
Quantitative Evaluation for Magnetoelectric Sensor Systems in Biomagnetic Diagnostics

 , , , , ,
, , , , ,  ,
,  ,
,  , and
, and 
Abstract
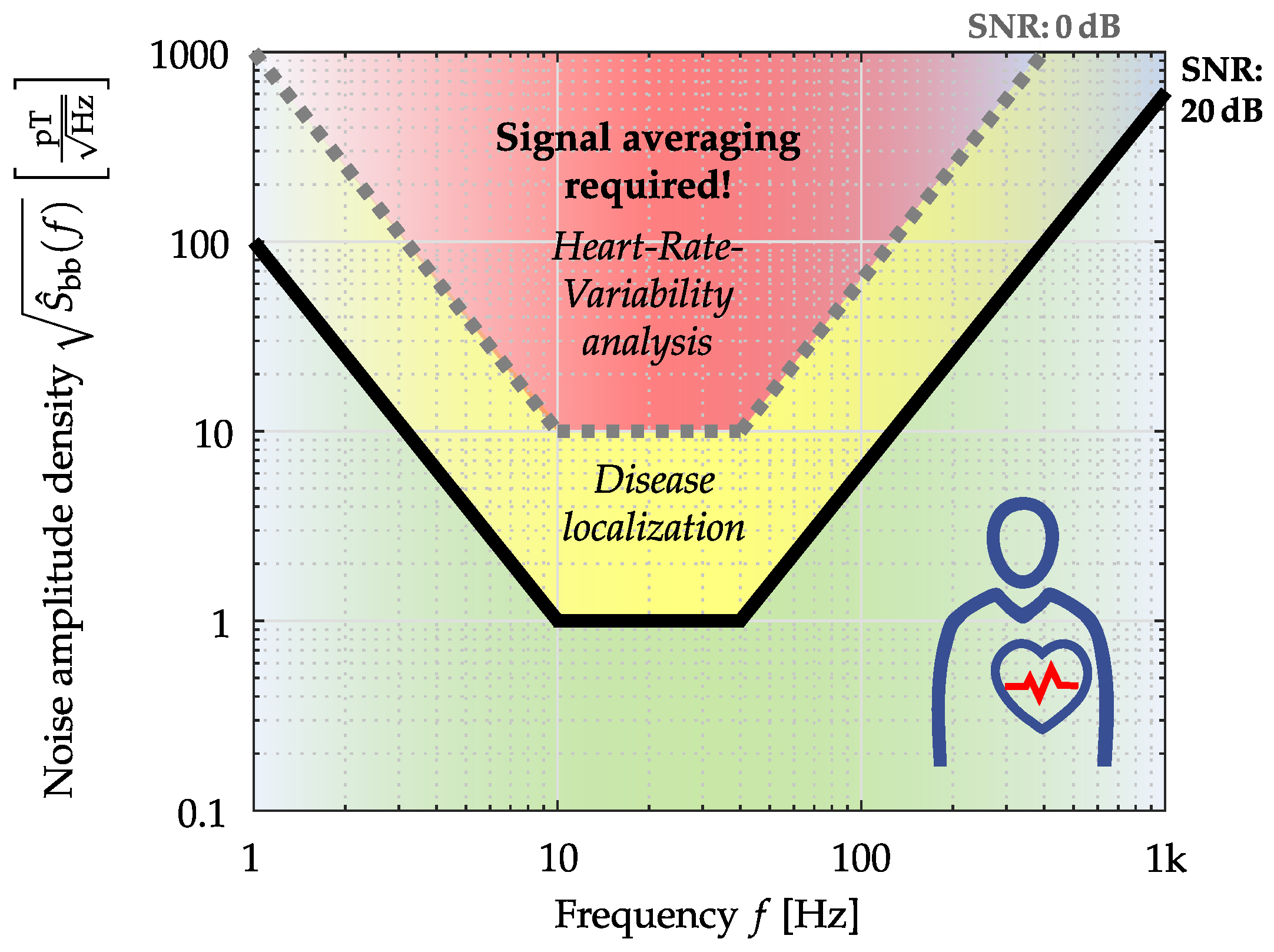
:1. Introduction
2. Evaluation Metrics for Magnetoelectric Sensor Systems
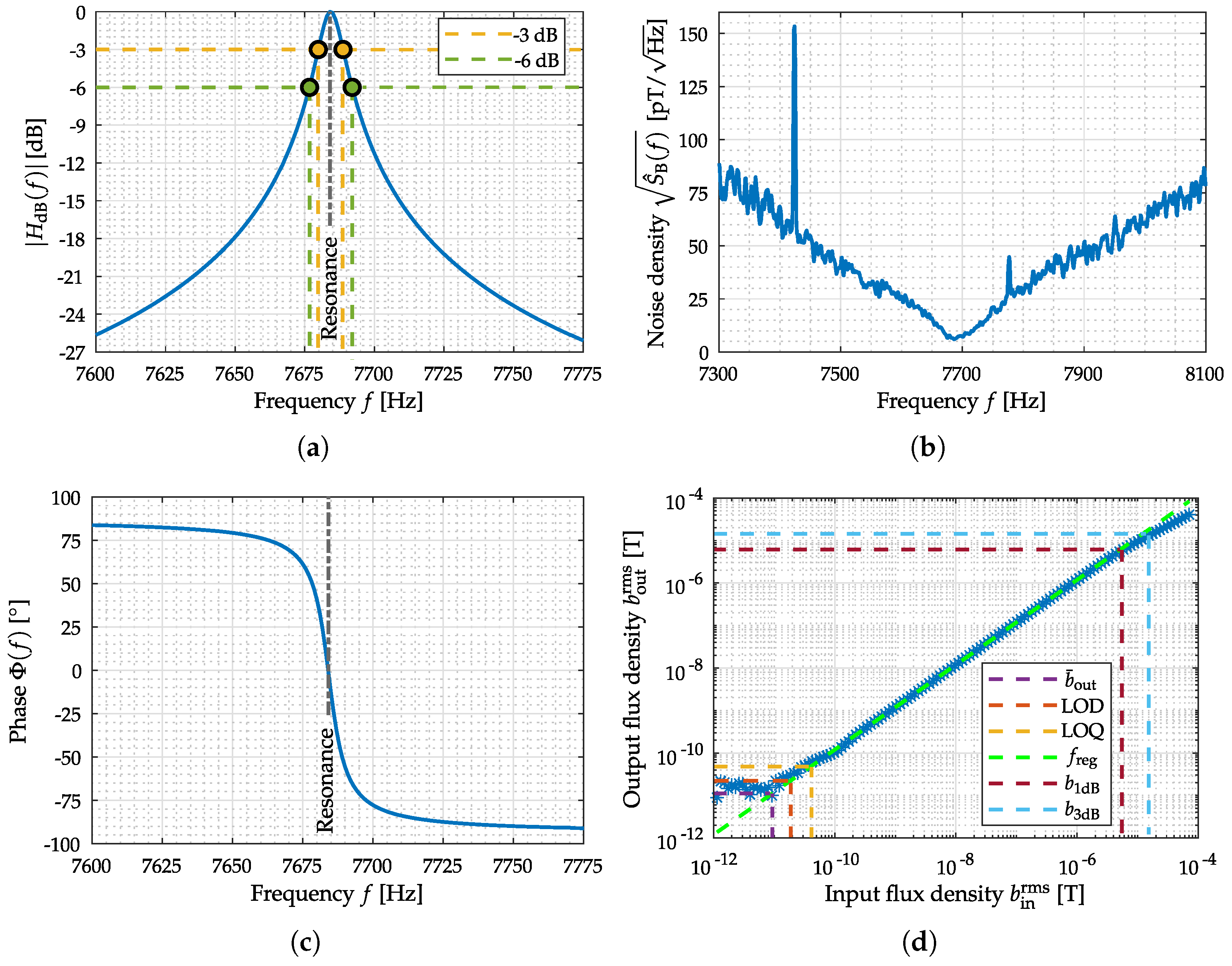
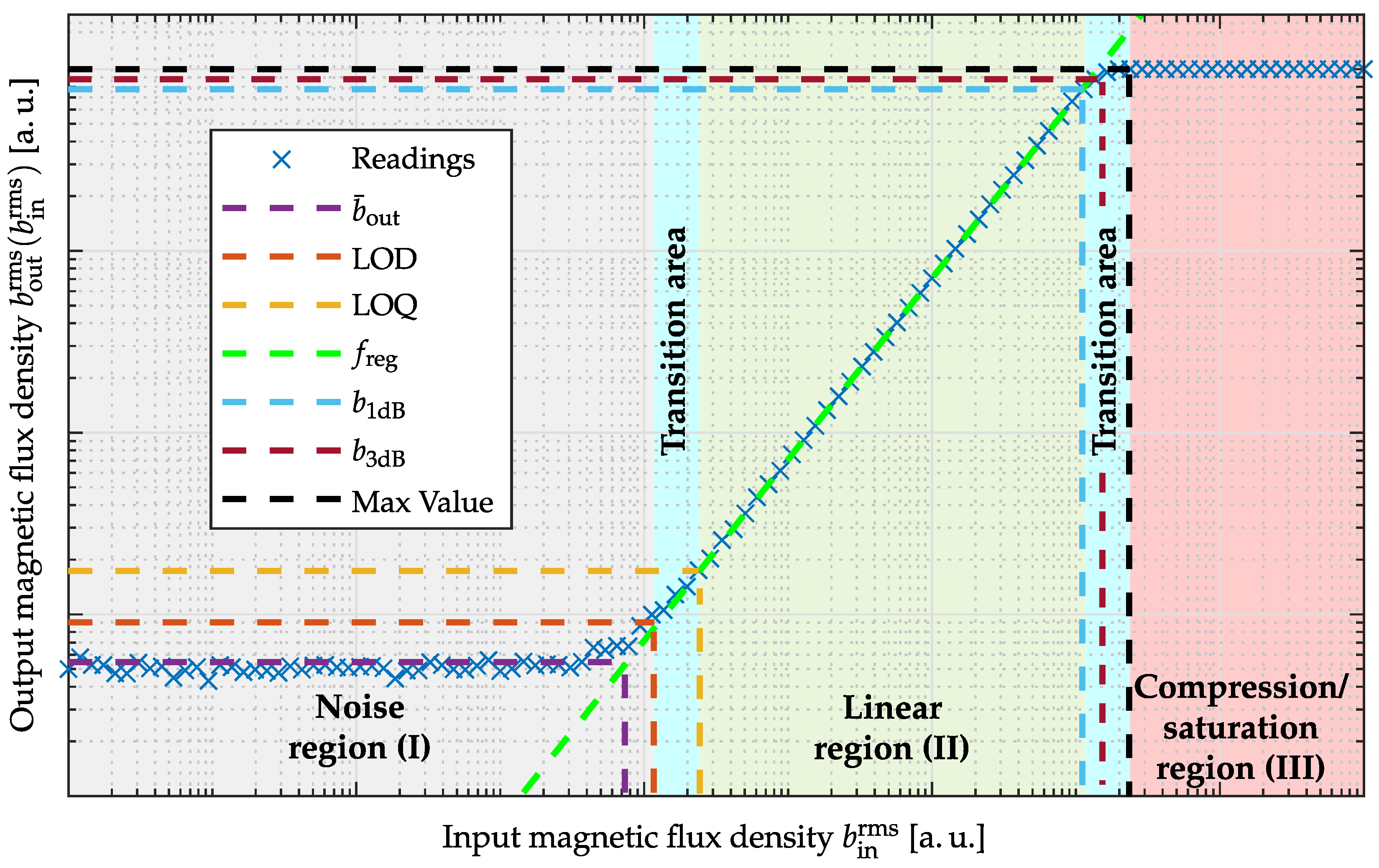
2.1. Input–Output–Amplitude–Relation
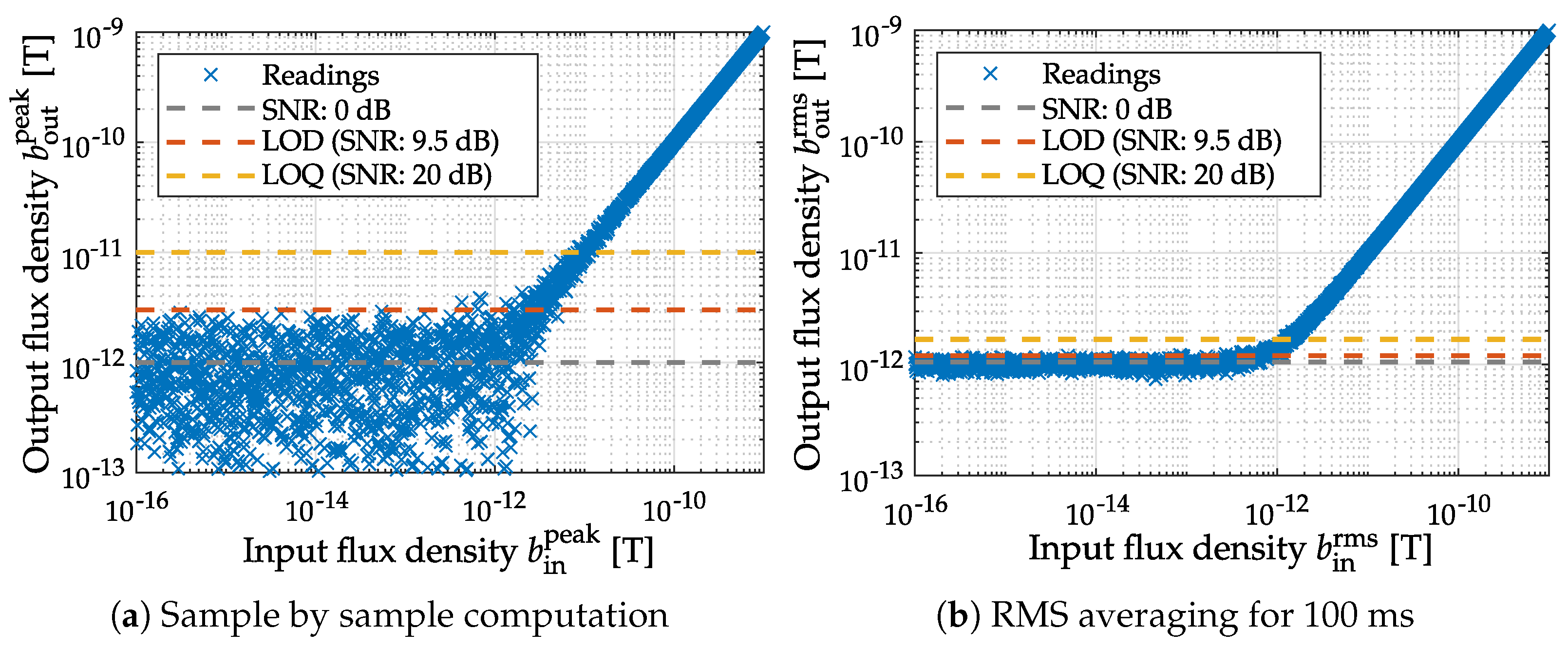
2.1.1. Limit-of-Detection
2.1.2. Limit-of-Quantification
2.1.3. Linear Region
2.1.4. 1-dB-Compression-Point and 3-dB-Compression-Point
2.1.5. Dynamic Range
2.1.6. Determination of the Input–Output–Amplitude–Relation
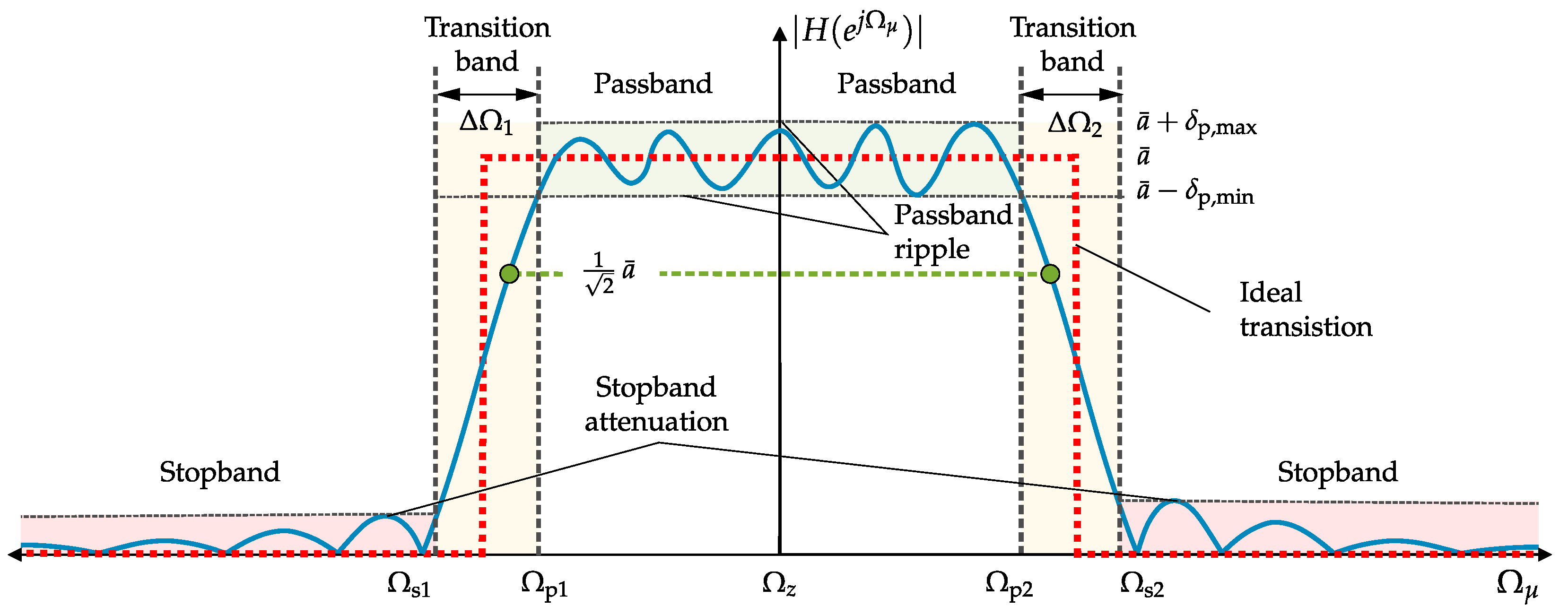
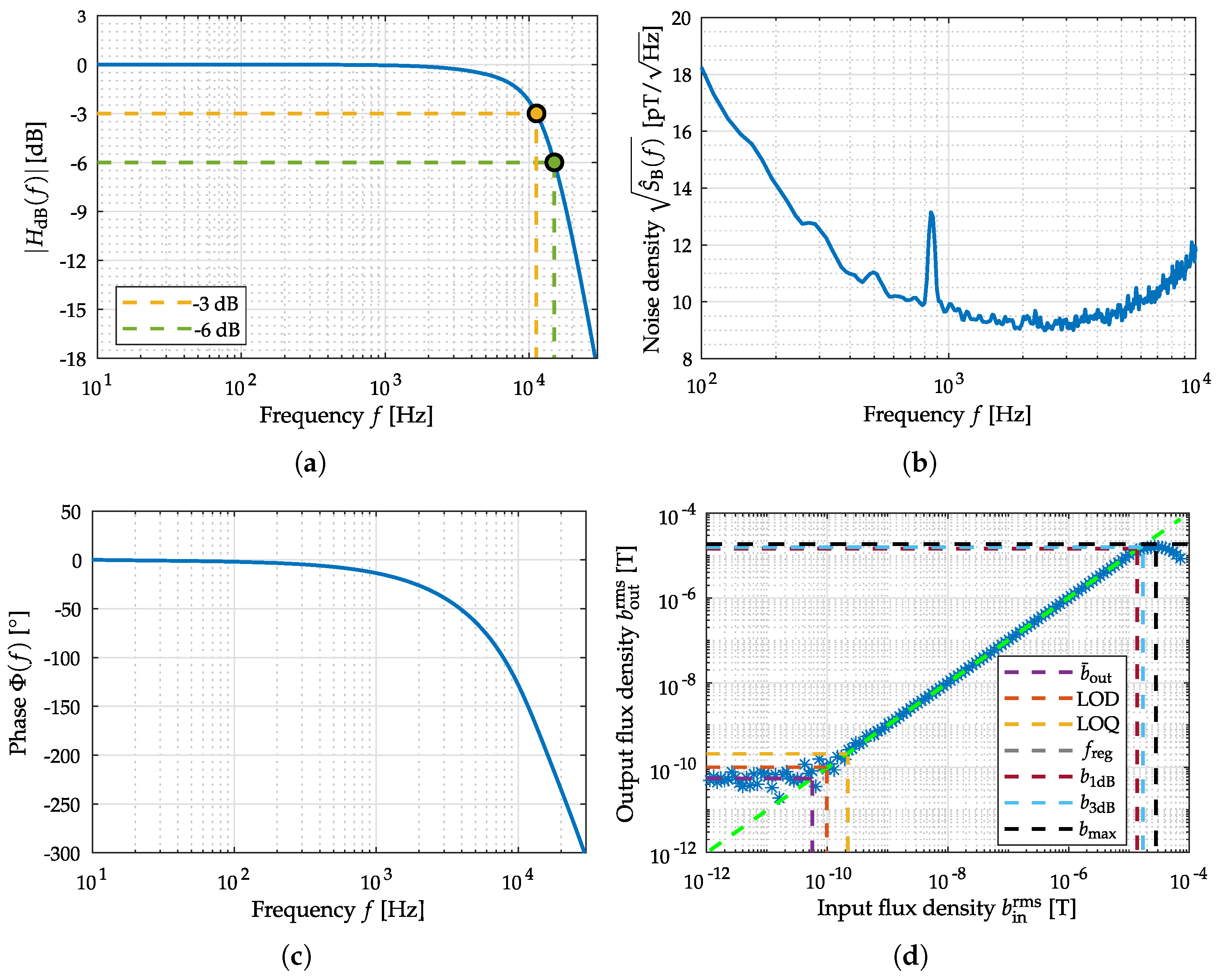
2.2. Frequency Response (Magnitude and Phase Response)

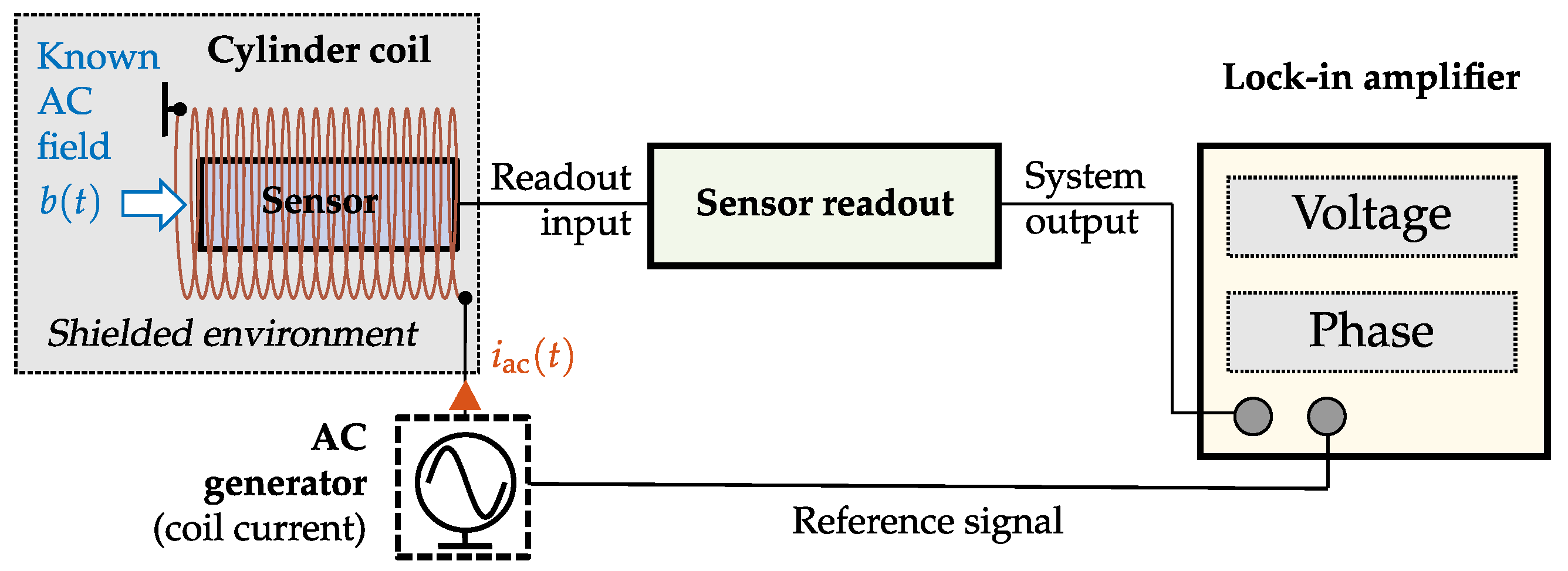
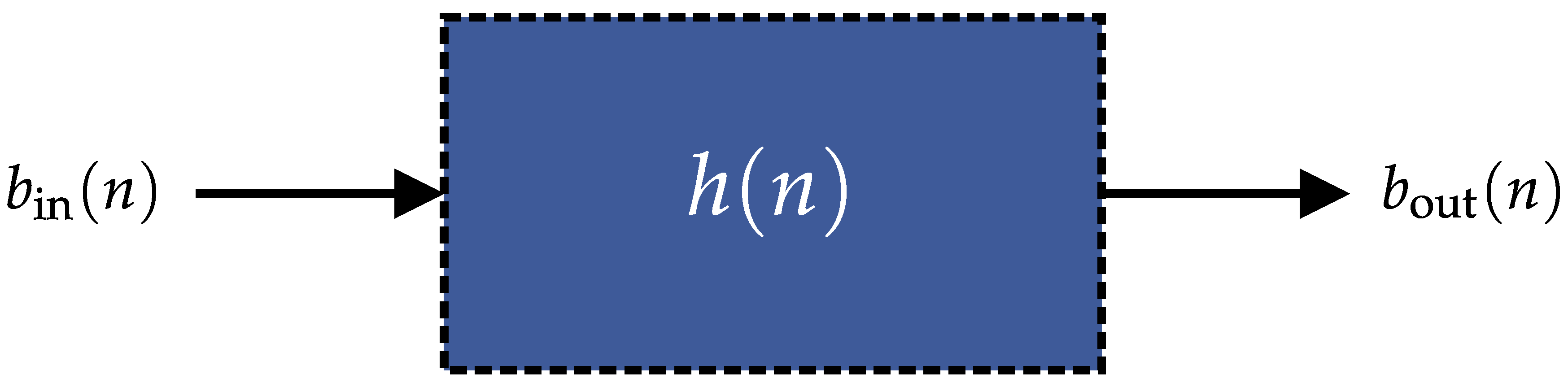
 abbreviates a Fourier transform for discrete signals in the one direction and its inverse counterpart in the other. The frequency response of the system significantly influences the signal characteristics. Therefore, is of particular interest for the determination of the transfer characteristic of a sensor system, because a system impact on the magnitude and phase exists and must be considered for any application [27]. A commonly used approach for frequency response estimation can be performed by exciting the sensor system in the steady-state (transient effects are no longer present in the system) with a sinusoidal alternating magnetic field. A successive excitation with different discrete angular frequencies with in the frequency range of interest enables estimation of the absolute magnitude of (amplitude response) represented by
abbreviates a Fourier transform for discrete signals in the one direction and its inverse counterpart in the other. The frequency response of the system significantly influences the signal characteristics. Therefore, is of particular interest for the determination of the transfer characteristic of a sensor system, because a system impact on the magnitude and phase exists and must be considered for any application [27]. A commonly used approach for frequency response estimation can be performed by exciting the sensor system in the steady-state (transient effects are no longer present in the system) with a sinusoidal alternating magnetic field. A successive excitation with different discrete angular frequencies with in the frequency range of interest enables estimation of the absolute magnitude of (amplitude response) represented by
- Mean Passband Amplitude
- Passband Ripple
- Passband Edge Frequencies
- Stopband Edge Frequencies
- Transition Bands
- −3 dB Angular Frequencies, Bandwidth
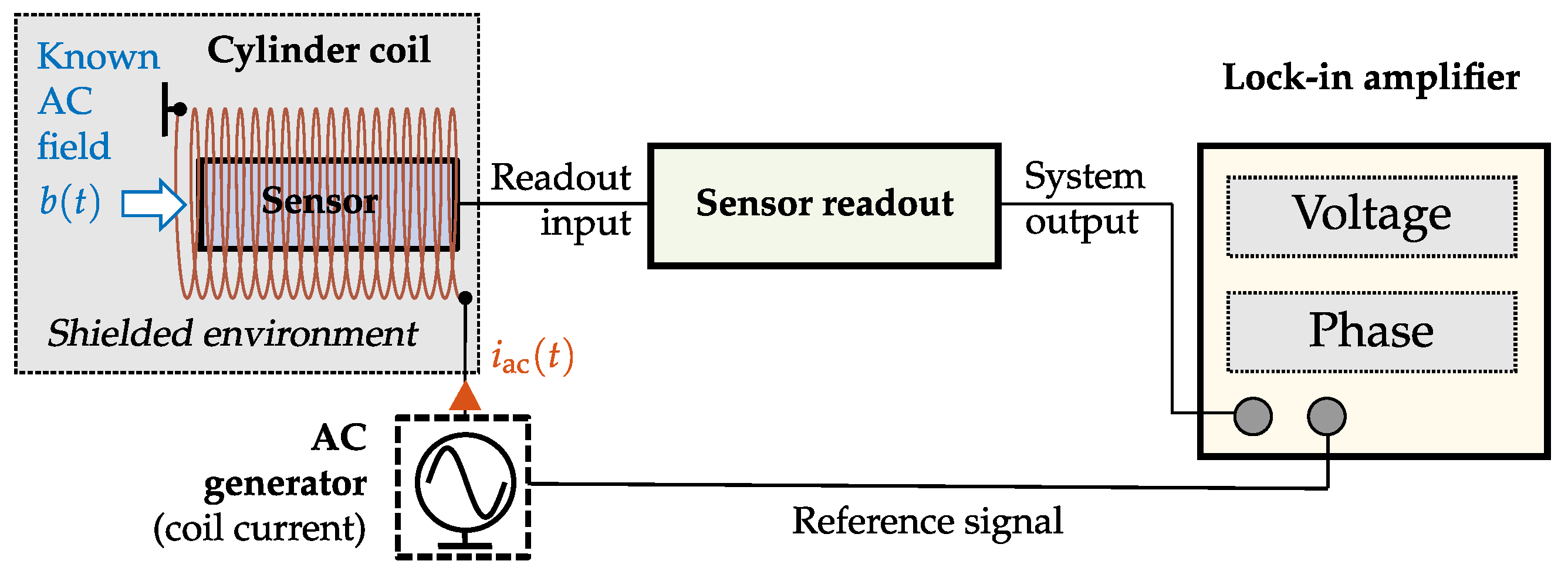
Frequency Response Determination
3. Figures of Merit for Sensor Signal Evaluation
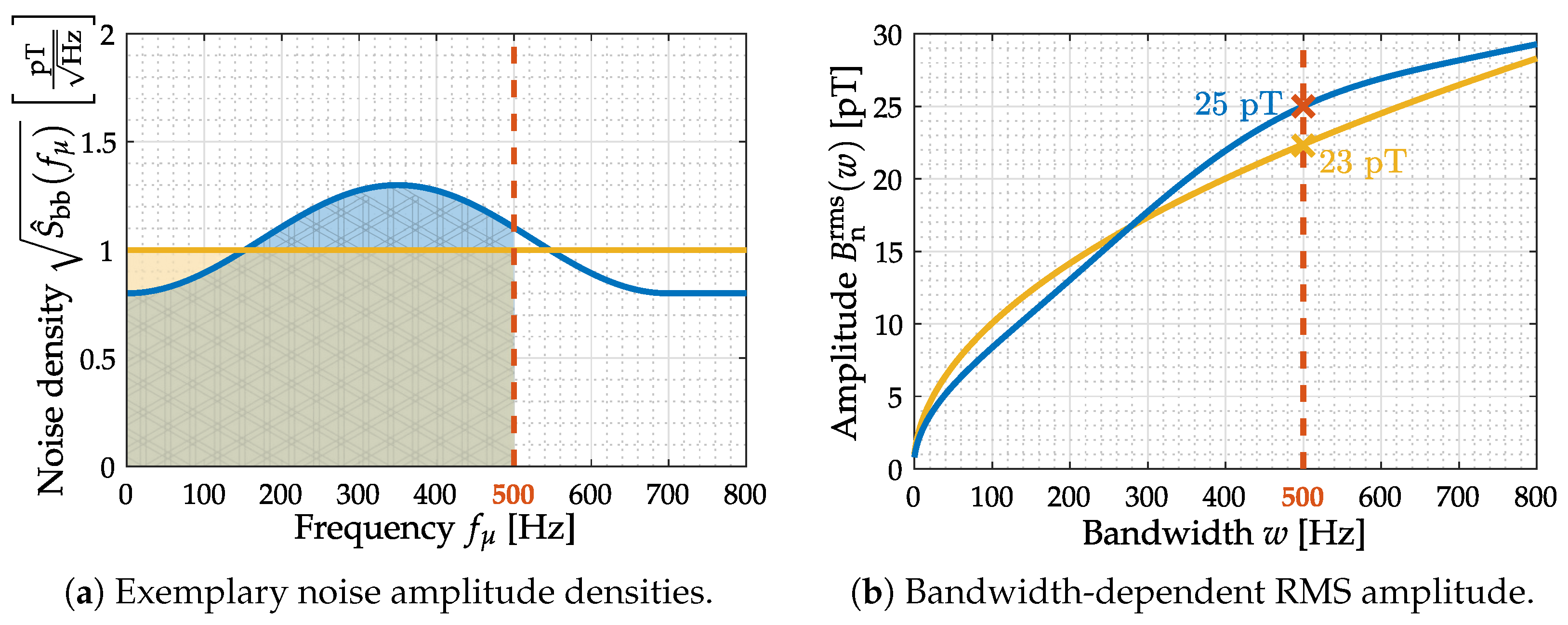
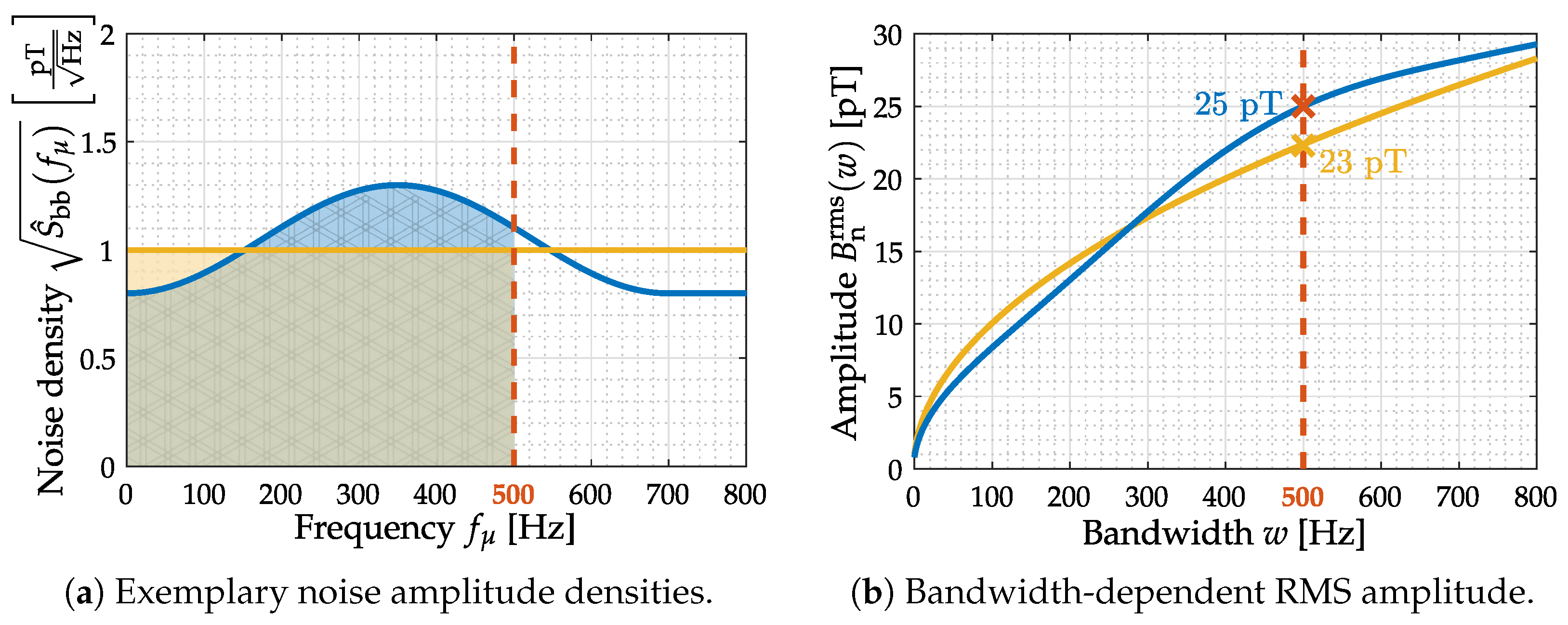
3.1. System Noise
Measurement
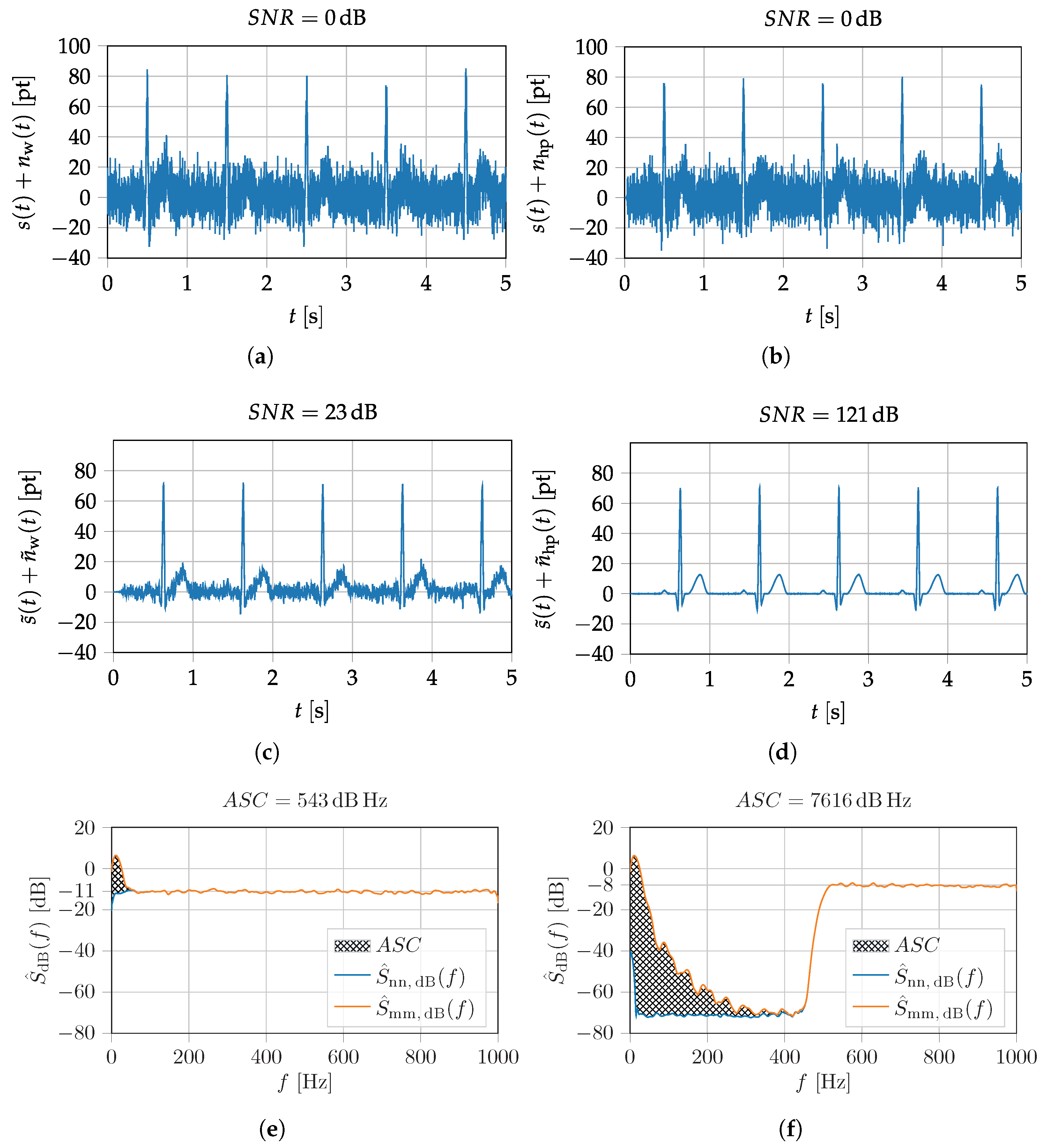
3.2. Signal-to-Noise Ratio


3.3. Application Specific Capacity
4. Exemplary Evaluation of Magnetoelectric Sensor Systems
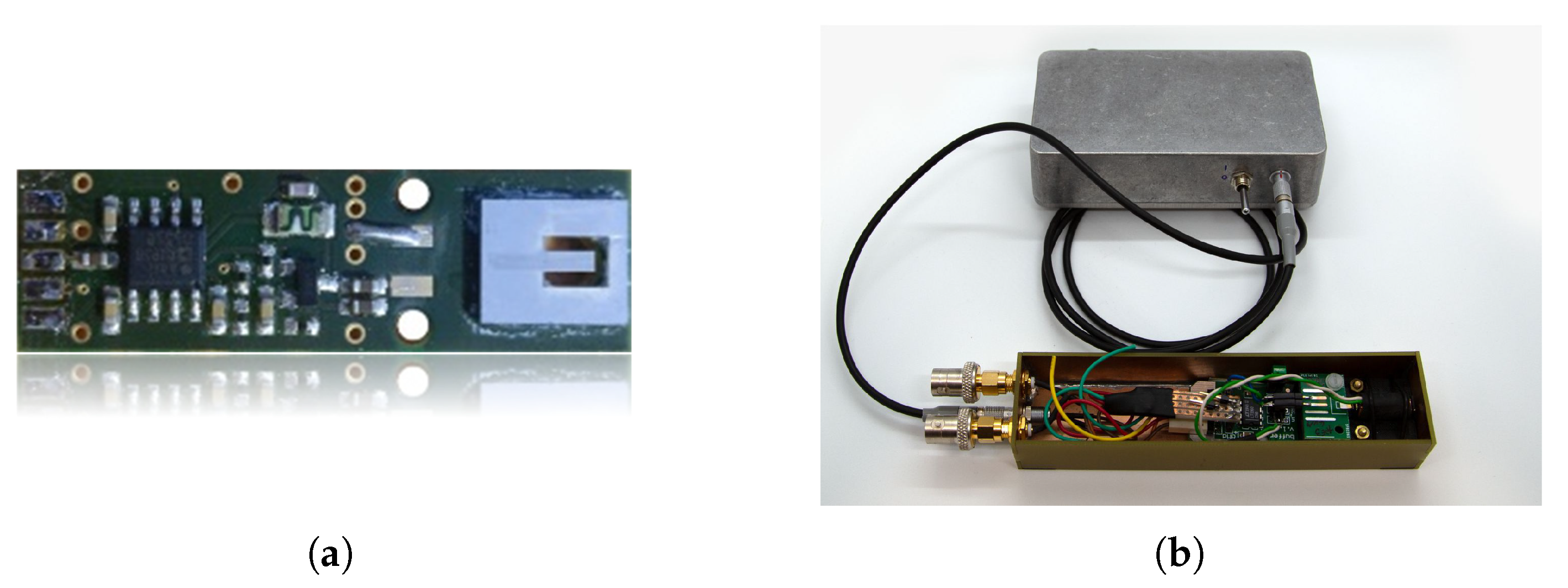
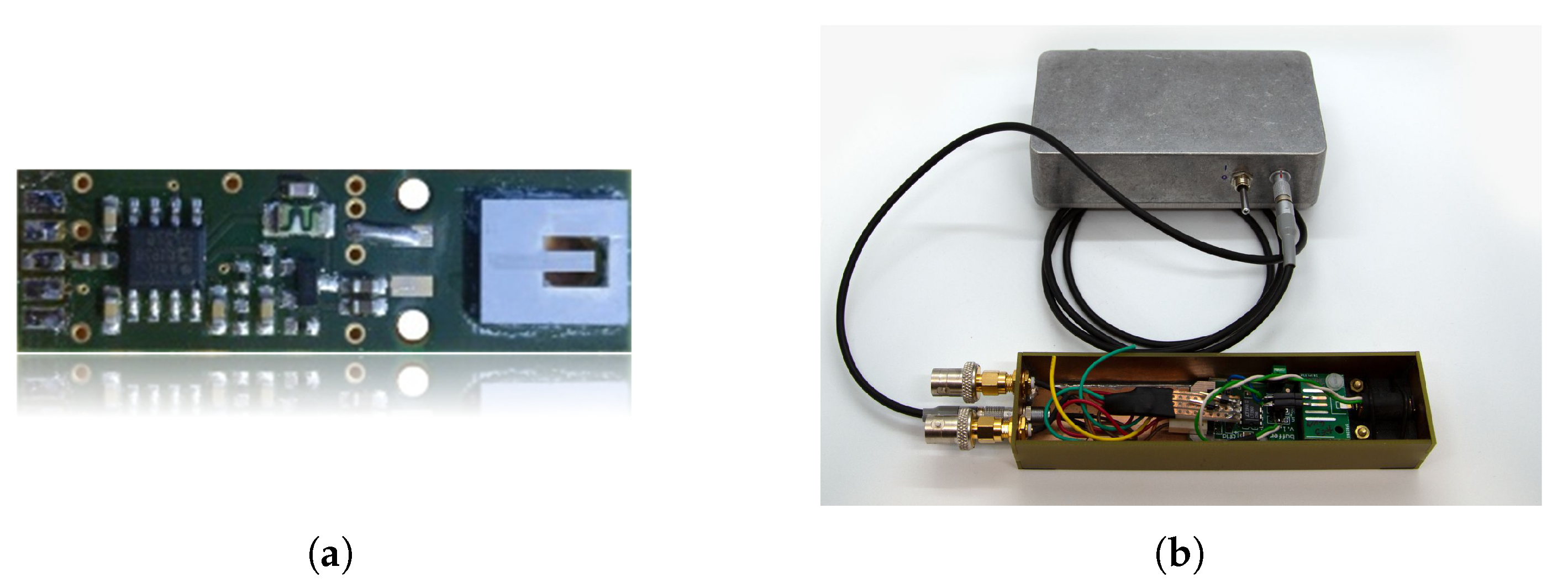
4.1. Exchange Bias Magnetoelectric Sensor
4.2. Electrically Modulated ME Sensor
4.3. Overview of the ME Evaluation Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| A/D | Analog/Digital |
| ACF | Autocorrelation function |
| AS | Amplitude spectrum |
| ASC | Application specific capacity |
| ASD | Amplitude spectral density |
| DFT | Discrete Fourier transform |
| DR | Dynamic range |
| ECG | Electrocardiography |
| EEG | Electroencephalography |
| EMC | Electromagnetic compatibility |
| ENBW | Equivalent noise bandwidth |
| HP | Highpass |
| JFET | Junction-gate-field-effect transistor |
| LOD | Limit-of-Detection |
| LOQ | Limit-of-Quantification |
| LTI | Linear time-invariant |
| ME | Magnetoelectric |
| MCG | Magnetocardiography |
| OPM | Optically Pumped Magnetometer |
| PCB | Printed circuit board |
| PS | Power spectrum |
| PSD | Power spectral density |
| PTB | Physikalisch Technische Bundesanstalt |
| RMS | Root mean square |
| SNNR | Signal-plus-noise to noise ratio |
| SNR | Signal-to-noise ratio |
| SQUID | Super conducting quantum interference device |
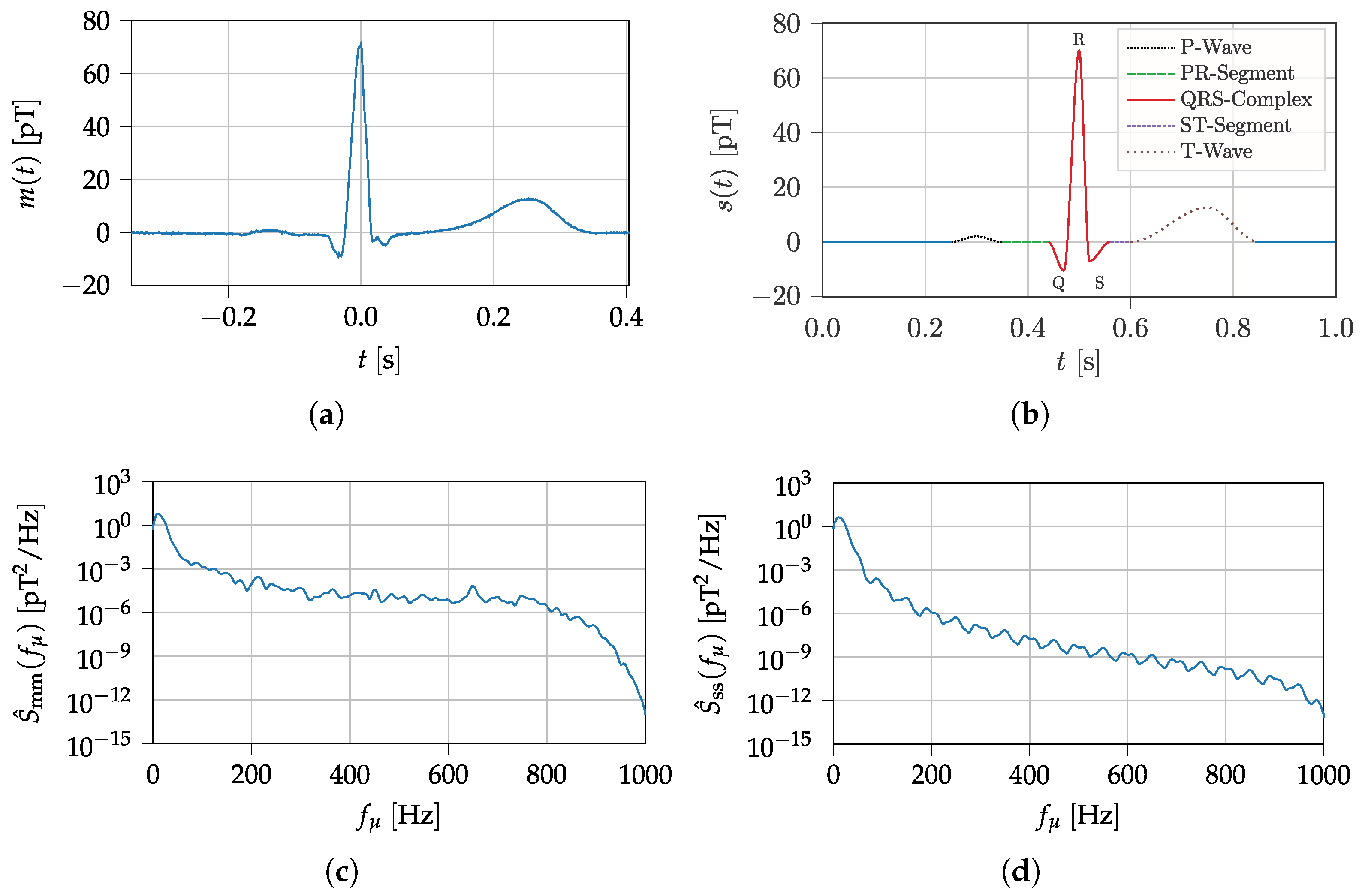
Appendix A. MCG Prototype Signal

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| t [s] | 0 | 1 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| [pT] | 0 | 0 | 0 | 0 | 70 | 0 | 0 | 0 | 0 | ||||
| [] | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
References
- Sanchez-Reyes, L.M.; Rodriguez-Resendiz, J.; Avecilla-Ramirez, G.N.; Garcia-Gomar, M.L.; Robles-Ocampo, J.B. Impact of EEG Parameters Detecting Dementia Diseases: A Systematic Review. IEEE Access 2021, 9, 78060–78074. [Google Scholar] [CrossRef]
- Williamson, S.J. Advances in Biomagnetism: Proceedings of the Seventh International Conference on Biomagnetism, New York, NY, USA, 13–18 August 1989; Plenum Press: New York, NY, USA, 1989. [Google Scholar]
- Boto, E.; Hill, R.M.; Rea, M.; Holmes, N.; Seedat, Z.A.; Leggett, J.; Shah, V.; Osborne, J.; Bowtell, R.; Brookes, M.J. Measuring functional connectivity with wearable MEG. NeuroImage 2021, 230, 117815. [Google Scholar] [CrossRef] [PubMed]
- Elzenheimer, E.; Laufs, H.; Schulte-Mattler, W.; Schmidt, G. Magnetic Measurement of Electrically Evoked Muscle Responses with Optically Pumped Magnetometers. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 756–765. [Google Scholar] [CrossRef] [PubMed]
- Shirai, Y.; Hirao, K.; Shibuya, T.; Okawa, S.; Hasegawa, Y.; Adachi, Y.; Sekihara, K.; Kawabata, S. Magnetocardiography Using a Magnetoresistive Sensor Array. Int. Heart J. 2019, 60, 50–54. [Google Scholar] [CrossRef] [Green Version]
- Janosek, M.; Butta, M.; Dressler, M.; Saunderson, E.; Novotny, D.; Fourie, C. 1-pT Noise Fluxgate Magnetometer for Geomagnetic Measurements and Unshielded Magnetocardiography. IEEE Trans. Instrum. Meas. 2020, 69, 2552–2560. [Google Scholar] [CrossRef]
- Macfarlane, P.W.; van Oosterom, A.; Pahlm, O.; Kligfield, P.; Janse, M.; Camm, A.J. Comprehensive Electrocardiology, 2nd ed.; Springer: London, UK, 2010. [Google Scholar] [CrossRef]
- Koch, H. Recent advances in magnetocardiography. J. Electrocardiol. 2004, 37, 117–122. [Google Scholar] [CrossRef]
- Hayes, P. Converse Magnetoelectric Resonators for Biomagnetic Field Sensing. Ph.D. Thesis, Kiel University, Kiel, Germany, 2020. [Google Scholar]
- Hayes, P.; Jovičević Klug, M.; Toxværd, S.; Durdaut, P.; Schell, V.; Teplyuk, A.; Burdin, D.; Winkler, A.; Weser, R.; Fetisov, Y.; et al. Converse Magnetoelectric Composite Resonator for Sensing Small Magnetic Fields. Sci. Rep. 2019, 9, 16355. [Google Scholar] [CrossRef]
- Jahns, R.; Knöchel, R.; Greve, H.; Woltermann, E.; Lage, E.; Quandt, E. Magnetoelectric sensors for biomagnetic measurements. In Proceedings of the 2011 IEEE International Symposium on Medical Measurements and Applications, Bari, Italy, 30–31 May 2011; pp. 107–110. [Google Scholar] [CrossRef]
- Bald, C.; Schmidt, G. Processing Chain for Localization of Magnetoelectric Sensors in Real Time. Sensors 2021, 21, 5675. [Google Scholar] [CrossRef]
- Hoffmann, J.; Elzenheimer, E.; Bald, C.; Hansen, C.; Maetzler, W.; Schmidt, G. Active Magnetoelectric Motion Sensing: Examining Performance Metrics with an Experimental Setup. Sensors 2021, 21, 8000. [Google Scholar] [CrossRef]
- Sander, T.; Jodko-Władzińska, A.; Hartwig, S.; Brühl, R.; Middelmann, T. Optically pumped magnetometers enable a new level of biomagnetic measurements. Adv. Opt. Technol. 2020, 9, 247–251. [Google Scholar] [CrossRef]
- Ripka, P. Magnetic Sensors and Magnetometers; Artech House: Boston, MA, USA, 2001. [Google Scholar]
- Hayes, P.; Schell, V.; Salzer, S.; Burdin, D.; Yarar, E.; Piorra, A.; Knöchel, R.; Fetisov, Y.K.; Quandt, E. Electrically modulated magnetoelectric AlN/FeCoSiB film composites for DC magnetic field sensing. J. Phys. D Appl. Phys. 2018, 51, 354002. [Google Scholar] [CrossRef]
- Ohm, J.R.; Lüke, H.D. Signalübertragung: Grundlagen der digitalen und analogen Nachrichtenübertragungssysteme, 11th ed.; Springer-Lehrbuch; Springer: Berlin, Germany, 2010. [Google Scholar] [CrossRef]
- Hänsler, E. Statistische Signale: Grundlagen und Anwendungen, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar] [CrossRef]
- Tumański, S. Handbook of Magnetic Measurements; Sensors Series; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Brinkmann, B. Internationales Wörterbuch der Metrologie: Grundlegende und Allgemeine Begriffe und Zugeordnete Benennungen (VIM) Deutsch-Englische Fassung ISO/IEC-Leitfaden 99:2007, 4th ed.; Beuth Wissen; Beuth Verlag GmbH: Berlin, Germany, 2012. [Google Scholar]
- DIN 32645:2008-11. Chemische Analytik: Nachweis-, Erfassungs- und Bestimmungsgrenze unter Wiederholbedingungen-Begriffe, Verfahren, Auswertung. Available online: https://www.beuth.de/de/norm/din-32645/110729574 (accessed on 21 January 2021). [CrossRef]
- Wenclawiak, B.W.; Koch, M.; Hadjicostas, E. Quality Assurance in Analytical Chemistry; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar] [CrossRef]
- Mitra, S.K. Digital Signal Processing: A Computer-Based Approach, 4th ed.; McGraw-Hill: New York, NY, USA, 2011. [Google Scholar]
- Proakis, J.G.; Manolakis, D.G. Digital signal processing, 4th ed.; Pearson New International Edition ed.; Always Learning; Pearson: Harlow, UK, 2014. [Google Scholar]
- Papula, L. Mathematik für Ingenieure und Naturwissenschaftler: Band 3: Vektoranalysis, Wahrscheinlichkeitsrechnung, Mathematische Statistik, Fehler- und Ausgleichsrechnung, 7th ed.; Springer Vieweg: Wiesbaden, Germany, 2016. [Google Scholar] [CrossRef]
- Tietze, U.; Schenk, C.; Gamm, E. Electronic Circuits: Handbook for Design and Application, 2nd ed.; First Indian Reprint ed.; Springer: New Delhi, India, 2012. [Google Scholar] [CrossRef]
- Norton, H.N. Handbook of Transducers; Prentice-Hall: Englewood Cliffs, NJ, USA, 1989. [Google Scholar]
- Madisetti, V.K.; Williams, D.B. The Digital Signal Processing Handbook; The Electrical Engineering Handbook Series; CRC Press: Boca Raton, FL, USA, 1997. [Google Scholar]
- Rohde & Schwarz GmbH & Co. KG. R&S UPV Audio Analyzer Operating Manual; Rohde & Schwarz GmbH & Co. KG: München, Germany, 2015. [Google Scholar]
- Keithley Instruments Inc. Model 6220 DC Current Source Model 6221 AC and DC Current Source Users Manual; Keithley Instruments Inc.: Cleveland, OH, USA, 2008. [Google Scholar]
- Sternickel, K.; Braginski, A.I. Biomagnetism using SQUIDs: Status and perspectives. Supercond. Sci. Technol. 2006, 19, S160–S171. [Google Scholar] [CrossRef]
- Elzenheimer, E.; Laufs, H.; Sander-Thömmes, T.; Schmidt, G. Magnetoneurograhy of an Electrically Stimulated Arm Nerve. Curr. Dir. Biomed. Eng. 2018, 4, 363–366. [Google Scholar] [CrossRef] [Green Version]
- Reermann, J.; Durdaut, P.; Salzer, S.; Demming, T.; Piorra, A.; Quandt, E.; Frey, N.; Höft, M.; Schmidt, G. Evaluation of magnetoelectric sensor systems for cardiological applications. Measurement 2018, 116, 230–238. [Google Scholar] [CrossRef]
- Welch, P. The use of fast Fourier transform for the estimation of power spectra: A method based on time averaging over short, modified periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef] [Green Version]
- Weik, M.H. Signal-plus-noise to noise ratio. In Computer Science and Communications Dictionary; Springer: Boston, MA, USA, 2001; p. 1583. [Google Scholar] [CrossRef]
- Bald, C.; Elzenheimer, E.; Sander-Thömmes, T.; Schmidt, G. Amplitudenverlauf des Herzmagnetfeldes als Funktion des Abstandes. In Proceedings of the Workshop Biosignal Processing 2018—Innovative Processing of Bioelectric and Biomagnetic Signals, Erfurt, Germany, 21–23 March 2018. [Google Scholar]
- Scher, A.M.; Young, A.C. Frequency Analysis of the Electrocardiogram. Circ. Res. 1960, 8, 344–346. [Google Scholar] [CrossRef] [Green Version]
- Schlichthärle, D. Digital Filters: Basics and Design; Springer eBook Collection; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar] [CrossRef]
- Shannon, C. Communication in the Presence of Noise. Proc. IRE 1949, 37, 10–21. [Google Scholar] [CrossRef]
- Salzer, S.D. Readout Methods for Magnetoelectric Sensors. Ph.D. Thesis, Kiel University, Kiel, Germany, 2018. [Google Scholar]
- Stanford Research Systems. Operating Manual and Programming Reference, Model SR785 Dynamic Signal Analyzer; Stanford Research Systems Inc.: Sunnyvale, CA, USA, 2017. [Google Scholar]
- Stanford Research Systems. MODEL SR830 DSP Lock-In Amplifier; Stanford Research Systems Inc.: Sunnyvale, CA, USA, 2011. [Google Scholar]
- Zabel, S.; Reermann, J.; Fichtner, S.; Kirchhof, C.; Quandt, E.; Wagner, B.; Schmidt, G.; Faupel, F. Multimode delta-E effect magnetic field sensors with adapted electrodes. Appl. Phys. Lett. 2016, 108, 222401. [Google Scholar] [CrossRef]
- Reermann, J.; Zabel, S.; Kirchhof, C.; Quandt, E.; Faupel, F.; Schmidt, G. Adaptive Readout Schemes for Thin-Film Magnetoelectric Sensors Based on the delta-E Effect. IEEE Sens. J. 2016, 16, 4891–4900. [Google Scholar] [CrossRef]
- Ludwig, A.; Quandt, E. Optimization of the ΔE-effect in thin films and multilayers by magnetic field annealing. IEEE Trans. Magn. 2002, 38, 2829–2831. [Google Scholar] [CrossRef]
- Durdaut, P.; Salzer, S.; Reermann, J.; Röbisch, V.; McCord, J.; Meyners, D.; Quandt, E.; Schmidt, G.; Knöchel, R.; Höft, M. Improved Magnetic Frequency Conversion Approach for Magnetoelectric Sensors. IEEE Sens. Lett. 2017, 1, 1–4. [Google Scholar] [CrossRef]
- Salzer, S.; Durdaut, P.; Röbisch, V.; Meyners, D.; Quandt, E.; Höft, M.; Knöchel, R. Generalized Magnetic Frequency Conversion for Thin-Film Laminate Magnetoelectric Sensors. IEEE Sens. J. 2017, 17, 1373–1383. [Google Scholar] [CrossRef]
- Durdaut, P.; Penner, V.; Kirchhof, C.; Quandt, E.; Knöchel, R.; Höft, M. Noise of a JFET Charge Amplifier for Piezoelectric Sensors. IEEE Sens. J. 2017, 17, 7364–7371. [Google Scholar] [CrossRef]
- Lage, E.; Kirchhof, C.; Hrkac, V.; Kienle, L.; Jahns, R.; Knöchel, R.; Quandt, E.; Meyners, D. Exchange biasing of magnetoelectric composites. Nat. Mater 2012, 11, 523–529. [Google Scholar] [CrossRef]
- Spetzler, B.; Bald, C.; Durdaut, P.; Reermann, J.; Kirchhof, C.; Teplyuk, A.; Meyners, D.; Quandt, E.; Höft, M.; Schmidt, G.; et al. Exchange biased delta-E effect enables the detection of low frequency pT magnetic fields with simultaneous localization. Sci. Rep. 2021, 11, 5269. [Google Scholar] [CrossRef] [PubMed]
- Durdaut, P.; Salzer, S.; Reermann, J.; Röbisch, V.; Hayes, P.; Piorra, A.; Meyners, D.; Quandt, E.; Schmidt, G.; Knöchel, R.; et al. Thermal-Mechanical Noise in Resonant Thin-Film Magnetoelectric Sensors. IEEE Sens. J. 2017, 17, 2338–2348. [Google Scholar] [CrossRef]
- Reermann, J.; Elzenheimer, E.; Schmidt, G. Real-Time Biomagnetic Signal Processing for Uncooled Magnetometers in Cardiology. IEEE Sens. J. 2019, 19, 4237–4249. [Google Scholar] [CrossRef]
- Urs, N.O.; Golubeva, E.; Röbisch, V.; Toxvaerd, S.; Deldar, S.; Knöchel, R.; Höft, M.; Quandt, E.; Meyners, D.; McCord, J. Direct Link between Specific Magnetic Domain Activities and Magnetic Noise in Modulated Magnetoelectric Sensors. Phys. Rev. Appl. 2020, 13. [Google Scholar] [CrossRef]
- Gussak, I.; Antzelevitch, C.; Wilde, A.A.M.; Friedman, P.A.; Ackerman, M.J. Electrical Diseases of the Heart: Genetics, Mechanisms, Treatment, Prevention, 1st ed.; Springer: London, UK, 2008. [Google Scholar]
- Elzenheimer, E. Analyse Stimulationsevozierter Muskel- und Nervensignale Mithilfe Elektrischer und Magnetischer Sensorik. Ph.D. Thesis, Chair of Digital Signal Processing and System Theory. Kiel University, Kiel, Germany, 2022. [Google Scholar]
- QuSpin. Specification QZFM Gen-3. Available online: https://quspin.com/products-qzfm/ (accessed on 9 December 2021).
- Bertrand, F.; Jager, T.; Boness, A.; Fourcault, W.; Le Gal, G.; Palacios-Laloy, A.; Paulet, J.; Léger, J.M. A 4He vector zero-field optically pumped magnetometer operated in the Earth-field. Rev. Sci. Instrum. 2021, 92, 105005. [Google Scholar] [CrossRef]
- TDK Corporation. Ultrasensitive Magnetic Sensor-Nivio xMR. Available online: https://product.tdk.com/system/files/dam/doc/content/event/techfro2020/tech20_17.pdf (accessed on 9 December 2021).





| Metrics | Exchange Bias ME Sensor [13] | Electrically Modulated ME Sensor [10,16] |
|---|---|---|
| Operation | Room | Room |
| Temperature | temperature | temperature |
| Inherent | ≈4 pT/ | ≈70 pT/ |
| Noise | at 7.684 kHz | at 10 Hz |
| Bandwidth | ≈12.5 Hz (−6 dB) | unknown |
| Sensitivity | ≈98 kV/T | ≈40 kV/T |
| Availability | under development | under development |
| Parameters | Exchange Bias ME Sensor | Electrically Modulated ME Sensor |
|---|---|---|
| Amplitude Response | ||
| 7684 Hz | ||
| = 7680 Hz (low) = 7689 Hz (high) | 11.3 kHz | |
| = 7677 Hz (low) = 7692 Hz (high) | 15 kHz | |
| Q | 854 | |
| 0.94 dB/Hz (low) 0.92 dB/Hz (high) | 0.805 dB/kHz | |
| 9 Hz (bandpass) | 11.3 kHz (lowpass) | |
| 15 Hz (bandpass) | 15 kHz (lowpass) | |
| Sensitivity | ||
| 63 kV/T at | 5.76 kV/T at 10 Hz | |
| Noise | ||
| 6 pT/ at | 66 pT/ at 10 Hz | |
| 20 pT ( to ) | 11.7 nT (1 Hz to ) | |
| Input-Output-Relation | ||
| 11 pT | 55 pT | |
| 22 pT | 102 pT | |
| 42 pT | 210 pT | |
| 6 µT | 18 µT | |
| 18 µT | 23 µT | |
| 27 µT | ||
| 103 dB | 98 dB | |
| Application (MCG) Specific Quantities | ||
| −90 dB | −11 dB | |
| 9.8 dB Hz | 23 dB Hz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elzenheimer, E.; Bald, C.; Engelhardt, E.; Hoffmann, J.; Hayes, P.; Arbustini, J.; Bahr, A.; Quandt, E.; Höft, M.; Schmidt, G. Quantitative Evaluation for Magnetoelectric Sensor Systems in Biomagnetic Diagnostics. Sensors 2022, 22, 1018. https://doi.org/10.3390/s22031018
Elzenheimer E, Bald C, Engelhardt E, Hoffmann J, Hayes P, Arbustini J, Bahr A, Quandt E, Höft M, Schmidt G. Quantitative Evaluation for Magnetoelectric Sensor Systems in Biomagnetic Diagnostics. Sensors. 2022; 22(3):1018. https://doi.org/10.3390/s22031018
Chicago/Turabian StyleElzenheimer, Eric, Christin Bald, Erik Engelhardt, Johannes Hoffmann, Patrick Hayes, Johan Arbustini, Andreas Bahr, Eckhard Quandt, Michael Höft, and Gerhard Schmidt. 2022. "Quantitative Evaluation for Magnetoelectric Sensor Systems in Biomagnetic Diagnostics" Sensors 22, no. 3: 1018. https://doi.org/10.3390/s22031018
APA StyleElzenheimer, E., Bald, C., Engelhardt, E., Hoffmann, J., Hayes, P., Arbustini, J., Bahr, A., Quandt, E., Höft, M., & Schmidt, G. (2022). Quantitative Evaluation for Magnetoelectric Sensor Systems in Biomagnetic Diagnostics. Sensors, 22(3), 1018. https://doi.org/10.3390/s22031018