
Cooperative-PHD Tracking Based on Distributed Sensors for Naval Surveillance Area


Abstract
:1. Introduction
2. Related Works
3. Background
3.1. Problem Statement
3.2. RFS Fundamentals
3.3. PHD Filter Definition
| Algorithm 1GMPHD(D(xk−1)) |
 |
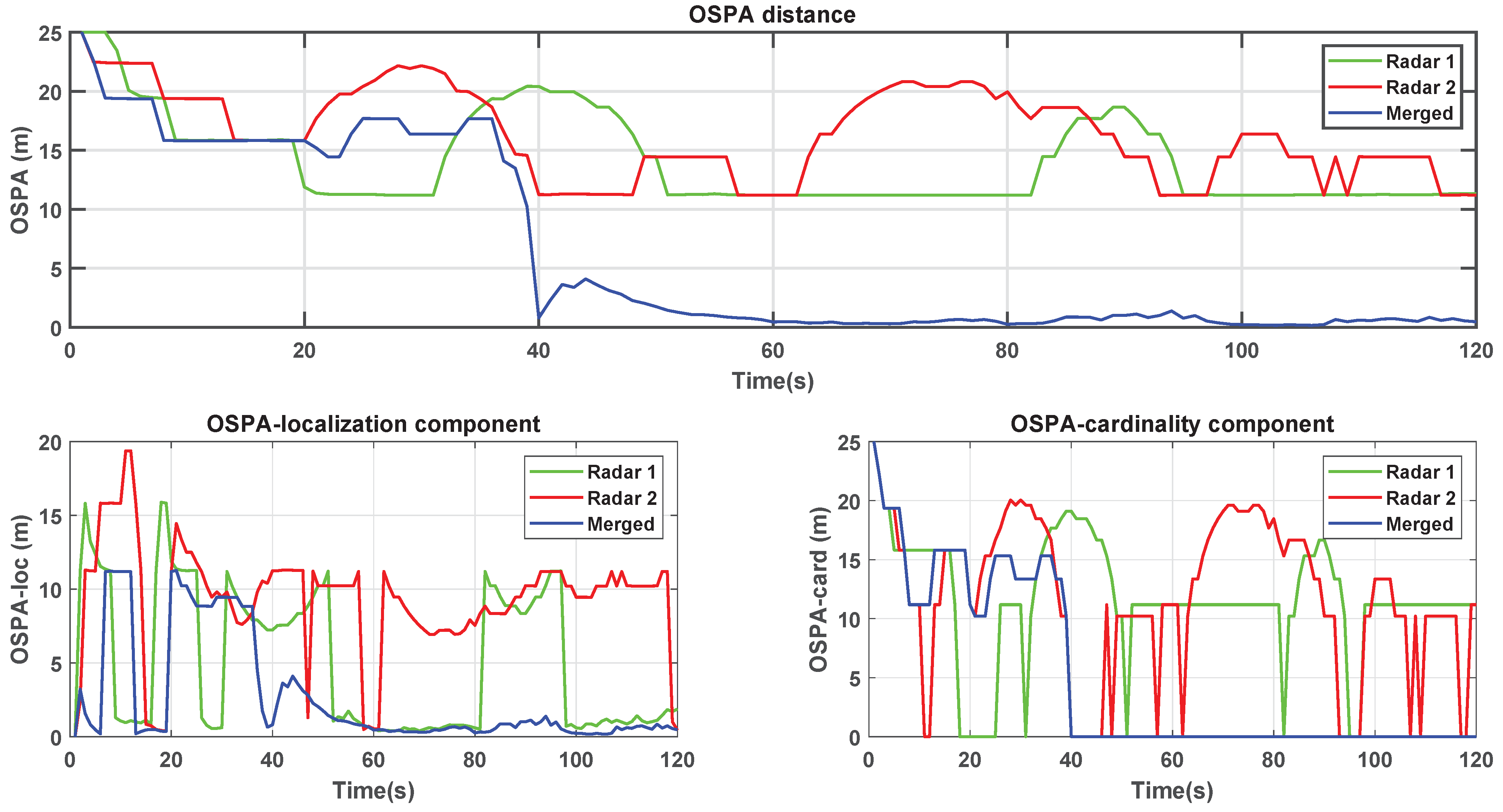
3.4. Optimal Subpattern Assignment (OSPA) Metric
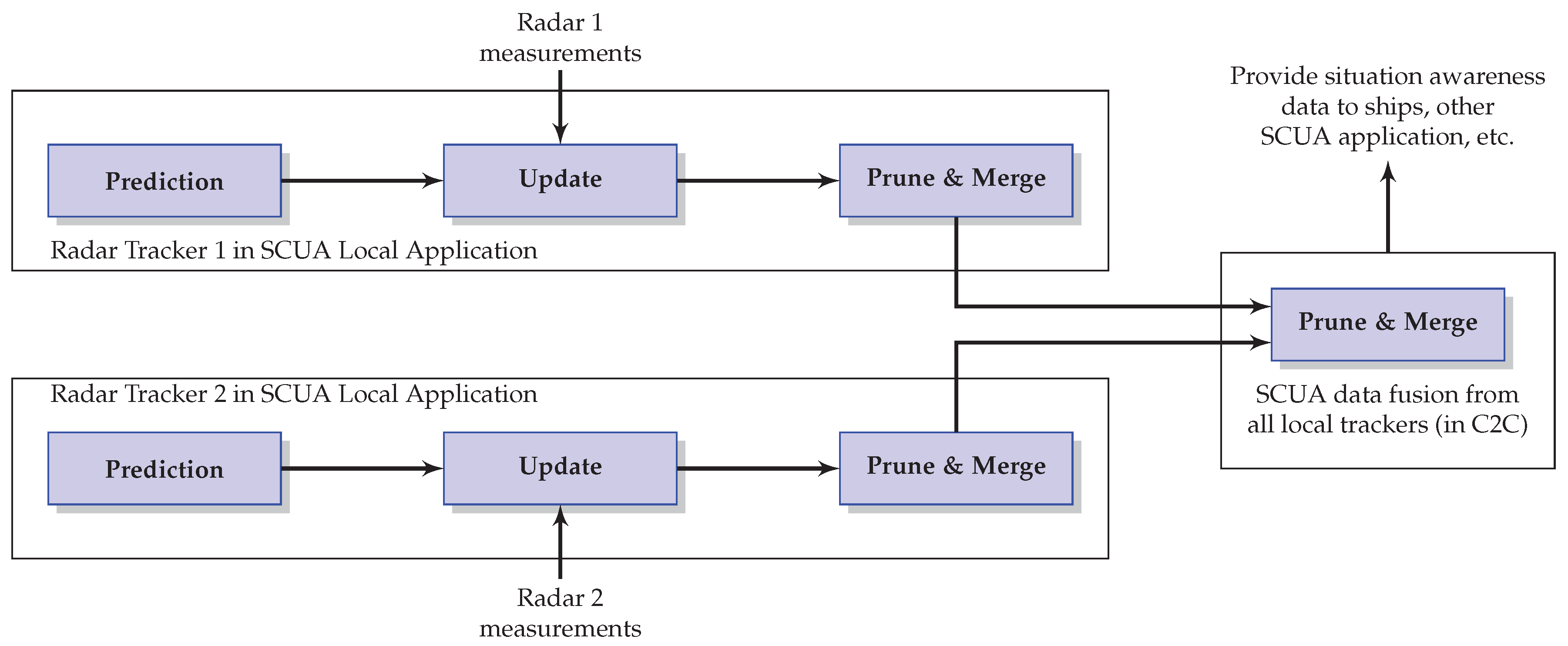
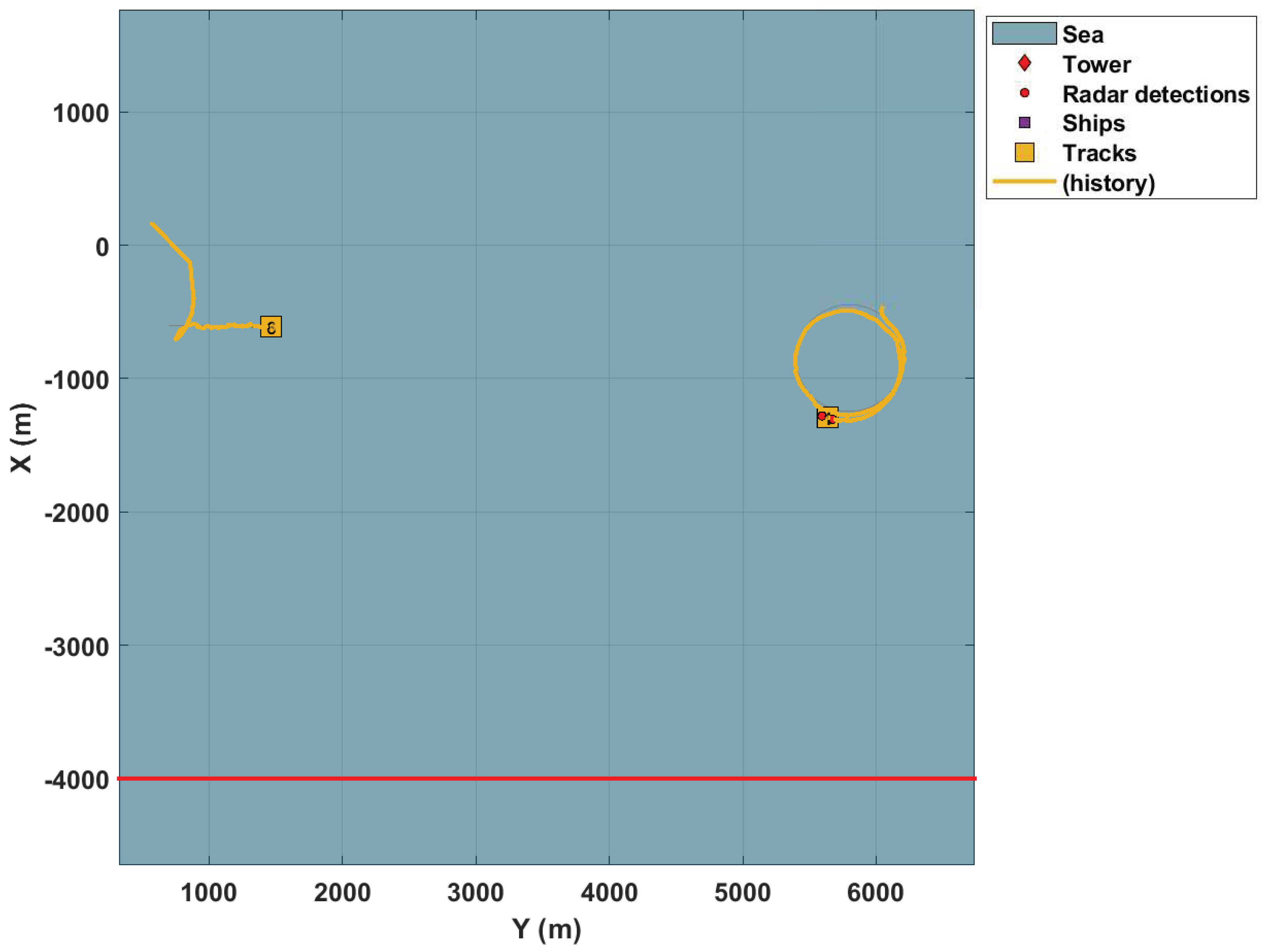
4. Application for Tracking Maritime Surveillance
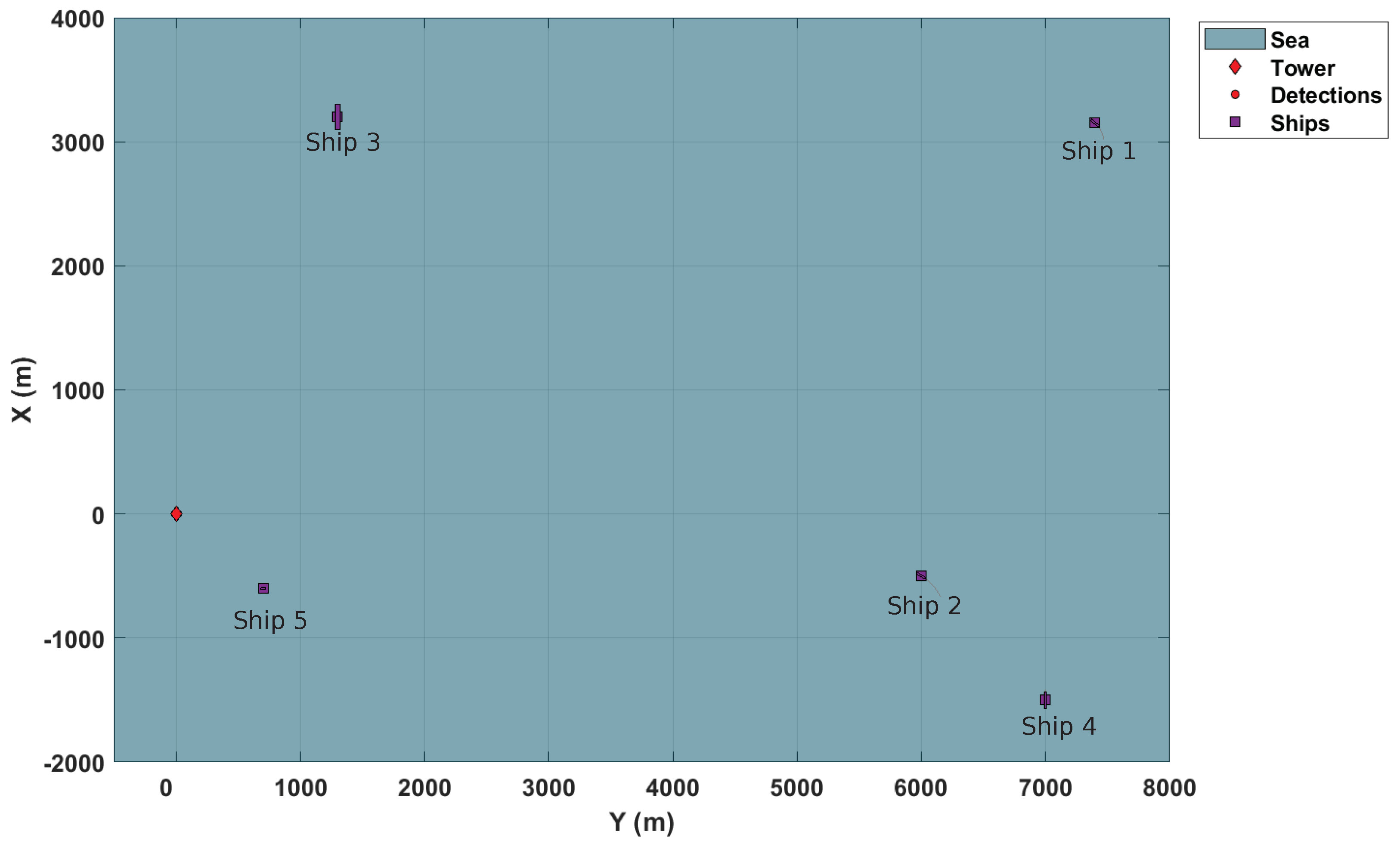
4.1. Surveillance Scenario
4.2. Dynamic Modeling
4.3. Filter Parameters
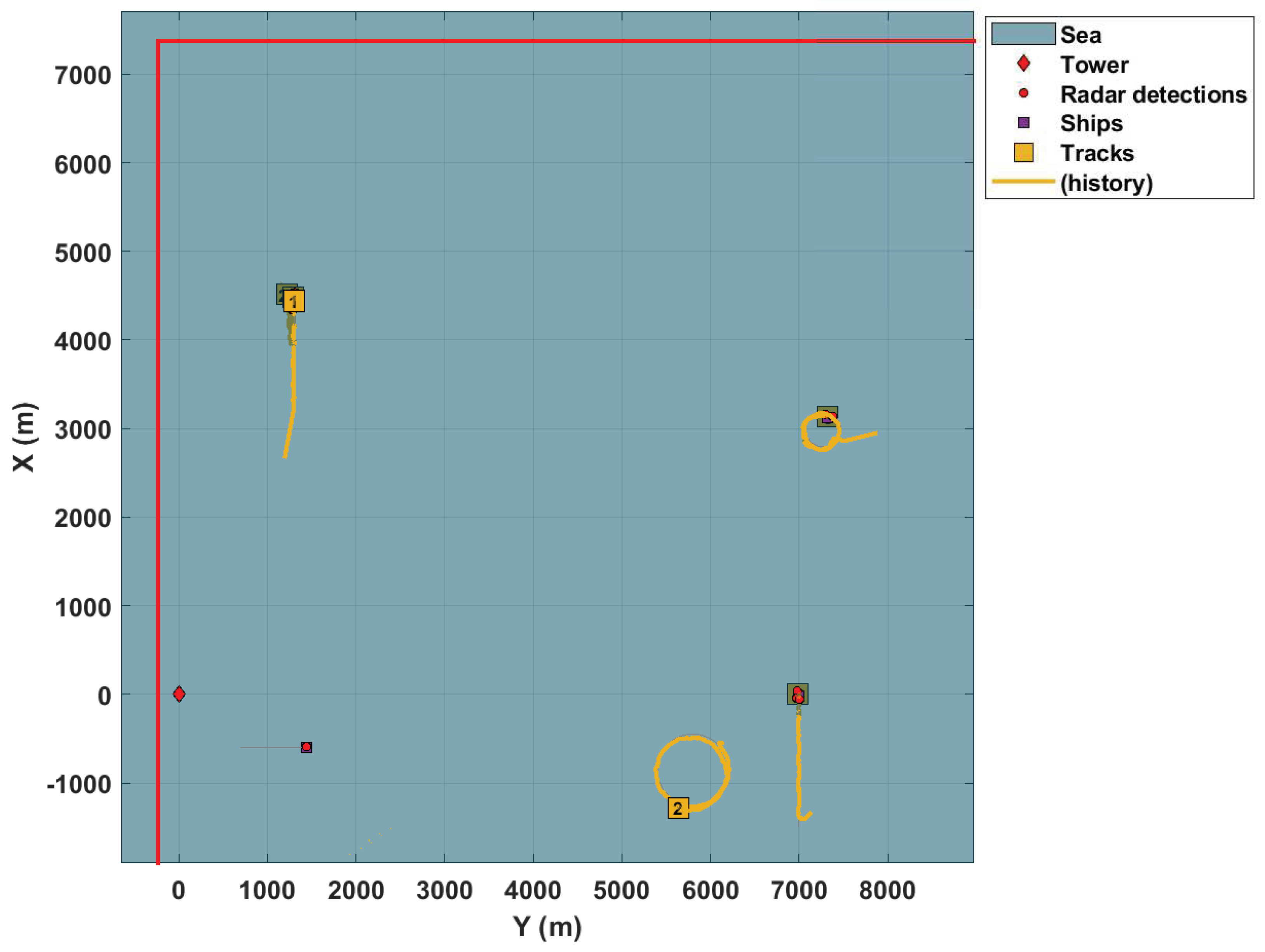
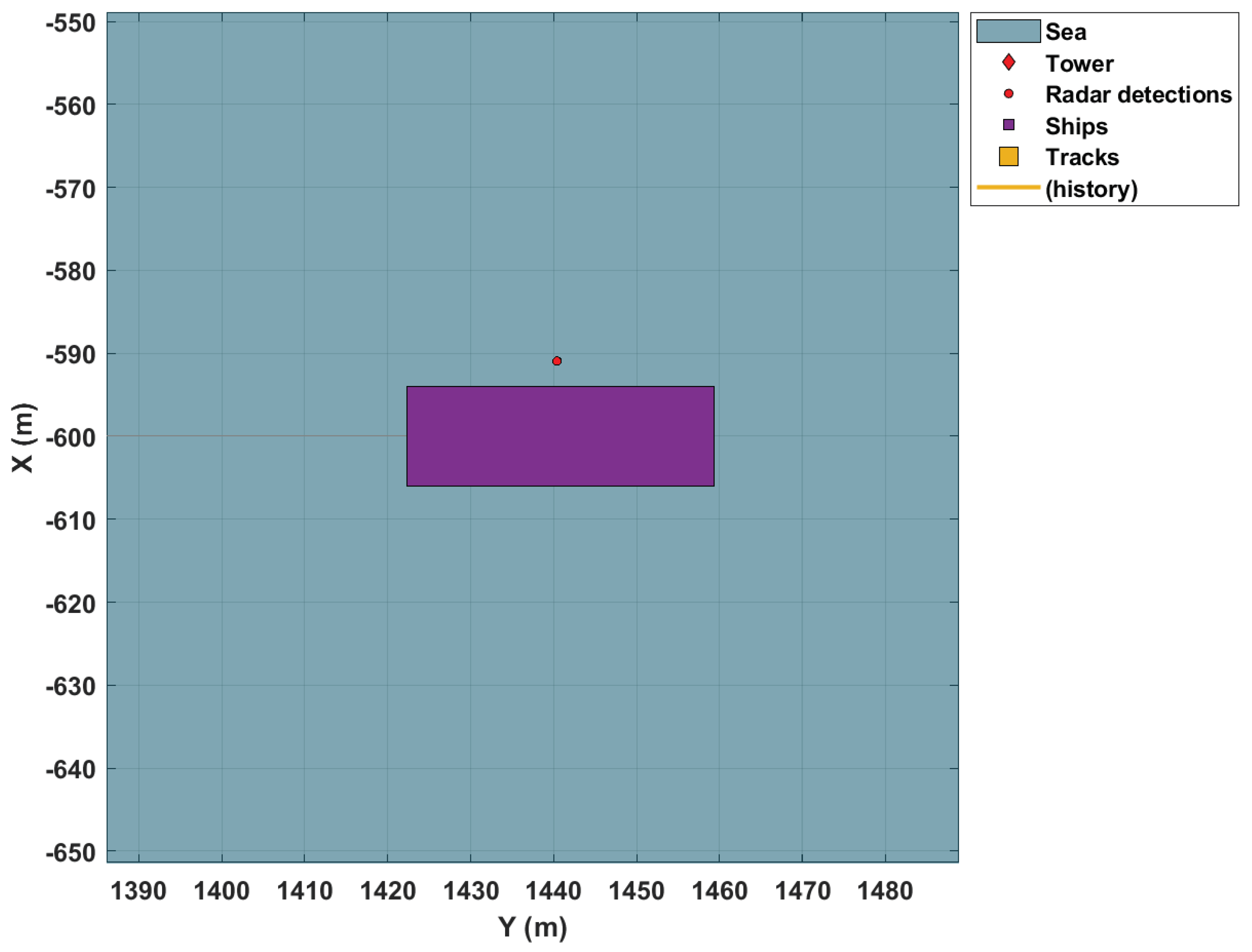
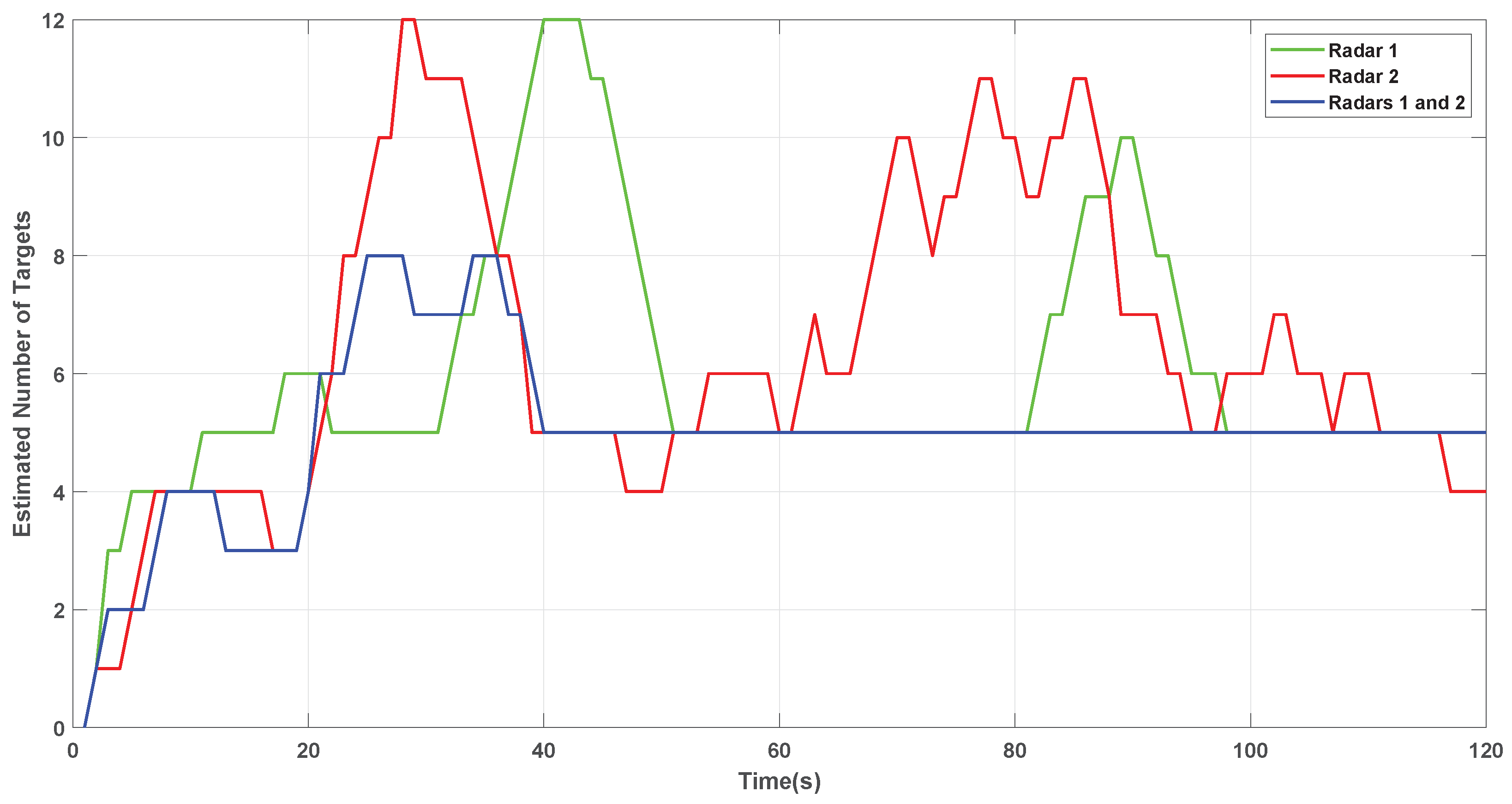
4.4. Results and Discussions
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Plano Estratégico da Marinha. Strategic Programs. Available online: https://www.marinha.mil.br/programas-estrategicos (accessed on 2 April 2020).
- Mahler, R.P.S. Random-set approach to data fusion. In Proceedings of the SPIE’s International Symposium on Optical Engineering and Photonics in Aerospace Sensing, Orlando, FL, USA, 4–8 April 1994. [Google Scholar] [CrossRef]
- Maher, R. A survey of PHD filter and CPHD filter implementations. In Proceedings of the Defense and Security Symposium, Orlando, FL, USA, 9–13 April 2007. [Google Scholar] [CrossRef]
- Gao, L.; Tang, X.; Wei, P. Real-Time Implementation of Particle-PHD Filter Based on GPU. In Proceedings of the 2014 IEEE 17th International Conference on Computational Science and Engineering, Chengdu, China, 19–21 December 2014. [Google Scholar] [CrossRef]
- Zheng, Y.; Shi, Z.; Lu, R.; Hong, S.; Shen, X. An Efficient Data-Driven Particle PHD Filter for Multitarget Tracking. IEEE Trans. Ind. Inform. 2013, 9, 2318–2326. [Google Scholar] [CrossRef]
- Li, T.; Sun, S.; Bolić, M.; Corchado, J.M. Algorithm design for parallel implementation of the SMC-PHD filter. Signal Process. 2016, 119, 115–127. [Google Scholar] [CrossRef] [Green Version]
- Li, T.; Hlawatsch, F.; Djuric, P.M. Cardinality-Consensus-Based PHD Filtering for Distributed Multitarget Tracking. IEEE Signal Process. Lett. 2019, 26, 49–53. [Google Scholar] [CrossRef]
- Li, T.; Mallick, M.; Pan, Q. A Parallel Filtering-Communication-Based Cardinality Consensus Approach for Real-Time Distributed PHD Filtering. IEEE Sens. J. 2020, 20, 13824–13832. [Google Scholar] [CrossRef]
- Li, G.; Yi, W.; Kong, L. A real-time fusion algorithm for asynchronous sensor system with PHD filter. In Proceedings of the 2017 International Conference on Control, Automation and Information Sciences (ICCAIS), Chiang Mai, Thailand, 31 October–1 November 2017. [Google Scholar] [CrossRef]
- Li, G.; Yi, W.; Jiang, M.; Kong, L. Distributed fusion with PHD filter for multi-target tracking in asynchronous radar system. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017. [Google Scholar] [CrossRef]
- Barbosa, R. Fusão de Alvos Utilizando Grafos em Ambientes de Múltiplos Sensores. Ph.D. Thesis, COPPE/UFRJ, Rio de Janeiro, Brazil, 2012. [Google Scholar]
- Livernet, F.; Cuilliere, O. Tracking based on graph theory applied to pairs of plots. In Proceedings of the 2010 IEEE Radar Conference, Arlington, VA, USA, 10–14 May 2010; pp. 90–95. [Google Scholar]
- Mello, R.R.; de Almeida, R.H.P.; Franca, F.M.; Paillard, G.A. A Parallel Implementation of Data Fusion Algorithm Using Gamma. In Proceedings of the 2015 International Symposium on Computer Architecture and High Performance Computing Workshop (SBAC-PADW), Florianopolis, Brazil, 18–21 October 2015. [Google Scholar] [CrossRef]
- Pace, M. Comparison of PHD based filters for the tracking of 3D aerial and naval scenarios. In Proceedings of the 2010 IEEE Radar Conference, Arlington, VA, USA, 10–14 May 2010. [Google Scholar] [CrossRef]
- Pailhas, Y.; Houssineau, J.; Petillot, Y.R.; Clark, D.E. Tracking with MIMO sonar systems: Applications to harbour surveillance. IET Radar Sonar Nav. 2017, 11, 629–639. [Google Scholar] [CrossRef] [Green Version]
- Do, C.T.; Nguyen, T.T.D.; Liu, W. Tracking Multiple Marine Ships via Multiple Sensors with Unknown Backgrounds. Sensors 2019, 19, 5025. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Carthel, C.; Coraluppi, S.; Grignan, P. Multisensor tracking and fusion for maritime surveillance. In Proceedings of the 2007 10th International Conference on Information Fusion, Québec, QC, Canada, 9–12 July 2007. [Google Scholar]
- Vo, B.; Mallick, M.; Bar-shalom, Y.; Coraluppi, S.; Osborne, R., III; Mahler, R.; Vo, B. Multitarget Tracking. Wiley Encycl. Electr. Electron. Eng. 2015, 2015, 1–15. [Google Scholar]
- Arulampalam, M.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef] [Green Version]
- Bazzani, L.; Bloisi, D.D.; Murino, V. A Comparison of Multi Hypothesis Kalman Filter and Particle Filter for Multi-Target Tracking. CVPR 2009. 2009. Available online: https://www.researchgate.net/publication/228373867 (accessed on 3 April 2020).
- Jinan, R.; Raveendran, T. Particle Filters for Multiple Target Tracking. Procedia Technol. 2016, 24, 980–987. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Li, T.; Sun, S.; Corchado, J. A Survey of Recent Advances in Particle Filters and Remaining Challenges for Multitarget Tracking. Sensors 2017, 17, 2707. [Google Scholar] [CrossRef] [Green Version]
- Mahler, R.P.S. Statistical Multisource Multitarget Information Fusion; Artech House, Inc.: Boston, MA, USA, 2007. [Google Scholar]
- Kim, C.; Li, F.; Ciptadi, A.; Rehg, J.M. Multiple Hypothesis Tracking Revisited. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 4696–4704. [Google Scholar]
- Wang, L.Y.; Zhao, Y.J.; Wang, W.X. Study on Theory of Multi-target Tracking and Data Association Algorithms in Phased Array Radar. In Proceedings of the 2006 6th International Conference on ITS Telecommunications, Chengdu, China, 21–23 June 2006; pp. 1232–1235. [Google Scholar] [CrossRef]
- Liggins, M., II; Hall, D.; Llinas, J. (Eds.) Handbook of Multisensor Data Fusion: Theory and Practice, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Zaveri, M.A.; Merchant, S.N.; Desai, U.B. Data Association for Multiple Target Tracking: An Optimization Approach. In Neural Information Processing; Springer: Berlin/Heidelberg, Germany, 2004; pp. 187–192. [Google Scholar] [CrossRef]
- Mahler, R. “Statistics 101” for multisensor, multitarget data fusion. IEEE Aerosp. Electron. Syst. Mag. 2004, 19, 53–64. [Google Scholar] [CrossRef]
- Goodman, I.R.; Mahler, R.P.S.; Nguyen, H.T. Mathematics of Data Fusion; Springer: Dordrecht, The Netherlands, 1997. [Google Scholar] [CrossRef]
- Mahler, R. Multitarget bayes filtering via first-order multitarget moments. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1152–1178. [Google Scholar] [CrossRef]
- Vo, B.N.; Ma, W.K. A closed-form solution for the probability hypothesis density filter. In Proceedings of the 2005 7th International Conference on Information Fusion, Philadelphia, PA, USA, 25–28 July 2005. [Google Scholar] [CrossRef]
- Clark, D.; Bell, J. Convergence results for the particle PHD filter. IEEE Trans. Signal Process. 2006, 54, 2652–2661. [Google Scholar] [CrossRef]
- Clark, D.; Vo, B.N. Convergence Analysis of the Gaussian Mixture PHD Filter. IEEE Trans. Signal Process. 2007, 55, 1204–1212. [Google Scholar] [CrossRef]
- Clark, D.; Vo, B.T.; Vo, B.N. Gaussian Particle Implementations of Probability Hypothesis Density Filters. In Proceedings of the 2007 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2007. [Google Scholar] [CrossRef]
- Clark, D.; Bell, J. Multi-target state estimation and track continuity for the particle PHD filter. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1441–1453. [Google Scholar] [CrossRef]
- Lin, L.; Bar-Shalom, Y.; Kirubarajan, T. Track labeling and PHD filter for multitarget tracking. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 778–795. [Google Scholar] [CrossRef]
- Zajic, T.; Mahler, R.P.S. Particle-systems implementation of the PHD multitarget-tracking filter. In Proceedings of the Signal Processing, Sensor Fusion, and Target Recognition XII, Orlando, FL, USA, 21 April 2003. [Google Scholar] [CrossRef]
- VO, B.; MA, W. The Gaussian Mixture Probability Hypothesis Density Filter. IEEE Trans. Signal Process. 2006, 54, 4091–4104. [Google Scholar] [CrossRef]
- Clark, D.; Panta, K.; Vo, B.N. The GM-PHD Filter Multiple Target Tracker. In Proceedings of the 9th International Conference on Information Fusion, Florence, Italy, 10–13 July 2006. [Google Scholar] [CrossRef]
- Clark, D.; Godsill, S. Group Target Tracking with the Gaussian Mixture Probability Hypothesis Density Filter. In Proceedings of the 2007 3rd International Conference on Intelligent Sensors, Sensor Networks and Information, Melbourne, Australia, 3–6 December 2007. [Google Scholar] [CrossRef]
- Hao, Y.; Meng, F.; Zhou, W.; Sun, F.; Hu, A. Gaussian mixture probability hypothesis density filter algorithm for multi-target tracking. In Proceedings of the 2009 IEEE International Conference on Communications Technology and Applications, Beijing, China, 16–18 October 2009. [Google Scholar] [CrossRef]
- Baisa, N.L.; Wallace, A. Development of a N-type GM-PHD filter for multiple target, multiple type visual tracking. J. Vis. Commun. Image Represent. 2019, 59, 257–271. [Google Scholar] [CrossRef] [Green Version]
- Mahler, R. PHD filters of higher order in target number. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1523–1543. [Google Scholar] [CrossRef]
- Nannuru, S.; Blouin, S.; Coates, M.; Rabbat, M. Multisensor CPHD filter. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1834–1854. [Google Scholar] [CrossRef] [Green Version]
- Vo, B.T.; Vo, B.N.; Cantoni, A. Analytic Implementations of the Cardinalized Probability Hypothesis Density Filter. IEEE Trans. Signal Process. 2007, 55, 3553–3567. [Google Scholar] [CrossRef]
- Mahler, R. A brief survey of advances in random-set fusion. In Proceedings of the 2015 International Conference on Control, Automation and Information Sciences, Changshu, China, 29–31 October 2015. [Google Scholar] [CrossRef]
- Mahler, R. Exact Closed-Form Multitarget Bayes Filters. Sensors 2019, 19, 2818. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Laneuville, D.; Houssineau, J. Passive multi target tracking with GM-PHD filter. In Proceedings of the 2010 13th International Conference on Information Fusion, Edinburgh, UK, 26–29 July 2010. [Google Scholar] [CrossRef]
- Battistelli, G.; Chisci, L.; Fantacci, C.; Farina, A.; Graziano, A. Consensus CPHD Filter for Distributed Multitarget Tracking. IEEE J. Sel. Top. Signal Process. 2013, 7, 508–520. [Google Scholar] [CrossRef]
- Gulmezoglu, B.; Guldogan, M.B.; Gezici, S. Multiperson Tracking with a Network of Ultrawideband Radar Sensors Based on Gaussian Mixture PHD Filters. IEEE Sens. J. 2015, 15, 2227–2237. [Google Scholar] [CrossRef]
- Dias, S.S.; Bruno, M.G.S. Cooperative Target Tracking Using Decentralized Particle Filtering and RSS Sensors. IEEE Trans. Signal Process. 2013, 61, 3632–3646. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation; John Wiley Sons: Hoboken, NJ, USA, 2001. [Google Scholar]
- Ristic, B.; Beard, M.; Fantacci, C. An Overview of Particle Methods for Random Finite Set Models. Inf. Fusion 2016, 31, 110–126. [Google Scholar] [CrossRef] [Green Version]
- Ristic, B. Particle Filters for Random Set Models; Springer: New York, NY, USA, 2013. [Google Scholar] [CrossRef]
- Mullane, J.; Vo, B.N.; Adams, M.; Vo, B.T. Random Finite Sets for Robot Mapping and SLAM: New Concepts in Autonomous Robotic Map Representations; Springer Tracts in Advanced Robotics; Springer: Berlin/Heidelberg, Germany, 2011; Volume 72. [Google Scholar]
- Erdinc, O.; Willett, P.; Bar-Shalom, Y. The Bin-Occupancy Filter and Its Connection to the PHD Filters. IEEE Trans. Signal Process. 2009, 57, 4232–4246. [Google Scholar] [CrossRef]
- Sidenbladh, H. Multi-target particle filtering for the probability hypothesis density. In Proceedings of the Sixth International Conference of Information Fusion, Cairns, Australia, 8–11 July 2003. [Google Scholar] [CrossRef] [Green Version]
- Schuhmacher, D.; Vo, B.T.; Vo, B.N. A Consistent Metric for Performance Evaluation of Multi-Object Filters. IEEE Trans. Signal Process. 2008, 56, 3447–3457. [Google Scholar] [CrossRef] [Green Version]
- Ristic, B.; Vo, B.N.; Clark, D.; Vo, B.T. A Metric for Performance Evaluation of Multi-Target Tracking Algorithms. IEEE Trans. Signal Process. 2011, 59, 3452–3457. [Google Scholar] [CrossRef]
- Yuan, X.; Lian, F.; Han, C. Models and Algorithms for Tracking Target with Coordinated Turn Motion. Math. Probl. Eng. 2014, 2014, 1–10. [Google Scholar] [CrossRef]
- Li, X.R.; Jilkov, V. Survey of maneuvering target tracking. Part I: Dynamic models. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1333–1364. [Google Scholar] [CrossRef]
- Cano, P.; Ruiz-del Solar, J. Robust Tracking of Soccer Robots Using Random Finite Sets. IEEE Intell. Syst. 2017, 32, 22–29. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Entity | Coordinates [km] | Angular Sector Covered by FoV [rad] |
|---|---|---|
| Radar 1 | (7.38, −0.236) | [0, −π/2] |
| Radar 2 | (−4, 9) | [−π/2, π/2] |
| Central Station (Tower) | (0, 0) | Not Applicable |
| Ship | Initial Speed [knot] | Initial Orientation [Deg] | Initial Coordinates [km] | Type of Movement |
|---|---|---|---|---|
| 1 | 20 | 130 | (3.15, 7.4) | Circular with radius 200 m |
| 2 | 30 | 120 | (−0.5, 6) | Circular with radius 400 m |
| 3 | 10 | 0 | (3.2, 1.3) | Constant heading |
| 4 | 12 | 0 | (−1.5, 7) | Constant heading |
| 5 | 6 | 90 | (−0.6, 0.7) | Constant heading |
| Filter Parameter | Value |
|---|---|
| Sensor maximum range | 12 km |
| Distance resolution noise | 25 m |
| Azimuth resolution noise | 0.5° |
| Probability of Survival (pS) | 0.99 |
| Probability of detection (pD) | 0.9 |
| Sensor field-of-view (FoV) | 90° |
| Clutter density | 2 × 10−8 |
| Prune threshold (T) | 10−6 |
| Merge threshold (U) | 25 |
| Extraction threshold (E) | 0.8 |
| Maximum number of components | 1000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lima, K.M.d.; Costa, R.R. Cooperative-PHD Tracking Based on Distributed Sensors for Naval Surveillance Area. Sensors 2022, 22, 729. https://doi.org/10.3390/s22030729
Lima KMd, Costa RR. Cooperative-PHD Tracking Based on Distributed Sensors for Naval Surveillance Area. Sensors. 2022; 22(3):729. https://doi.org/10.3390/s22030729
Chicago/Turabian StyleLima, Kleberson Meireles de, and Ramon Romankevicius Costa. 2022. "Cooperative-PHD Tracking Based on Distributed Sensors for Naval Surveillance Area" Sensors 22, no. 3: 729. https://doi.org/10.3390/s22030729
APA StyleLima, K. M. d., & Costa, R. R. (2022). Cooperative-PHD Tracking Based on Distributed Sensors for Naval Surveillance Area. Sensors, 22(3), 729. https://doi.org/10.3390/s22030729