
A Systematic Review of Research on Robot-Assisted Therapy for Children with Autism


Abstract
:1. Introduction
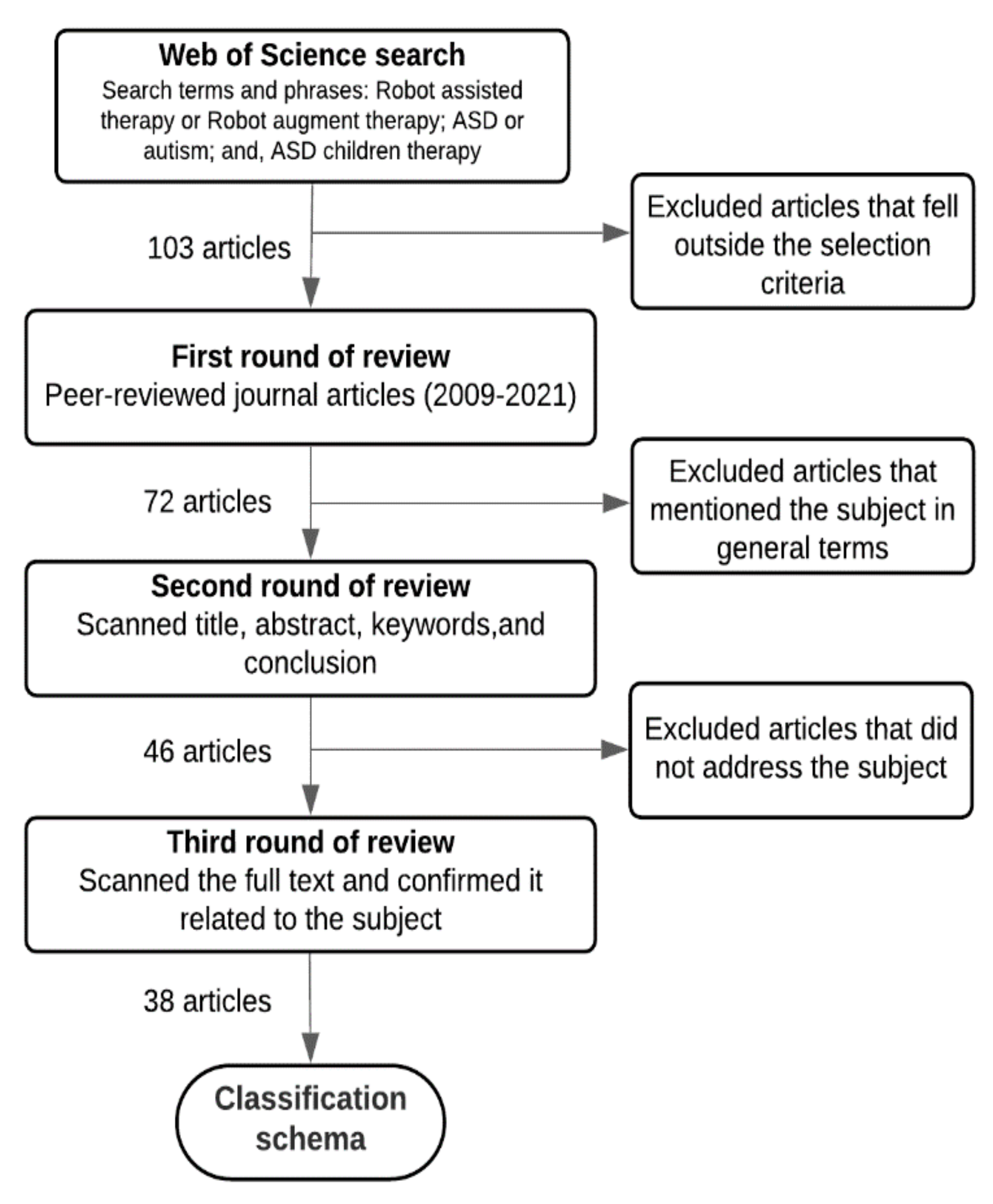
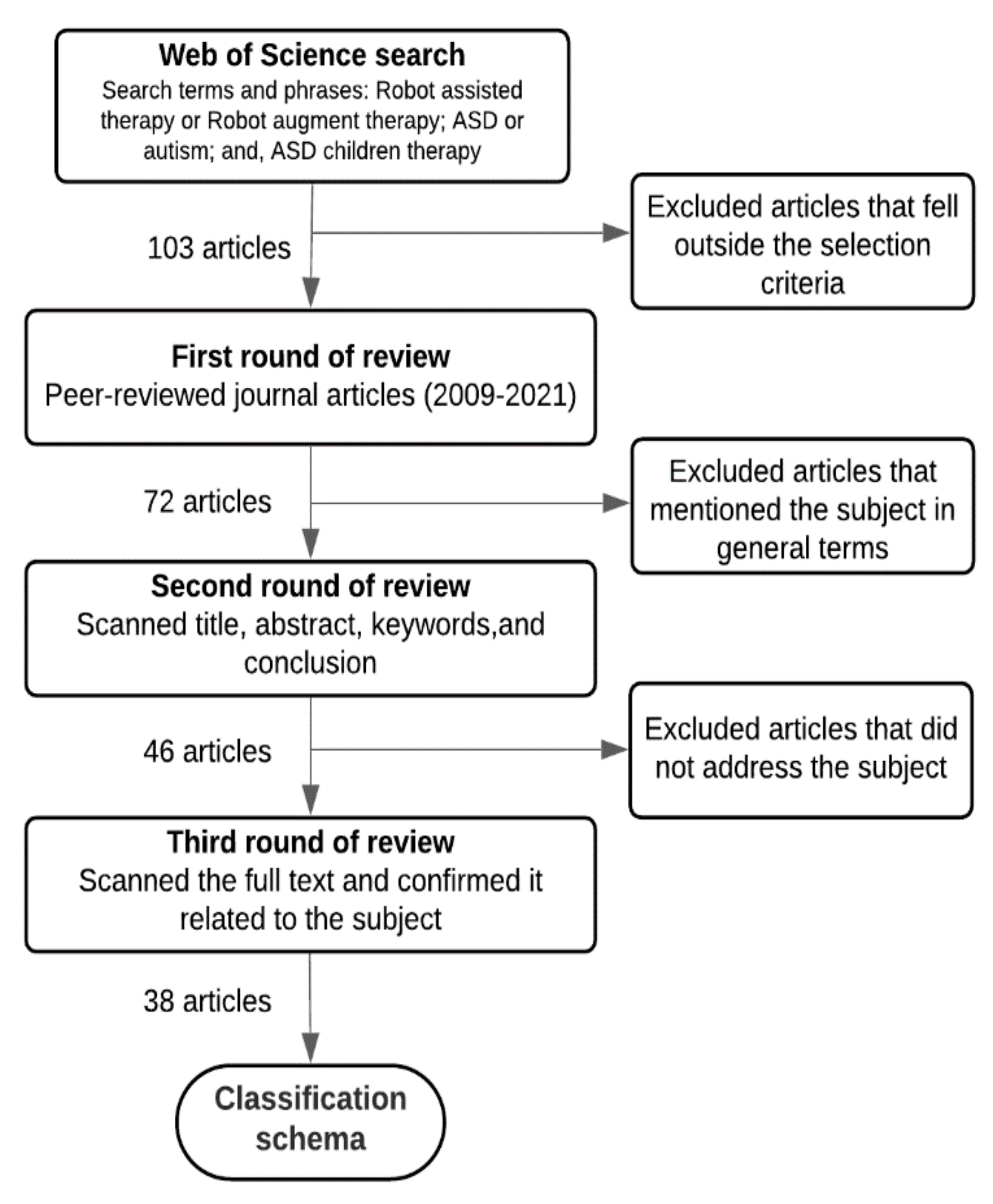
2. Research Methodology
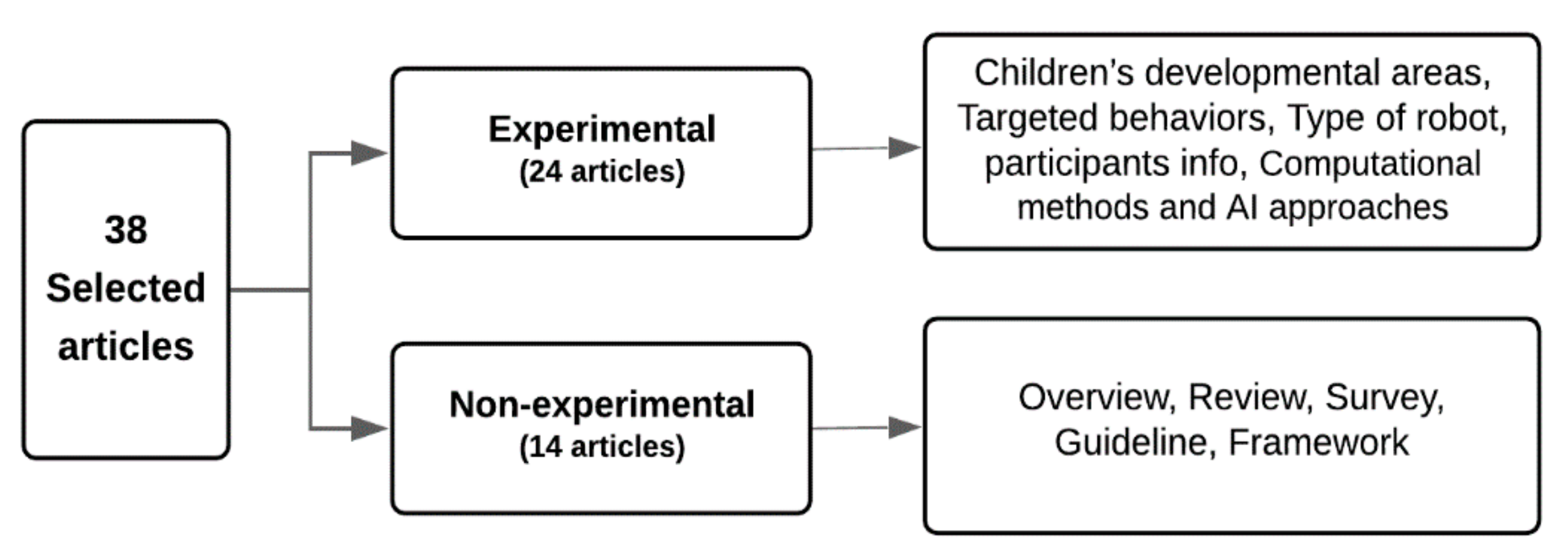
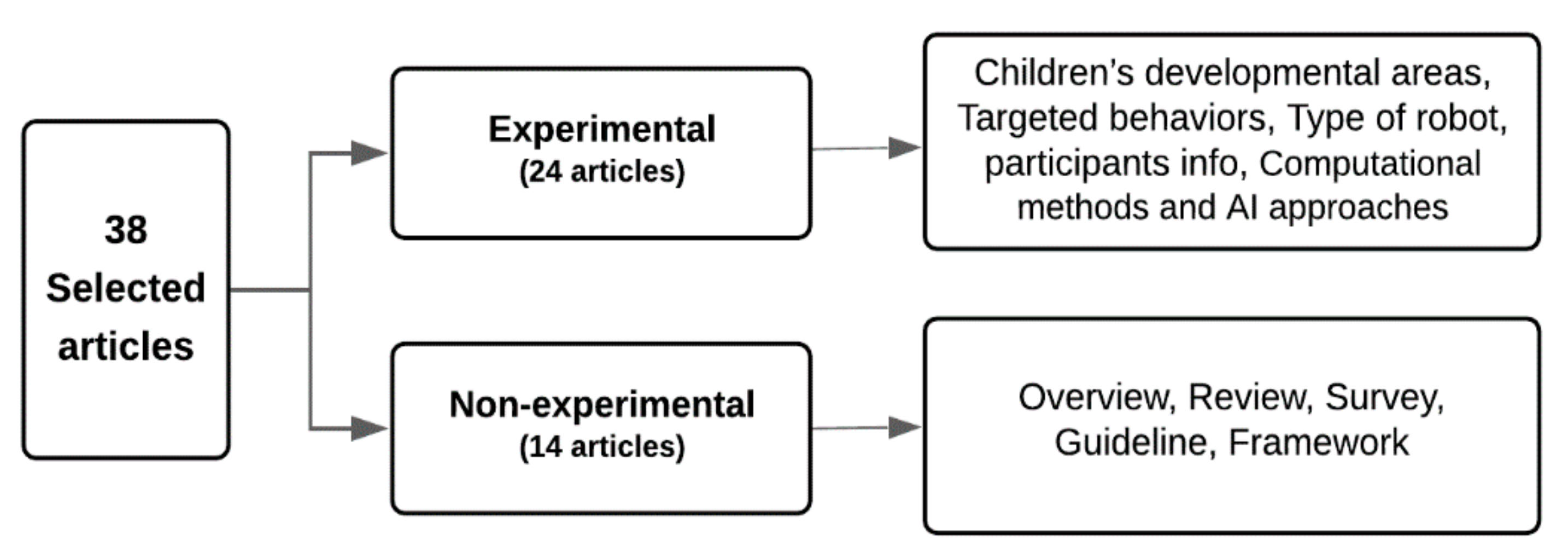
3. Classification Method
- Children’s developmental areas: Involving processes that combined therapy with education to help children with ASD in their development (e.g., social and emotional, communication and interaction, cognitive, motor, and sensory development);
- Targeted behaviors: Therapeutic scenarios and activities that the robot could target (e.g., imitation, eye contact, turn-taking, emotion recognition and expression, self-initiated interactions, and/or triadic and dyadic interactions);
- Type of robot used in the concluded experiment (e.g., human-like, animal-like, toy-like, or machine-like robots) along with the name of the product (e.g., Nao robot, Kasper robot);
- Age and number of children who participated in the experiment.
- Overview articles: Summarize or recap either a product or ways to use it and include some other information, such as advantages and disadvantages or pros and cons;
- Review articles: Summarize the current state of some topics and the related recent research papers and create an understanding for the reader by discussing the findings, challenges, and future work;
- Survey articles: Collect information about a group of people (from interviews, questionnaires, focus groups, etc.) and then present and analyze the results and provide recommendations;
- Guideline articles: Provide guidelines for designing new solutions or alternative options to the current solution;
- Framework articles: Propose a structure intended to support or guide the design of something that expands the structure into something useful.
4. Results and Discussion
4.1. Experimental Papers
4.1.1. Article Classification by Children’s Developmental Area
Social and Emotional Development

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Focus | Definition | Ref. |
|---|---|---|
| Social development | These articles investigate how selected robot features affect the development of social communication skills in children with ASD, with the aim of helping the children to understand and behave appropriately in social situations and improve their ability to generate and respond to behavioral requests | Marino et al., 2020 [10] Taheri et al., 2018 [19] Pop et al., 2013 [20] Mengoni et al., 2017 [21] Ghiglino et al., 2021 [22] Vanderborght et al., 2012 [23] Kim et al. 2021 [24] Yun et al., 2016 [25] |
| Measuring engagement | These articles measure engagement in RAAT by detecting their visual attention and positive changes in behaviors | Rakhymbayeva et al., 2021 [2] Rudovic et al., 2017 [14] Di Nuovo et al., 2018 [18] Rudovic et al., 2018 [26] |
| Emotional expression | These articles identify situation-based emotions with the aim of enhancing emotional expression among children with ASD | Anamaria et al., 2013 [17] Costescu et al., 2016 [27] |
Communication and Interaction Development
| Focus | Definition | Ref. |
|---|---|---|
| Verbal communication functionalities | These articles study the response of children with low-functioning autism to robots with verbal communication functionalities. | Lee et al., 2012 [28] |
| Learning and interaction abilities | These articles focus on behavioral development, including learning alphabets, numbers, human recognition, and assistance in other learning tasks. | Bharatharaj et al., 2017 [29] Bharatharaj et al., 2017 [31] |
| General interventions between robot and children | These articles focus on improving spontaneous utterances, social interaction, joint attention, and requesting behaviors. | Boccanfuso et al., 2017 [30] Silva et al., 2019 [32] |
Cognitive Development
Motor Development
Sensory Development
Areas Other than Developmental (Screening Children with ASD)
4.1.2. Article Classification by Robot Type
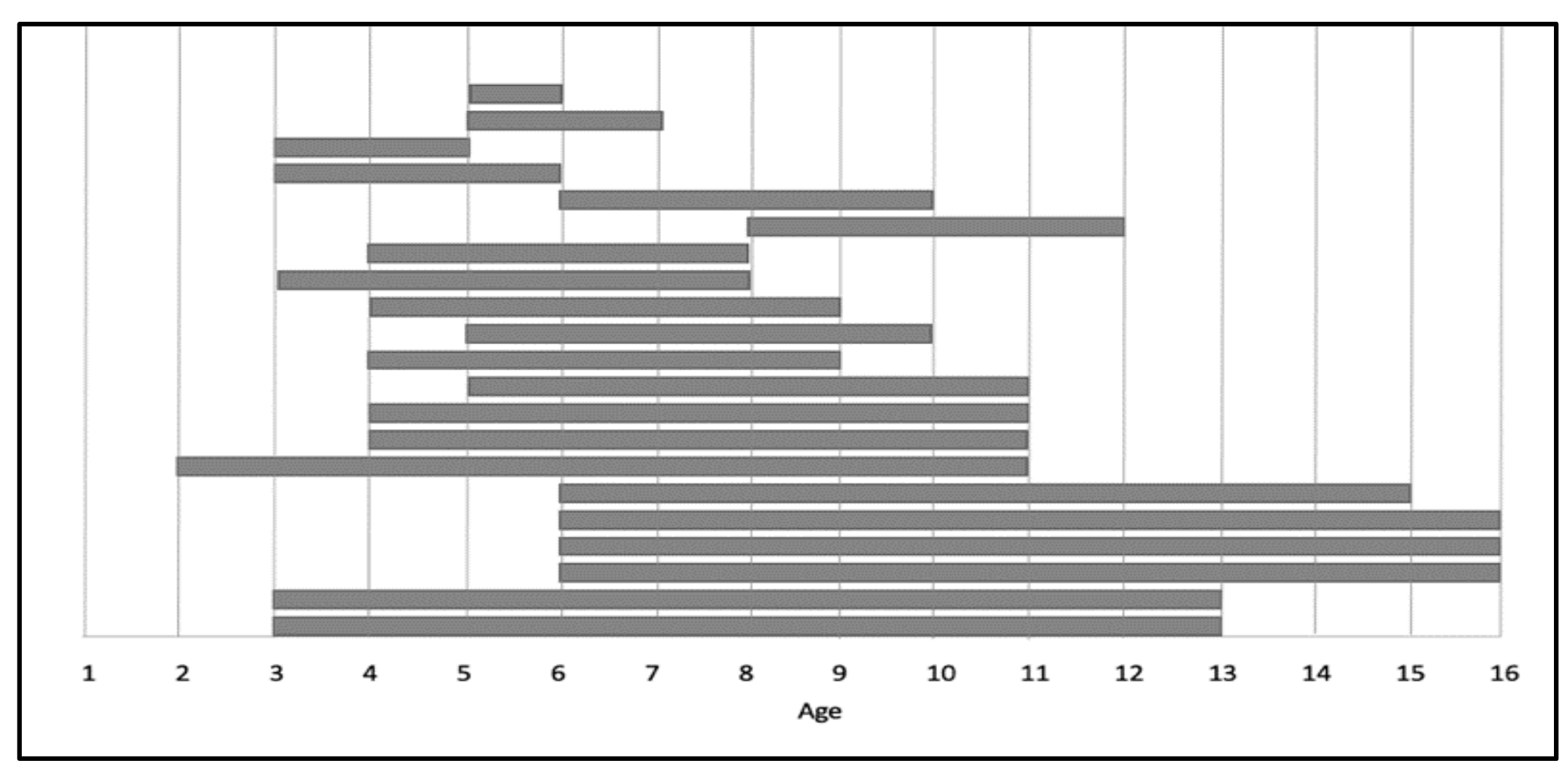
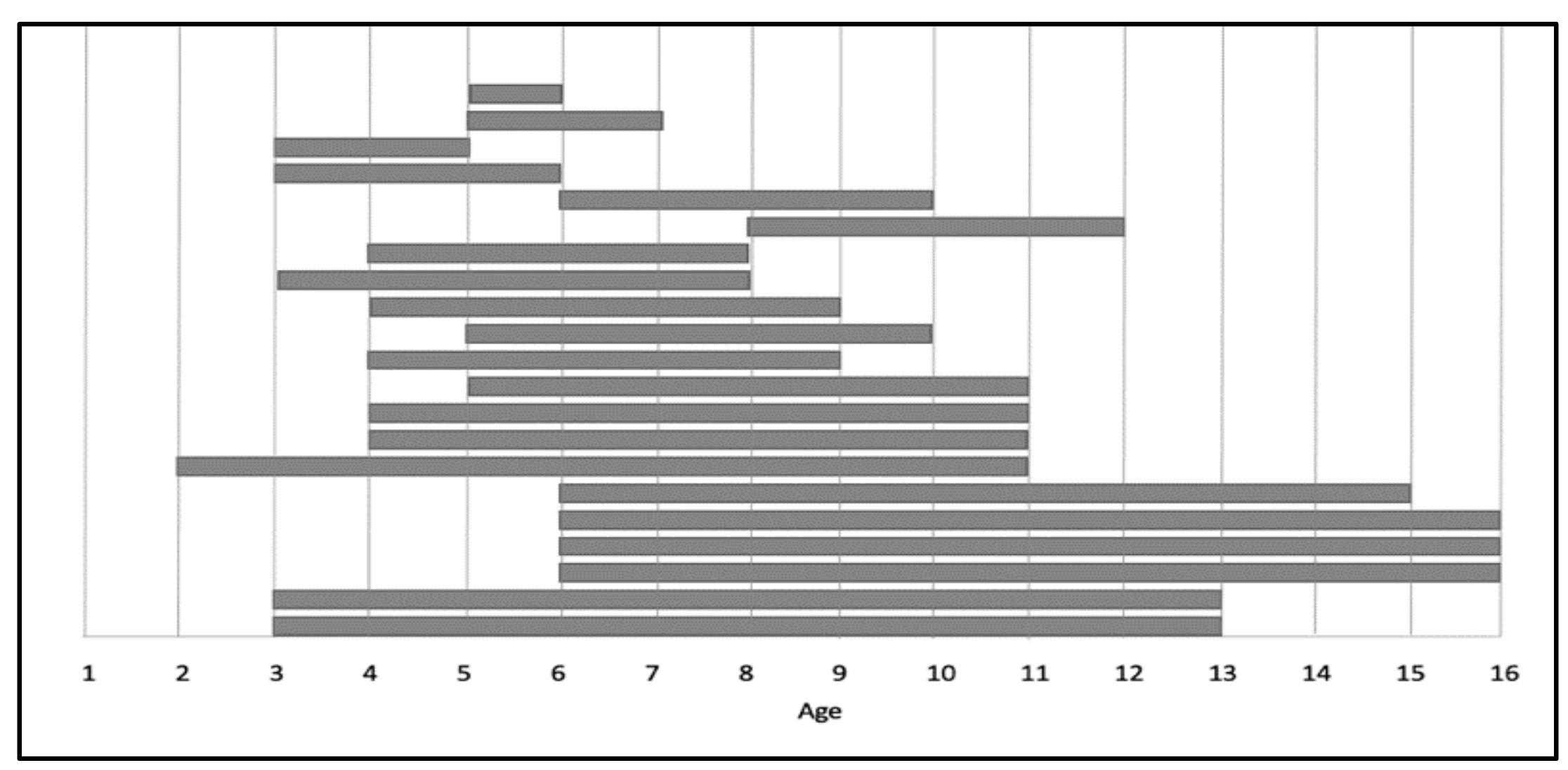
4.1.3. Article Classification by Participants
4.1.4. Targeted Behaviors
4.1.5. Computational Methods and AI Approaches
4.2. Non-Experimental Papers
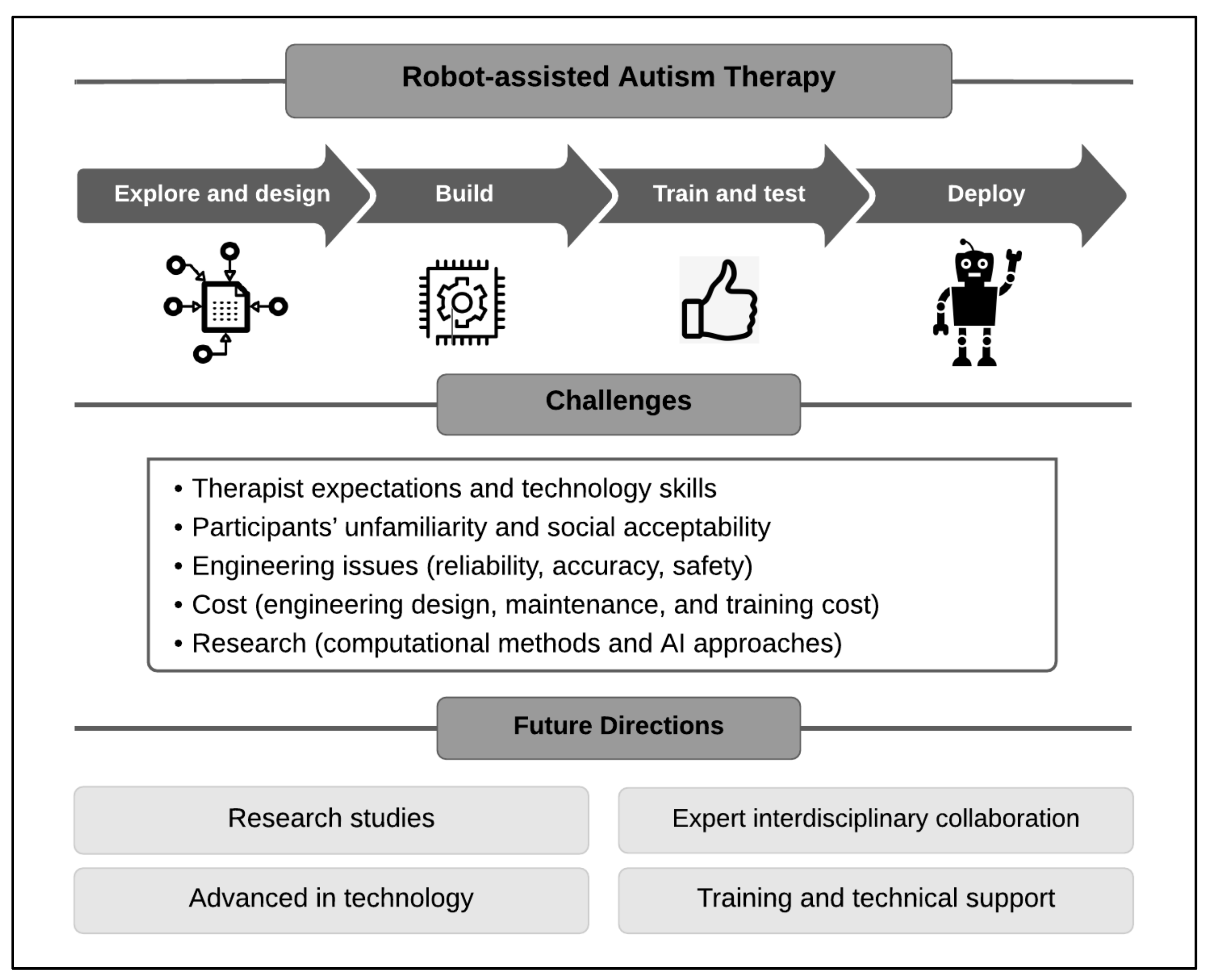
5. Challenges and Future Directions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
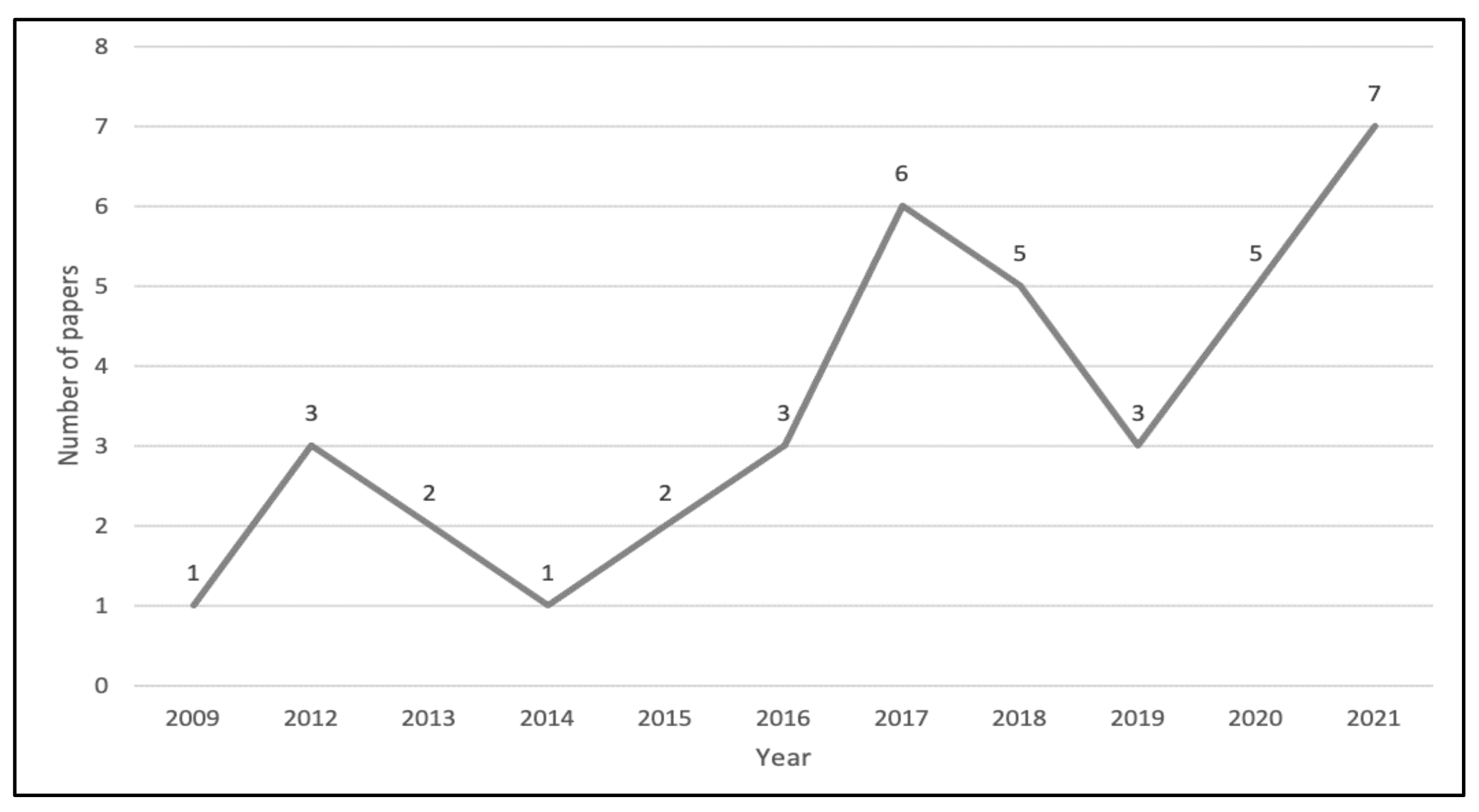
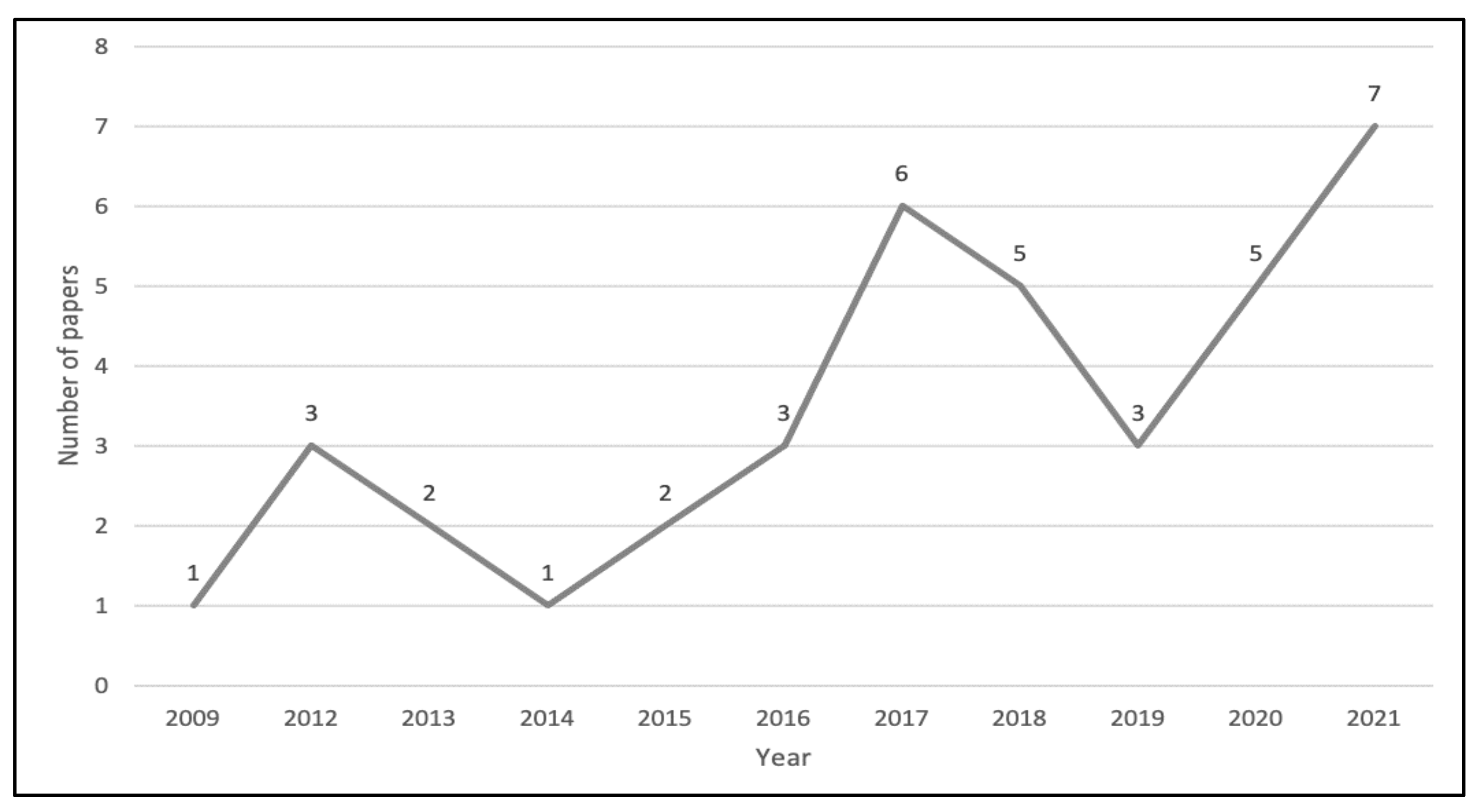
Appendix A.1. Trends in Number of Publications for Robot-Assisted Autism Therapy
Appendix A.2. Publication Source and Scientific Activity Field
| Online Database | No. of Articles | Online Database | No. of Articles |
|---|---|---|---|
| Springer Nature | 11 | John Benjamins Publishing Co. | 2 |
| Frontiers Media Sa | 4 | Amer. Assoc. Advancement Science | 1 |
| MDPI | 4 | Amer. Occupational Therapy Assoc. | 1 |
| Sage | 3 | Assoc. Computing Machinery | 1 |
| Elsevier | 2 | BMJ Publishing Group | 1 |
| Journal | No. of Articles |
|---|---|
| International Journal of Social Robotics | 5 |
| Frontiers in Robotics and AI | 4 |
| Interaction Studies | 2 |
| International Journal of Advanced Robotic Systems | 2 |
| Journal of Autism and Developmental Disorders | 2 |
| Robotics | 2 |
| Field/Domain | No. of Articles | Field/Domain | No. of Articles |
|---|---|---|---|
| Robotics | 18 | Computer science (software engineering) | 1 |
| Developmental psychology | 4 | Educational research | 1 |
| Computer science (AI) | 3 | Special education | 1 |
| Multidisciplinary sciences | 3 | Multidisciplinary engineering | 1 |
| Automation control systems | 2 | Environmental studies | 1 |
| Communication | 2 | Ethics | 1 |
| Computer science (information systems) | 2 | History/philosophy of science | 1 |
| Electrical/electronic engineering | 2 | Instruments/instrumentation | 1 |
| Linguistics | 2 | Philosophy | 1 |
| General/internal medicine | 2 | Psychiatry | 1 |
| Applied physics | 2 | Clinical psychology | 1 |
| Rehabilitation | 2 | Respiratory system | 1 |
| Anthropology | 1 | Sociology | 1 |
References
- Centers for Disease Control and Prevention. What Is Autism Spectrum Disorder? Available online: https://www.cdc.gov/ncbddd/autism/facts.html (accessed on 11 December 2021).
- Rakhymbayeva, N.; Amirova, A.; Sandygulova, A. A Long-Term Engagement with a Social Robot for Autism Therapy. Front. Robot. Ai 2021, 8, 14. [Google Scholar] [CrossRef]
- Yuan, F.P.; Klavon, E.; Liu, Z.M.; Lopez, R.P.; Zhao, X.P. A Systematic Review of Robotic Rehabilitation for Cognitive Training. Front. Robot. Ai 2021, 8, 24. [Google Scholar] [CrossRef]
- Huijnen, C.; Lexis, M.A.S.; Jansens, R.; de Witte, L.P. How to Implement Robots in Interventions for Children with Autism? A Co-creation Study Involving People with Autism, Parents and Professionals. J. Autism Dev. Disord. 2017, 47, 3079–3096. [Google Scholar] [CrossRef] [Green Version]
- DiPietro, J.; Kelemen, A.; Liang, Y.L.; Sik-Lanyi, C. Computer- and Robot-Assisted Therapies to Aid Social and Intellectual Functioning of Children with Autism Spectrum Disorder. Medicina 2019, 55, 440. [Google Scholar] [CrossRef] [Green Version]
- Robins, B.; Dautenhahn, K. Tactile Interactions with a Humanoid Robot: Novel Play Scenario Implementations with Children with Autism. Int. J. Soc. Robot. 2014, 6, 397–415. [Google Scholar] [CrossRef] [Green Version]
- Clabaugh, C.; Mataric, M. Escaping Oz: Autonomy in Socially Assistive Robotics. Annu. Rev. Control Robot. Auton. Syst. 2019, 2, 33–61. [Google Scholar] [CrossRef]
- Tennyson, M.F.; Kuester, D.A.; Casteel, J.; Nikolopoulos, C. Accessible robots for improving social skills of individuals with autism. J. Artif. Intell. Soft Comput. Res. 2016, 6, 267–277. [Google Scholar] [CrossRef] [Green Version]
- van den Berk-Smeekens, I.; van Dongen-Boomsma, M.; De Korte, M.W.P.; Den Boer, J.C.; Oosterling, I.J.; Peters-Scheffer, N.C.; Buitelaar, J.K.; Barakova, E.I.; Lourens, T.; Staal, W.G.; et al. Adherence and acceptability of a robot-assisted Pivotal Response Treatment protocol for children with autism spectrum disorder. Sci. Rep. 2020, 10, 11. [Google Scholar] [CrossRef]
- Marino, F.; Chila, P.; Sfrazzetto, S.T.; Carrozza, C.; Crimi, I.; Failla, C.; Busa, M.; Bernava, G.; Tartarisco, G.; Vagni, D.; et al. Outcomes of a Robot-Assisted Social-Emotional Understanding Intervention for Young Children with Autism Spectrum Disorders. J. Autism Dev. Disord. 2020, 50, 1973–1987. [Google Scholar] [CrossRef]
- Taheri, A.; Meghdari, A.; Alemi, M.; Pouretemad, H.R. Teaching music to children with autism: A social robotics challenge. Sci. Iran. 2019, 26, 40–58. [Google Scholar] [CrossRef] [Green Version]
- Barakova, E.I.; Bajracharya, P.; Willemsen, M.; Lourens, T.; Huskens, B. Long-term LEGO therapy with humanoid robot for children with ASD. Expert Syst. 2015, 32, 698–709. [Google Scholar] [CrossRef]
- Lim, V.; Rooksby, M.; Cross, E.S. Social Robots on a Global Stage: Establishing a Role for Culture during Human-Robot Interaction. Int. J. Soc. Robot. 2021, 13, 1307–1333. [Google Scholar] [CrossRef]
- Rudovic, O.; Lee, J.; Mascarell-Maricic, L.; Schuller, B.W.; Picard, R.W. Measuring Engagement in Robot-Assisted Autism Therapy: A Cross-Cultural Study. Front. Robot. Ai 2017, 4, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Web of Science (WoS). Available online: https://webofknowledge.com (accessed on 10 November 2021).
- Robins, B.; Dautenhahn, K.; Ferrari, E.; Kronreif, G.; Prazak-Aram, B.; Marti, P.; Iacono, I.; Gelderblom, G.J.; Bernd, T.; Caprino, F.; et al. Scenarios of robot-assisted play for children with cognitive and physical disabilities. Interact. Stud. 2012, 13, 189–234. [Google Scholar] [CrossRef] [Green Version]
- Anamaria, P.C.; Ramona, S.; Sebastian, P.; Jelle, S.; Alina, R.; Daniel, D.; Johan, V.; Dirk, L.; Bram, V. Can the social robot probo help children with autism to identify situation-based emotions? A series of single case experiments. Int. J. Hum. Robot. 2013, 10, 24. [Google Scholar] [CrossRef]
- Di Nuovo, A.; Conti, D.; Trubia, G.; Buono, S.; Di Nuovo, S. Deep Learning Systems for Estimating Visual Attention in Robot-Assisted Therapy of Children with Autism and Intellectual Disability. Robotics 2018, 7, 25. [Google Scholar] [CrossRef] [Green Version]
- Taheri, A.; Meghdari, A.; Alemi, M.; Pouretemad, H. Human-Robot Interaction in Autism Treatment: A Case Study on Three Pairs of Autistic Children as Twins, Siblings, and Classmates. Int. J. Soc. Robot. 2018, 10, 93–113. [Google Scholar] [CrossRef]
- Pop, C.A.; Simut, R.E.; Pintea, S.; Saldien, J.; Rusu, A.S.; Vanderfaeillie, J.; David, D.O.; Lefeber, D.; Vanderborght, B. Social robots vs. computer display: Does the way social stories are delivered make a difference for their effectiveness on asd children? J. Educ. Comput. Res. 2013, 49, 381–401. [Google Scholar] [CrossRef]
- Mengoni, S.E.; Irvine, K.; Thakur, D.; Barton, G.; Dautenhahn, K.; Guldberg, K.; Robins, B.; Wellsted, D.; Sharma, S. Feasibility study of a randomised controlled trial to investigate the effectiveness of using a humanoid robot to improve the social skills of children with autism spectrum disorder (Kaspar RCT): A study protocol. BMJ Open 2017, 7, 10. [Google Scholar] [CrossRef] [Green Version]
- Ghiglino, D.; Chevalier, P.; Floris, F.; Priolo, T.; Wykowska, A. Follow the white robot: Efficacy of robot-assistive training for children with autism spectrum disorder. Res. Autism Spectr. Disord. 2021, 86, 101822. [Google Scholar] [CrossRef]
- Vanderborght, B.; Simut, R.; Saldien, J.; Pop, C.; Rusu, A.S.; Pintea, S.; Lefeber, D.; David, D.O. Using the social robot Probo as a social story telling agent for children with ASD. Interact. Stud. 2012, 13, 348–372. [Google Scholar] [CrossRef]
- Kim, S.; Hirokawa, M.; Matsuda, S.; Funahashi, A.; Suzuki, K. Smiles as a Signal of Prosocial Behaviors Toward the Robot in the Therapeutic Setting for Children With Autism Spectrum Disorder. Front. Robot. Ai 2021, 8, 16. [Google Scholar] [CrossRef] [PubMed]
- Yun, S.S.; Kim, H.; Choi, J.; Park, S.K. A robot-assisted behavioral intervention system for children with autism spectrum disorders. Robot. Auton. Syst. 2016, 76, 58–67. [Google Scholar] [CrossRef]
- Rudovic, O.; Lee, J.; Dai, M.; Schuller, B.; Picard, R.W. Personalized machine learning for robot perception of affect and engagement in autism therapy. Sci. Robot. 2018, 3, 11. [Google Scholar] [CrossRef] [Green Version]
- Costescu, C.A.; Vanderborght, B.; David, D.O. Beliefs, emotions, and behaviors—differences between children with asd and typically developing children. a robot-enhanced task. J. Evid.-Based Psychother. 2016, 16, 221–237. [Google Scholar]
- Lee, J.; Takehashi, H.; Nagai, C.; Obinata, G.; Stefanov, D. Which Robot Features Can Stimulate Better Responses from Children with Autism in Robot-Assisted Therapy? Int. J. Adv. Robot. Syst. 2012, 9, 6. [Google Scholar] [CrossRef] [Green Version]
- Bharatharaj, J.; Huang, L.L.; Elara, M.R.; Al-Jumaily, A.; Krageloh, C. Robot-Assisted Therapy for Learning and Social Interaction of Children with Autism Spectrum Disorder. Robotics 2017, 6, 4. [Google Scholar] [CrossRef] [Green Version]
- Boccanfuso, L.; Scarborough, S.; Abramson, R.K.; Hall, A.V.; Wright, H.H.; O’Kane, J.M. A low-cost socially assistive robot and robot-assisted intervention for children with autism spectrum disorder: Field trials and lessons learned. Auton. Robot. 2017, 41, 637–655. [Google Scholar] [CrossRef]
- Bharatharaj, J.; Huang, L.L.; Al-Jumaily, A.; Elara, M.R.; Krageloh, C. Sociopsychological and physiological effects of a robot-assisted therapy for children with autism. Int. J. Adv. Robot. Syst. 2017, 14, 11. [Google Scholar] [CrossRef]
- Silva, K.; Lima, M.; Santos-Magalhaes, A.; Fafiaes, C.; de Sousa, L. Living and Robotic Dogs as Elicitors of Social Communication Behavior and Regulated Emotional Responding in Individuals with Autism and Severe Language Delay: A Preliminary Comparative Study. Anthrozoos 2019, 32, 23–33. [Google Scholar] [CrossRef]
- Francois, D.; Powell, S.; Dautenhahn, K. A long-term study of children with autism playing with a robotic pet Taking inspirations from non-directive play therapy to encourage children’s proactivity and initiative-taking. Interact. Stud. 2009, 10, 324–373. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.; Xiao, W.J.; Hu, L.; Ma, Y.J.; Zhang, Y.; Tao, G.M. Cognitive Wearable Robotics for Autism Perception Enhancement. ACM Trans. Internet Technol. 2021, 21, 1–16. [Google Scholar] [CrossRef]
- Palsbo, S.E.; Hood-Szivek, P. Effect of Robotic-Assisted Three-Dimensional Repetitive Motion to Improve Hand Motor Function and Control in Children With Handwriting Deficits: A Nonrandomized Phase 2 Device Trial. Am. J. Occup. Ther. 2012, 66, 682–690. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dehkordi, P.S.; Moradi, H.; Mahmoudi, M.; Pouretemad, H.R. The Design, Development, and Deployment of RoboParrot for Screening Autistic Children. Int. J. Soc. Robot. 2015, 7, 513–522. [Google Scholar] [CrossRef]
- Conti, D.; Trubia, G.; Buono, S.; Nuovo, S.; Di Nuovo, A. Social robots to support practitioners in the education and clinical care of children: The CARER-AID project. Life Span Disabil. 2020, 23, 17–30. [Google Scholar]
- Feng, Y.L.; Jia, Q.X.; Wei, W. A Control Architecture of Robot-Assisted Intervention for Children with Autism Spectrum Disorders. J. Robot. 2018, 2018, 3246708. [Google Scholar] [CrossRef]
- Ueyama, Y. A Bayesian Model of the Uncanny Valley Effect for Explaining the Effects of Therapeutic Robots in Autism Spectrum Disorder. PLoS ONE 2015, 10, e0138642. [Google Scholar] [CrossRef]
- Baraka, K.; Melo, F.S.; Couto, M.; Veloso, M. Optimal action sequence generation for assistive agents in fixed horizon tasks. Auton. Agents Multi-Agent Syst. 2020, 34, 36. [Google Scholar] [CrossRef]
- Cai, H.B.; Fang, Y.F.; Jue, Z.J.; Costescu, C.; David, D.; Billing, E.; Ziemke, T.; Thill, S.; Belpaeme, T.; Vanderborght, B.; et al. Sensing-Enhanced Therapy System for Assessing Children With Autism Spectrum Disorders: A Feasibility Study. IEEE Sens. J. 2019, 19, 1508–1518. [Google Scholar] [CrossRef] [Green Version]
- Robins, B.; Dautenhahn, K. Kaspar, the social robot and ways it may help children with autism—An overview. Enfance 2018, 1, 91–101. [Google Scholar] [CrossRef]
- Wood, L.J.; Zaraki, A.; Robins, B.; Dautenhahn, K. Developing Kaspar: A Humanoid Robot for Children with Autism. Int. J. Soc. Robot. 2021, 13, 491–508. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Coeckelbergh, M.; Pop, C.; Simut, R.; Peca, A.; Pintea, S.; David, D.; Vanderborght, B. A Survey of Expectations About the Role of Robots in Robot-Assisted Therapy for Children with ASD: Ethical Acceptability, Trust, Sociability, Appearance, and Attachment. Sci. Eng. Ethics 2016, 22, 47–65. [Google Scholar] [CrossRef] [PubMed]
- Ramirez-Duque, A.A.; Aycardi, L.F.; Villa, A.; Munera, M.; Bastos, T.; Belpaeme, T.; Frizera-Neto, A.; Cifuentes, C.A. Collaborative and Inclusive Process with the Autism Community: A Case Study in Colombia About Social Robot Design. Int. J. Soc. Robot. 2021, 13, 153–167. [Google Scholar] [CrossRef] [Green Version]
- Lytridis, C.; Bazinas, C.; Sidiropoulos, G.; Papakostas, G.A.; Kaburlasos, V.G.; Nikopoulou, V.A.; Holeva, V.; Evangeliou, A. Distance Special Education Delivery by Social Robots. Electronics 2020, 9, 1034. [Google Scholar] [CrossRef]

| Focus | Definition | Ref. |
|---|---|---|
| Proactivity and self-initiation | These articles focus on Pivotal Response Treatment (PRT), such as motivation for social interaction and self-initiations. Also, encouraging children’s creativity and initiative-taking. | Van den Berk-Smeekens et al., 2020 [9] Francois et al., 2009 [33] |
| Perception enhancement | These articles present cognitive wearable robotics for autism to improve perception. | Chen et al., 2021 [34] |
| Target Behaviors | Definition | Ref. |
|---|---|---|
| Imitation | The child’s ability to learn and develop new skills by copying others’ behaviors | Rakhymbayeva et al., 2021 [2] Taheri et al., 2018 [19] Mengoni et al., 2017 [21] Costescu et al., 2016 [27] Boccanfuso et al., 2017 [30] |
| Eye contact | A form of nonverbal communication and part of the child’s social development | Yun et al., 2016 [25] Conti et al., 2020 [37] |
| Joint attention | Attentional focus shared between two individuals looking at the same target using eye gaze or pointing | Taheri et al., 2018 [19] Mengoni et al., 2017 [21] Ghiglino et al., 2021 [22] Yun et al., 2016 [25] Boccanfuso et al., 2017 [30] |
| Turn-taking | The child’s ability to take turns and listen while another is speaking | Taheri et al., 2018 [19] Mengoni et al., 2017 [21] |
| Emotion recognition and expression | The child’s ability to read and interpret limited facial expressions and body language | Vanderborght et al., 2012 [23] Costescu et al., 2016 [27] Lee et al., 2012 [28] Bharatharaj, Huang, Elara, et al., 2017 [29] |
| Self-initiated interactions | The child’s ability to train themselves to initiate interactions and ask for things they need | Francois et al., 2009 [33] |
| Triadic and dyadic interactions | The triadic model uses a robot as a mediator between the child and other people, whereas the dyadic model only involves the robot and child | Marino et al., 2020 [10] |
| Type | Definition | Ref. |
|---|---|---|
| Review | These articles review robotic rehabilitation for cognitive training and review the IT platforms evaluated and RAAT for ASD children. | Yuan et al., 2021 [3] DiPietro et al., 2019 [5] |
| Framework | These articles provide a model/framework or architecture in the context of robot-assisted therapy, for example, testing the effect of a human-looking robot using the Bayesian model. They also present the theoretical framework in the context of RAAT tasks for children with ASD and a propose sensing framework with multi-sensory configuration and fusion. | Feng, Jia, & Wei, 2018 [38] Ueyama, 2015 [39] Baraka, Melo, Couto, & Veloso, 2020 [40] Cai et al., 2019 [41] |
| Overview | These articles provide an overview of the ways in which the robot can engage autistic children. Also, they present an overview of projects on progress, such as Kaspar’s robot and CARER-AID projects. Both aimed at verifying the effects of the introduction of a humanoid robot in the clinical routine. | Conti et al., 2020 [37] Robins & Dautenhahn, 2018 [42] Wood, Zaraki, Robins, & Dautenhahn, 2021 [43] |
| Survey | These articles present a survey of expectations about the role of robots in robot-assisted therapy for children with ASD. | Coeckelbergh et al., 2016 [44] |
| Guidelines | These articles provide guidelines for the design of social robots to be implemented as RAAT for children with ASD. Moreover, some articles present an alternative to implementing synchronous and asynchronous therapeutic sessions. | Huijnen et al., 2017 [4] Robins & Dautenhahn, 2014 [6] Ramirez-Duque et al., 2021 [45] Lytridis et al., 2020 [46] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alabdulkareem, A.; Alhakbani, N.; Al-Nafjan, A. A Systematic Review of Research on Robot-Assisted Therapy for Children with Autism. Sensors 2022, 22, 944. https://doi.org/10.3390/s22030944
Alabdulkareem A, Alhakbani N, Al-Nafjan A. A Systematic Review of Research on Robot-Assisted Therapy for Children with Autism. Sensors. 2022; 22(3):944. https://doi.org/10.3390/s22030944
Chicago/Turabian StyleAlabdulkareem, Amal, Noura Alhakbani, and Abeer Al-Nafjan. 2022. "A Systematic Review of Research on Robot-Assisted Therapy for Children with Autism" Sensors 22, no. 3: 944. https://doi.org/10.3390/s22030944
APA StyleAlabdulkareem, A., Alhakbani, N., & Al-Nafjan, A. (2022). A Systematic Review of Research on Robot-Assisted Therapy for Children with Autism. Sensors, 22(3), 944. https://doi.org/10.3390/s22030944