
Vision-Based System for Automated Estimation of the Frontal Area of Swimmers: Towards the Determination of the Instant Active Drag: A Pilot Study

 ,
,  , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Preliminaries
1.2. Related Works
2. Materials and Methods
2.1. Experimental Protocol
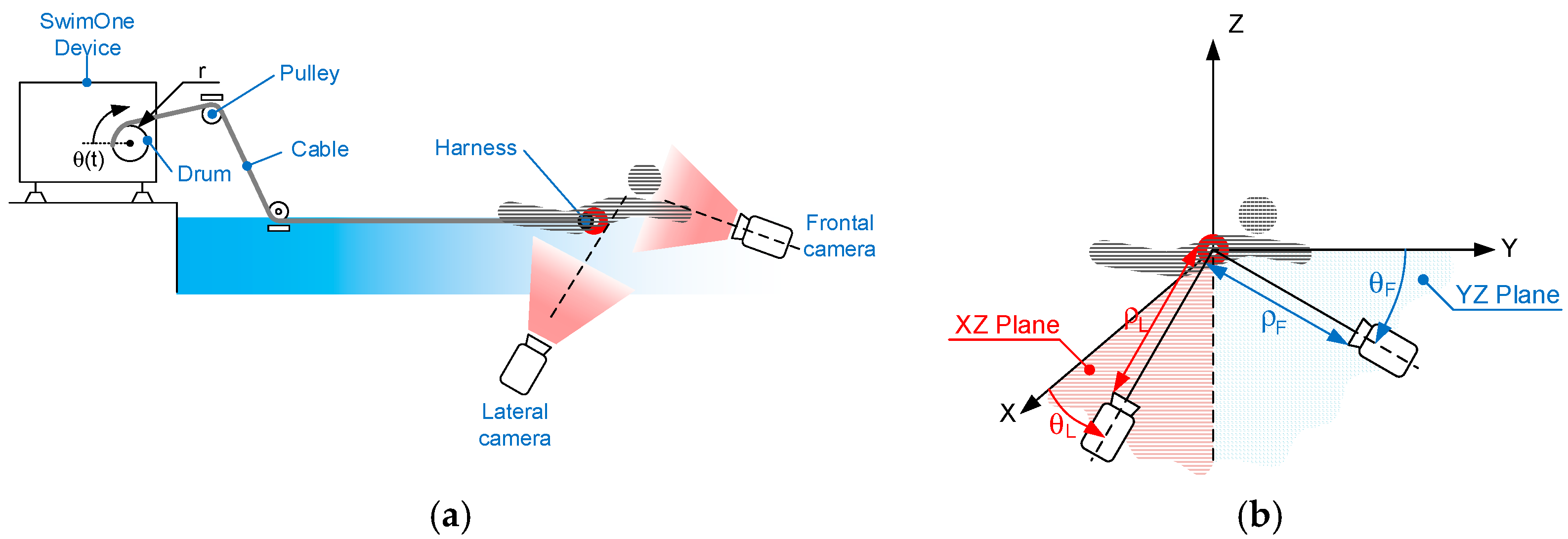
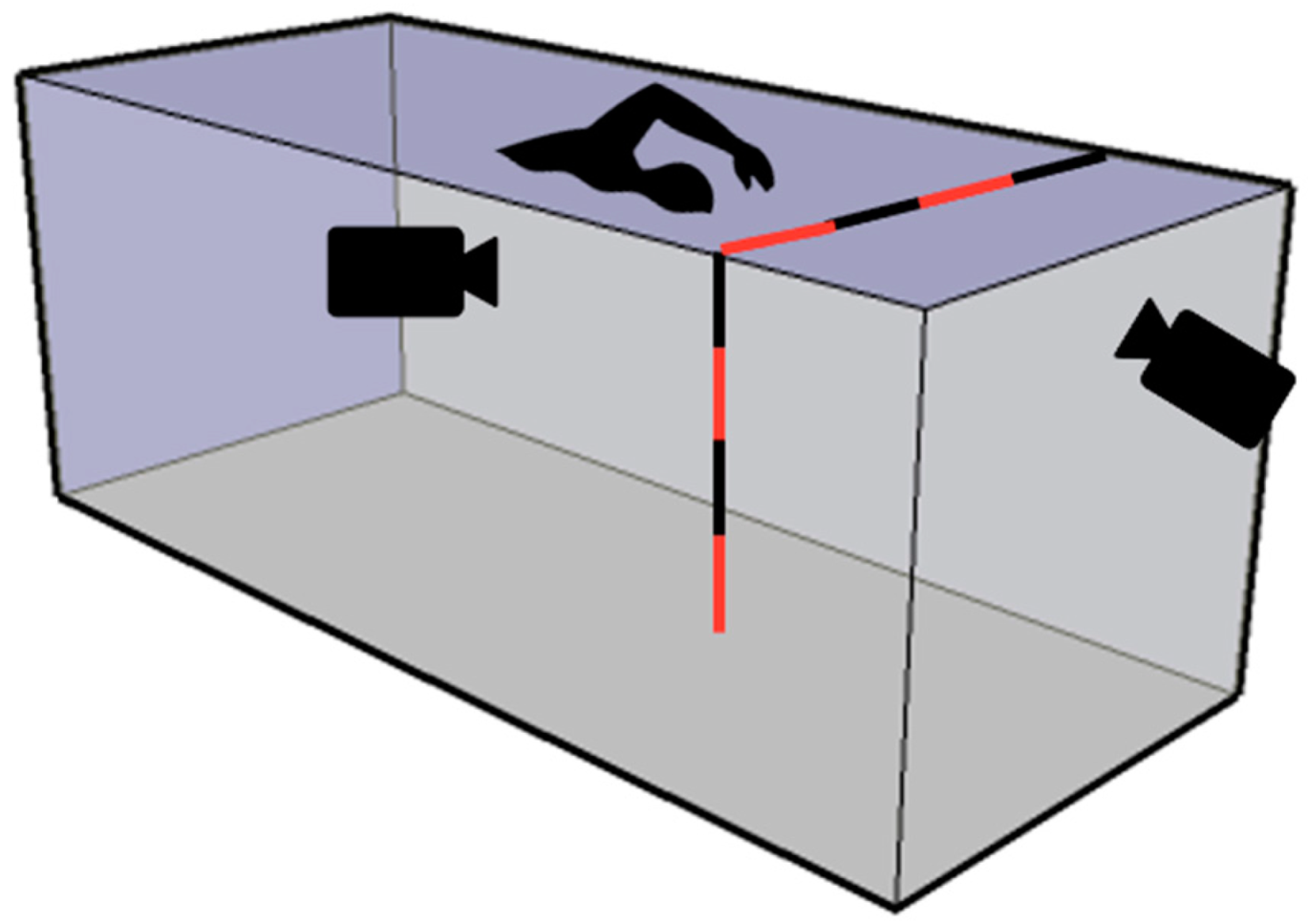
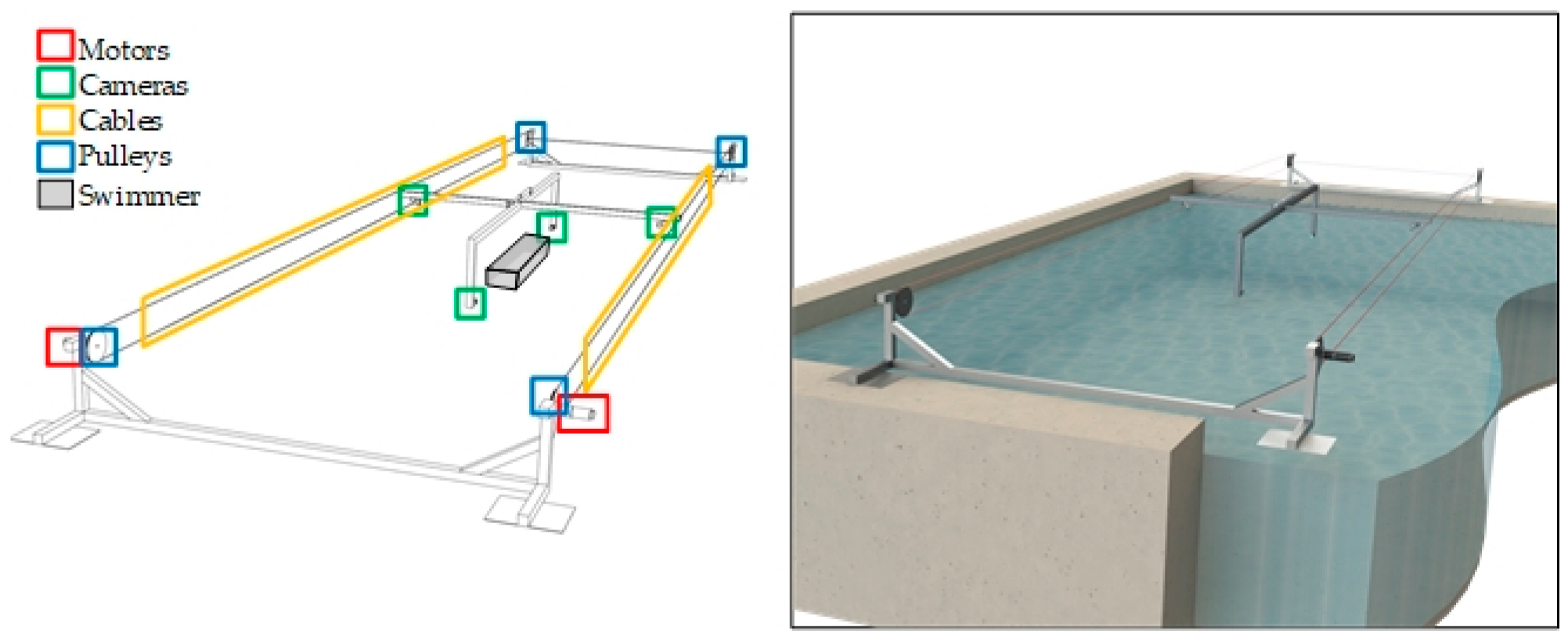
2.2. Hardware Description and Experimental Setting
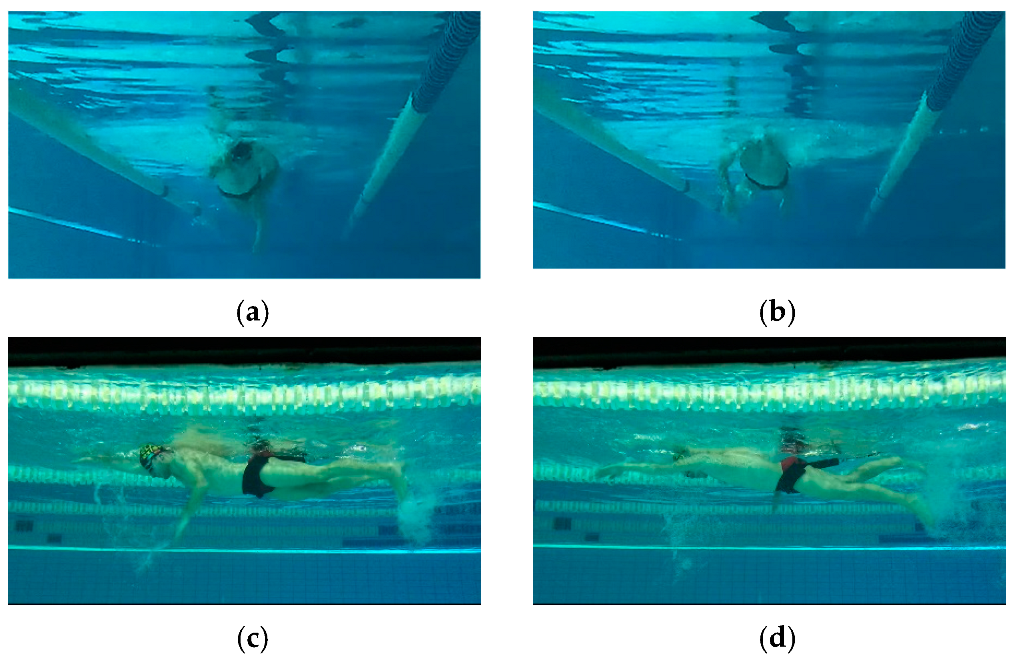
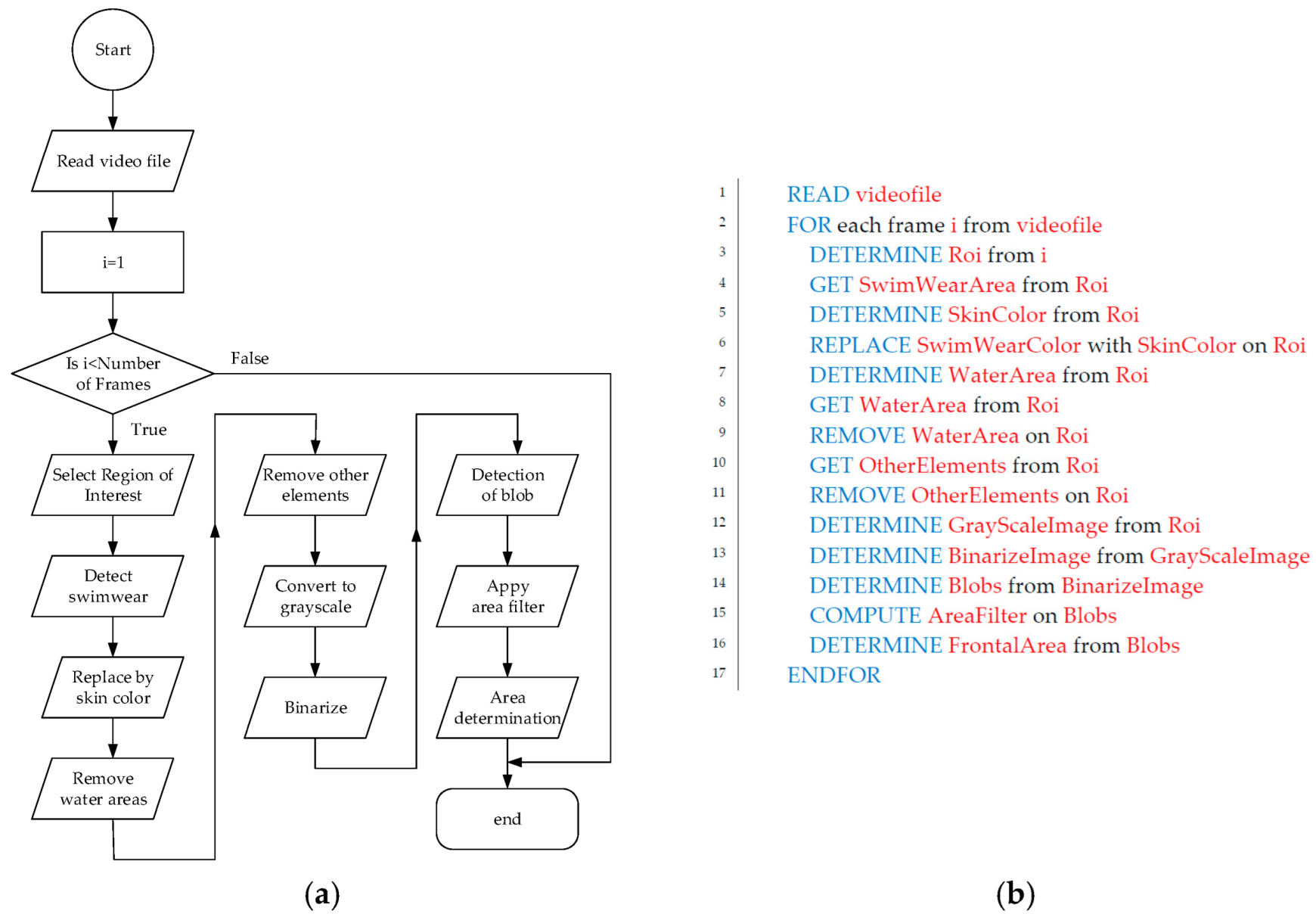
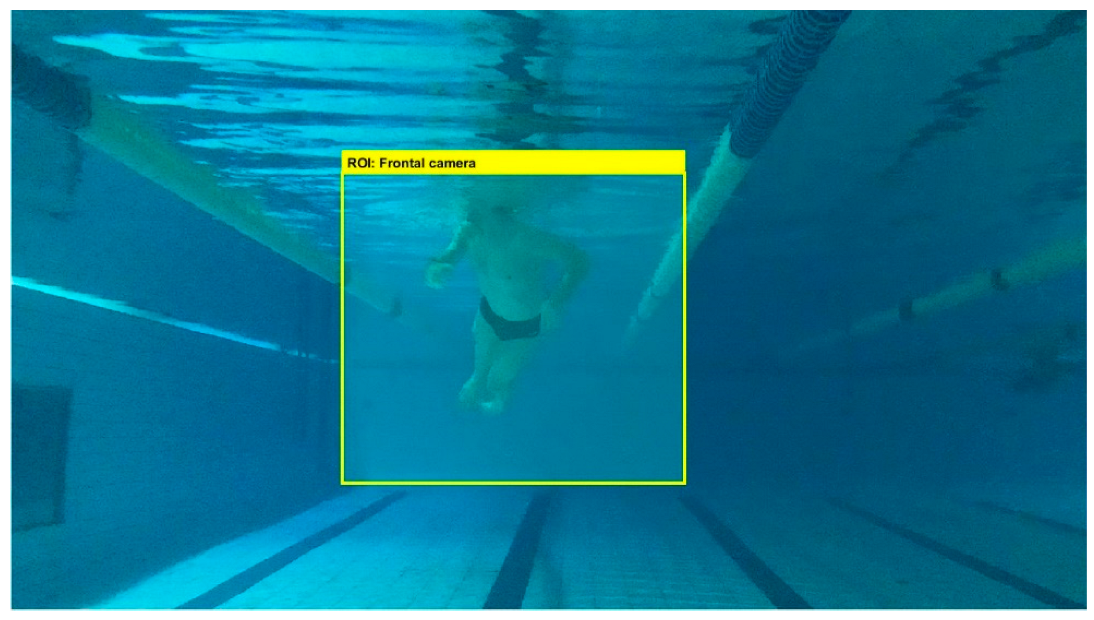
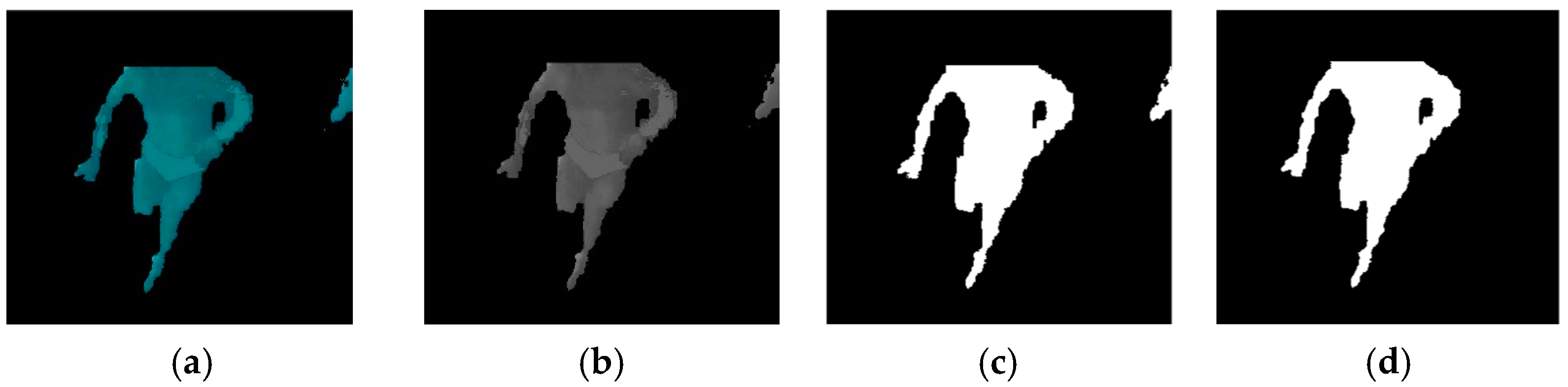
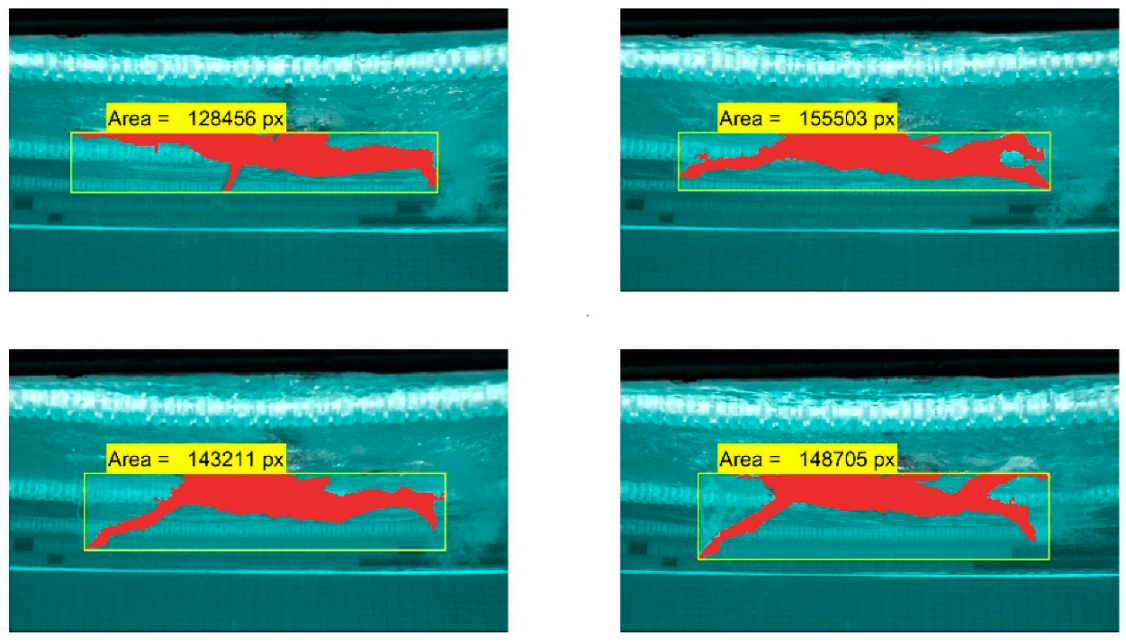
2.3. Frontal Area Detection Algorithm
2.4. Extension to Lateral Area Detection
3. Results
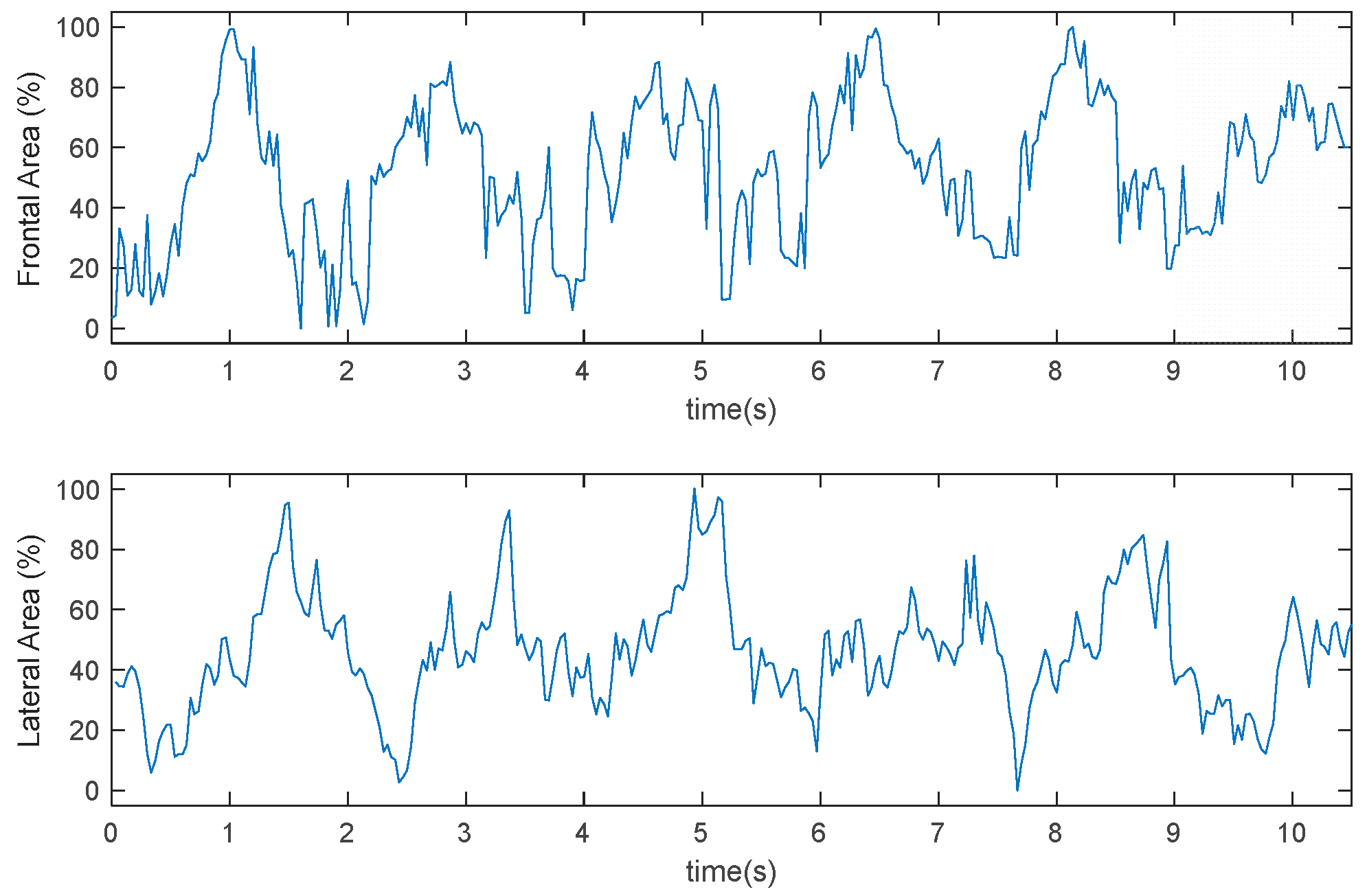
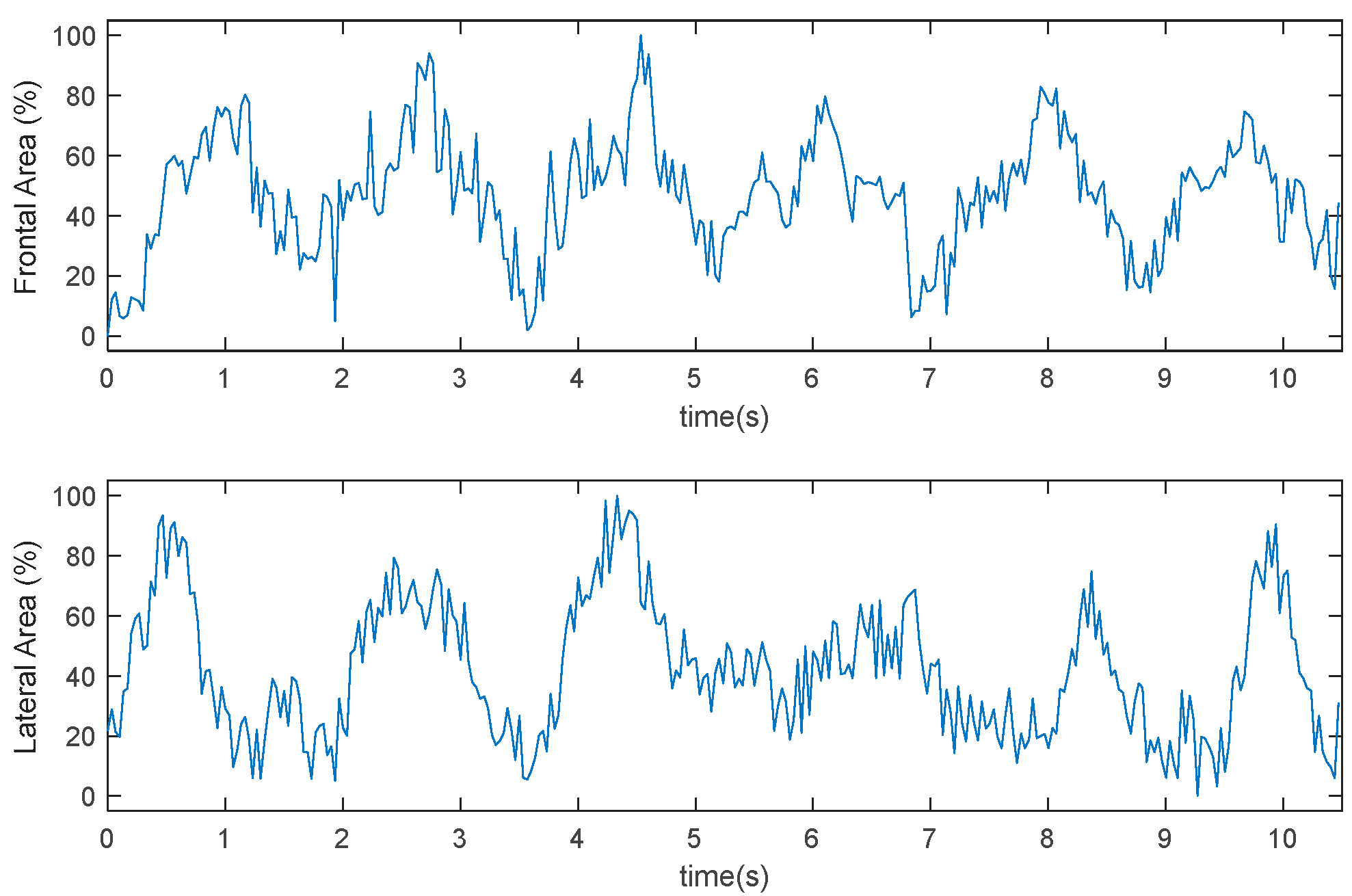
3.1. Frontal and Lateral Area
3.2. Analysis of the Results
3.2.1. Correlation between Frontal and Lateral Areas
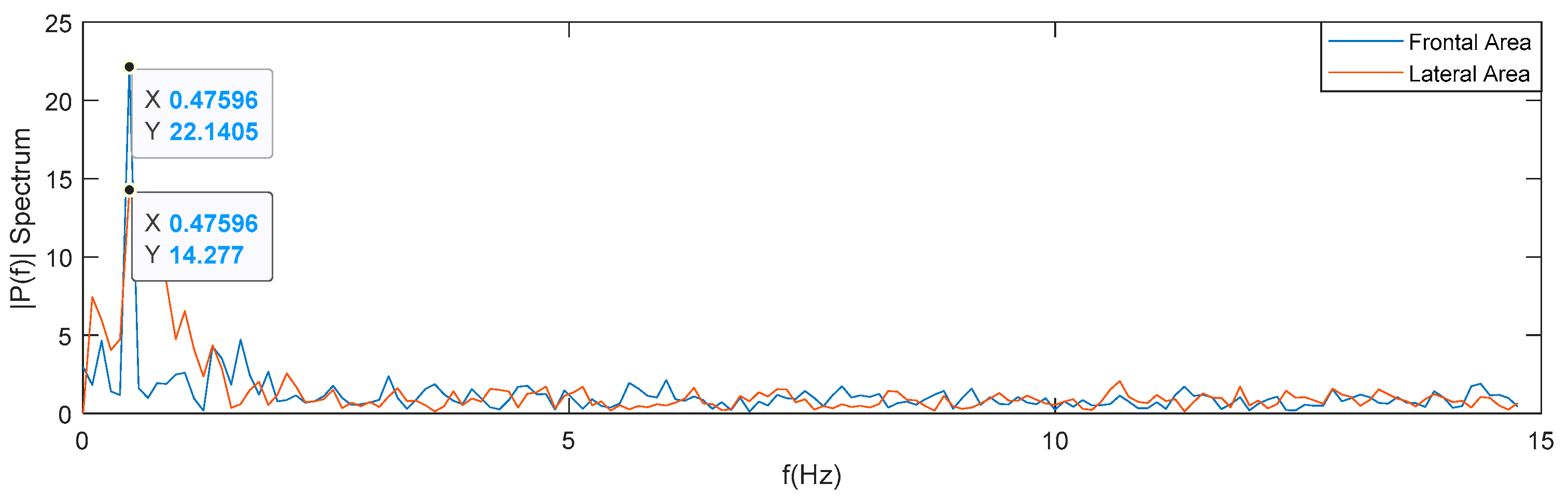
3.2.2. Frequency Domain Characterization
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Pendergast, D.; Mollendorf, J.; Zamparo, P.; Termin, A., 2nd; Bushnell, D.; Paschke, D. The influence of drag on human locomotion in water. Undersea Hyperb. Med. 2005, 32, 45–57. [Google Scholar] [PubMed]
- Toussaint, H.M.; Roos, P.E.; Kolmogorov, S. The determination of drag in front crawl swimming. J. Biomech. 2004, 37, 1655–1663. [Google Scholar] [CrossRef] [PubMed]
- Toussaint, H.; De Groot, G.; Savelberg, H.; Vervoorn, K.; Hollander, A.; van Ingen Schenau, G. Active drag related to velocity in male and female swimmers. J. Biomech. 1988, 21, 435–438. [Google Scholar] [CrossRef]
- Morouço, P.G.; Vilas-Boas, J.P.; Fernandes, R.J. Evaluation of adolescent swimmers through a 30-s tethered test. Pediatr. Exerc. Sci. 2012, 24, 312–321. [Google Scholar] [CrossRef]
- Silva, A.F.; Figueiredo, P.; Ribeiro, J.; Alves, F.; Vilas-Boas, J.P.; Seifert, L.; Fernandes, R.J. Integrated analysis of young swimmers’ sprint performance. Motor Control 2019, 23, 354–364. [Google Scholar] [CrossRef]
- Seifert, L.; Schnitzler, C.; Bideault, G.; Alberty, M.; Chollet, D.; Toussaint, H.M. Relationships between coordination, active drag and propelling efficiency in crawl. Hum. Mov. Sci. 2015, 39, 55–64. [Google Scholar] [CrossRef]
- Kudo, S.; Mastuda, Y.; Yanai, T.; Sakurai, Y.; Ikuta, Y. Contribution of upper trunk rotation to hand forward-backward movement and propulsion in front crawl strokes. Hum. Mov. Sci. 2019, 66, 467–476. [Google Scholar] [CrossRef]
- Kudo, S.; Sakurai, Y.; Miwa, T.; Matsuda, Y. Relationship between shoulder roll and hand propulsion in the front crawl stroke. J. Sports Sci. 2017, 35, 945–952. [Google Scholar] [CrossRef]
- Tsunokawa, T.; Nakashima, M.; Takagi, H. Use of pressure distribution analysis to estimate fluid forces around a foot during breaststroke kicking. Sports Eng. 2015, 18, 149–156. [Google Scholar] [CrossRef]
- Schnitzler, C.; Seifert, L.; Button, C. Adaptability in swimming pattern: How propulsive action is modified as a function of speed and skill. Front. Sports Act. Living 2021, 3, 56. [Google Scholar] [CrossRef]
- Hollander, A.; De Groot, G.; van Ingen Schenau, G.; Toussaint, H.; De Best, H.; Peeters, W.; Meulemans, A.; Schreurs, A. Measurement of active drag during crawl arm stroke swimming. J. Sports Sci. 1986, 4, 21–30. [Google Scholar] [CrossRef] [PubMed]
- Kolmogorov, S.; Duplishcheva, O. Active drag, useful mechanical power output and hydrodynamic force coefficient in different swimming strokes at maximal velocity. J. Biomech. 1992, 25, 311–318. [Google Scholar] [CrossRef]
- Formosa, D.P.; Toussaint, H.M.; Mason, B.R.; Burkett, B. Comparative analysis of active drag using the MAD system and an assisted towing method in front crawl swimming. J. Appl. Biomech. 2012, 28, 746–750. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hazrati, P.; Sinclair, P.J.; Spratford, W.; Ferdinands, R.E.; Mason, B.R. Contribution of uncertainty in estimation of active drag using assisted towing method in front crawl swimming. J. Sports Sci. 2018, 36, 7–13. [Google Scholar] [CrossRef]
- Narita, K.; Nakashima, M.; Takagi, H. Developing a methodology for estimating the drag in front-crawl swimming at various velocities. J. Biomech. 2017, 54, 123–128. [Google Scholar] [CrossRef] [Green Version]
- Takagi, H.; Nakashima, M.; Sengoku, Y.; Tsunokawa, T.; Koga, D.; Narita, K.; Kudo, S.; Sanders, R.; Gonjo, T. How do swimmers control their front crawl swimming velocity? Current knowledge and gaps from hydrodynamic perspectives. Sports Biomech. 2021, 1–20. [Google Scholar] [CrossRef]
- Morais, J.E.; Sanders, R.H.; Papic, C.; Barbosa, T.M.; Marinho, D.A. The influence of the frontal surface area and swim velocity variation in front crawl active drag. Med. Sci. Sports Exerc. 2020, 52, 2357–2364. [Google Scholar] [CrossRef]
- Gatta, G.; Cortesi, M.; Fantozzi, S.; Zamparo, P. Planimetric frontal area in the four swimming strokes: Implications for drag, energetics and speed. Hum. Mov. Sci. 2015, 39, 41–54. [Google Scholar] [CrossRef]
- Payton, C.J. Motion analysis using video. In Biomechanical Evaluation of Movement in Sport and Exercise; Routledge: Abingdon, UK, 2007; pp. 22–46. [Google Scholar]
- Hermosilla, F.; Corral-Gómez, L.; González-Ravé, J.M.; Juárez Santos-García, D.; Rodríguez-Rosa, D.; Juárez-Pérez, S.; Castillo-Garcia, F.J. SwimOne. New Device for Determining Instantaneous Power and Propulsive Forces in Swimming. Sensors 2020, 20, 7169. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, K. Region-of-interest extraction based on frequency domain analysis and salient region detection for remote sensing image. IEEE Geosci. Remote Sens. Lett. 2013, 11, 916–920. [Google Scholar] [CrossRef]
- Kulkarni, N. Color thresholding method for image segmentation of natural images. Int. J. Image. Graph. 2012, 4, 28. [Google Scholar] [CrossRef] [Green Version]
- Weatherall, I.L.; Coombs, B.D. Skin color measurements in terms of CIELAB color space values. J. Investig. Dermatol. 1992, 99, 468–473. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Billmeyer Jr, F.W.; Fairman, H.S. CIE method for calculating tristimulus values. Color. Res. Appl. 1987, 12, 27–36. [Google Scholar] [CrossRef]
- Bradley, D.; Roth, G. Adaptive thresholding using the integral image. J. Graph. Tools 2007, 12, 13–21. [Google Scholar] [CrossRef]
- Ananthanarasimhan, J.; Leelesh, P.; Anand, M.; Lakshminarayana, R. Validation of projected length of the rotating gliding arc plasma using ‘regionprops’ function. Plasma Res. Express 2020, 2, 035008. [Google Scholar] [CrossRef]
- Song, L.; Wu, W.; Guo, J.; Li, X. Survey on camera calibration technique. In Proceedings of the 2013 5th International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2013; pp. 389–392. [Google Scholar]
- Sacilotto, G.B.; Ball, N.; Mason, B.R. A biomechanical review of the techniques used to estimate or measure resistive forces in swimming. J. Appl. Biomech. 2014, 30, 119–127. [Google Scholar] [CrossRef]
- Cortesi, M.; Gatta, G.; Michielon, G.; Di Michele, R.; Bartolomei, S.; Scurati, R. Passive drag in young swimmers: Effects of body composition, morphology and gliding position. Int. J. Environ. Res. Public Health 2020, 17, 2002. [Google Scholar] [CrossRef] [Green Version]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
González-Ravé, J.M.; Moya-Fernández, F.; Hermosilla-Perona, F.; Castillo-García, F.J. Vision-Based System for Automated Estimation of the Frontal Area of Swimmers: Towards the Determination of the Instant Active Drag: A Pilot Study. Sensors 2022, 22, 955. https://doi.org/10.3390/s22030955
González-Ravé JM, Moya-Fernández F, Hermosilla-Perona F, Castillo-García FJ. Vision-Based System for Automated Estimation of the Frontal Area of Swimmers: Towards the Determination of the Instant Active Drag: A Pilot Study. Sensors. 2022; 22(3):955. https://doi.org/10.3390/s22030955
Chicago/Turabian StyleGonzález-Ravé, José M., Francisco Moya-Fernández, Francisco Hermosilla-Perona, and Fernando J. Castillo-García. 2022. "Vision-Based System for Automated Estimation of the Frontal Area of Swimmers: Towards the Determination of the Instant Active Drag: A Pilot Study" Sensors 22, no. 3: 955. https://doi.org/10.3390/s22030955
APA StyleGonzález-Ravé, J. M., Moya-Fernández, F., Hermosilla-Perona, F., & Castillo-García, F. J. (2022). Vision-Based System for Automated Estimation of the Frontal Area of Swimmers: Towards the Determination of the Instant Active Drag: A Pilot Study. Sensors, 22(3), 955. https://doi.org/10.3390/s22030955