
Linear Interval Approximation for Smart Sensors and IoT Devices

 ,
,  , and
, and
Abstract
:1. Introduction
1.1. Resource-Constrained Smart Sensor Devices—Definitions
1.1.1. Smart Sensors
1.1.2. IoT Devices
1.2. Basic Resources of a Typical Smart Sensor/IoT Device and Their Limitations
1.2.1. Limitations Based on Hardware
- (1)
- Energy and computational constraints:
- (2)
- Memory constraints: IoT devices are made with limited RAM and Flash memory compared to conventional digital systems (e.g., desktop computers, laptops, etc.). They usually use mobile lightweight software tools and operating systems. Therefore, calculation schemes require approaches for efficient memory use. However, the traditional computational algorithms are not specifically designed for this purpose and that is why such algorithms cannot be used directly for IoT devices.
1.2.2. Limitations Based on Software
- (1)
- Firmware constraints: The sensor–IoT operating systems that are embedded in the devices have thin stacks of network protocols.
- (2)
- Flexibility: Remote reprogramming may not always be possible for devices, as the operating system may not be able to receive and integrate a new code.
1.3. Sensor Characteristics Linearization
1.3.1. Sensor Transfer Functions
1.3.2. Approaches for Sensor Characteristics Linearization
- analog hardware linearization circuits;
- software-based algorithms for linearization;
- analog–digital mixed approaches [9].
1.3.3. Piecewise Linear Approximation of Sensor Transfer Functions
- a.
- b.
- They require a reduced amount of memory for data storage of the signal from the sensor device and hence possess significant economic potential for realization in smart sensors with reliable, low-cost microcontrollers. This is a crucial issue for two application domains: data mining when huge amounts of sensor data should be preprocessed under the constraint of short system-response times; and acquisition followed by wireless transmission of long-term sensor data.
1.4. Main Error Components of the Smart Sensor/IoT Device
1.5. Proposed Approach
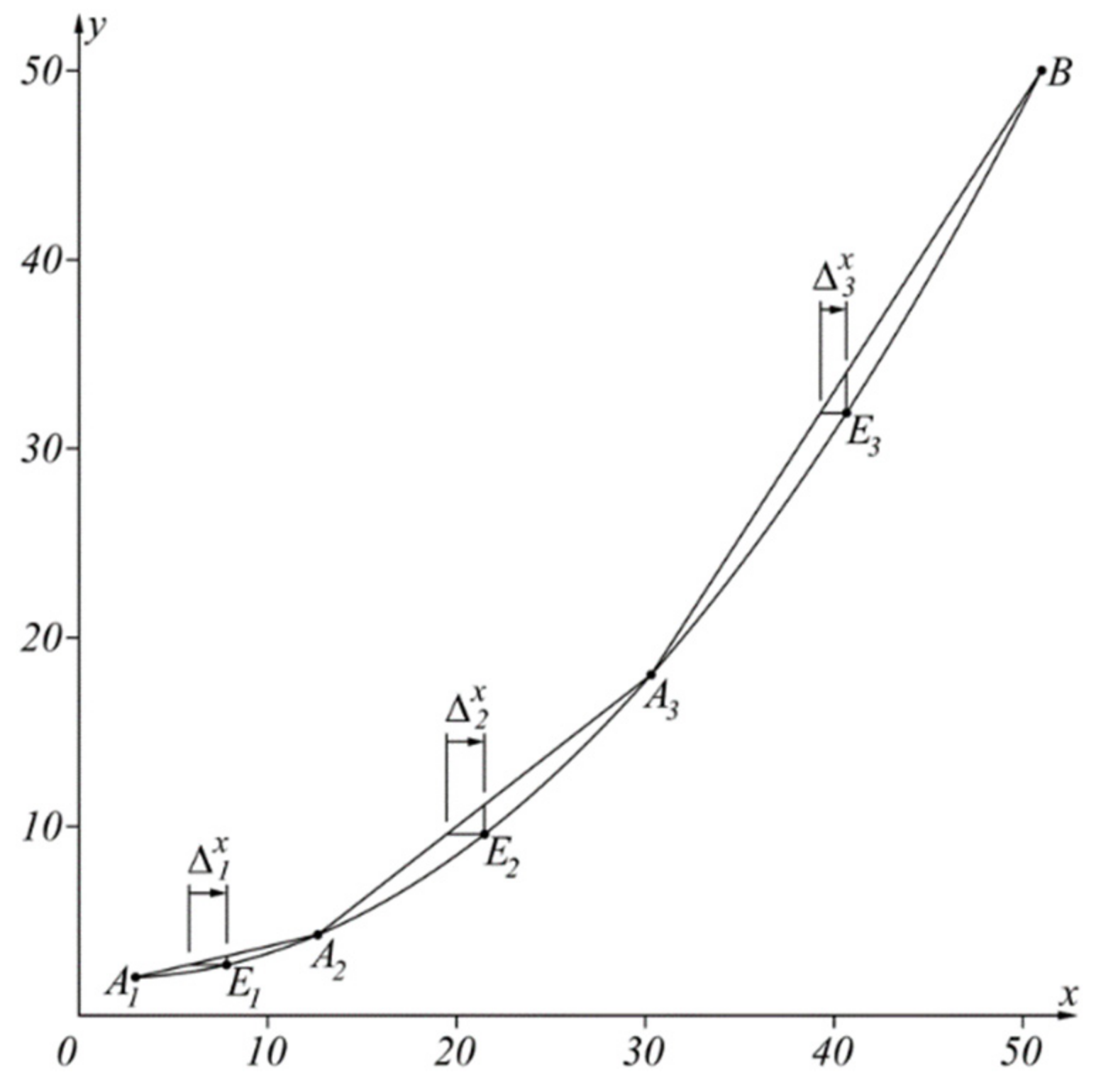
2. The Analytical Framework of the Proposed Approach for Linearization of Sensor Characteristics
3. Essence of the Proposed Approach for Linearization of Sensor Characteristics
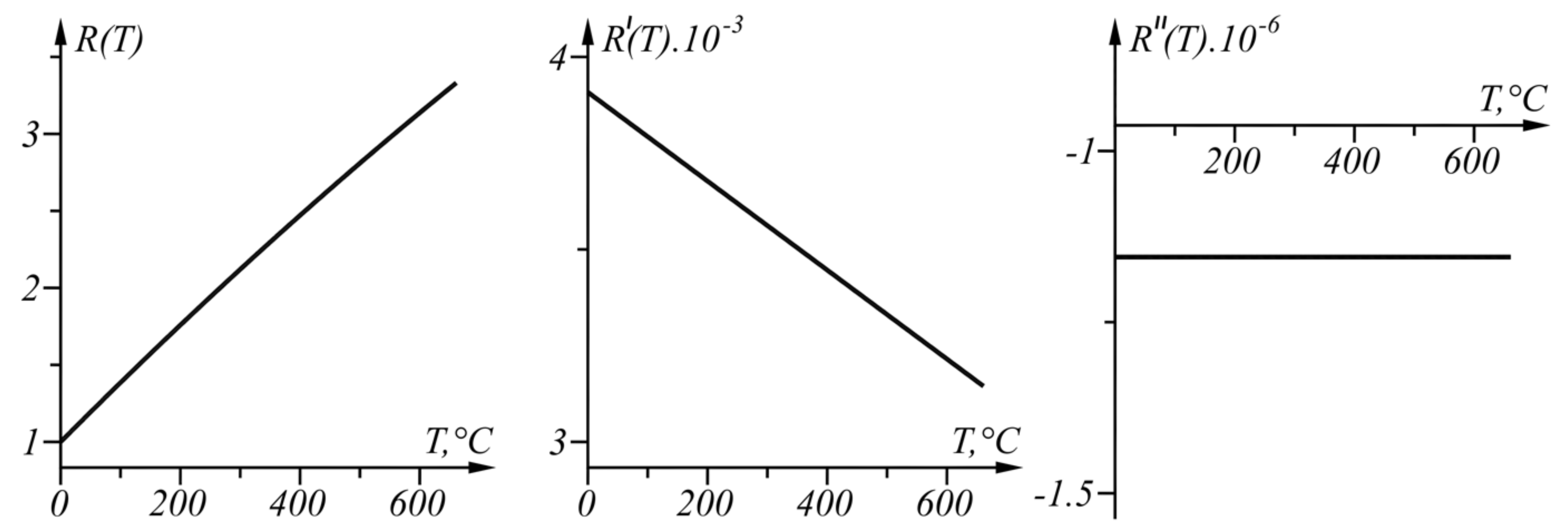
4. Linearization of the Inverse Sensor Characteristics of Temperature Sensors
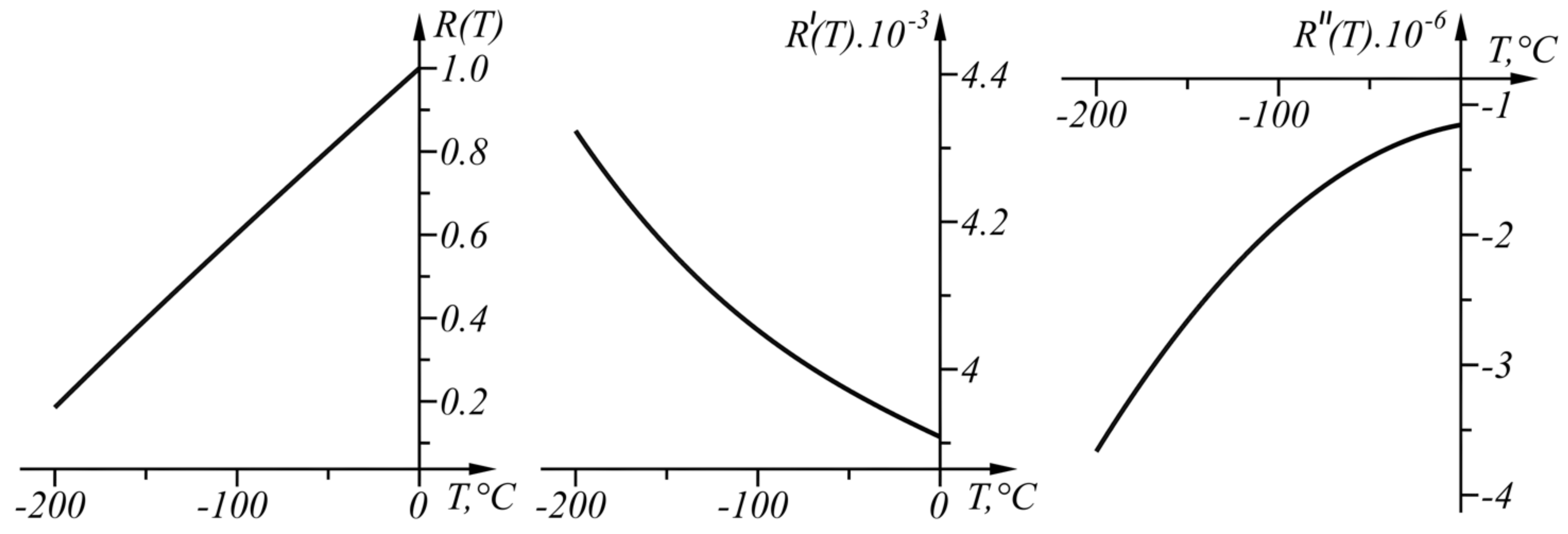
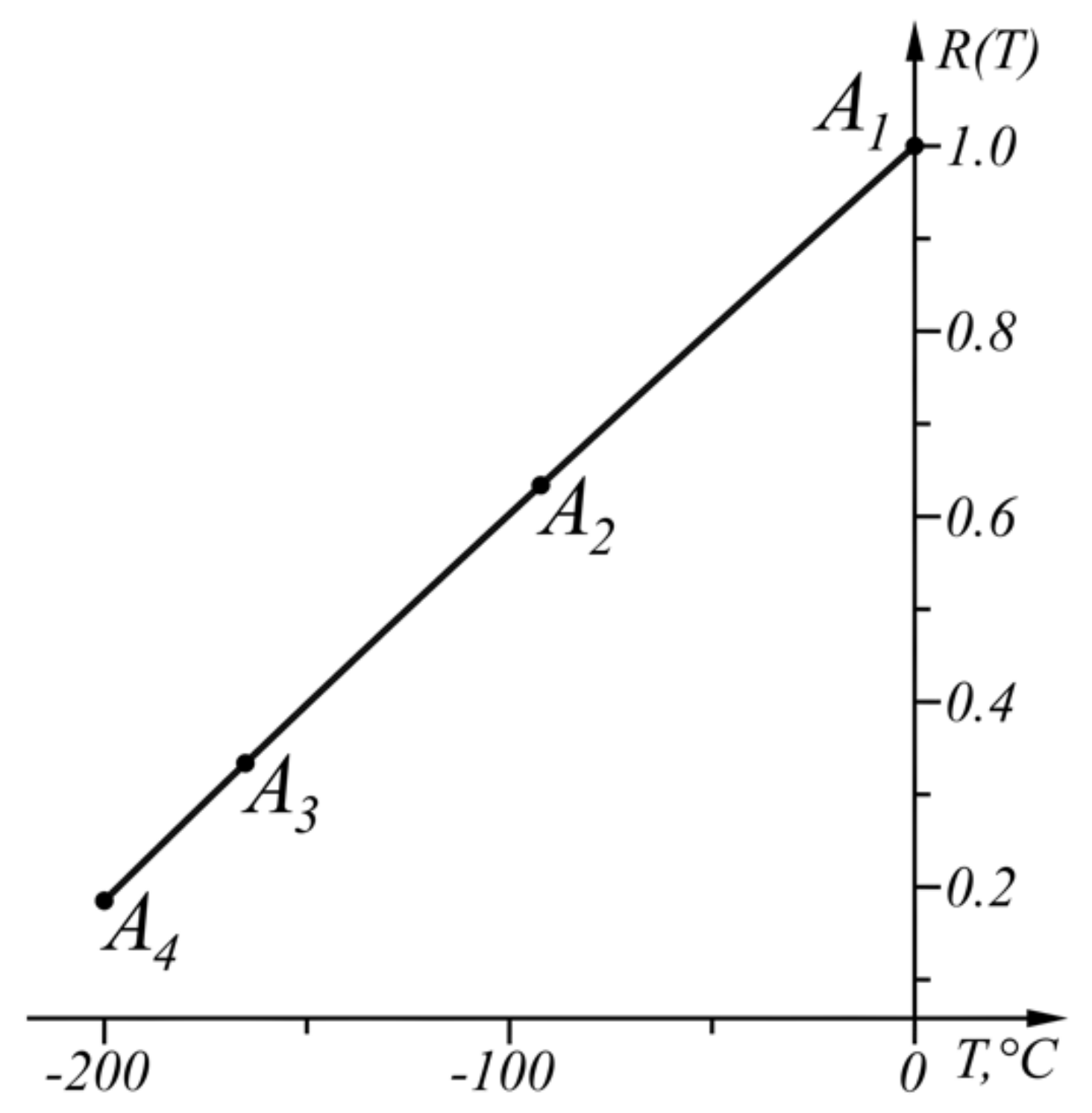
4.1. Linearization of the Inverse Sensor Characteristics of the Platinum Temperature Sensors in the Range
- T, °C—temperature;
- —measured resistance at temperature ;
- —measured resistance at temperature ;
4.2. Linearization of the Inverse Sensor Characteristics of the Platinum Temperature Sensors in the Range
- —temperature;
- —measured resistance at temperature T;
- —measured resistance at temperature T = 0 °C;
- ; ; —coefficients according to ITS 90/IEC 60751 [34].
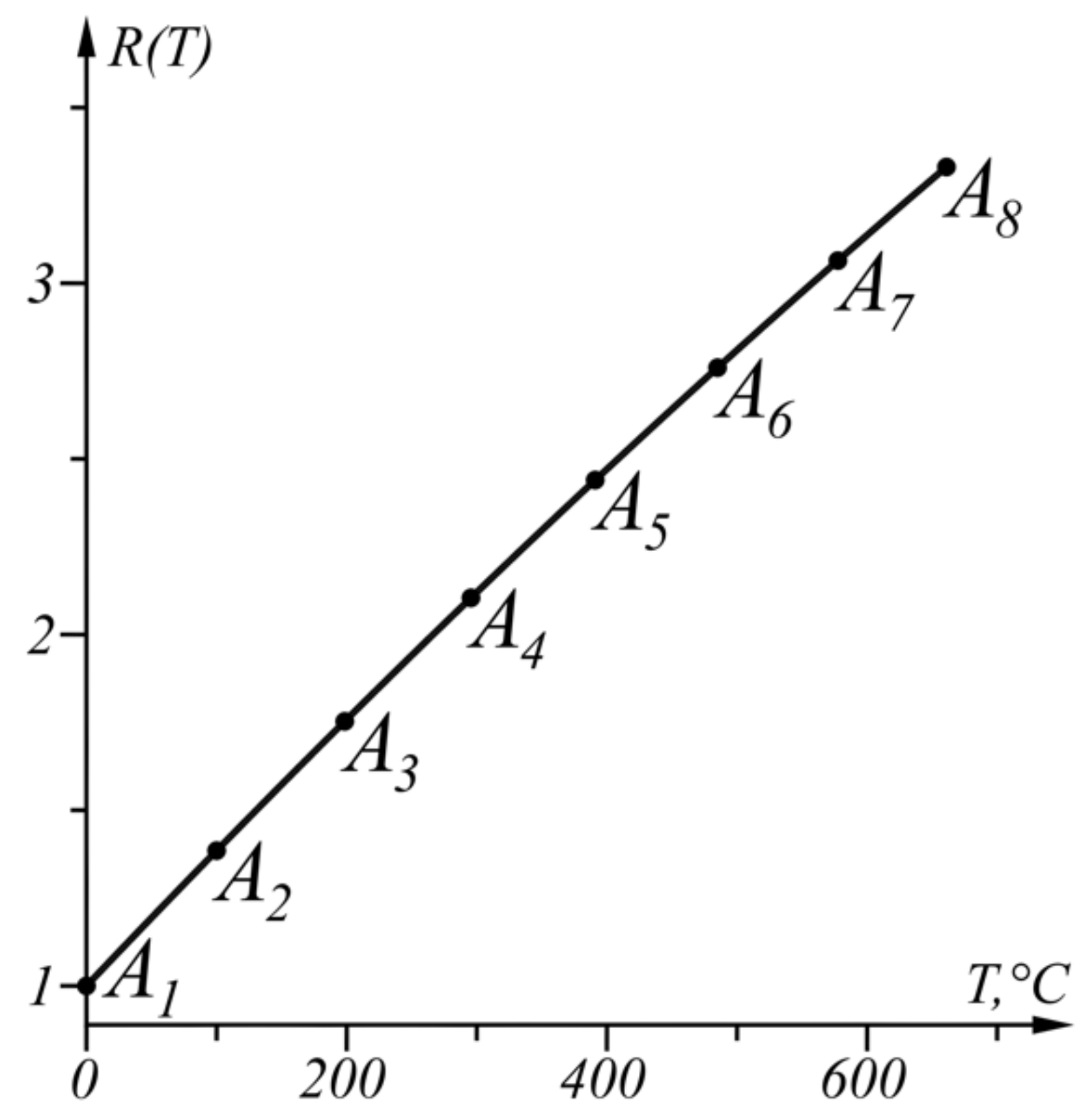
4.3. Microcontroller Implementation of the Inverse Sensor Characteristics Linearization of Platinum Temperature Sensors in the Range
| Algorithm 1 Linearization |
| Input: Measured RTD resistance, R_T, floating-point type Output: Calculated temperature, Temperature, floating-point type |
| Initialization: defining the coordinates of the points bounding each interval Ra_1, Ra_2... Ra_End and Ta_1, Ta_2... Ta_End |
| 1: Determine the interval (n) in which the measured resistance is located, and whether it is in the respective temperature range |
| If ((R_T > Ra_n) and (R_T ≤ Ra_(n + 1))) |
| 2: Calculate the temperature according to the formula |
| Temperature = (R_T − Ra_n) ∗ ((Ta_(n + 1) − Ta_n)/(Ra_(n + 1) − Ra_n)) + Ta_n; |
| 3: Return Temperature |
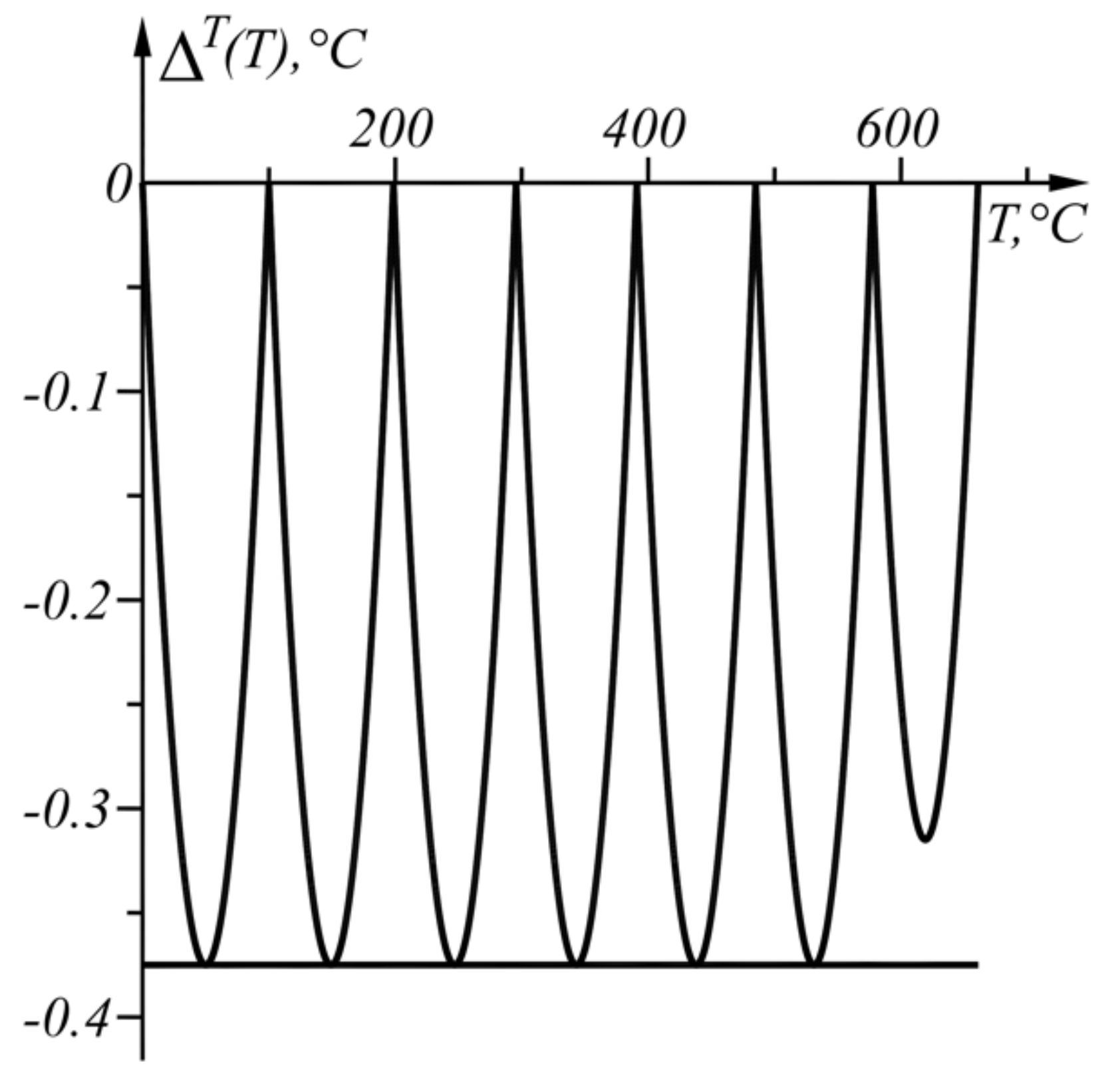
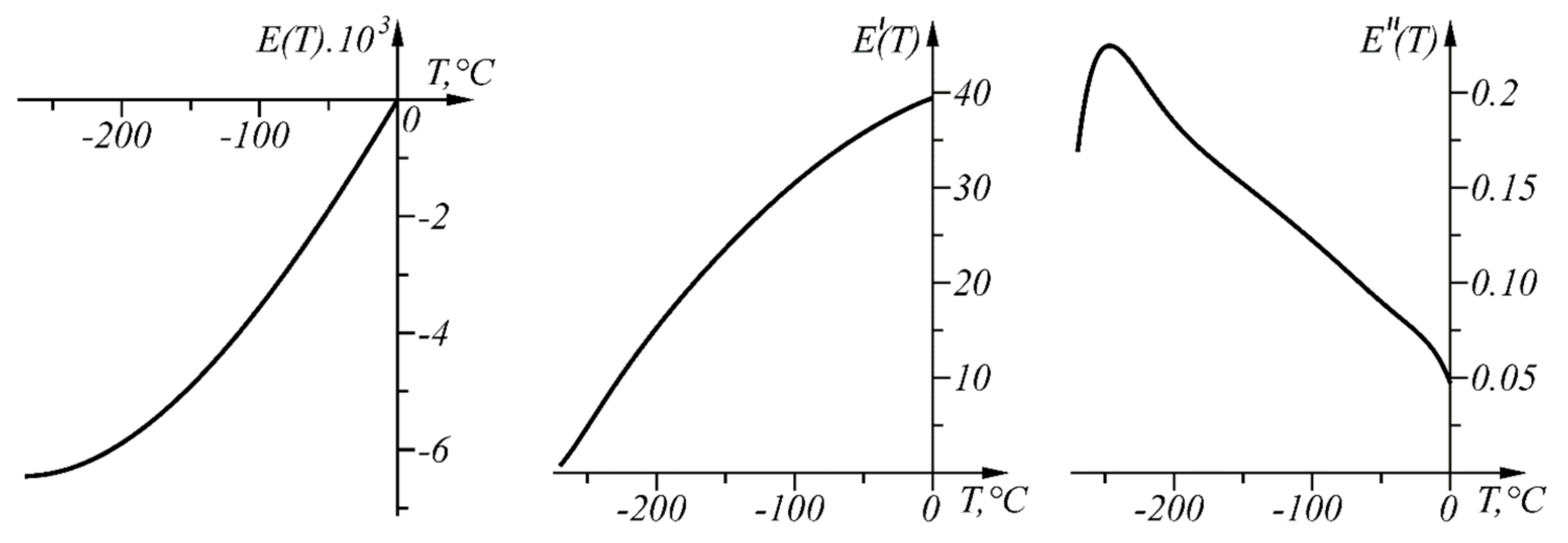
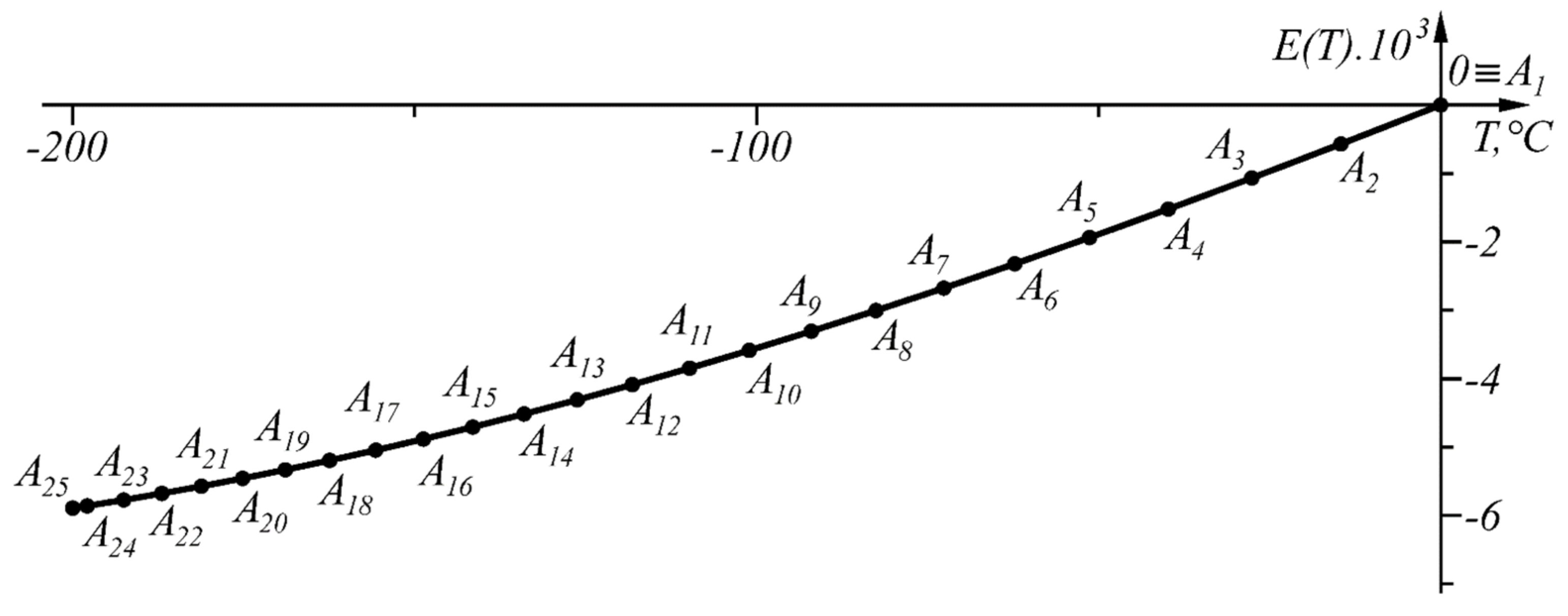
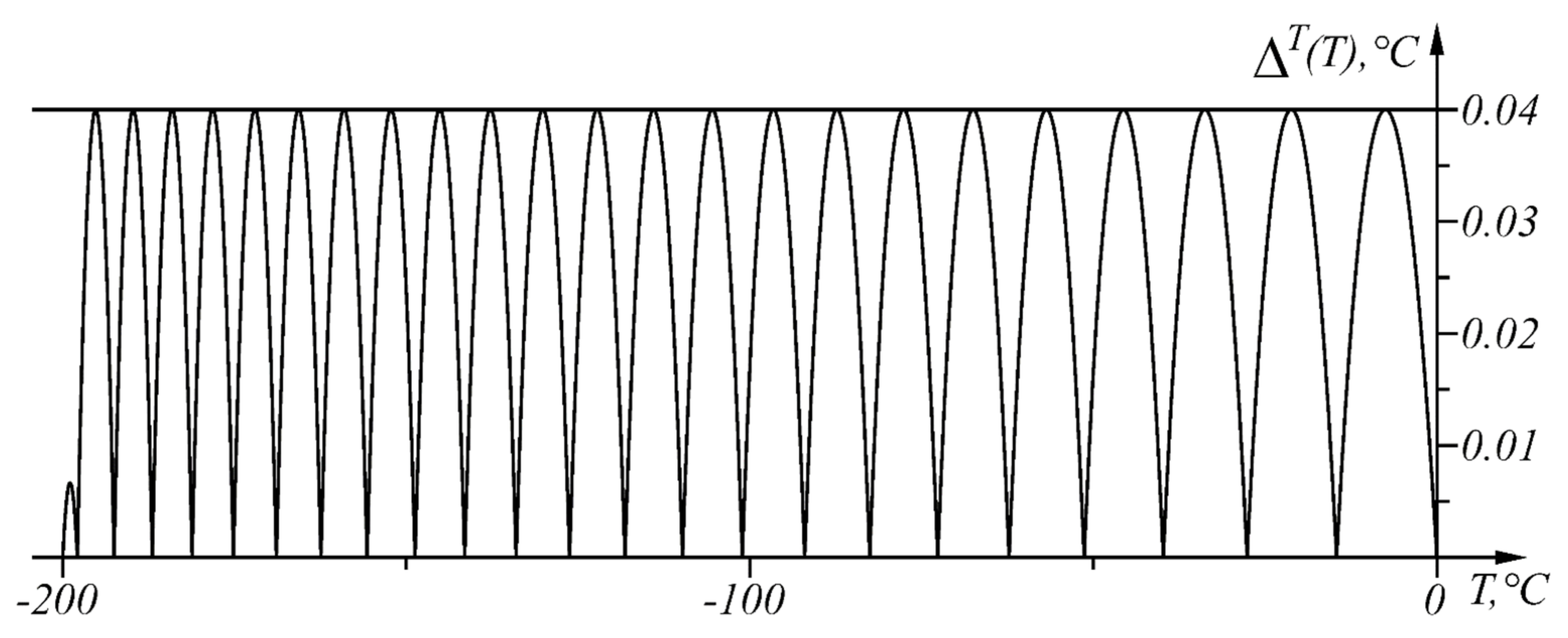
4.4. An Illustrative Example of Linearization of the Inverse Sensor Characteristics of K-Type Thermocouples in the Temperature Range and Maximum Approximation Error
5. Conclusions
- the approach is applied at intervals, with each subsequent step (each successive interval) resulting in a similar solution of the problem under the new initial conditions to obtain the directly sought solution, which in turn contains the initial conditions for the next step;
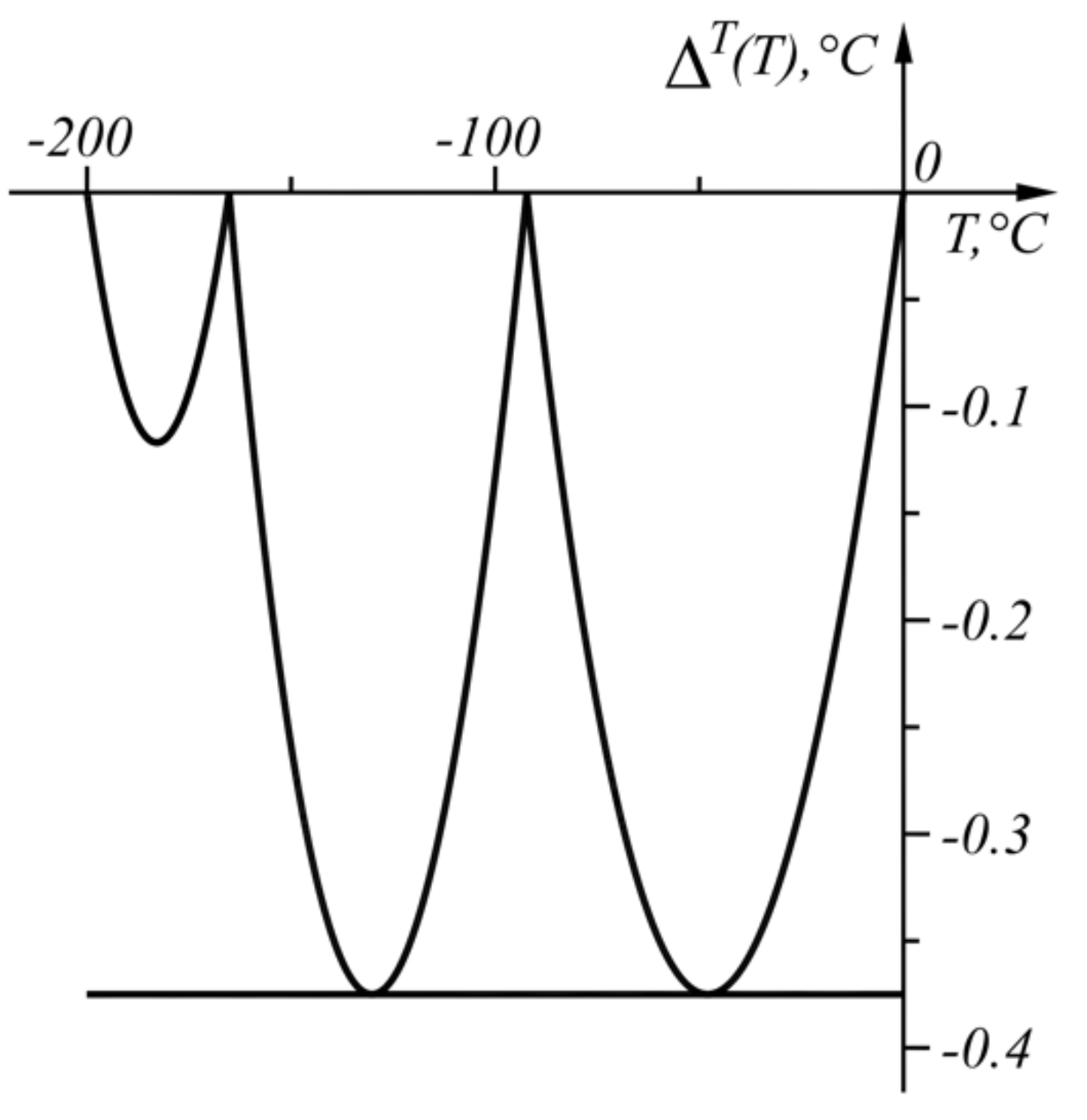
- the maximum error under linearization of the inverse sensor characteristic at all intervals, except in the general case of the last one, is the same;
- the approach allows that different maximum approximation errors are set at each subsequent interval;
- the approach allows the application to general types of differentiable sensor characteristics with piecewise concave/convex properties.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, X.; Baiocchi, O. A comparison of the definitions for smart sensors, smart objects, and Things in IoT. In Proceedings of the IEEE 7th Annual Information Technology Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 13–15 October 2016. [Google Scholar]
- NIST. Definitions—Sensors, National Institute of Standards and Technology. 2009. Available online: http://www.nist.gov/el/isd/ieee/definitions.cfm (accessed on 13 January 2022).
- IEEE. The IEEE 1451.4 Standard for Smart Transducers. 2004. Available online: https://standards.ieee.org/content/dam/ieee-standards/standards/web/documents/tutorials/1451d4.pdf (accessed on 12 October 2021).
- Oriwoh, E.; Conrad, M. Things’ in the Internet of Things: Towards a definition. Int. J. Internet Things 2015, 4, 1–5. [Google Scholar]
- Hossain, M.M.; Fotouhi, M.; Hasan, R. Towards an Analysis of Security Issues, Challenges, and Open Problems in the Internet of Things; IEEE: New York, NY, USA, 2015. [Google Scholar]
- Zahoor, S.; Mir, R. Resource management in pervasive Internet of Things: A survey. J. King Saud Univ.–Comput. Inf. Sci. 2018, 33, 921–935. [Google Scholar] [CrossRef]
- Fraden, J. Handbook of Modern Sensors; Springer: Cham, Switzerland; Heidelberg, Germany; New York, NY, USA; Dordrecht, The Netherlands; London, UK, 2016. [Google Scholar]
- Attari, M. Methods for linearization of non-linear sensors. In Proceedings of the CMMNI-4, Fourth Maghrebin Conference on Numerical Methods of Engineering, Algiers, Algeria; 1993; Volume 1, pp. 344–350. [Google Scholar]
- Erdem, H. Implementation of software-based sensor linearization algorithms on low-cost microcontrollers. ISA Trans. 2010, 49, 552–558. [Google Scholar] [CrossRef] [PubMed]
- Johnson, C. Process Control Instrumentation Technology, 8th ed.; Pearson Education Limited: London, UK, 2013. [Google Scholar]
- Marinov, M.; Dimitrov, S.; Djamiykov, T.; Dontscheva, M. An Adaptive Approach for Linearization of Temperature Sensor Characteristics. In Proceedings of the 27th International Spring Seminar on Electronics Technology, ISSE 2004, Bankya, Bulgaria, 13–16 May 2004. [Google Scholar]
- Brignell, J. Software techniques for sensor compensation. Sens. Actuators A Phys. 1990, 25, 29–35. [Google Scholar] [CrossRef]
- Flammini, A.; Marioli, D.; Taroni, A. Transducer output signal processing using an optimal look-up table in mi-crocontroller-based systems. Electron. Lett. 2010, 33, 552–558. [Google Scholar]
- Grützmacher, F.; Beichler, B.; Hein, A.; Kirste, T.; Haubelt, C. Time and Memory Efficient Online Piecewise Linear Approximation of Sensor Signals. Sensors 2018, 18, 1672. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Islam, T.; Mukhopadhyay, S. Linearization of the sensors characteristics: A review. Int. J. Smart Sens. Intell. Syst. 2019, 12, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Keogh, E.; Chu, S.; Hart, D.; Pazzani, M. An online algorithm for segmenting time series. In Proceedings of the IEEE International Conference on Data Mining, ICDM2001, San Jose, CA, USA, 29 November–2 December 2001. [Google Scholar]
- Liu, C.; Wu, K.; Pei, J. An energy-efficient data collection framework for wireless sensor networks by exploiting spatiotemporal correlation. IEEE Trans. Parallel Distrib. Syst. 2007, 18, 1010–1023. [Google Scholar] [CrossRef] [Green Version]
- Pham, N.; Le, T.; Choo, H. Enhance exploring temporal correlation for data collection in WSNs. In Proceedings of the IEEE International Conference on Research, Innovation and Vision for the Future, RIVF 2008, Ho Chi Minh City, Vietnam, 13–17 July 2008. [Google Scholar]
- Van Laerhoven, K.; Berlin, E.; Schiele, B. Enabling efficient time series analysis for wearable activity data. In Proceedings of the International Conference on Machine Learning and Applications, ICMLA’09, Miami Beach, FL, USA, 13–15 December 2009. [Google Scholar]
- Berlin, E.; van Laerhoven, K. An on-line piecewise linear approximation technique for wireless sensor networks. In Proceedings of the 2010 IEEE 35th Conference on Local Computer Networks (LCN), Denver, CO, USA, 11–14 October 2010. [Google Scholar]
- Berlin, E.; van Laerhoven, K. Detecting leisure activities with dense motif discovery. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012. [Google Scholar]
- Lemire, D. A better alternative to piecewise linear time-series segmentation. In Proceedings of the 2007 SIAM International Conference on Data Mining, Minneapolis, MN, USA, 26–28 April 2007. [Google Scholar]
- Fuchs, E.; Gruber, T.; Nitschke, J.; Sick, B. Online segmentation of time series based on polynomial least-squares approximations. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 2232–2245. [Google Scholar] [CrossRef] [PubMed]
- Luo, G.; Yi, K.; Cheng, S.; Li, Z.; Fan, W.; He, C.; Mu, Y. Piecewise linear approximation of streaming time-series data with max-error guarantees. In Proceedings of the 2015 IEEE 31st International Conference on Data Engineering (ICDE), Seoul, Korea, 13–17 April 2015. [Google Scholar]
- Junker, H.; Amft, O.; Lukowicz, P.; Tröster, G. Gesture spotting with body-worn inertial sensors to detect user activities. Pattern Recognit. 2008, 41, 2010–2024. [Google Scholar] [CrossRef]
- Chevrier, M. TI Designs. Optimized Sensor Linearization for Thermocouple; TIDUA11A; Texas Instruments Incorporated: Dallas, TX, USA, June 2015; Revised September 2015. [Google Scholar]
- van der Horn, G.; Huijsing, J. Integrated Smart Sensors: Design and Calibration; Springer: New York, NY, USA, 2012. [Google Scholar]
- Pereira, J.M.D.; Postolache, O.; Girao, P.M.B.S. PDF-Based Progressive Polynomial Calibration Method for Smart Sensors Linearization. IEEE Trans. Instrum. Meas. 2009, 58, 3245–3252. [Google Scholar] [CrossRef] [Green Version]
- Kincaid, D.; Kincaid, D.; Cheney, E. Numerical Analysis: Mathematics of Scientific Computing; American Mathematical Society: Washington, DC, USA, 2009. [Google Scholar]
- Šturcel, J.; Kamenský, M. Function approximation and digital linearization in sensor systems. ATP J. 2006, 2, 13–17. [Google Scholar]
- Marsden, J.; Weinstein, A. Calculus I; Springer: New York, NY, USA, 2012. [Google Scholar]
- Fluke. How to Calibrate an RTD or Platinum Resistance Thermometer (PRT) AN; Fluke Corporation, Hart Scientific Division: American Fork, UT, USA, 2009. [Google Scholar]
- Cejer, M. Resistive Temperature Detectors: An Alternative to Thermocouples for Precise, Repeatable Temperature Measurements; Keithley Instruments, Inc.: Cleveland, OH, USA, 2004. [Google Scholar]
- Yang, I.; Gam, K.; Joung, W. Modeling the calibration of the industrial platinum-resistance thermometers according to GUM. Accredit. Qual. Assur. 2013, 18, 359–362. [Google Scholar] [CrossRef]
- Fernicola, V.C.; Iacomini, L. Approximating the ITS-90 Temperature Scale with Industrial Platinum Resistance Thermometers. Int. J. Thermophys. 2008, 29, 1817–1827. [Google Scholar] [CrossRef]
- Nabto. ESP32 for IoT: A Complete Guide. 2020. Available online: https://www.nabto.com/guide-to-iot-esp-32/ (accessed on 13 January 2022).
- Haney. Library for Accurate Pt100 RTD Ohms-to-Celsius Conversion. 2018. Available online: https://github.com/drhaney/pt100rtd/tree/master/examples/pt100_temperature (accessed on 13 January 2022).
- Candela, G. TI Designs. Isolated Loop Powered Thermocouple Transmitter; TIDU449B; Texas Instruments Incorporated: Dallas, TX, USA, October 2014; Revised July 2016. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marinov, M.B.; Nikolov, N.; Dimitrov, S.; Todorov, T.; Stoyanova, Y.; Nikolov, G.T. Linear Interval Approximation for Smart Sensors and IoT Devices. Sensors 2022, 22, 949. https://doi.org/10.3390/s22030949
Marinov MB, Nikolov N, Dimitrov S, Todorov T, Stoyanova Y, Nikolov GT. Linear Interval Approximation for Smart Sensors and IoT Devices. Sensors. 2022; 22(3):949. https://doi.org/10.3390/s22030949
Chicago/Turabian StyleMarinov, Marin B., Nikolay Nikolov, Slav Dimitrov, Todor Todorov, Yana Stoyanova, and Georgi T. Nikolov. 2022. "Linear Interval Approximation for Smart Sensors and IoT Devices" Sensors 22, no. 3: 949. https://doi.org/10.3390/s22030949
APA StyleMarinov, M. B., Nikolov, N., Dimitrov, S., Todorov, T., Stoyanova, Y., & Nikolov, G. T. (2022). Linear Interval Approximation for Smart Sensors and IoT Devices. Sensors, 22(3), 949. https://doi.org/10.3390/s22030949