
Low-Complexity Filter for Software-Defined Radio by Modulated Interpolated Coefficient Decimated Filter in a Hybrid Farrow



Abstract
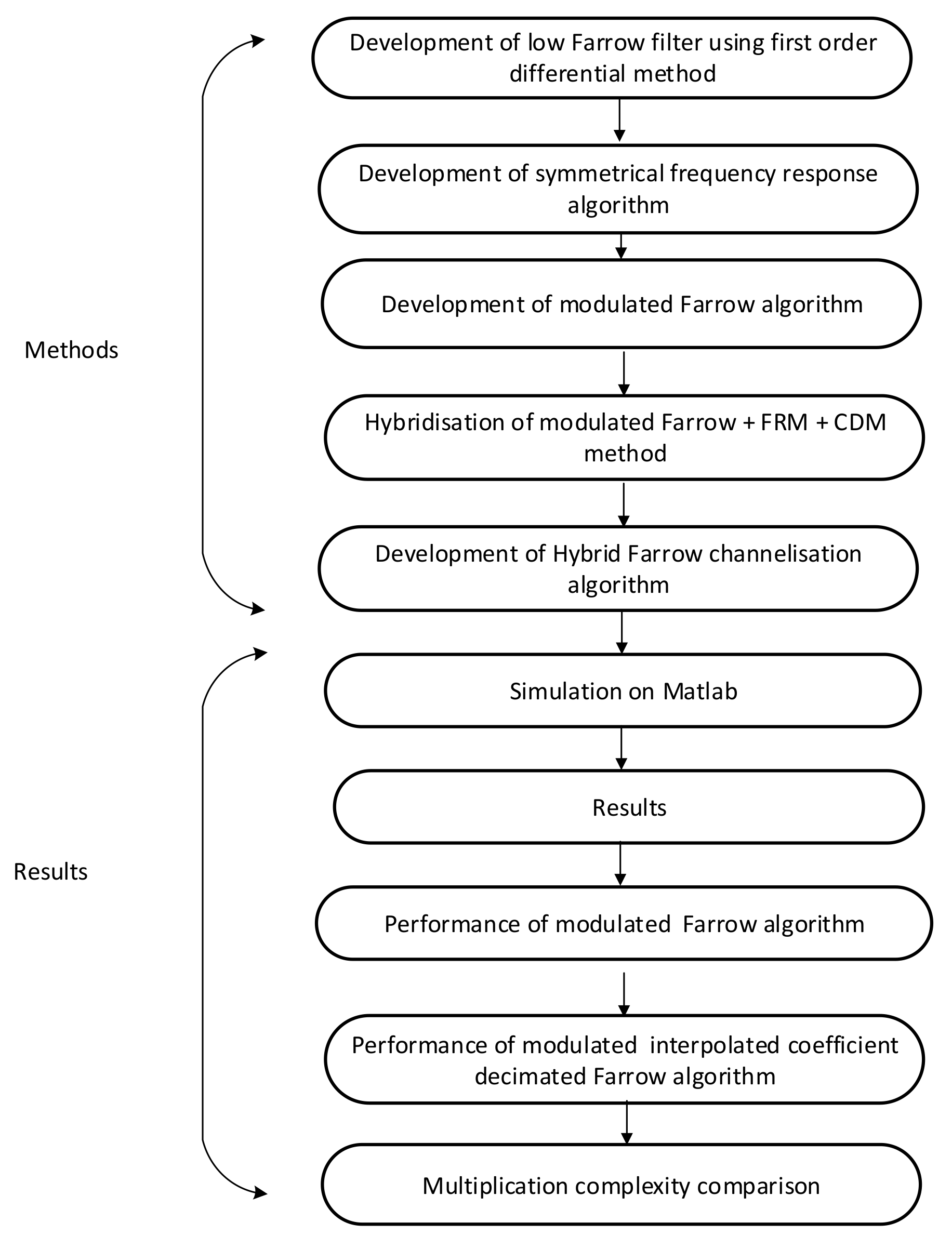
1. Introduction
- Development of a low Farrow filter using a first-order differential method;
- Development of symmetrical frequency responses;
- Development of a modulation Farrow filter;
- Hybridisation of a modulation Farrow with frequency response masking filter and interpolation coefficient decimation filter.
2. Hybrid Farrow Filter Derivation
- Development of low Farrow filter using first-order differential method;
- Development of symmetrical frequency responses;
- Development of modulation Farrow filter;
- Hybridisation of modulation Farrow with frequency response masking filter and interpolation coefficient decimation filter.
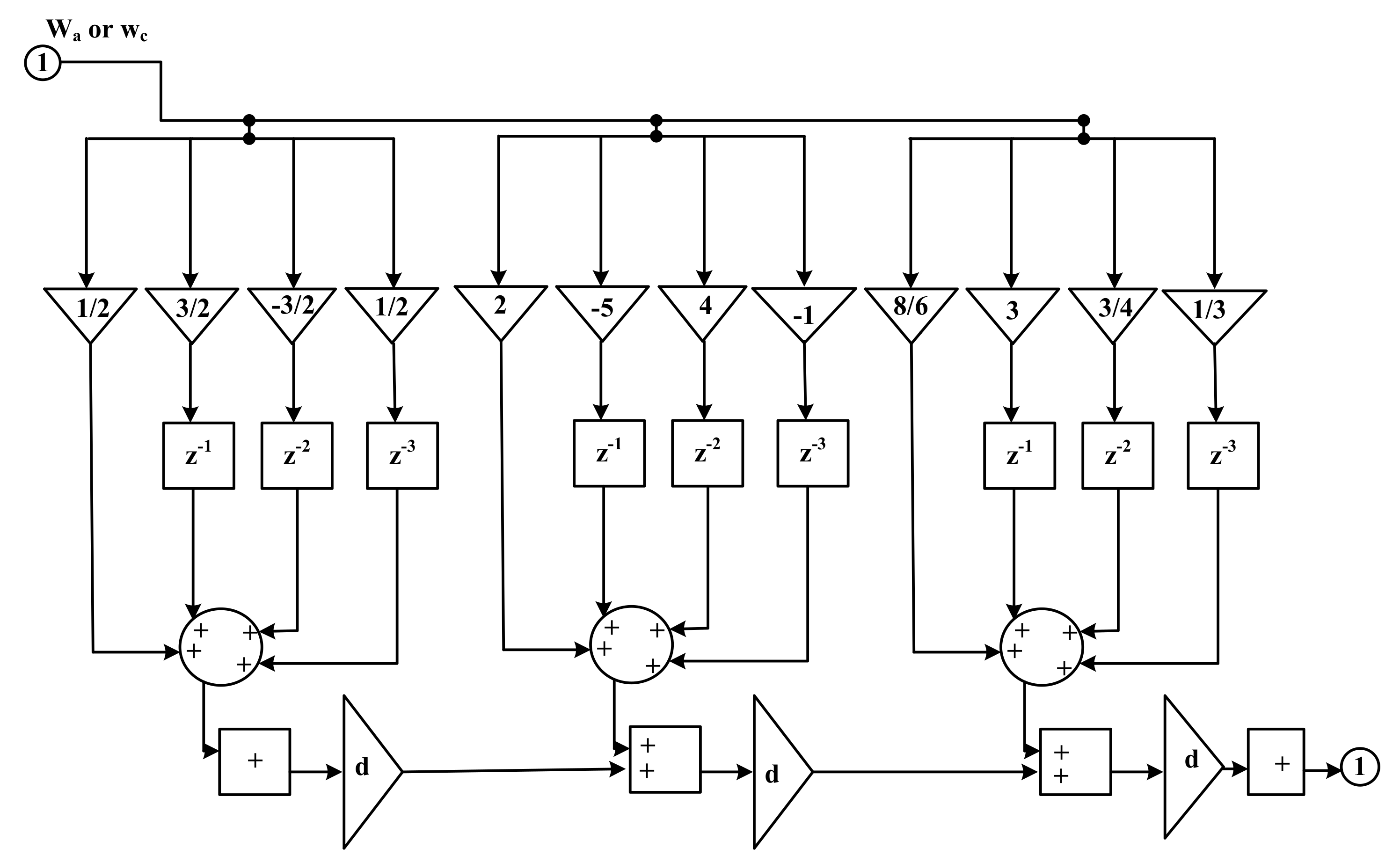
2.1. Farrow Interpolation Using First-Order Differential Approach
2.2. Exploring Frequency Responses of Symmetrical Farrow Filter Polynomial Functions
2.3. Modulation of Farrow Filter
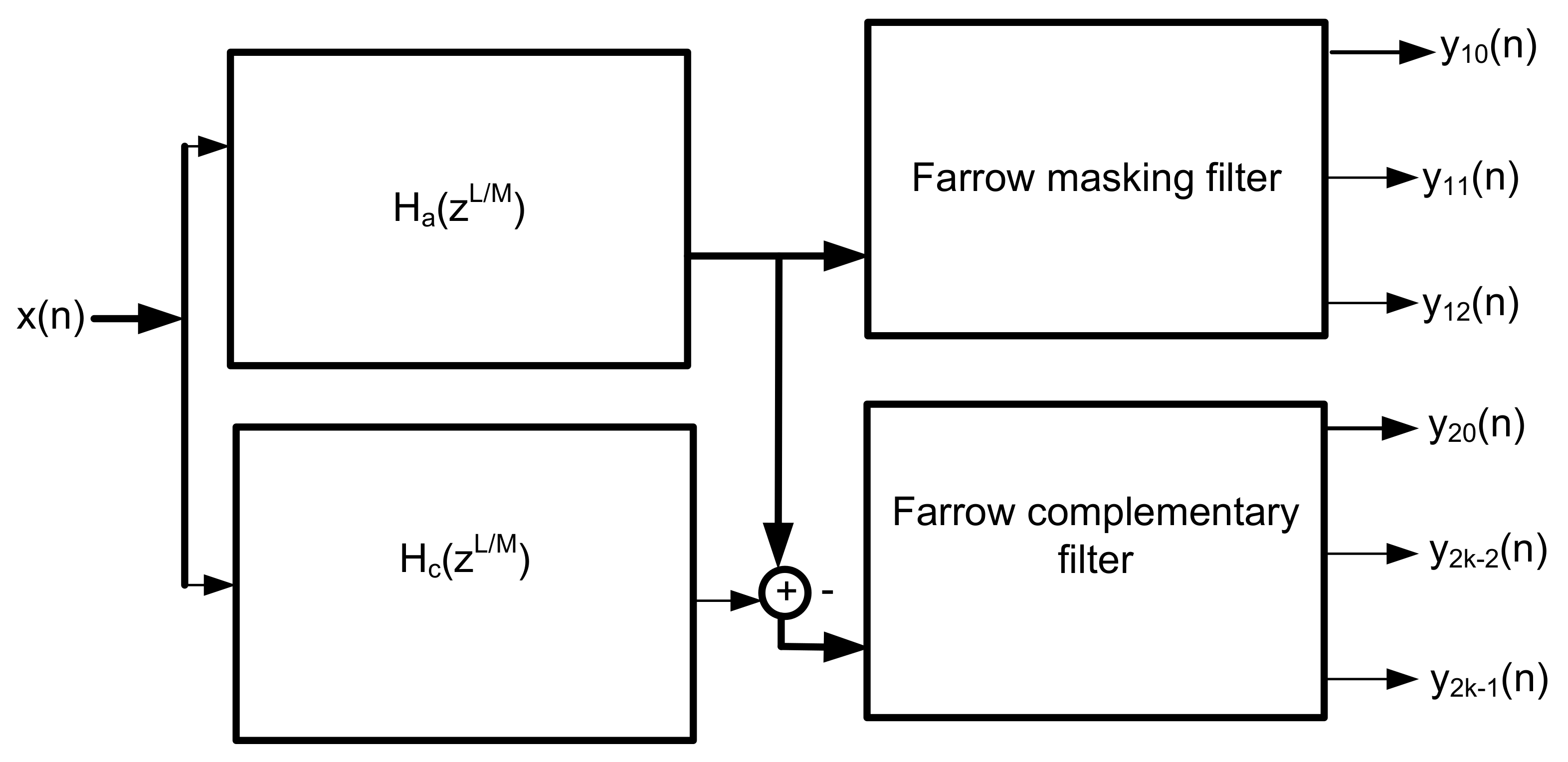
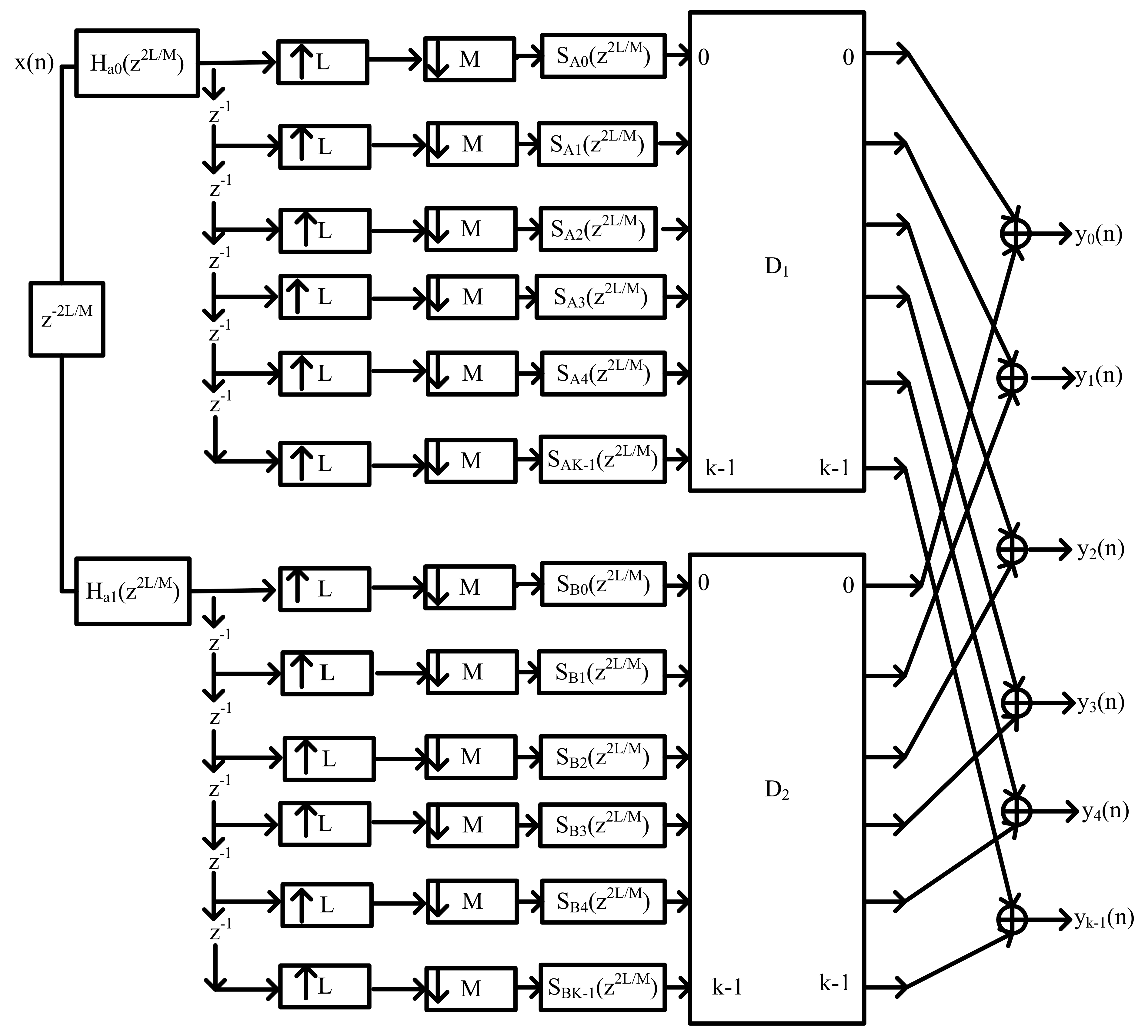
2.4. Combined Modulated Farrow and Interpolated Coefficient Decimated Filter
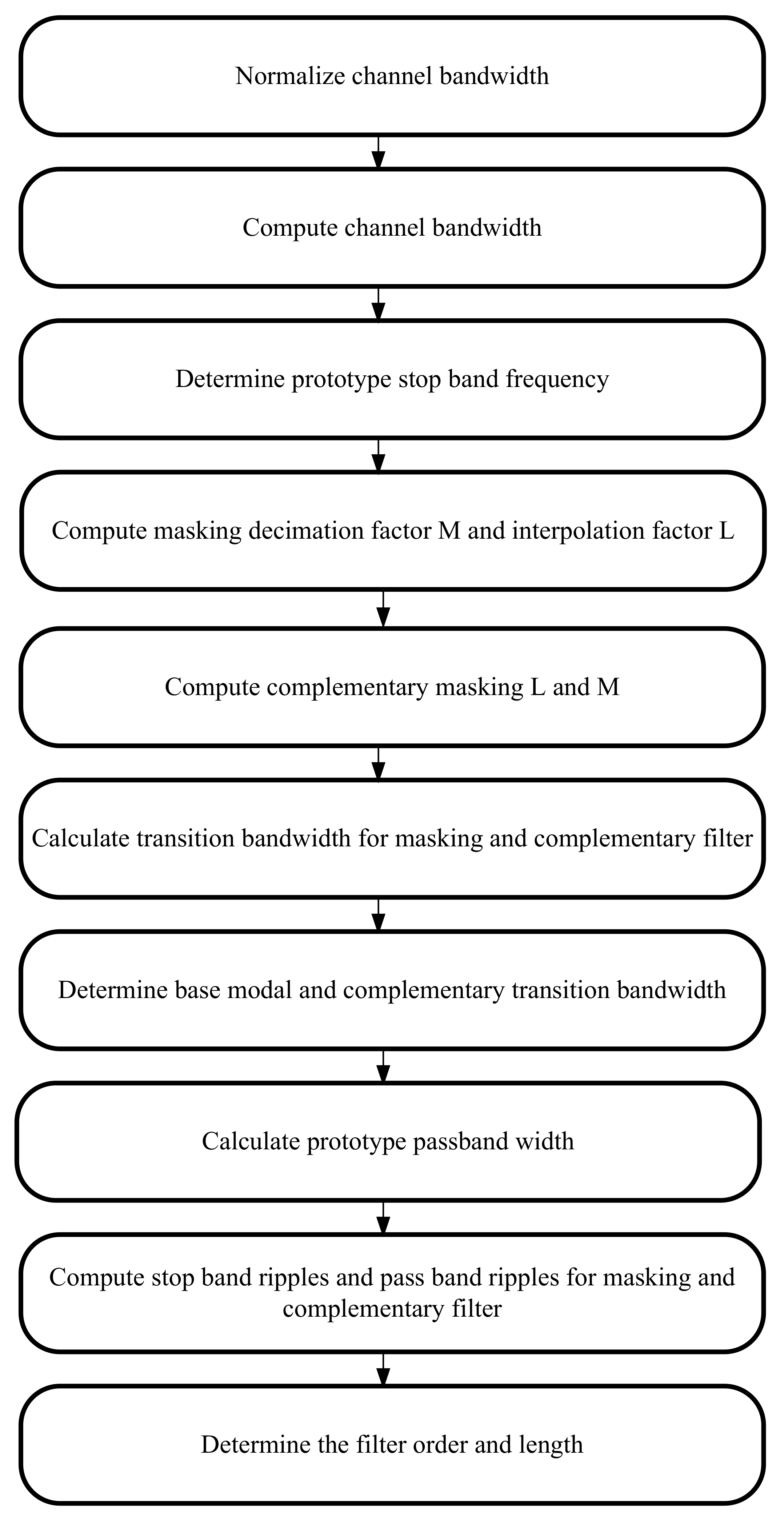
3. Hybrid Farrow Channelisation Algorithm
- Normalise all the channel bandwidths (Cs), such that the and transition bandwidth specifications range from 0 to 1; 1 corresponds to , where is the sampling frequency.
- Compute the channel stop band frequency, , such that , where is the channel bandwidth.
- Determine the prototype stop band frequency as, = where is the prototype stop band frequency and the procedure is to find the greatest common.
- The decimation factor M and the interpolation factor L of the filter are computed as follows, , . The value is computed using , where is the fractional delay rate of the filter.
- The decimation factor and the interpolation factor for the complementary filter are computed as follows: , . Thus, the fractional rate for complementary filter can be calculated thus: .
- Calculate the transition bandwidth for masking and complementary filter, using .
- Determine the base modal or complementary modal TBW as= min . This corresponds to the modal transition width.
- Calculate the prototype, masking and complementary passband width using.
- Compute the stop band ripple and passband peak ripple using and =min().
- Use the filter order −1 [37] to calculate the channel filter length for prototype, masking and complementary filter.
4. Simulations and Results
4.1. Performance of Modulation Farrow Algorithm
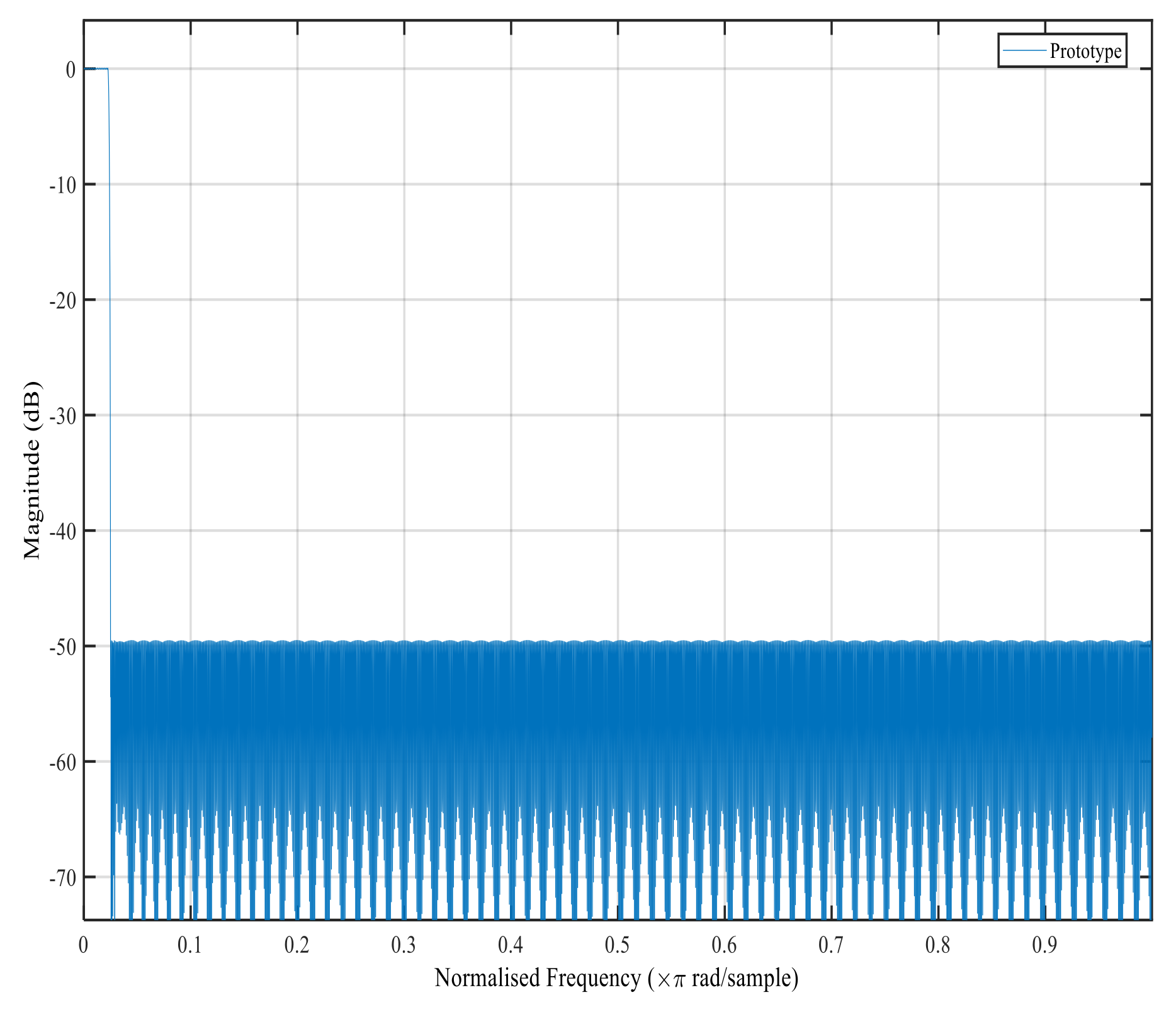
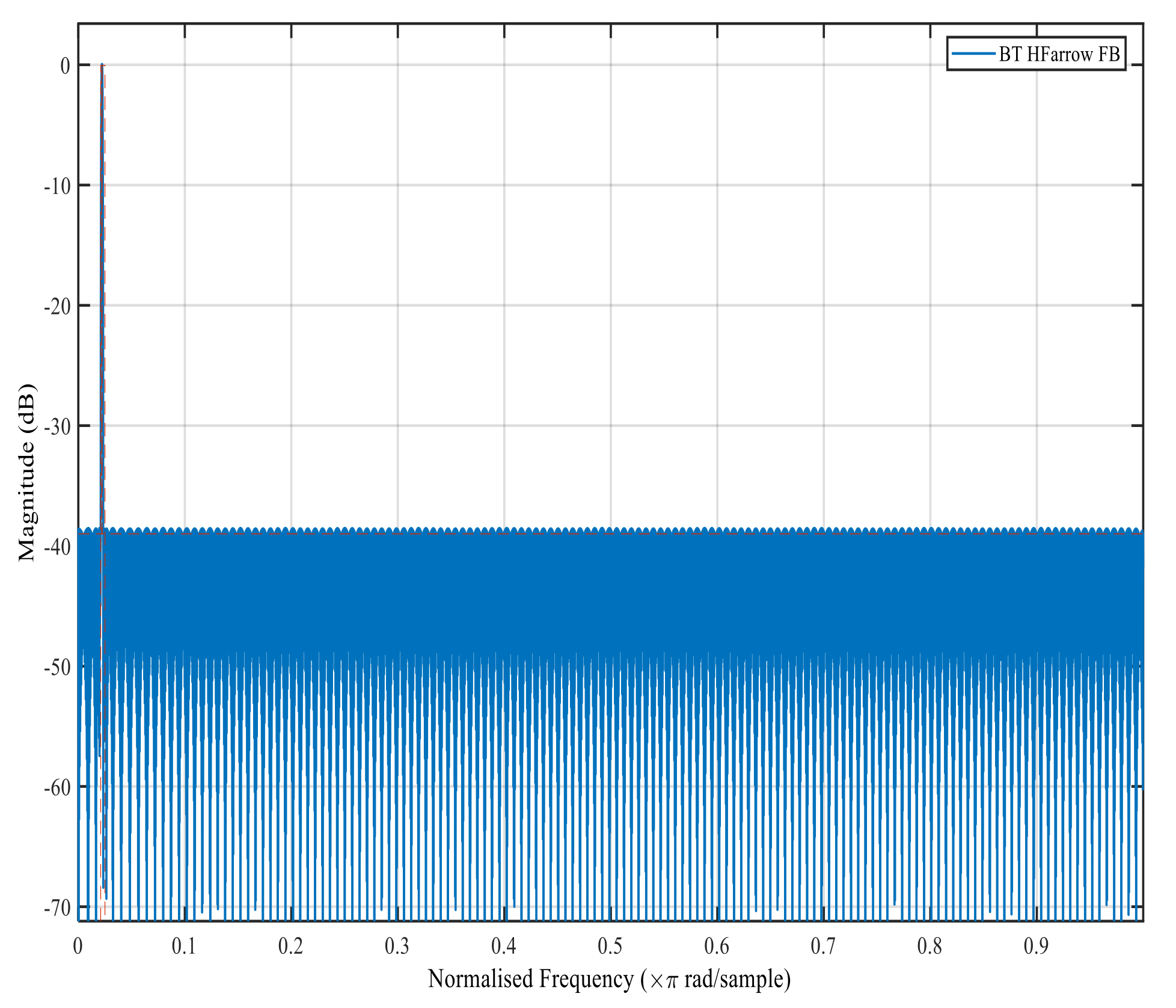
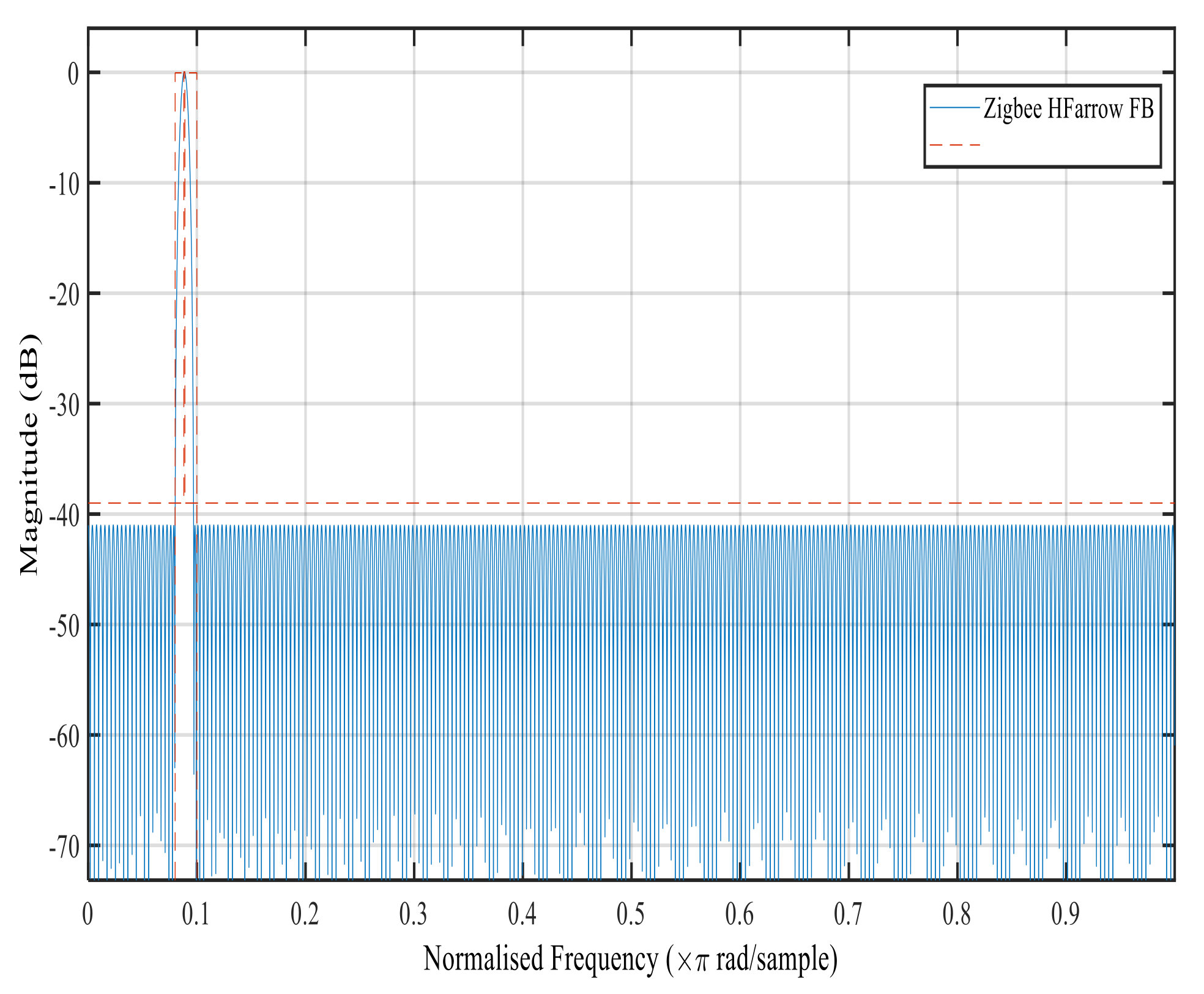
4.2. Performance of Modulated Interpolated Coefficient Decimated Farrow Algorithm
5. Conclusions
- The total number of multipliers used by the HFarrow filter bank were 389 while the ICDM expended 1545 multipliers, NU MDFFB consumed up to 1090 and CDFB used up to 1745.
- The total number of multipliers utilised by HFarrow channelisation was 22% of the total number of multipliers in the CDFB algorithm, while it depleted 25% of the total number of multipliers in ICDM.
- HFarrow showed reductions in the following: 78% in comparison with CDFB, 75% in comparison with ICDM and 63% in comparison with NU MDFT.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pandey, S.; Nemade, S. A Review of Discrete Hartley Transform Using Delay and Number of Slice Count. Int. J. Electron. Commun. Comput. Eng. 2017, 8, 88–91. [Google Scholar]
- Chiper, D.F. Radix-2 fast algorithm for computing discrete Hartley transform of type III. IEEE Trans. Circuits Syst. II Express Briefs 2012, 59, 297–301. [Google Scholar] [CrossRef]
- Otunniyi, T.O.; Myburgh, H.C. Improving Generalized Discrete Fourier Transform (GDFT) Filter Banks with Low-Complexity and Reconfigurable Hybrid Algorithm. Digital 2021, 1, 1. [Google Scholar] [CrossRef]
- Vellaisamy, S.; Elias, E. Low complexity reconfigurable channelizers using non-uniform filter banks. Comput. Electr. Eng. 2018, 68, 389–403. [Google Scholar]
- Laakso, T.; Valimaki, V.; Karjalainen, M.; Laine, U. Splitting the unit delay. IEEE Signal Process. Mag. 1996, 13, 30–60. [Google Scholar] [CrossRef]
- Johansson, H.; Lowenborg, P. On the design of adjustable fractional delay FIR filters. IEEE Trans. Circuits Syst. II Analog. Digit. Signal Process. 2003, 50, 164–169. [Google Scholar] [CrossRef]
- Johansson, H. Farrow-structure-based reconfigurable bandpass linear-phase FIR filters for integer sampling rate conversion. IEEE Trans. Circuits Syst. II Express Briefs 2011, 58, 46–50. [Google Scholar] [CrossRef][Green Version]
- Dhabu, S.; Prasad, V.A. Design of modified second-order frequency transformations based variable digital filters with large cutoff frequency range and improved transition band characteristics. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2015, 24, 413–420. [Google Scholar] [CrossRef]
- Sudharman, S.; Rajan, A.D.; Bindiya, T. Design of a Power-Efficient Low-Complexity Reconfigurable Non-maximally Decimated Filter Bank for High-Resolution Wideband Channels. Circuits Syst. Signal Process. 2019, 38, 2703–2735. [Google Scholar] [CrossRef]
- Ambede, A.; Smitha, K.; Vinod, A.P. Flexible low complexity uniform and nonuniform digital filter banks with high frequency resolution for multistandard radios. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2014, 23, 631–641. [Google Scholar] [CrossRef]
- Lovina, P.; Manjusha, K.A. SDR Applications using VLSI Design of Reconfigurable Devices. IJSRST 2018, 4, 1148–1153. [Google Scholar]
- Peng, X.; Li, J.; Zhou, X.; Lin, Q.; Chen, Z. Analysis and design of M-channel hybrid filter bank with digital calibration. IEEE Access 2018, 6, 24606–24616. [Google Scholar] [CrossRef]
- Devi, P.K.; Bhuvaneshwaran, R. FPGA implementation of coefficient decimated polyphase filter bank structure for multistandard communication receiver. J. Theor. Appl. Inf. Technol. 2014, 64, 298–306. [Google Scholar]
- Mahesh, R.; Vinod, A.P. Coefficient decimation approach for realizing reconfigurable finite impulse response filters. In Proceedings of the 2008 IEEE International Symposium on Circuits and Systems, Seattle, WA, USA, 18–21 May 2008; pp. 81–84. [Google Scholar]
- Palomo-Navarro, Á.; Farrell, R.J.; Villing, R. Combined FRM and GDFT filter bank designs for improved nonuniform DSA channelisation. Wirel. Commun. Mob. Comput. 2016, 16, 1440–1456. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, C.; Zhao, Z.; Liu, F.; Chen, T. Low-complexity channelizer based on FRM for passive radar multi-channel wideband receiver. Circuits Syst. Signal Process. 2020, 39, 420–438. [Google Scholar] [CrossRef]
- Cruz Garrido, F.; Torres Gómez, J. FPGA design of a Time-Variant Coefficient Filter. Ing. Electrón. Autom. Comun. 2020, 41, 51–62. [Google Scholar]
- Mahesh, R.; Vinod, A.P.; Lai, E.M.; Omondi, A. Filter bank channelizers for multi-standard software defined radio receivers. J. Signal Process. Syst. 2011, 62, 157–171. [Google Scholar] [CrossRef]
- Haridas, N.; Elias, E. Reconfigurable farrow structure-based frm filters for wireless communication systems. Circuits Syst. Signal Process. 2017, 36, 315–338. [Google Scholar] [CrossRef]
- Parvathi, A.; Sakthivel, V. Low complexity reconfigurable modified FRM architecture with full spectral utilization for efficient channelizers. Eng. Sci. Technol. Int. J. 2021, in press. [Google Scholar] [CrossRef]
- Roy, S.; Chandra, A. A Survey of FIR Filter Design Techniques: Low-complexity, Narrow Transition-band and Variable Bandwidth. Integration 2021, 77, 193–204. [Google Scholar] [CrossRef]
- Agrawal, N.; Ambede, A.; Darak, S.; Vinod, A.; Madhukumar, A. Design and Implementation of Low Complexity Reconfigurable Filtered-OFDM based LDACS. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 2399–2403. [Google Scholar] [CrossRef]
- Zhao, R.; Lai, X.; Tay, D.B.; Lin, Z. An alternating variable technique for the constrained minimax design of frequency-response-masking filters. Circuits Syst. Signal Process. 2019, 38, 827–846. [Google Scholar] [CrossRef]
- Li, J.; Luo, D.; Liu, Y.; Zhu, Y.; Li, Z.; Cui, G.; Tang, W.; Chen, W. Densely Connected Multi-Stage Model with Channel Wise Subband Feature for Real-Time Speech Enhancement. In Proceedings of the ICASSP 2021—2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 6–11 June 2021; pp. 6638–6642. [Google Scholar]
- Park, C.S.; Kim, S.; Wang, J.; Park, S. Design and Implementation of a Farrow-Interpolator-Based Digital Front-End in LTE Receivers for Carrier Aggregation. Electronics 2021, 10, 231. [Google Scholar] [CrossRef]
- Devis, T.; Manuel, M. A low-complexity 3-level filter bank design for effective restoration of audibility in digital hearing aids. Biomed. Eng. Lett. 2020, 10, 593–601. [Google Scholar] [CrossRef] [PubMed]
- Srinivasa Reddy, K.; Sahoo, S.K. An approach for fixed coefficient RNS-based FIR filter. Int. J. Electron. 2017, 104, 1358–1376. [Google Scholar] [CrossRef]
- Alrmah, M.A.; Weiss, S. Filter bank based fractional delay filter implementation for widely accurate broadband steering vectors. In Proceedings of the 2013 5th IEEE International Workshop on Computational Advances in Multi-Sensor Adaptive Processing (CAMSAP), St. Martin, France, 15–18 December 2013; pp. 332–335. [Google Scholar]
- Mgawe, B.; Mwangi, E. A Digital Filter Bank based on a Hybrid Modified Improved Coefficient Decimation Method for Cognitive Radio Application. Int. J. Eng. Res. Technol. 2019, 12, 530–534. [Google Scholar]
- Rajalakshmi, K.; Gondi, S.; Kandaswamy, A. A fractional delay FIR filter based on Lagrange interpolation of Farrow structure. Int. J. Elect. Electron. Eng. 2012, 1, 103–107. [Google Scholar] [CrossRef]
- Ambede, A.; Shreejith, S.; Vinod, A.P.; Fahmy, S.A. Design and realization of variable digital filters for software-defined radio channelizers using an improved coefficient decimation method. IEEE Trans. Circuits Syst. II Express Briefs 2016, 63, 59–63. [Google Scholar] [CrossRef]
- Kalathil, S.; Elias, E. Non-uniform cosine modulated filter banks using meta-heuristic algorithms in CSD space. J. Adv. Res. 2015, 6, 839–849. [Google Scholar] [CrossRef] [PubMed]
- Blok, M. Fractional delay filter design for sample rate conversion. In Proceedings of the Computer Science and Information Systems (FedCSIS), Wroclaw, Poland, 9–12 September 2012; pp. 701–706. [Google Scholar]
- Crochiere, R.E.; Rabiner, L.R. Multirate Digital Signal Processing, 1983; Pretice Hall: Hoboken, NJ, USA, 1987; pp. 127–192. [Google Scholar]
- Tony, R.J. RF and Digital Signal Processing for Software-Defined Radio,2008; Elsevier Science and Technology: Oxford, UK, 2008. [Google Scholar]
- Omondi, A.R.; Premkumar, B. Residue Number Systems: Theory and Implementation; World Scientific: Singapore, 2007; Volume 2. [Google Scholar]
- Bellanger, M. On computational complexity in digital filters. In Proceedings of the European Conference on Circuit Theory and Design, The Hague, The Netherlands, 25–28 August 1981; pp. 58–63. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channelisation Algorithm | Computational Load |
|---|---|
| Modified Farrow [5] | Very High |
| Transposed modified Farrow [6,7] | High |
| Coefficient decimation type 1 [9,11,12,18] | Medium |
| Coefficient decimation type 11 [9,11,12,18] | High |
| MCD 1 and 11 [9,10,11,12] | Low |
| ICDM 1 and II [31] | Low |
| Interpolation FRM [20] | Very Low |
| CDM + interpolation FRM [20] | Low |
| ICDM [17,31] | Very High |
| Interpolation + Farrow structure [30] | Very High |
| Cosine modulated filter bank [3,32] | Low |
| FRM [15,31] | High |
| FRM on tree structure NUFB [9] | High |
| FRM NU MDFT [4,9] | High |
| HMICDM [29] | High |
| Filter Bank | m | M | Stop Band Frequency () | Passband Frequency () | Passband Ripples () | Stop Band Attenuation () | Filter Length |
|---|---|---|---|---|---|---|---|
| Modal filter, | 2 | 40 | 0.025 | 0.0225 | 0.9877 | 56.9 | 205 |
| Bluetooth, | 2 | 40 | 0.025 | 0.0225 | 0.998 | 43.9 | 189 |
| Zigbee, | 2 | 10 | 0.1 | 0.09 | 0.989 | 41.22 | 98 |
| WCDMA, | 2 | 8 | 0.2 | 0.175 | 0.997 | 56 | 72 |
| Filter Bank | Stop Band Frequency () | Passband Frequency () | Passband Ripples () | Stop Band Attenuation () | Weight | Weight | Filter Length |
|---|---|---|---|---|---|---|---|
| Modal filter, | 0.025 | 0.0225 | 0.998 | −58 | 10 | 39 | 240 |
| Bluetooth, | 0.025 | 0.0225 | 0.998 | −58 | 10 | 39 | 240 |
| Zigbee, | 0.1 | 0.09 | 0.989 | −62 | 10 | 39 | 120 |
| WCDMA, | 0.2 | 0.175 | 0.987 | −68 | 10 | 670 | 90 |
| Filter Bank | Stop band Frequency () | Passband Frequency () | Passband Ripples () | Stop band Attenuation () | Filter Length | |
|---|---|---|---|---|---|---|
| Modal filter, | 0.025 | 0.022625 | 0.1 | 50 | 132 | |
| Bluetooth, | 0.025 | 0.0224 | 0.0975 | −39 | 107 | |
| Zigbee, | 0.1 | 0.089 | 0.09 | −39 | 24 | |
| WCDMA, | 0.2 | 0.125 | 0.0875 | −48.25 | 9 |
| Filter Bank | Stop band Frequency () | Passband Frequency () | Passband Ripples () | Stop band Attenuation () | Filter Length | |
|---|---|---|---|---|---|---|
| Modal filter | 0.027307 | 0.02269 | 0.1 | −50 | 147 | |
| Bluetooth | 0.027307 | 0.02269 | 0.092 | −36.92 | 134 | |
| Zigbee | 0.1080 | 0.0911 | 0.088 | −35.5 | 29 | |
| WCDMA | 0.2 | 0.125 | 0.0875 | −48.25 | 9 |
| Filter Bank | Filter Order | Total Number of Multiplications | ||
|---|---|---|---|---|
| Modal filter | 279 | - | - | 187 |
| BT | - | 107 | 134 | 156 |
| Zigbee | - | 24 | 29 | 37 |
| WCDMA | - | 9 | 9 | 9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Otunniyi, T.O.; Myburgh, H.C. Low-Complexity Filter for Software-Defined Radio by Modulated Interpolated Coefficient Decimated Filter in a Hybrid Farrow. Sensors 2022, 22, 1164. https://doi.org/10.3390/s22031164
Otunniyi TO, Myburgh HC. Low-Complexity Filter for Software-Defined Radio by Modulated Interpolated Coefficient Decimated Filter in a Hybrid Farrow. Sensors. 2022; 22(3):1164. https://doi.org/10.3390/s22031164
Chicago/Turabian StyleOtunniyi, Temidayo O., and Hermanus C. Myburgh. 2022. "Low-Complexity Filter for Software-Defined Radio by Modulated Interpolated Coefficient Decimated Filter in a Hybrid Farrow" Sensors 22, no. 3: 1164. https://doi.org/10.3390/s22031164
APA StyleOtunniyi, T. O., & Myburgh, H. C. (2022). Low-Complexity Filter for Software-Defined Radio by Modulated Interpolated Coefficient Decimated Filter in a Hybrid Farrow. Sensors, 22(3), 1164. https://doi.org/10.3390/s22031164