlike the upper body, the lower-body movements become more undulating due to susceptibility to topography. Outliers as an element to reflect environmental impact are not removed from the analysis in this study because they are real data.
It is important to note that because of the characteristics of the pattern M, which is different from the other three patterns, only the data of M (having higher values than others) are listed and not compared and discussed in this paper. The comparison results of the other three patterns are as follows.
For the right knee and ankle, similarities are observed between the patterns of the B–S, B–D, and S–D pairs. As the standard pattern for mowing on a slope is to stand firmly with the right foot in front and the left foot at the back, the results mean that in all patterns, the right foot may be primarily responsible for maintaining balance and not for exerting force for mowing.
For the left knee, the similarity is observed between the pattern B–D, and for the left ankle, the similarity is observed between the patterns B–D and S–D, that each of the values of the S pattern is smaller than the others. The possible explanation is that the left foot, as the weight-bearing foot, does not change much in terms of force under pattern B and D, but in pattern S, owing to the forward shift of the center of gravity, its weight-bearing force is partially reduced.
4.2.3. Post Hoc Results for Waist Vibration and Mowing Distance of Hands
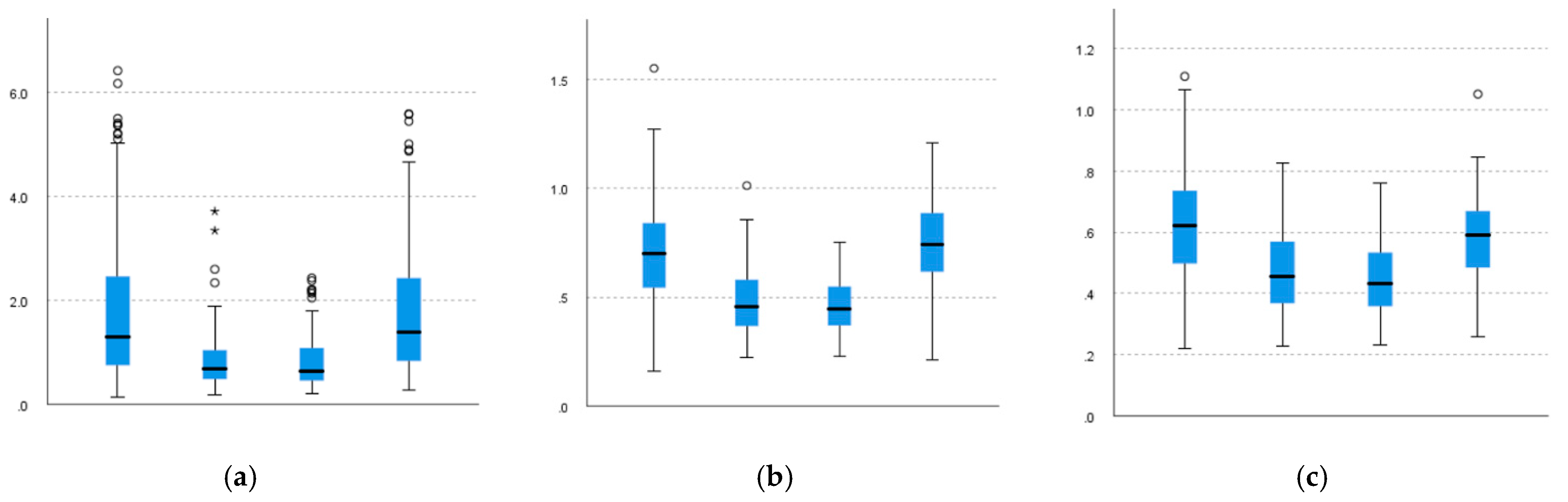
Lastly, for the post hoc results for waist vibration and moving distance of hands, as shown in
Figure 10 and
Table 9, similarity is also observed. In general, greater waist vibration represents a higher risk of falling, whereas an increase in the moving distance of hands can laterally indicate an increase in the force used.
For waist vibration and the moving distance of right hand and left hand, the analysis results show that similarities are observed between the patterns of the B-M and S-D pairs, which are similar to the results of the upper-body elbow analysis. If the explanation regarding the elbows’ angle variation (workers output more power in B and M patterns) is correct, this means that the output of greater force is subject to a greater risk of falling. The results of the moving distance by both hands corroborate this hypothesis.
Based on the analysis for different patterns of mowing on slopes, the results of the Kruskal–Wallis one-way ANOVA and related post hoc analysis show that among the four patterns, the B pattern has the highest number and, like the M pattern, allows workers to mow with maximum effort. Workers in the S and D patterns have to use slightly less force to mow to maintain balance. Therefore, if the conditions allow, the B and M patterns are recommended to use to increase efficiency when mowing on slopes. However, the results also show that when using the B and M patterns for mowing, workers need to be aware of falls, as higher efficiency means higher risk.
4.3. Analysis of Falling Risk of Elderly Workers When Mowing on Slopes
From the conclusion of
Section 4.1, posture is an important factor that affects the use of force during mowing. Therefore, based on pattern B with the largest amount of data, we attempted to analyze the factors affecting the safety of mowing on slopes via the method of stepwise regression. In addition to the variation of the angle of joints, individual factors of workers (e.g., age, experience, arm span etc.) were also considered as important influences.
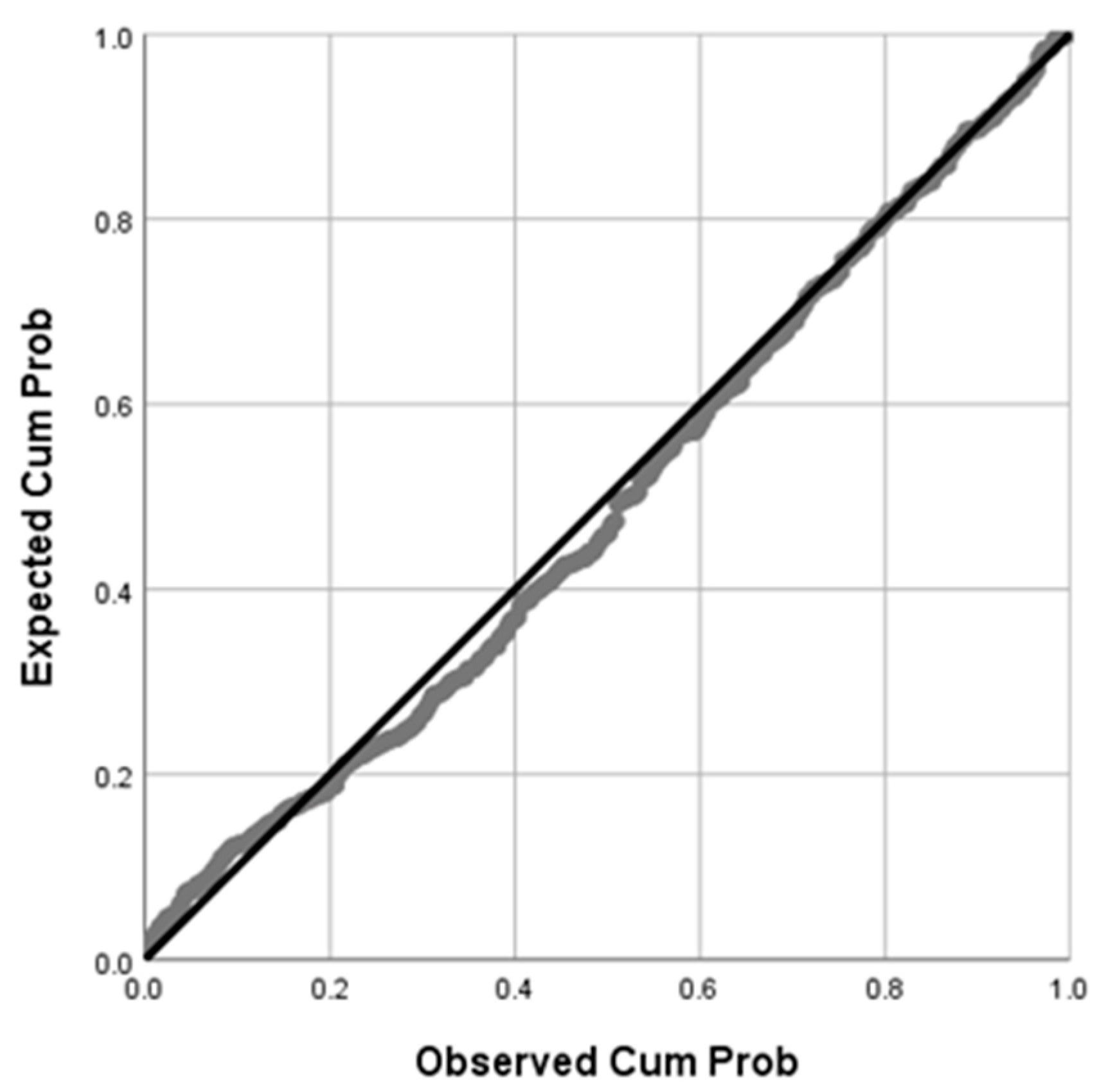
Thus, in the stepwise regression, the STDwaist, which represents the vibration of the waist joint, was set as the dependent variable, and the other measures were set as the independent variables.
To meet the conditions of stepwise regression analysis, after correlation pretreatment, as shown in
Figure 11, we determined that the dependent variable STDwaist in the analysis conforms to normal distribution.
As shown in
Table 10, the results of the stepwise regression model show that a total of five variables (VLelbow, VRelbow, VLwrist, Arm span and Age) significantly affect the dependent variables STDwaist, with the values of R: 0.847 and R2: 0.714 (
p-value < 0.01).
In terms of the magnitude of influence with the direction positive, the biggest two are the angle variation of the left elbow and right elbow, which mean that the force exerted while mowing is mainly by the angle variation of the joint of the worker’s elbow; the greater the angle variation, the greater the power output. However, sometimes it also means a higher waist vibration, which may cause a fall while mowing on the slope. Positive effects were also observed on the left wrist that may suggest that the force of holding the mower in the left hand also affects the vibration in the waist and further affects the possibility of falling. The results are consistent with those discussed in
Section 4.1.
The results show that in addition to the left and right elbow and left wrist, arm span and age also play a significant role as influencing factors. The effects are bigger, but the direction of the effects is negative.
The results of arm span analysis mean that the longer a person’s arm span, the less vibration their waist has while mowing. As the length of a person’s arms is often proportional to his physical size, this means that a worker who is not sufficiently strong may have to exert more effort to mow the grass, and may face a higher risk of falling while mowing on a slope.
Contrary to expectations, the results on the effect of workers’ age showed that elder workers had more stable waists while mowing on slopes. Because the experimental subjects had similar mowing experiences, one possible explanation is that older workers were more concerned with their body balance during work. This means that without physical limitations, workers over the age of 65 may have a safer body motion for slope mowing.
Based on the analysis of falling risk of elderly workers when mowing on slopes, the results of stepwise regression analysis are as follows. To reduce the possibility of falling while mowing, workers need to pay attention to the use of arm strength and take appropriate measures to reduce the risk of falls according to their age and physique.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}