
Rayleigh-Wave Dispersion Analysis and Inversion Based on the Rotation



Abstract
:1. Introduction
2. Theoretical Foundations
2.1. Calculation of the Rotational Component
2.2. Rayleigh Wave Simulation
2.3. Method of Surface-Wave Dispersive Energy Imaging and Surface-Wave Inversion
3. The Wave-Field Characteristics of the Typical Shallow Models
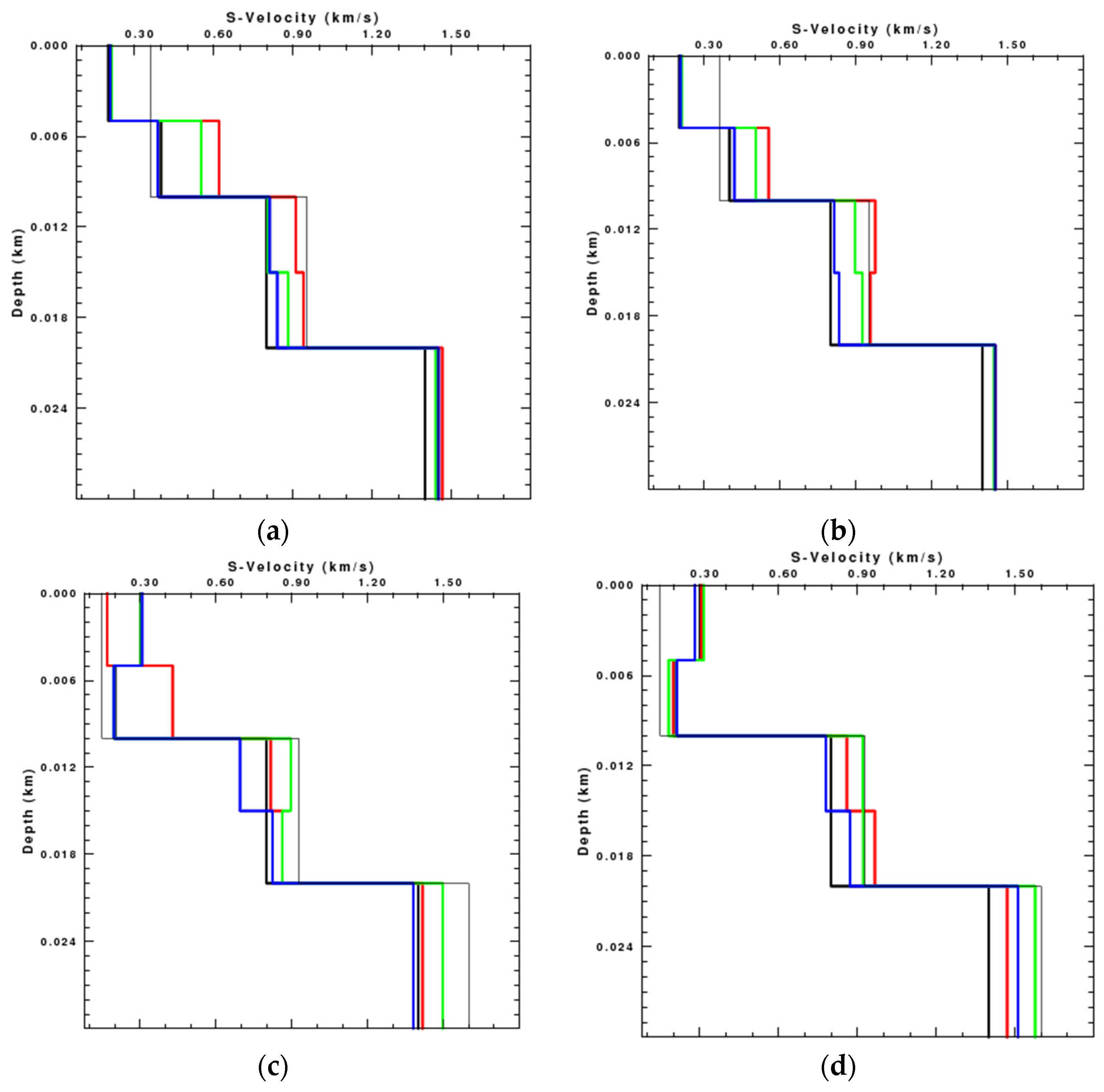
4. Rayleigh Wave Inversion
5. Noisy Synthetic Data Test
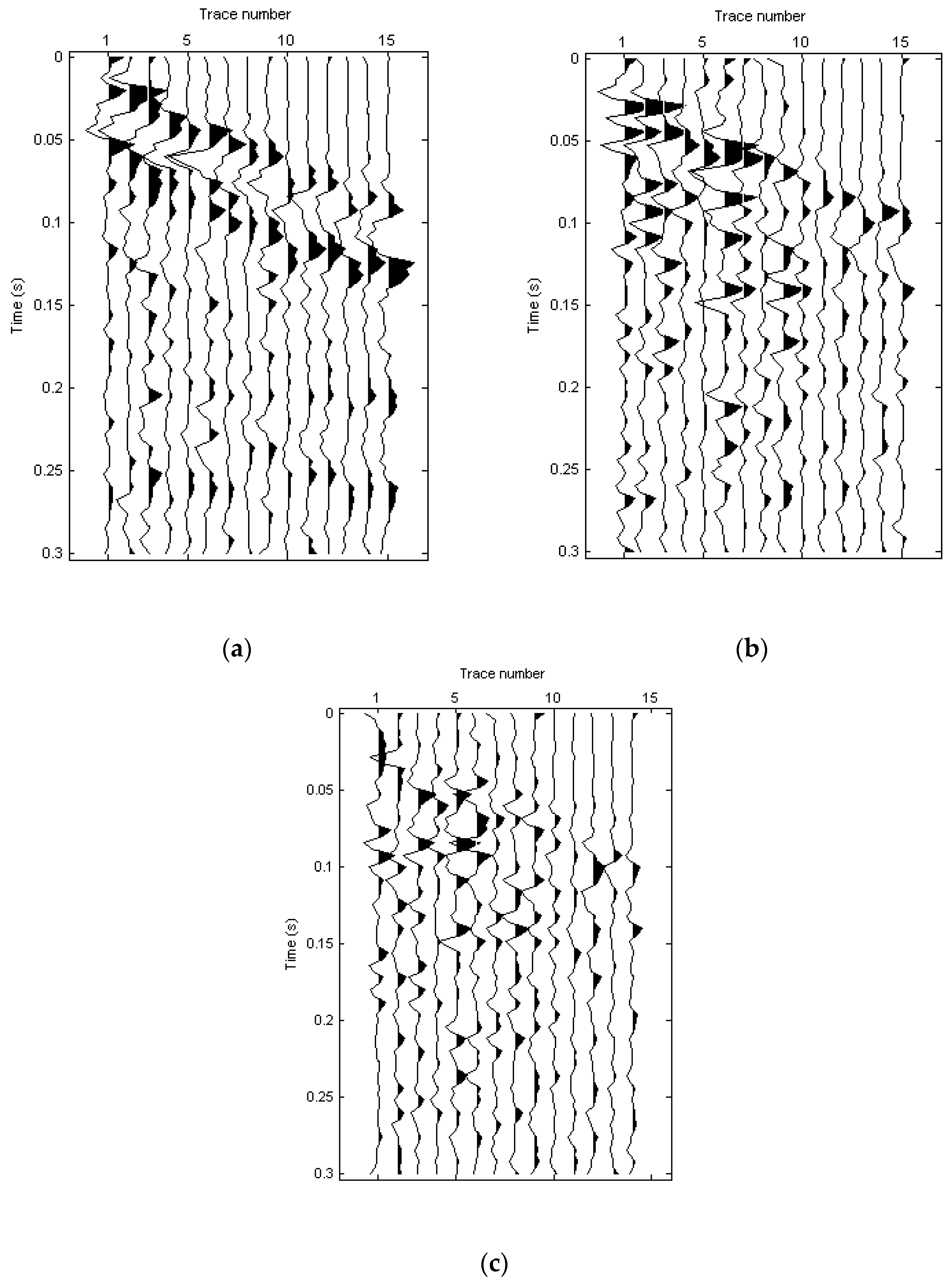
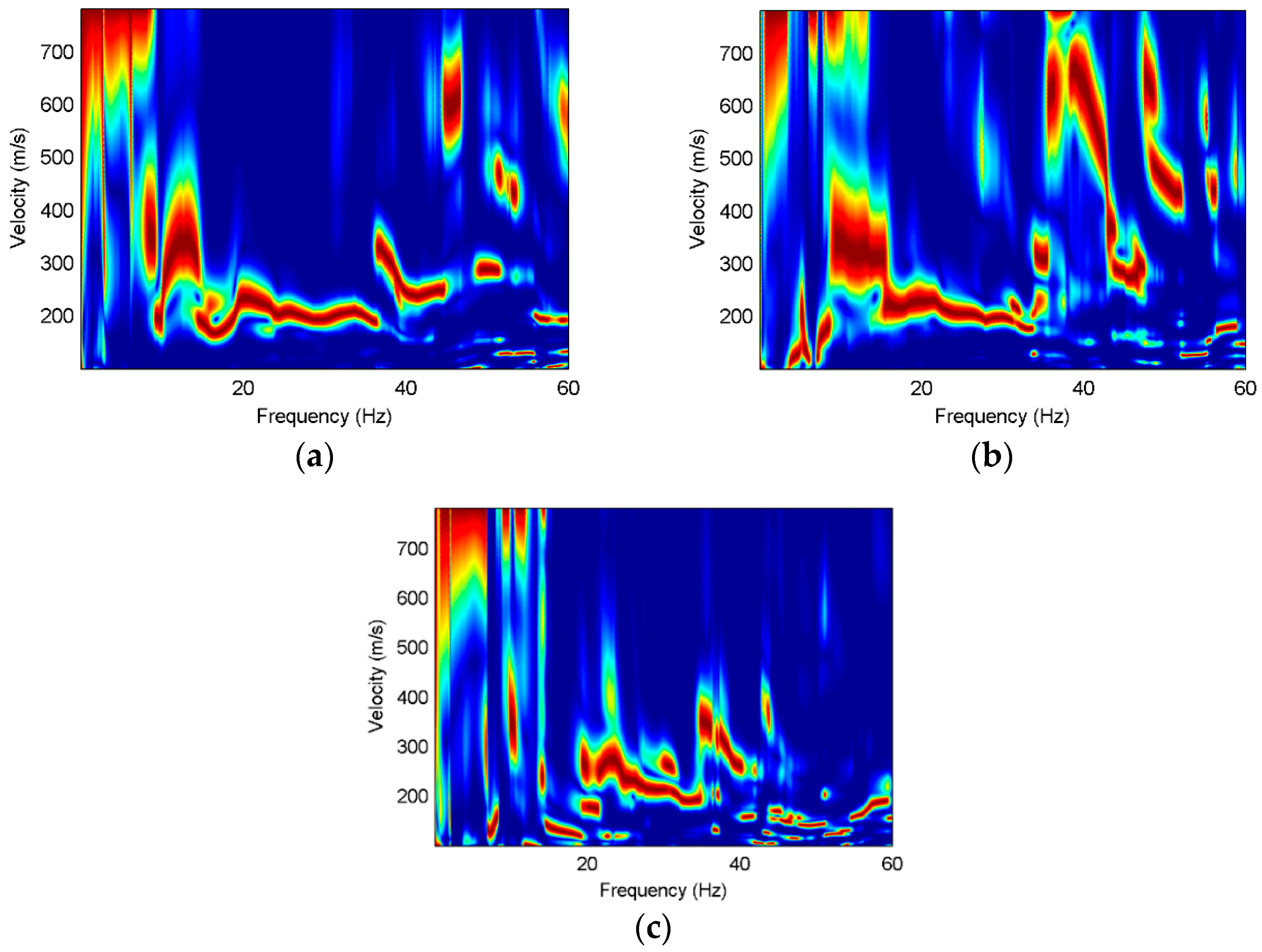
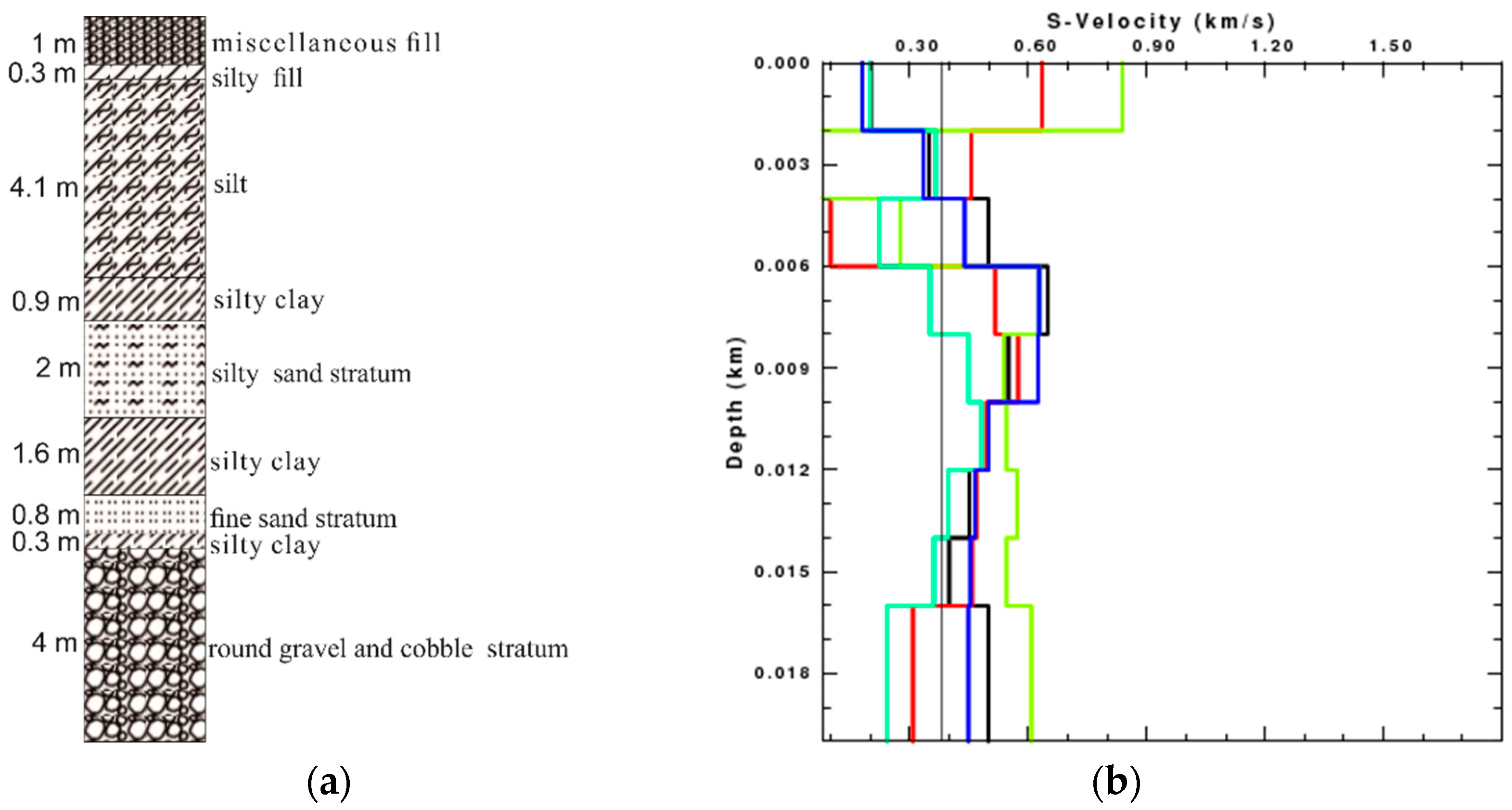
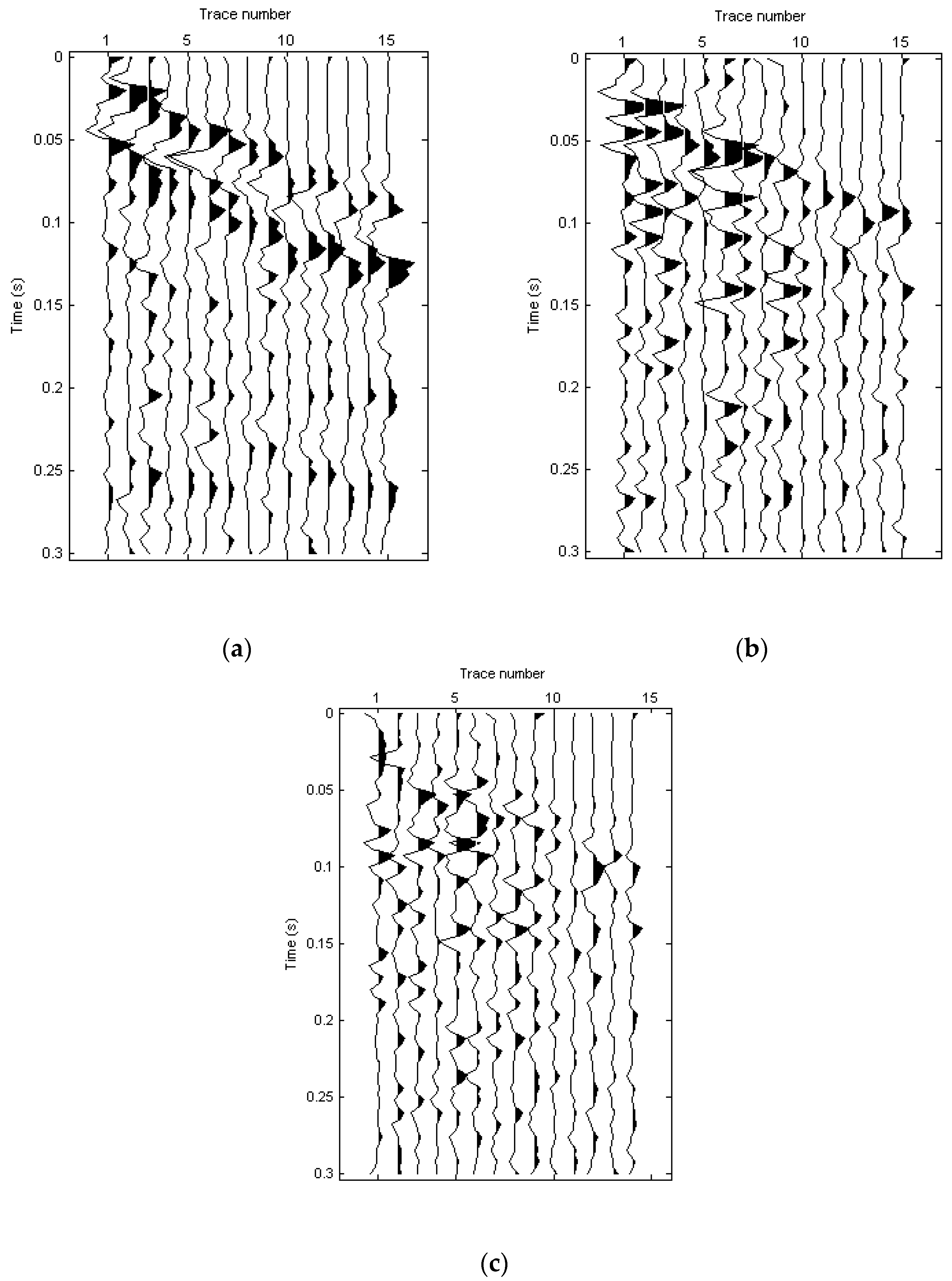
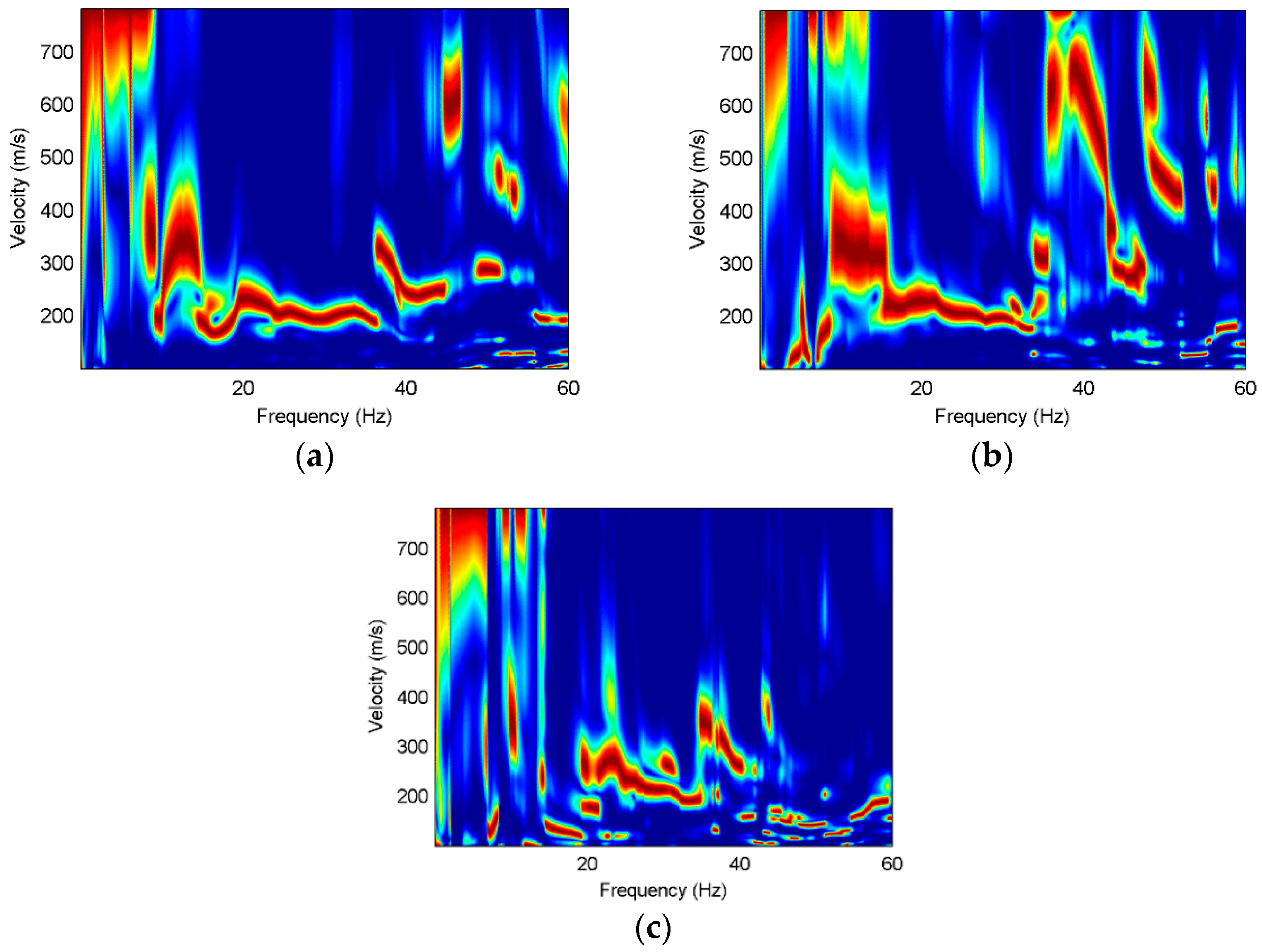
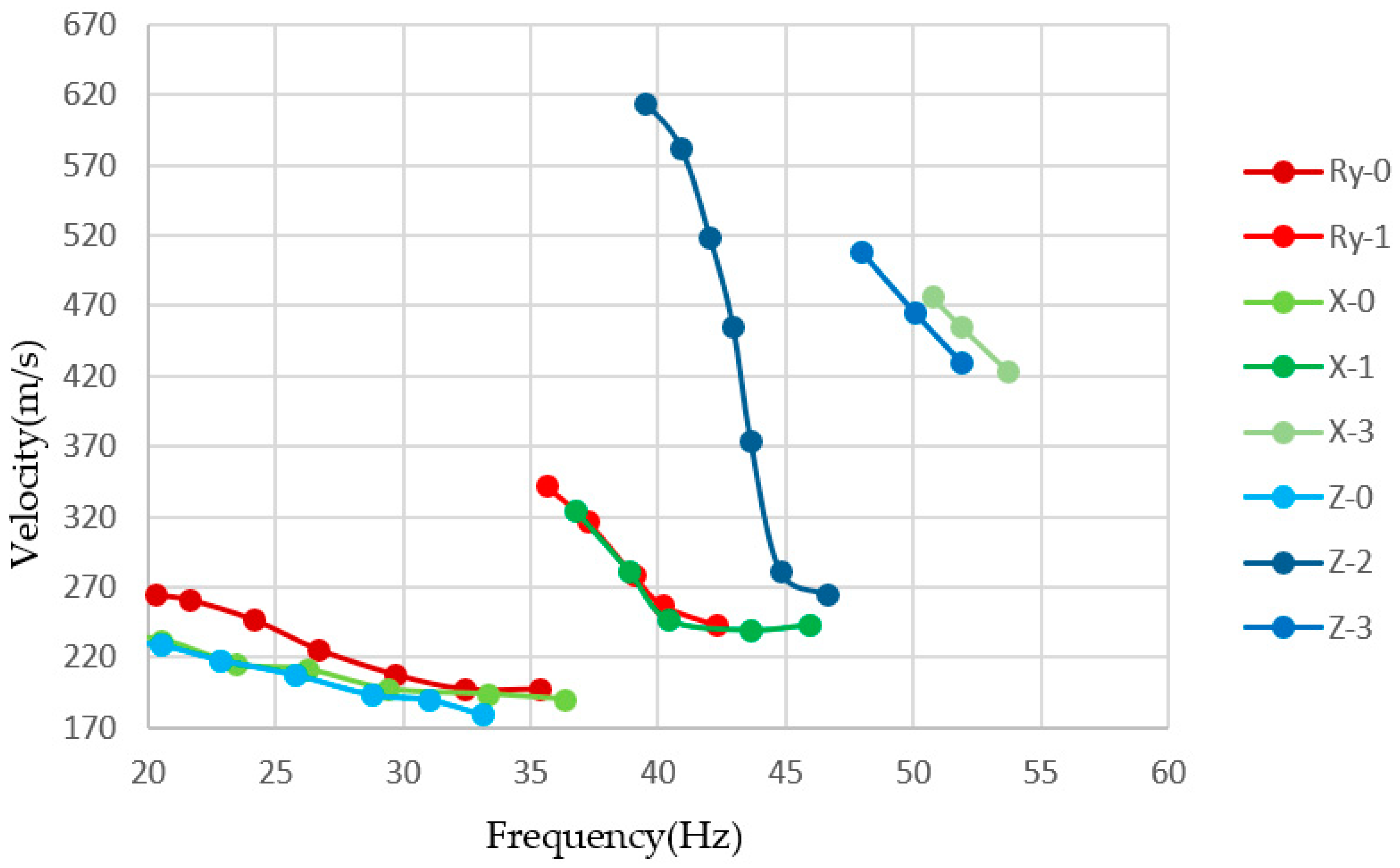
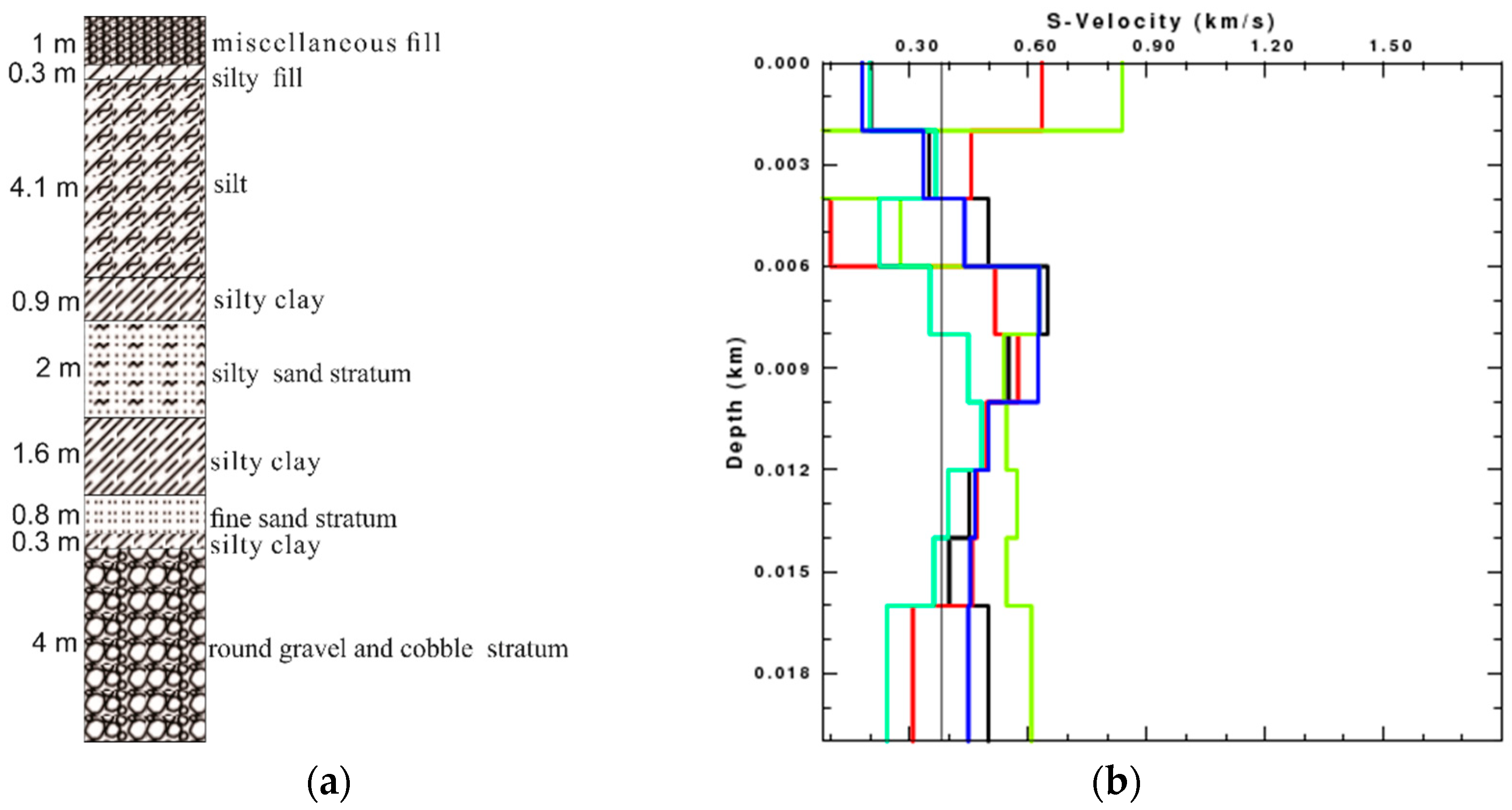
6. Field Seismic Data Test
7. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sato, Y. Analysis of dispersed surface waves by means of Frourier transform. Bull. Seismol. Soc. Am. 1955, 33, 33–48. [Google Scholar]
- Forsyth, D.W.; Webb, S.C.; Doman, L.M.; Shen, Y. Phase velocities of Rayleigh waves in the MELT experiment on the East Pacific Rise. Science 1998, 280, 1235–1238. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Campillo, M.; Paul, A. Long-range correlations in the diffuse seismic coda. Science 2003, 299, 547–549. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aki, K. Space and time spectra of stationary stochastic waves, with special reference to microtremors. Bull. Earthq. Res. Inst. 1957, 35, 415–456. [Google Scholar]
- Toksoz, M.N.; Lacoss, R.T. Microtremors-mode structure and sources. Science 1968, 159, 872–873. [Google Scholar] [CrossRef] [PubMed]
- Ling, S.Q. Research on the Estimation of Phase Velocites of Surface Waves in Microtremors. Ph.D. Thesis, Hokkaido University, Sapporo, Japan, 1994. (In Japanese). [Google Scholar]
- Igel, H.; Schreiber, U.; Flaws, A.; Schuberth, B.; Velikoseltsev, A.; Cochard, A. Rotational motions induced by the M8. 1 Tokachi-oki earthquake, September 25, 2003. Geophys. Res. Lett. 2005, 32, L08309. [Google Scholar] [CrossRef] [Green Version]
- Kurrle, D.; Igel, H.; Ferreira, A.M.G.; Wassermann, J.; Schreiber, U. Can we estimate local Love wave dispersion properties from collocated amplitude measurements of translations and rotations? Geophys. Res. Lett. 2010, 37, L04307. [Google Scholar] [CrossRef]
- Xia, J.; Miller, R.D.; Park, C.B. Estimation of near-surface shear-wave velocity by inversion of Rayleigh waves. Geophysics 1999, 64, 691–700. [Google Scholar] [CrossRef] [Green Version]
- Lu, L.; Wang, C.; Zhang, B. Inversion of multimode Rayleigh waves in the presence of a low-velocity layer: Numerical and laboratory study. Geophys. J. Int. 2007, 168, 1235–1246. [Google Scholar] [CrossRef] [Green Version]
- Wen, J.C.; Shi, Y.X.; Ning, J.Y. Measurement of high-speed rail surface-wave phase-velocity dispersion. Chin. J. Geophys. 2021, 64, 3246–3256. (In Chinese) [Google Scholar] [CrossRef]
- Wang, B.S.; Zeng, X.F.; Song, Z.H.; Li, X.B. Seismic observation and subsurface imaging using an urban telecommunication optic-fiber cable. Chin. Sci. Bull. 2021, 66, 2590–2595. [Google Scholar] [CrossRef]
- Tokimatsu, K.; Tamura, S.; Kojima, H. Effects of multiple modes on Rayleigh wave dispersion characteristics. J. Geotech. Eng. 1992, 118, 1529–1543. [Google Scholar] [CrossRef]
- Xia, J.H.; Miller, R.D.; Park, C.B.; Tian, G. Inversion of high frequency surface waves with fundamental and higher modes. J. Appl. Geophys. 2003, 52, 45–57. [Google Scholar] [CrossRef]
- Feng, S.K.; Sugiyama, T.; Yamanaka, H. Effectiveness of multi-mode surface wave inversion in shallow engineering site investigations. Explor. Geophys. 2005, 36, 26–33. [Google Scholar] [CrossRef]
- Pan, L.; Chen, X.F.; Wang, J.N.; Yang, Z.T.; Zhang, D.Z. Sensitivity analysis of dispersion curves of Rayleigh waves with fundamental and higher modes. Geophys. J. Int. 2019, 216, 1276–1303. [Google Scholar] [CrossRef]
- Zhou, X.H.; Lin, J.; Zhang, H.Z.; Jiao, J. Mapping extraction dispersion curves of multi-mode Rayleigh waves in microtremors. Chin. J. Geophys. 2014, 57, 2631–2643. (In Chinese) [Google Scholar]
- Song, X.; Gu, H.; Liu, J.; Zhang, X. Estimation of shallow subsurface shear-wave velocity by inverting fundamental and higher-mode Rayleigh waves. Soil Dyn. Earthq. Eng. 2007, 27, 599–607. [Google Scholar] [CrossRef]
- Mi, B.; Xia, J.; Shen, C.; Wang, L. Dispersion energy analysis of Rayleigh and Love waves in the presence of low-velocity layers in near-surface seismic surveys. Surv. Geophys. 2018, 39, 271–288. [Google Scholar] [CrossRef]
- Wang, J.N.; Wu, G.X.; Chen, X.F. Frequency-Bessel transform method for effective imaging of higher-mode Rayleigh dispersion curves from ambient seismic noise data. J. Geophys. Res.—Solid Earth 2019, 124, 3708–3723. [Google Scholar] [CrossRef] [Green Version]
- Ikeda, T.; Matsuoka, T.; Tsuji, K.; Hayashi, K. Multimode inversion with amplitude response of surface waves in the spatial autocorrelation method. Geophys. J. Int. 2012, 190, 541–552. [Google Scholar] [CrossRef] [Green Version]
- Okada, H.; Suto, K. The Microtremor Survey Method; Society of Exploration Geophysicists: Tulsa, OK, USA, 2003. [Google Scholar]
- Zhang, B.X.; Lu, L.Y.; Bao, G.S. A study on zigzag dispersion curves in Rayleigh wave exploration. Chin. J. Geophys. 2002, 45, 263–274. (In Chinese) [Google Scholar] [CrossRef]
- Xu, P.F.; Du, Y.N.; Ling, S.Q.; You, Z.W.; Yao, J.; Zhang, H. Microtremor survey method based on inversion of the SPAC coefficient of multi-mode Rayleigh waves and its application. Chin. J. Geophys. 2020, 63, 3857–3867. (In Chinese) [Google Scholar] [CrossRef]
- Luo, Y.; Xia, J.; Miller, R.D.; Xu, Y.; Liu, J.; Liu, Q. Rayleighwave dispersive energy imaging using a high-resolution linear radon transform. Pure Appl. Geophys. 2008, 165, 903–922. [Google Scholar] [CrossRef]
- Qiu, X.; Wang, Y.; Wang, C. Rayleigh-wave dispersion analysis using complex-vector seismic data. Near Surf. Geophys. 2019, 17, 487–499. [Google Scholar] [CrossRef]
- Boaga, J.; Cassiani, G.; Strobbia, C.L.; Vignoli, G. Mode misidentification in Rayleigh waves: Ellipticity as a cause and a cure. Geophysics 2013, 78, 17–28. [Google Scholar] [CrossRef]
- Ikeda, T.; Matsuoka, T.; Tsuji, T.; Nakayama, T. Characteristics of the horizontal component of Rayleigh waves in multimode analysis of surface waves. Geophysics 2015, 80, EN1–EN11. [Google Scholar] [CrossRef] [Green Version]
- Dal Moro, G.; Ferigo, F. Joint analysis of Rayleigh-and love-wave dispersion: Issues, criteria and improvements. J. Appl. Geophys. 2011, 75, 573–589. [Google Scholar] [CrossRef]
- Dal Moro, G.; Moura, R.M.M.; Moustafa, S.S. Multi-component joint analysis of surface waves. J. Appl. Geophys. 2015, 119, 128–138. [Google Scholar] [CrossRef]
- Dal Moro, G.; Moustafa, S.S.; Al-Arifi, N.S. Improved holistic analysis of Rayleigh waves for single-and multi-offset data: Joint inversion of Rayleigh-wave particle motion and vertical-and radial-component velocity spectra. Pure Appl. Geophys. 2018, 175, 67–88. [Google Scholar] [CrossRef] [Green Version]
- Fichtner, A.; Igel, H. Sensitivity densities for rotational ground-motion measurements. Bull. Seismol. Soc. Am. 2009, 99, 1302–1314. [Google Scholar] [CrossRef]
- Sun, L.X.; Wang, Y.; Yang, J.; Zhang, Y.B.; Wang, S.C. Progress in Rotational Seismology. Earth Sci. 2021, 46, 1518–1536. [Google Scholar] [CrossRef]
- Kurzych, A.T.; Jaroszewicz, L.R.; Dudek, M.; Kowalski, J.K.; Bernauer, F.; Wassermann, J.; Igel, H. Measurements of Rotational Events Generated by Artificial Explosions and External Excitations Using the Optical Fiber Sensors Network. Sensors 2020, 20, 6107. [Google Scholar] [CrossRef]
- Bońkowski, P.A.; Bobra, P.; Zembaty, Z.; Jędraszak, B. Application of Rotation Rate Sensors in Modal and Vibration Analyses of Reinforced Concrete Beams. Sensors 2020, 20, 4711. [Google Scholar] [CrossRef] [PubMed]
- Sollberger, D.; Igel, H.; Schmelzbach, C.; Edme, P.; Manen, D.V.; Bernauer, F.; Yuan, S.H.; Wassermann, J.; Schreiber, U.; Robertsson, J.O.A. Seismological Processing of Six Degree-of-Freedom Ground-Motion Data. Sensors 2020, 20, 6904. [Google Scholar] [CrossRef]
- Aki, K.; Richardson, P.G. Quantitative Seismology: Theory and Methods; Freeman and Co.: San Francisco, CA, USA, 1980. [Google Scholar]
- Aki, K.; Richards, P.G. Quantitative Seismology, 2nd ed.; University Science Book: Herndon, CA, USA, 2002; 700p. [Google Scholar]
- Lee, C.E.B.; Celebi, M.; Todorovska, M.I.; Diggles, M.F. Rotational Seismology and Engineering Applications. In Proceedings of the First International Workshop, Menlo Park, CA, USA, 18–19 September 2007; United States Geological Survey: Reston, VA, USA, 2007. [Google Scholar]
- Doug, C. The State of Land Seismic. First Break 2018, 36, 65–67. [Google Scholar]
- Savazzi, S.; Spagnolini, U.; Goratti, L.; Molteni, D.; Latva-aho, M.; Nicoli, M. Ultra-Wide Band Sensor Networks in Oil and Gas Explorations. IEEE Commun. Mag. 2013, 51, 150–160. [Google Scholar] [CrossRef]
- Reddy, V.A.; Stuber, G.L.; Al-Dharrab, S.; Mesbah, W.; Muqaibel, A.H. A Wireless Geophone Network Architecture Using IEEE 802.11af with Power Saving Schemes. IEEE Trans. Wirel. Commun. 2019, 18, 5967–5982. [Google Scholar] [CrossRef]
- Barak, O.; Herkenhoff, F.; Dash, R.; Jaiswal, P.; Giles, J.; Ridder, S.; Brune, R.; Ronen, S. Six-component seismic land data acquired with geophones and rotation sensors: Wave-mode selectivity by application of multicomponent polarization filtering. Lead. Edge 2014, 33, 1224–1232. [Google Scholar] [CrossRef]
- Cochard, A.; Igel, H.; Schuberth, B.; Suryanto, W.; Velikoseltsev, A.; Schreiber, U.; Wassermann, J.; Scherbaum, F.; Vollmer, D. Rotational Motions in Seismology: Theory, Observation, Simulation. In Earthquake Source Asymmetry, Structural Media and Rotation Effects; Springer: Berlin/Heidelberg, Germany, 2006; pp. 391–411. [Google Scholar]
- Herrmann, R.B. Computer Programs in Seismology. Open Files. 2003. Available online: https://www.eas.slu.edu/People/RBHerrmann/CPS330.html (accessed on 15 March 2019).
- Herrmann, R.B.; Ammon, C.J. Computer Programs in Seismology—3.30: Surface Waves, Receiver Functions and Crustal Structure. 2002. Available online: www.eas.slu.edu/People/RBHerrmann/CPS330.html (accessed on 15 March 2019).
- Sun, L.; Zhang, Z.; Wang, Y. Six-component elastic-wave simulation and analysis. In Proceedings of the EGU General Assembly EGU2018, Vienna, Austria, 4–13 April 2018; Geophysical Research Abstracts, EGU2018-14930-1. Volume 20, p. 14930. [Google Scholar]
- Zhang, Z.; Sun, L.X.; Tang, G.B.; Xu, T.; Wang, Y.; Wang, M.L.; Guo, X. Numerical simulation of the six-component elastic-wave field. Chin. J. Geophys. 2020, 63, 2375–2385. [Google Scholar]
- Li, D.; Wang, Y.; Sun, L. Calculating Rotational Components of Ground Motions by Finite Difference Method. Earth Sci. 2021, 46, 369–380. [Google Scholar] [CrossRef]
- Dong, Z.; Yuan, X.; Yang, B. On construction technique of mechanical holepile methods for subway station of underground excavation. Shanxi Archit. 2017, 43, 171–173. [Google Scholar]
- Oliveira, C.S.; Bolt, B.A. Rotational Components of Surface Strong Ground Motion. Earthq. Eng. Struct. Dyn. 1989, 18, 517–526. [Google Scholar] [CrossRef]
- Suryanto, W.; Igel, H.; Wassermann, J.; Cochard, A.; Schuberth, B.; Vollmer, D.; Scherbaum, F.; Schreiber, U.; Velikoseltsev, A. First Comparison of Array-Derived Rotational Ground Motions with Direct Ring Laser Measurements. Bull. Seismol. Soc. Am. 2006, 96, 2059–2071. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
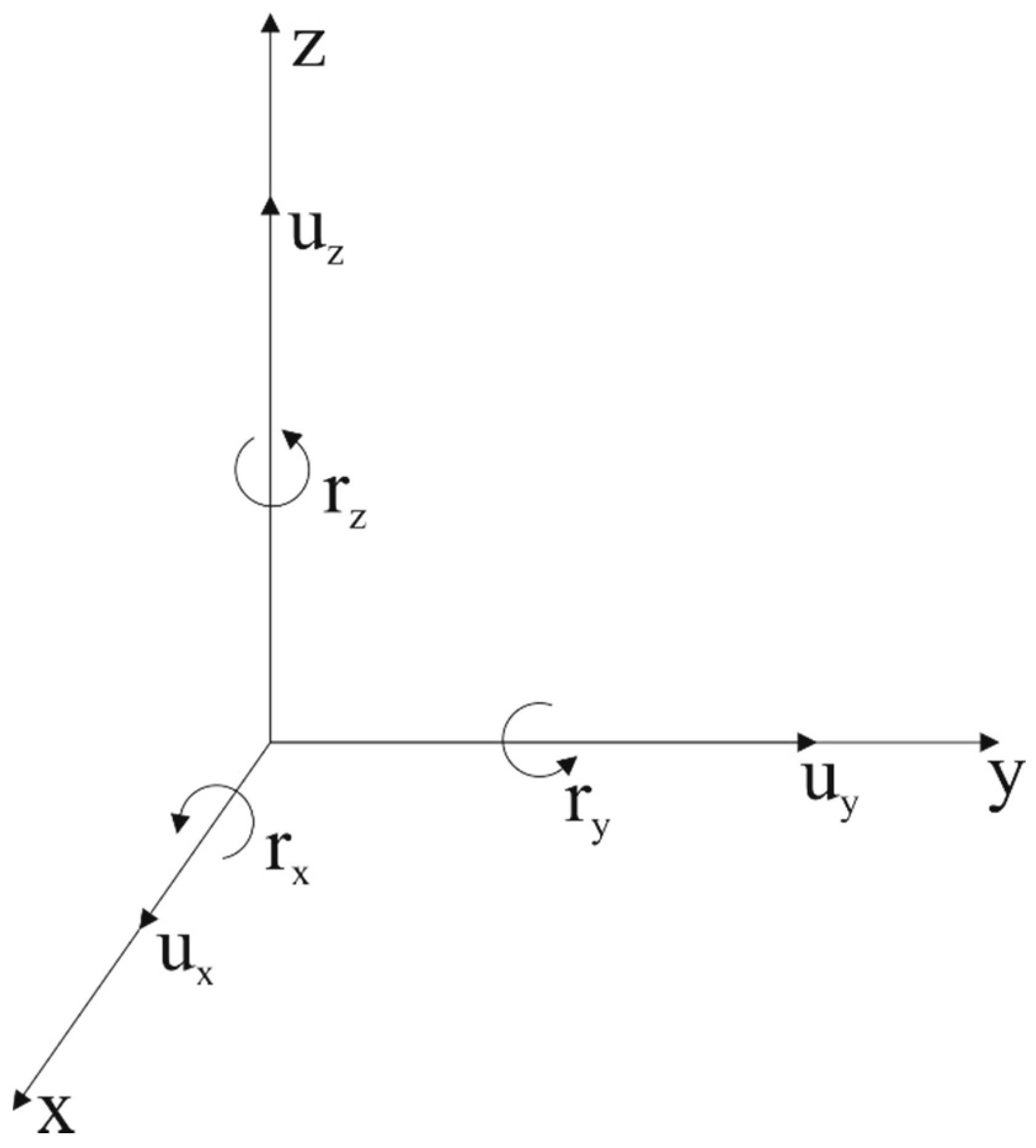
| Axis | Translation | Rotation | ||
|---|---|---|---|---|
| x | Radial | ux | Roll | rx |
| y | Transverse | uy | Pitch | ry |
| z | Vertical | uz | Yaw | rz |
| Model 1 | Model 2 | Model 3 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Thickness | Vp | Vs | Den | Vp | Vs | Den | Vp | Vs | Den |
| 5 | 600 | 200 | 1800 | 1100 | 300 | 1850 | 600 | 200 | 1800 |
| 5 | 1200 | 400 | 1900 | 600 | 200 | 1800 | 1800 | 800 | 2000 |
| 10 | 1800 | 800 | 2000 | 1800 | 800 | 2000 | 1300 | 600 | 1950 |
| - | 2900 | 1400 | 2100 | 2900 | 1400 | 2100 | 2900 | 1400 | 2100 |
| Component | Fundamental Mode (Hz) | First Higher Mode (Hz) | Second Higher Mode (Hz) | Third Higher Mode (Hz) | |
|---|---|---|---|---|---|
| Model 1 | radial | 10–15, 18–100 | 12–15 | - | 50–58 |
| vertical | 10–100 | 44–50 | 68–72 | - | |
| rotational | 10–15, 18–100 | 12–15, 22–42 | 32–42, 60–84 | 48–86, 92–100 | |
| Model 2 | radial | 8–32 | 32–54 | 44–75 | 30–36 |
| vertical | 8–32 | 26–54 | 36–75 | - | |
| rotational | 8–32 | 22–28, 32–54 | 44–75 | 28–52 |
| Depth (m) | X | Z | Ry | X + Z + Ry | |
|---|---|---|---|---|---|
| 0~2 | 0.435 | 0.638 | −0.001 | −0.021 | |
| 2~4 | 0.105 | −0.301 | 0.016 | 0.005 | |
| 4~6 | −0.401 | −0.224 | −0.278 | −0.061 | |
| 6~8 | −0.135 | −0.022 | −0.299 | −0.023 | |
| 8~10 | 0.024 | −0.012 | −0.103 | 0.075 | |
| 10~12 | −0.005 | 0.045 | −0.019 | −0.002 | |
| 12~14 | 0.020 | 0.122 | −0.053 | 0.016 | |
| 14~16 | 0.058 | 0.146 | −0.040 | 0.053 | |
| - | −0.193 | 0.108 | −0.257 | −0.052 | |
| - | 0.205 | 0.245 | 0.158 | 0.040 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, L.; Wang, Y.; Qiu, X. Rayleigh-Wave Dispersion Analysis and Inversion Based on the Rotation. Sensors 2022, 22, 983. https://doi.org/10.3390/s22030983
Sun L, Wang Y, Qiu X. Rayleigh-Wave Dispersion Analysis and Inversion Based on the Rotation. Sensors. 2022; 22(3):983. https://doi.org/10.3390/s22030983
Chicago/Turabian StyleSun, Lixia, Yun Wang, and Xinming Qiu. 2022. "Rayleigh-Wave Dispersion Analysis and Inversion Based on the Rotation" Sensors 22, no. 3: 983. https://doi.org/10.3390/s22030983
APA StyleSun, L., Wang, Y., & Qiu, X. (2022). Rayleigh-Wave Dispersion Analysis and Inversion Based on the Rotation. Sensors, 22(3), 983. https://doi.org/10.3390/s22030983