

High-Precision Semiconductor Laser Current Drive and Temperature Control System Design


Abstract
1. Introduction
2. Characteristics of Semiconductor Lasers
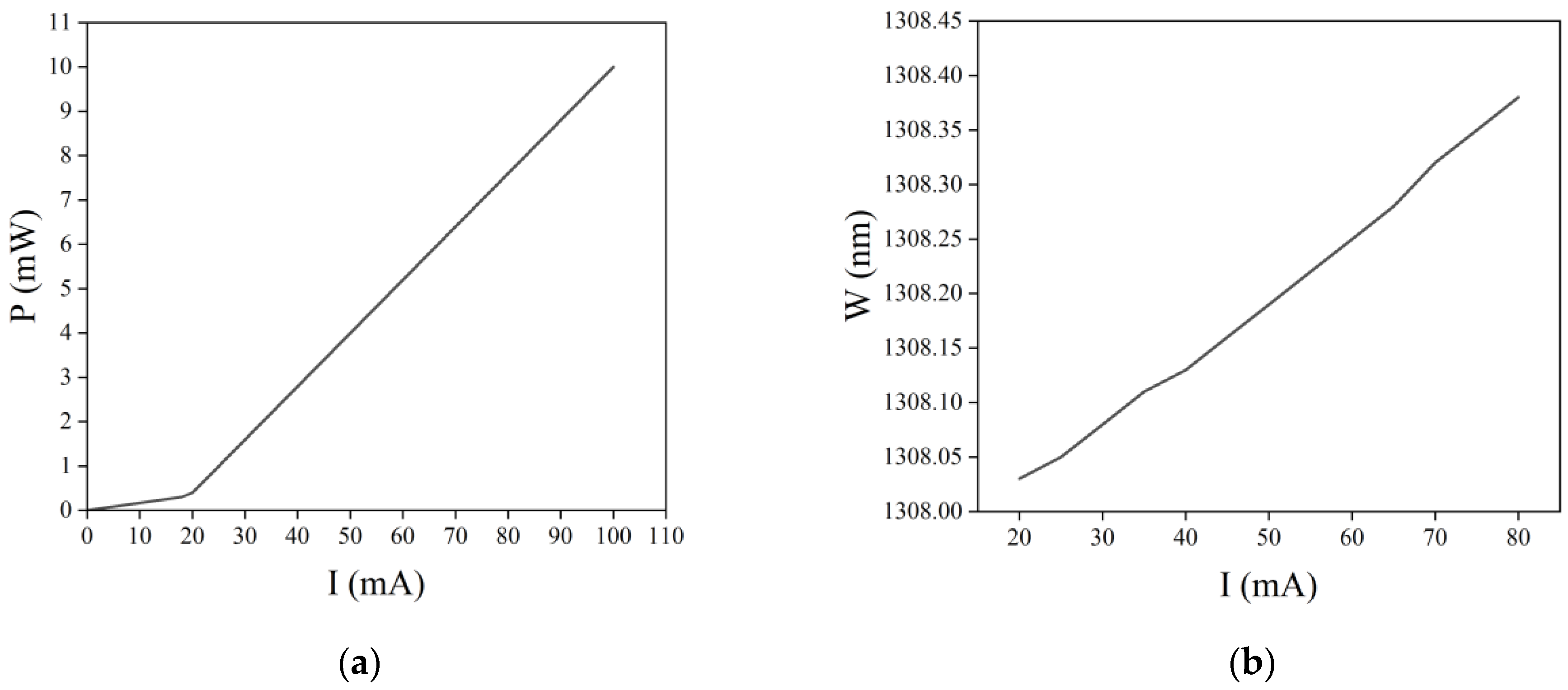
2.1. Current Characteristics
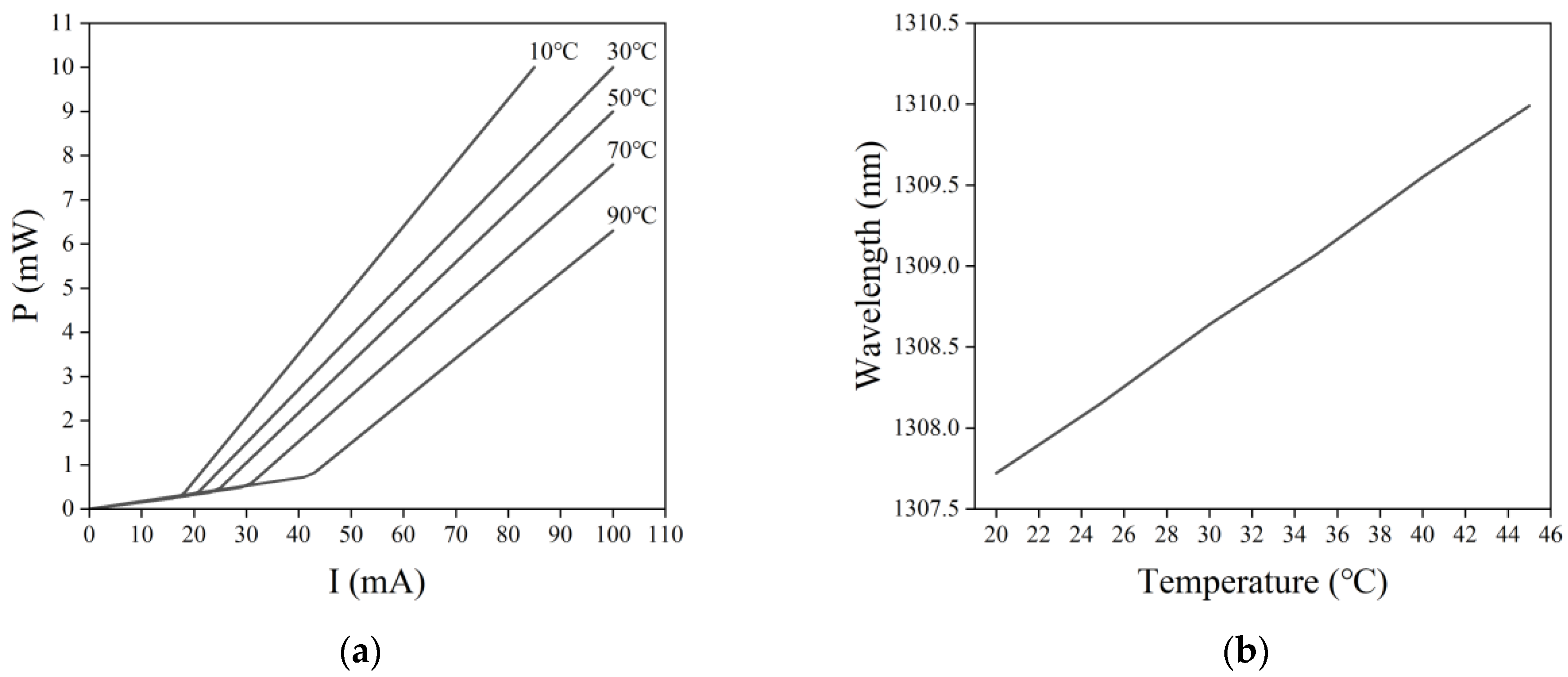
2.2. Temperature Characteristics
3. Current Drive and Temperature Control Circuit Design
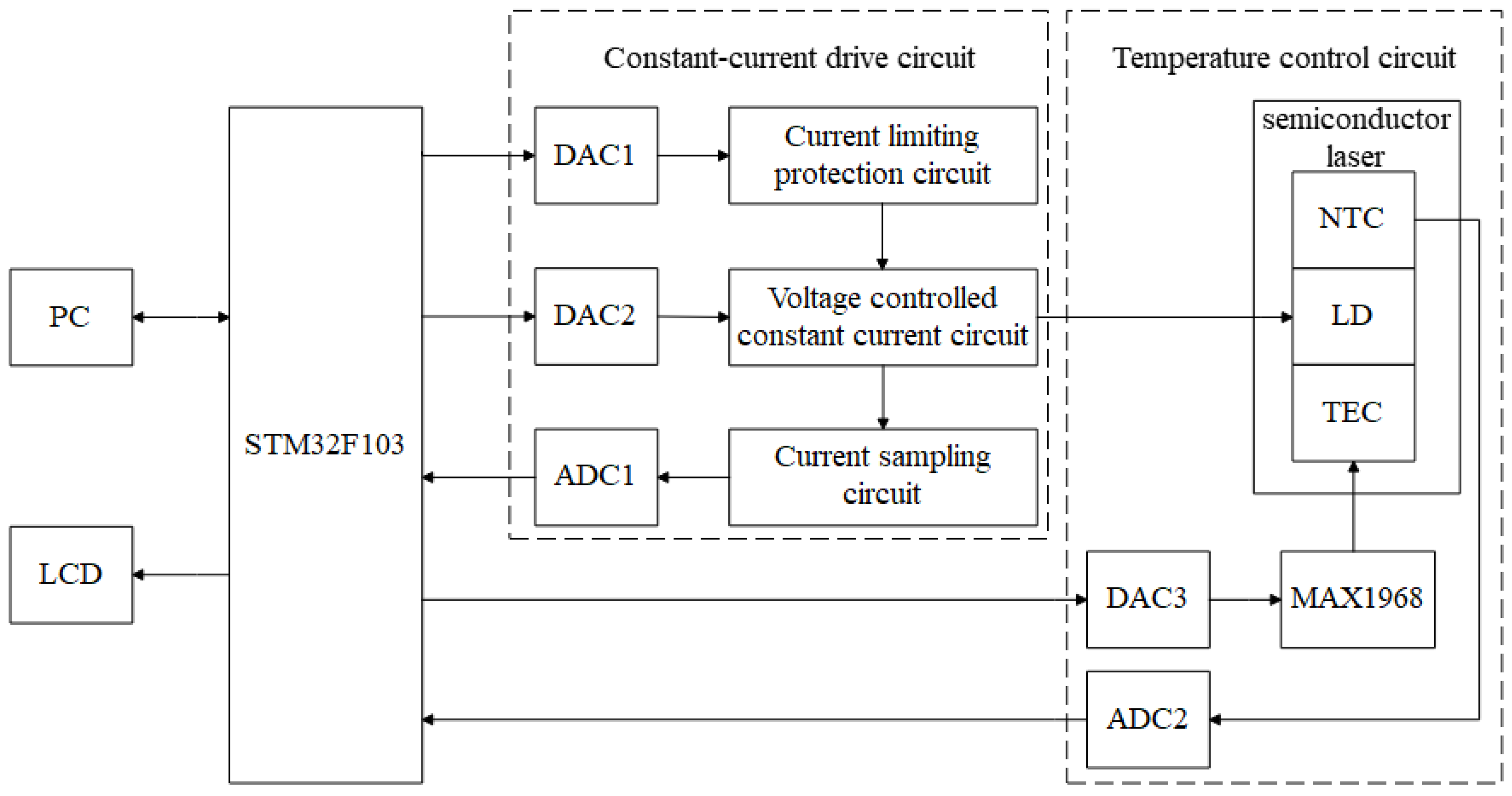
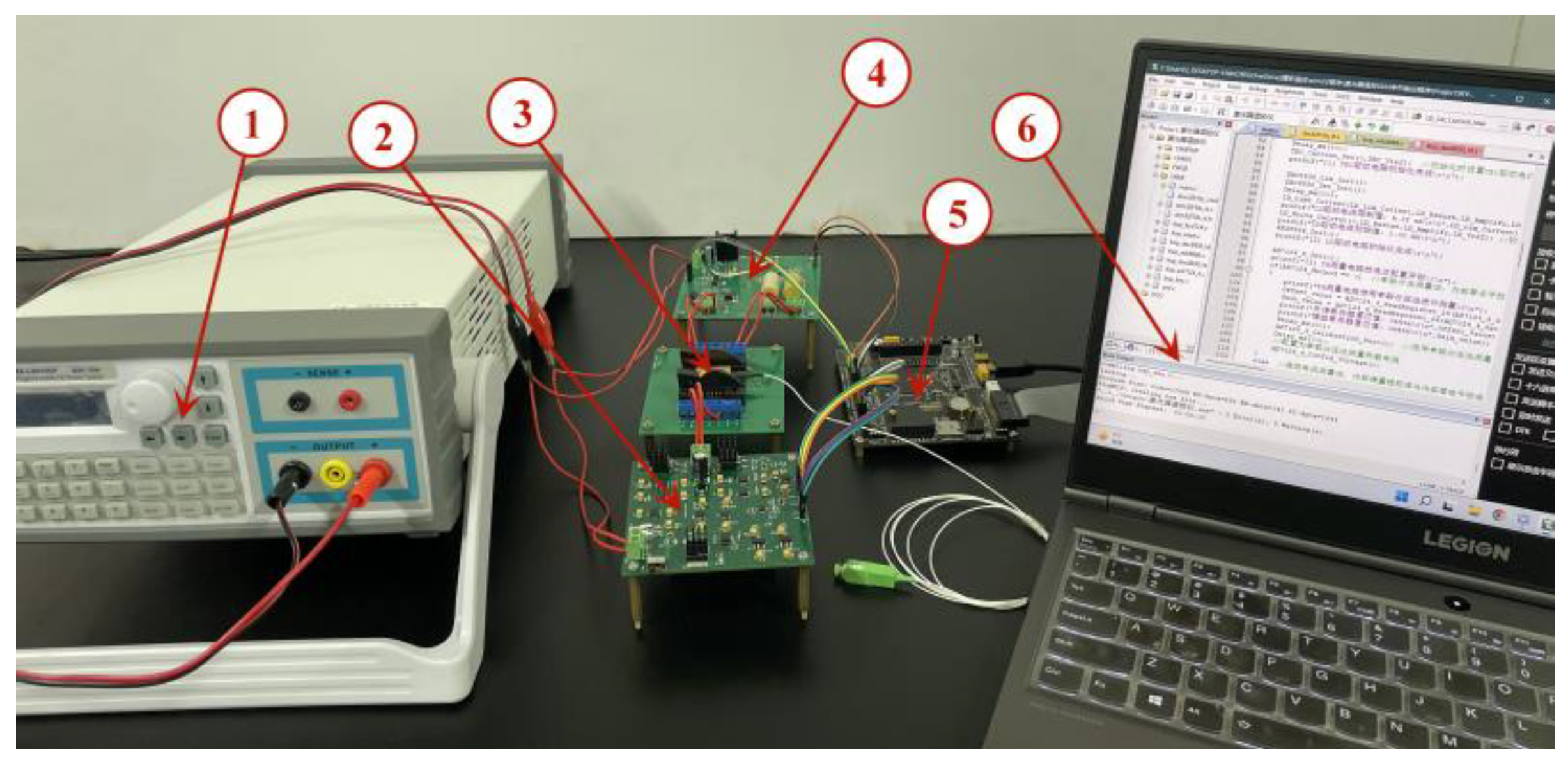
3.1. Overall Design Scheme
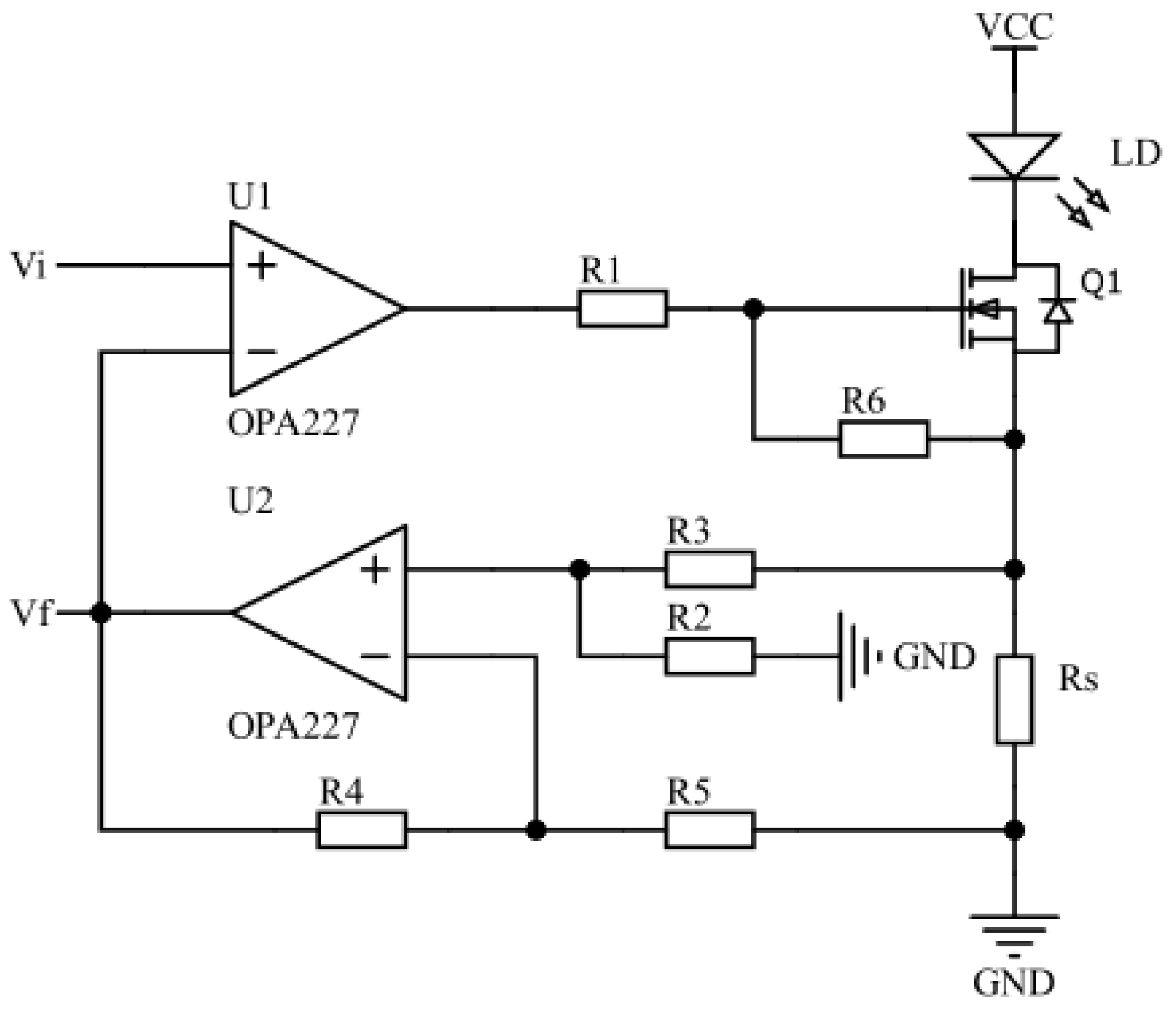
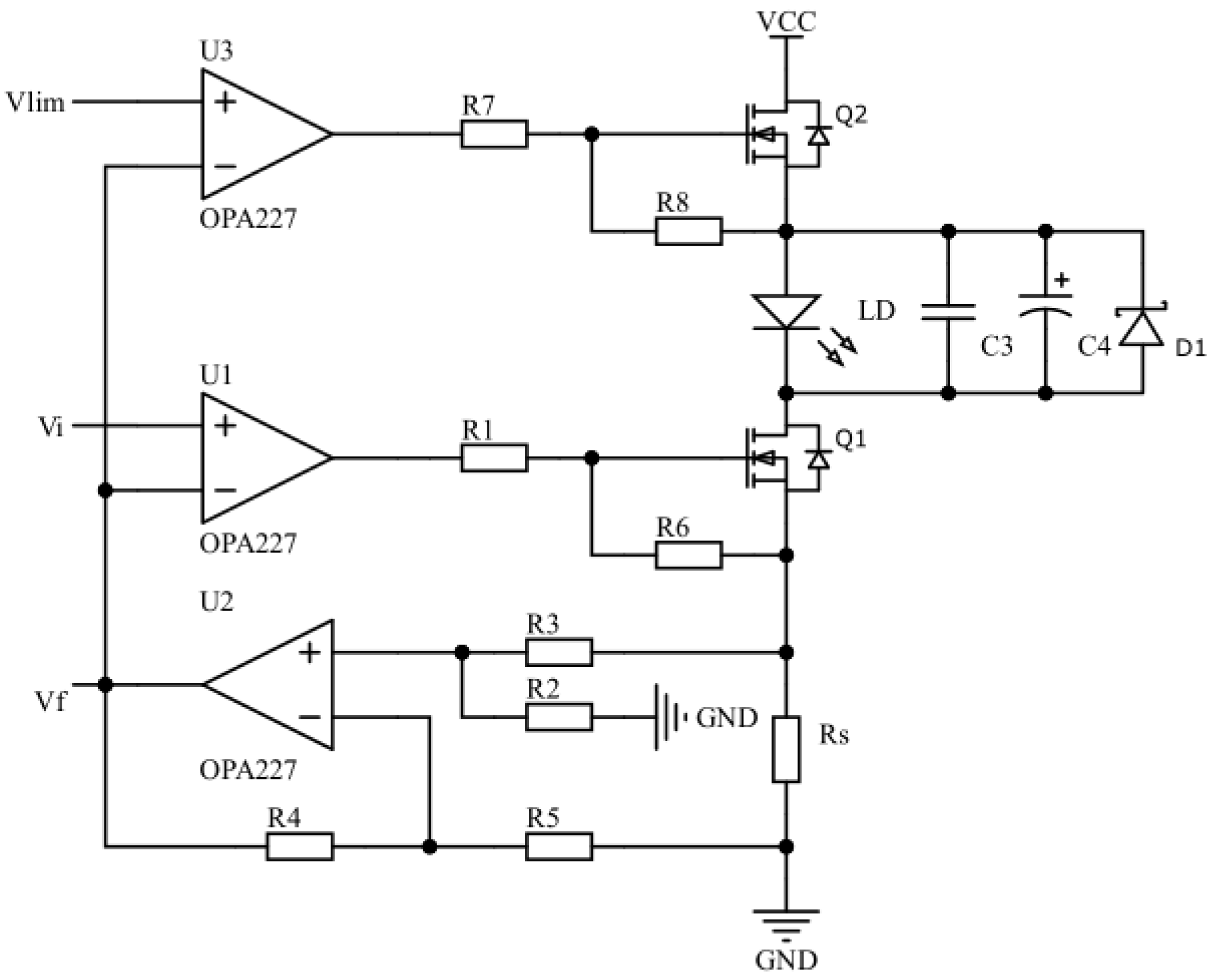
3.2. Constant-Current Driver Circuit Design
3.3. Current Limiting and Electrostatic Protection Circuit Design
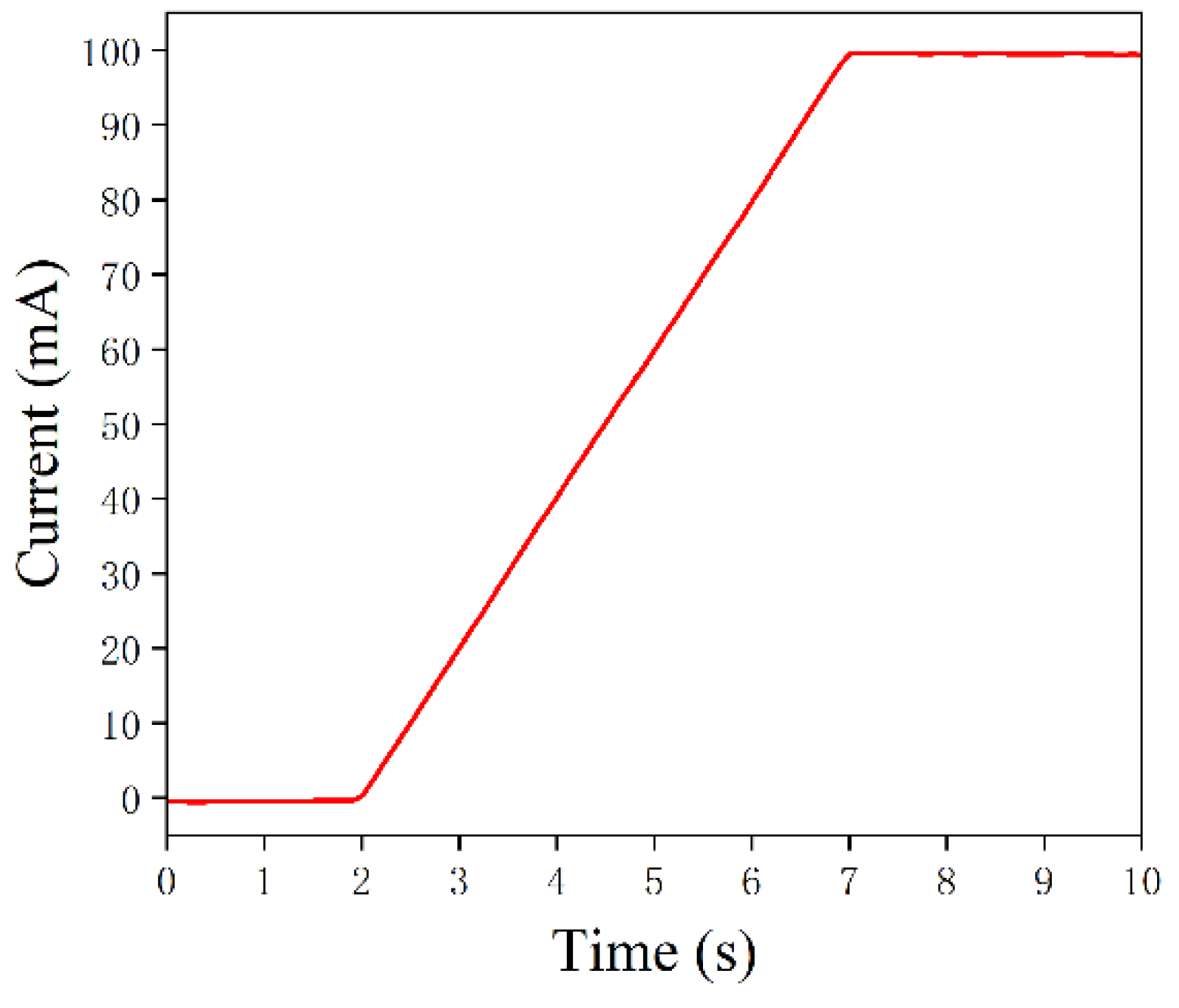
3.4. Linear Slow-Start Design of the Drive Circuit
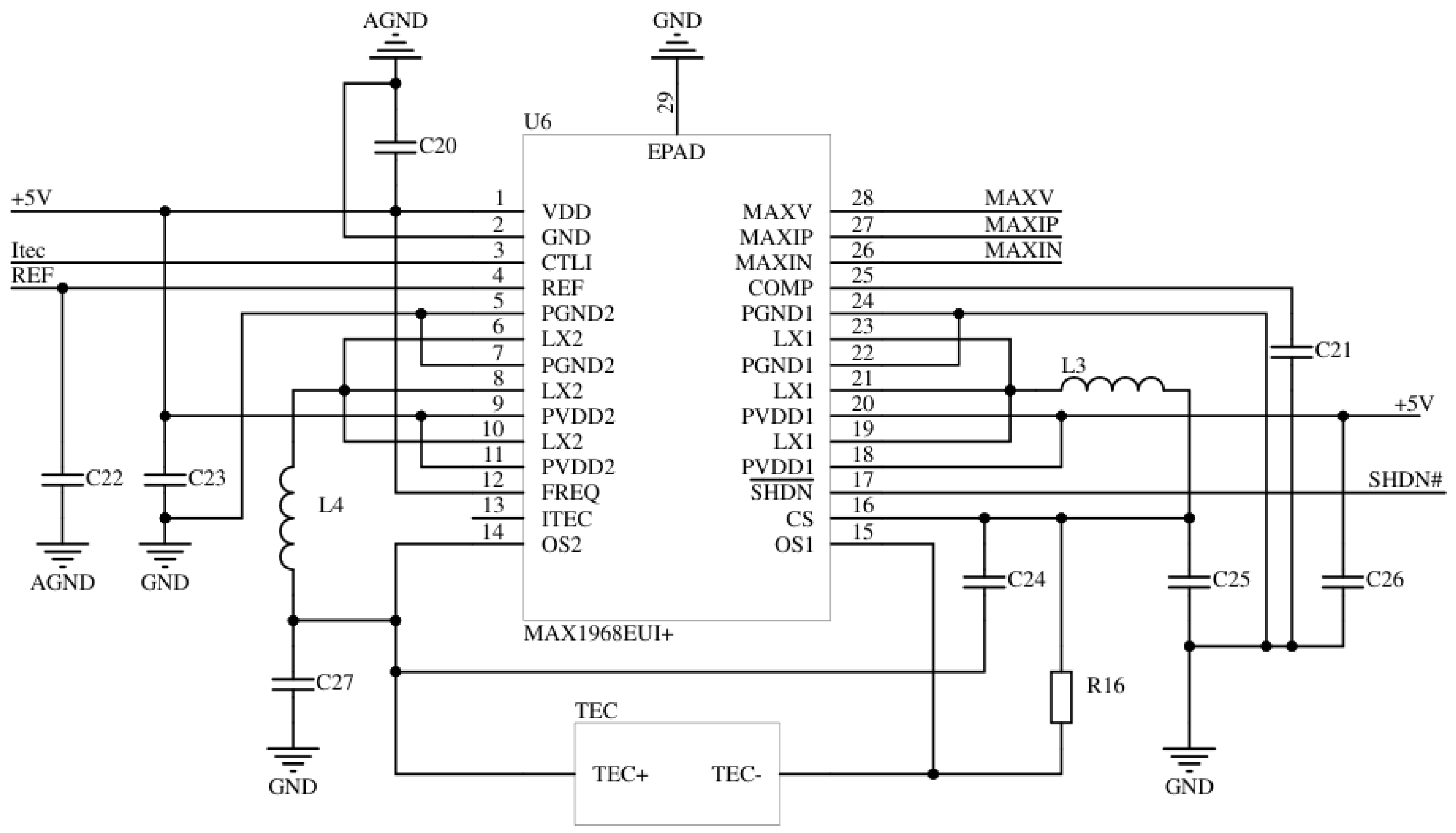
3.5. Temperature Control Circuit Design
4. Implementation of the Temperature Control Algorithm
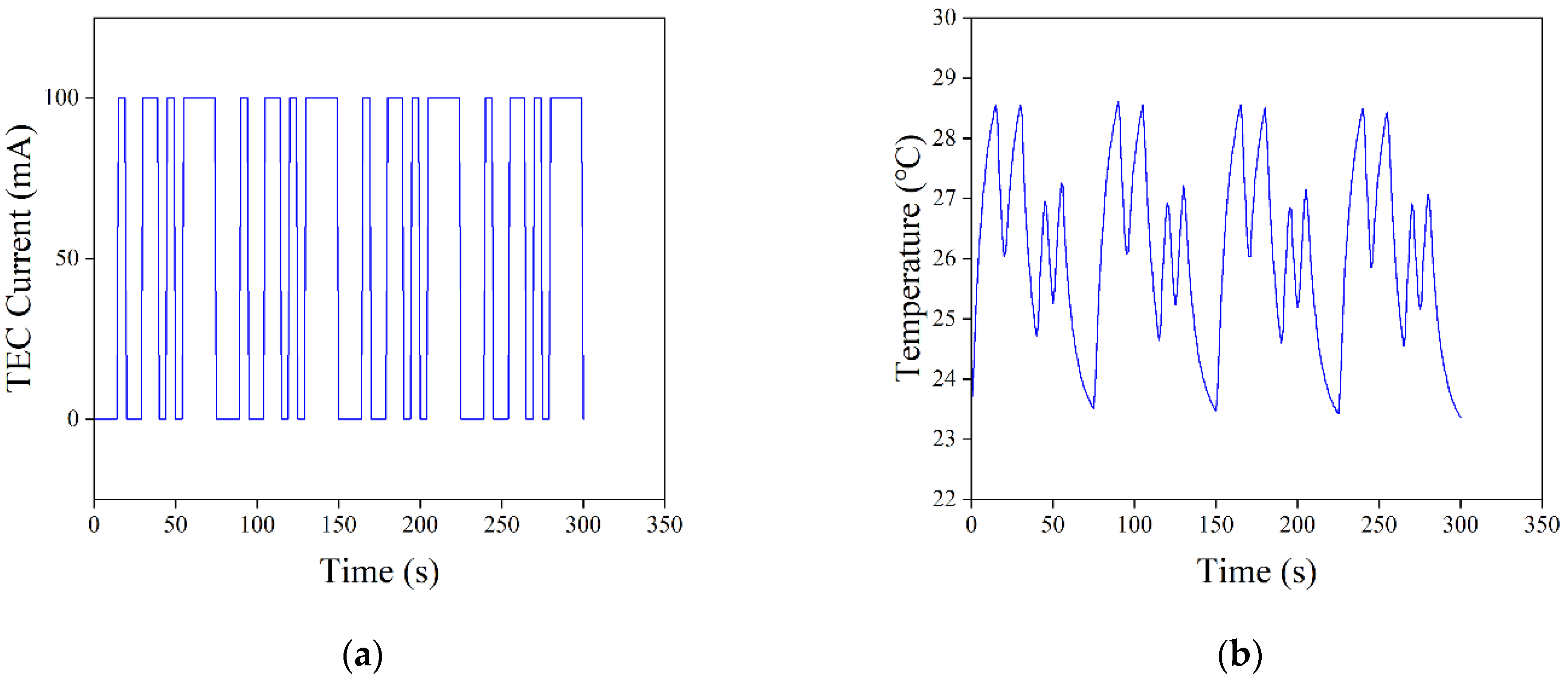
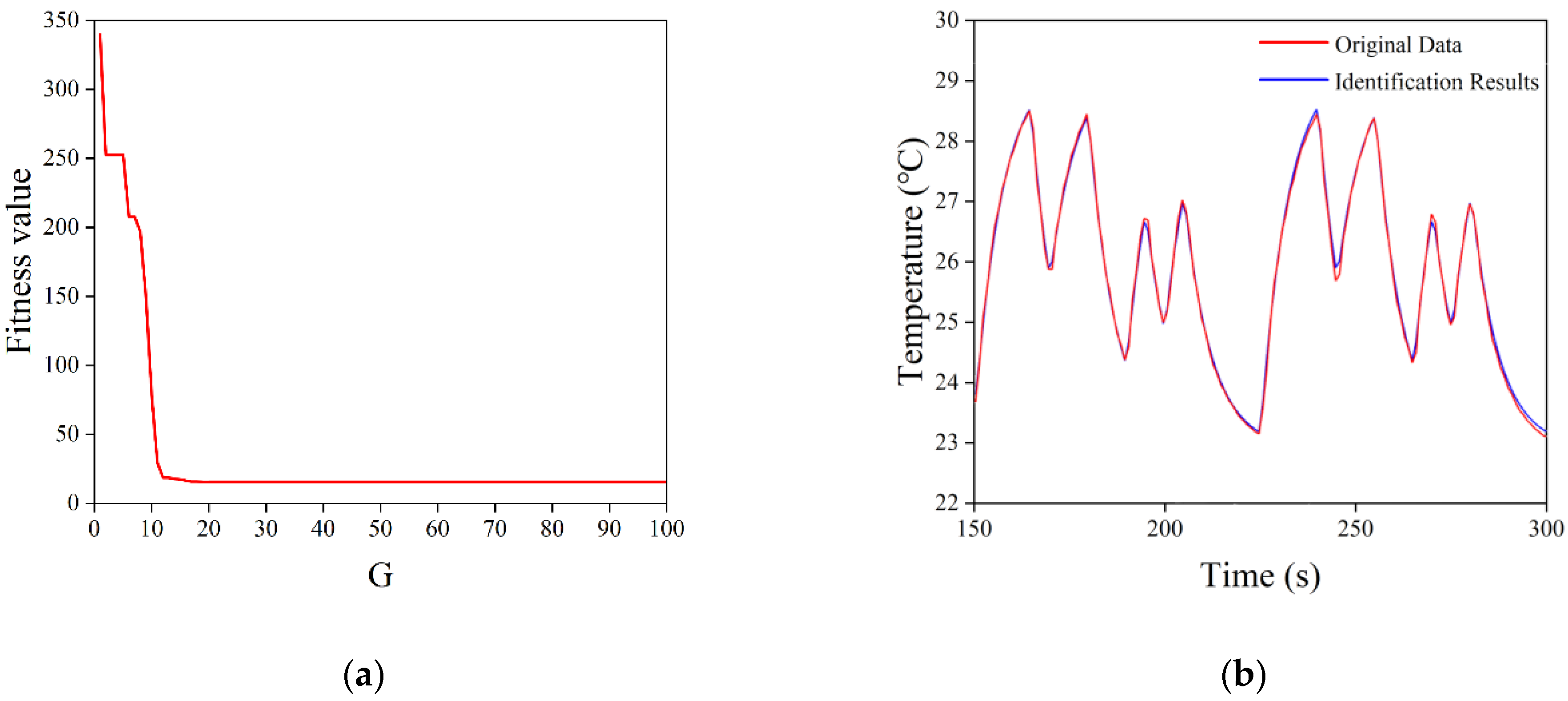
4.1. Model Construction of the Temperature Control System
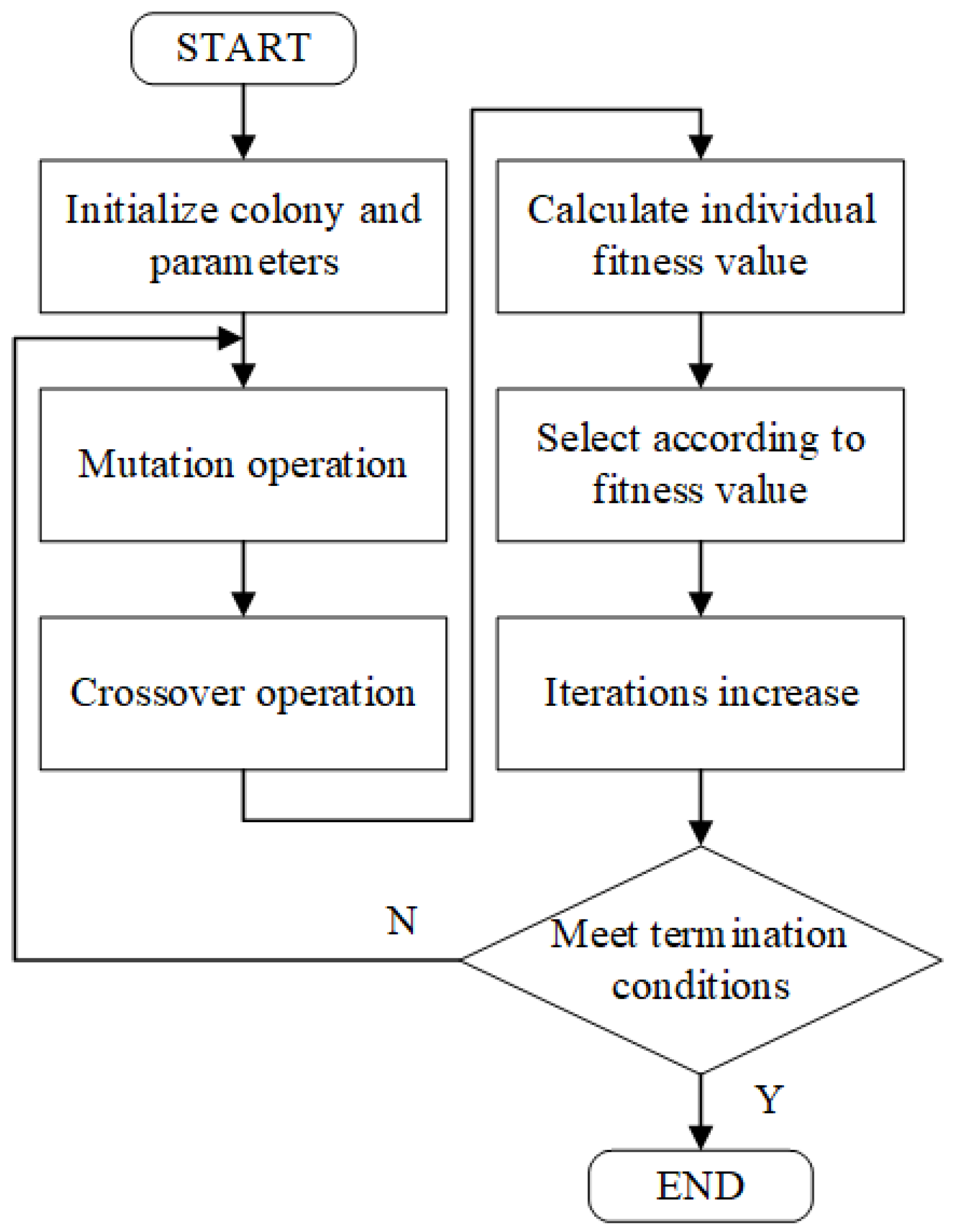
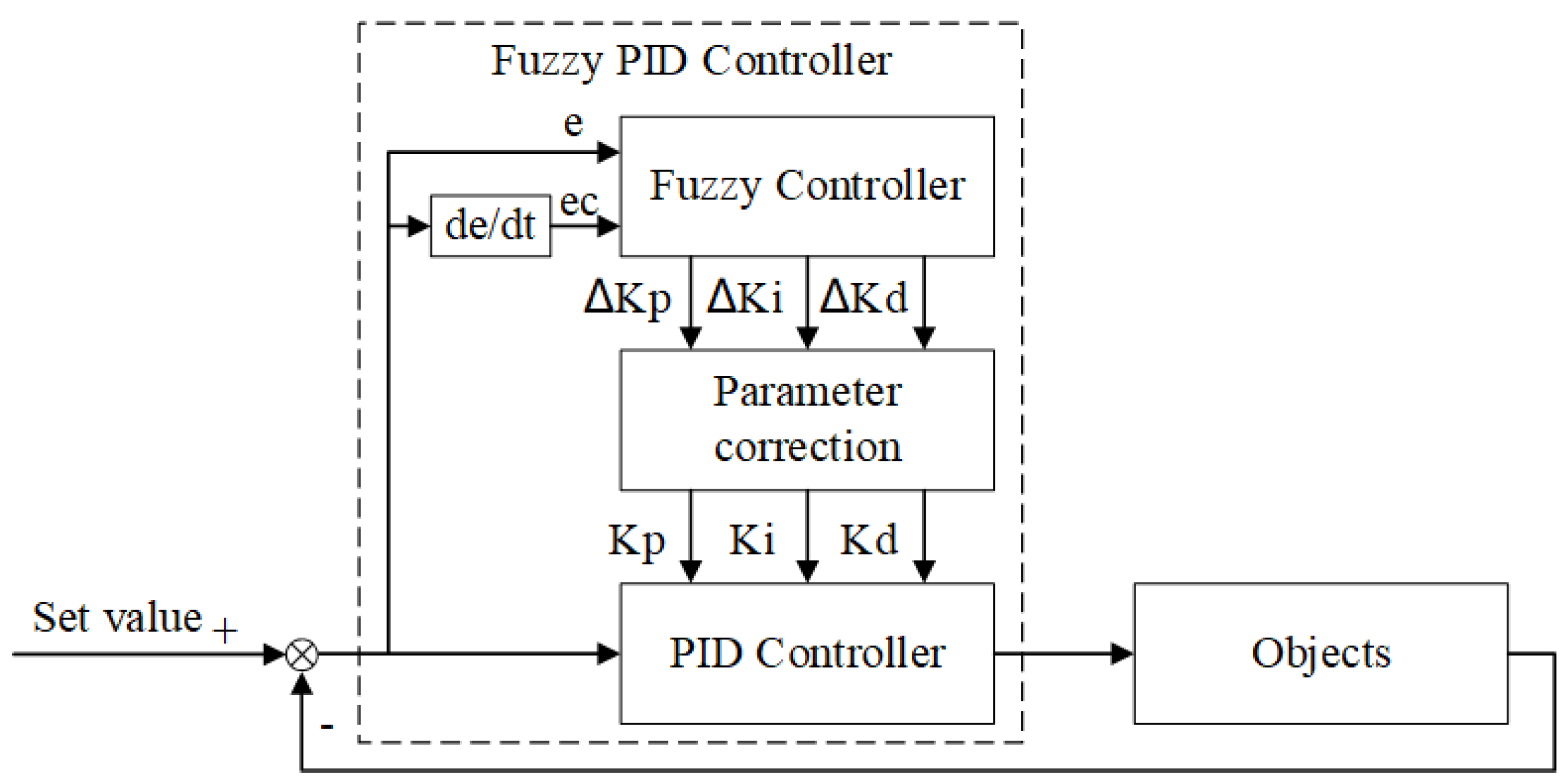
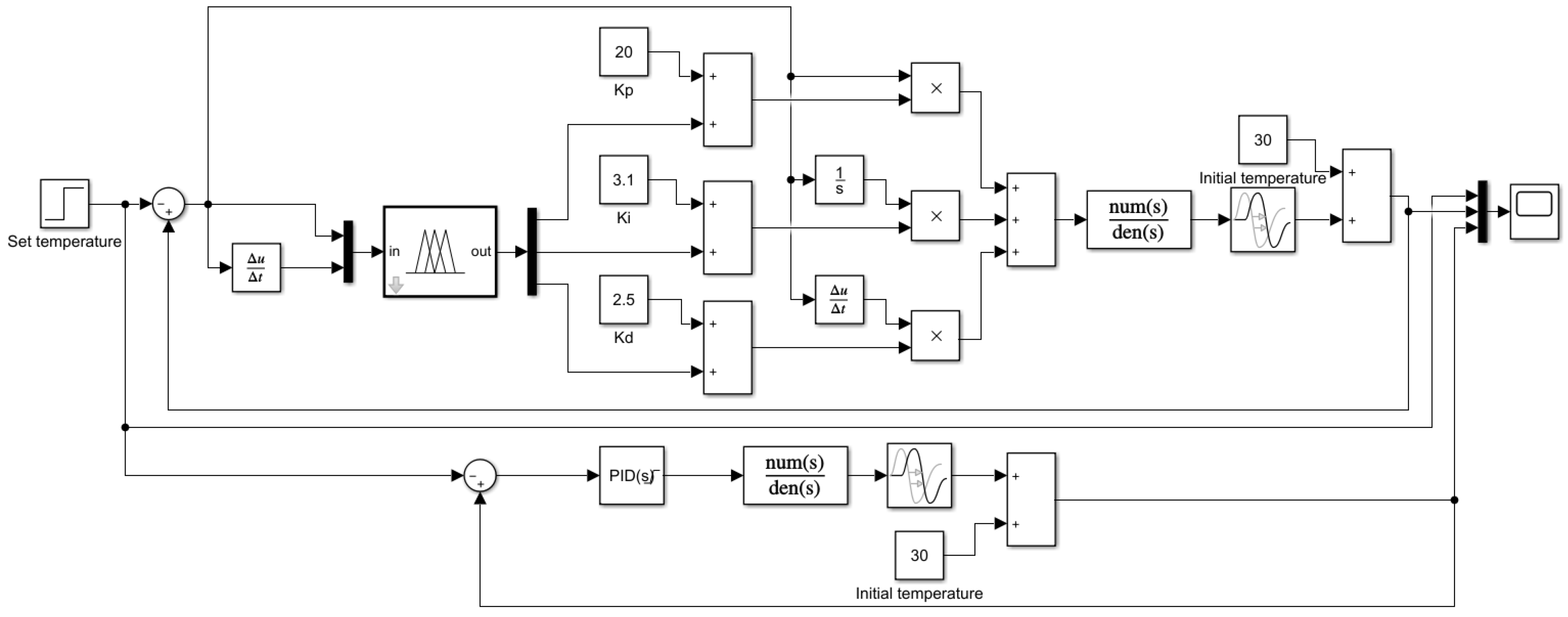
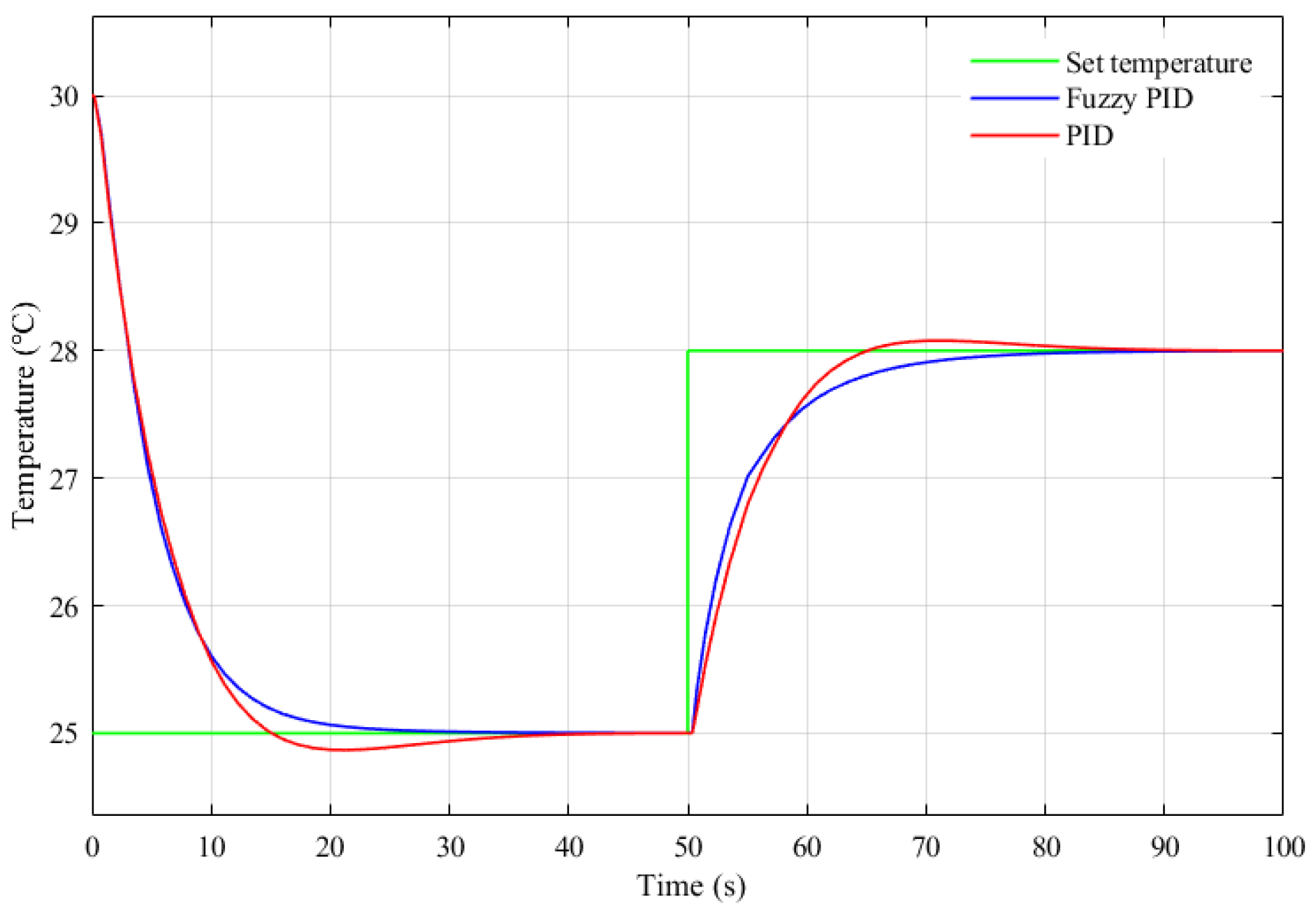
4.2. Fuzzy PID Controller
5. Experimental Results and Analysis
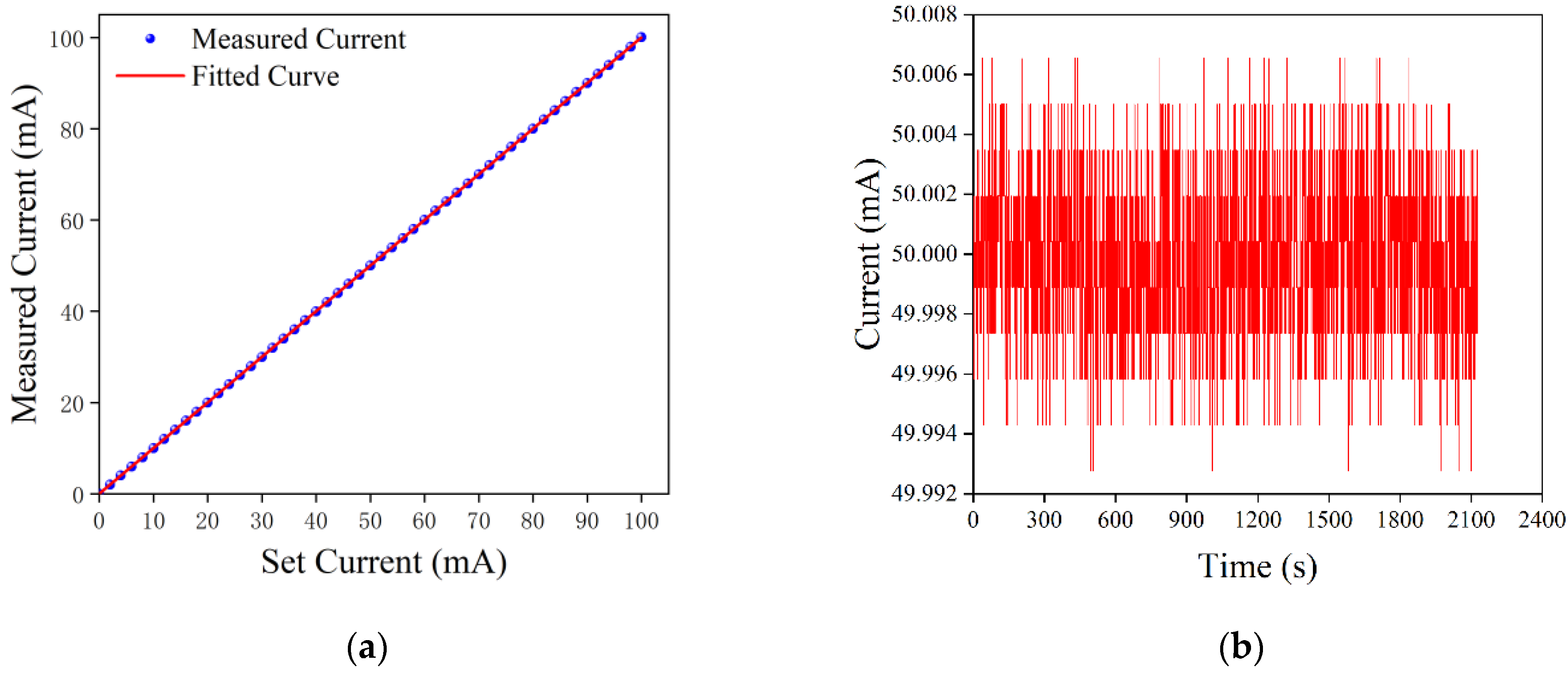
5.1. Experiments with Constant-Current Output Characteristics
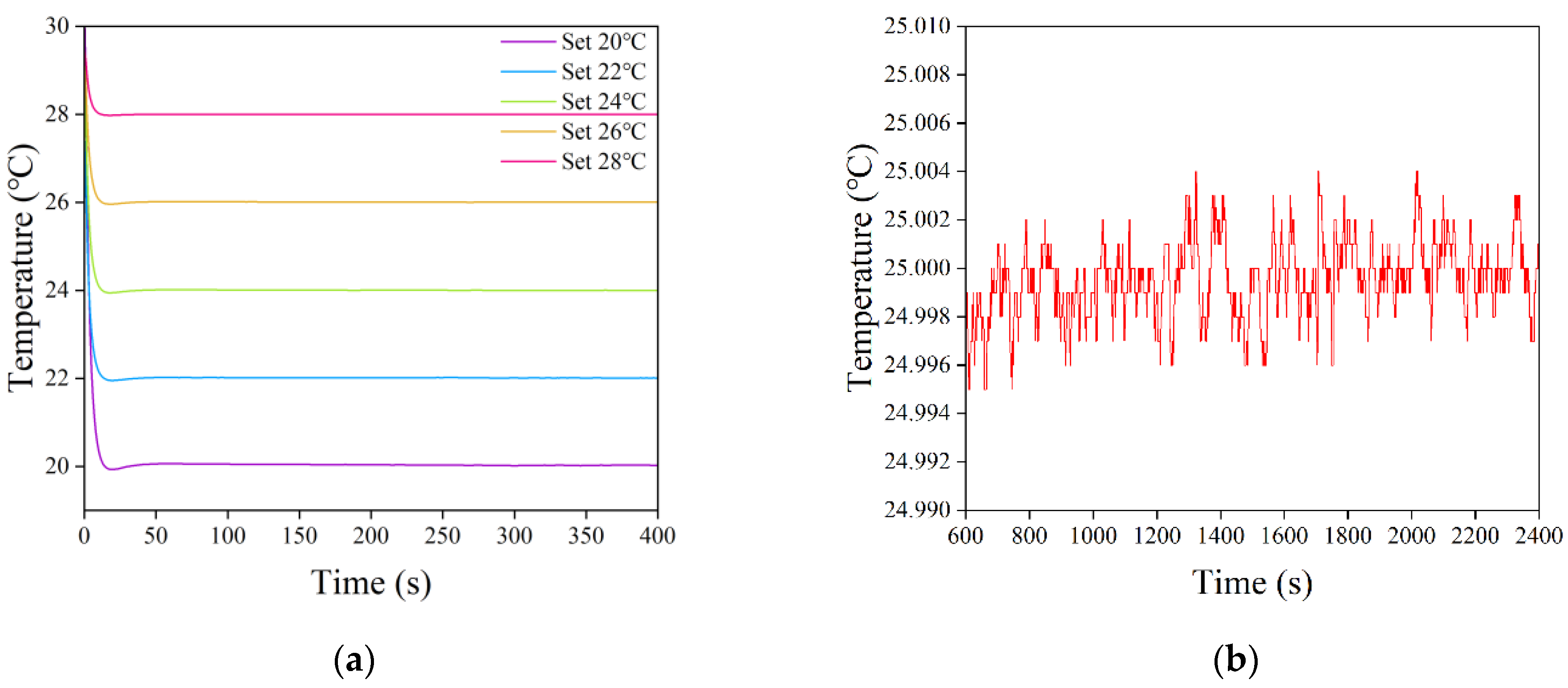
5.2. Temperature Control Experiments with Semiconductor Lasers
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dai, Q.; Song, W.; Wang, X. Design and stability analysis of high frequency LD’s driving circuit. Opt. Precis. Eng. 2006, 14, 745–748. [Google Scholar] [CrossRef]
- Zhou, Z.; Qi, Z.; Qin, Y. Design of driving method for low power semiconductor laser. Infrared Laser Eng. 2012, 41, 2689–2693. [Google Scholar] [CrossRef]
- Bae, Y. An Improved Measurement Method for the Strength of Radiation of Reflective Beam in an Industrial Optical Sensor Based on Laser Displacement Meter. Sensors 2016, 16, 752. [Google Scholar] [CrossRef] [PubMed]
- Lewicki, R.; Jahjah, M.; Ma, Y.F.; Tittel, F.K.; Stefanski, P.; Tarka, J. Mid-infrared semiconductor laser based trace gas sensor technologies for environmental monitoring and industrial process control. In Proceedings of the Conference on Quantum Sensing and Nanophotonic Devices X, San Francisco, CA, USA, 3–7 February 2013. [Google Scholar] [CrossRef]
- Elia, A.; Di Franco, C.; Lugara, P.M.; Scamarcio, G. Photoacoustic spectroscopy with quantum cascade lasers for trace gas detection. Sensors 2006, 6, 1411–1419. [Google Scholar] [CrossRef]
- Cristiano, P.; Ivo, S. Optical Fiber Sensors and Sensing Networks: Overview of the Main Principles and Applications. Sensors 2022, 22, 7554. [Google Scholar] [CrossRef]
- Chen, M.; Chen, F.; Xiao, Y. The Effect of Temperature on Semiconductor Lasers. China Sci. Technol. Inf. 2011, 3, 46–47. [Google Scholar] [CrossRef]
- Xu, W.; Yang, M.; Tang, W. Development of multifunctional laser diode driver. Infrared Laser Eng. 2004, 33, 465–468. [Google Scholar] [CrossRef]
- Sa, J.; Chen, Y.; Zhang, G.; Zhou, Z. Design of laser diode digital temperature control system. Process Autom. Instrum. 2007, 28, 23–25. [Google Scholar] [CrossRef]
- Zeng, L.; Lu, Y.; Kan, R.; Wang, Y.; Yao, L.; Xu, Z.; Ruan, J.; Yuan, S.; Zhang, L. Electronic design of a high-stable low-drift diode laser driver. Chin. J. Quantum Electron. 2014, 31, 569–575. [Google Scholar] [CrossRef]
- Zhang, A.; Zhang, Y.; Li, T. Application of Variable Domain Fuzzy PID Control in Semiconductor Laser Temperature Control System. Acta Opt. Sin. 2021, 41, 153–161. [Google Scholar] [CrossRef]
- Cheng, Q.; Deng, H. Design of Driving Circuit and Temperature Control System for Semiconductor Laser. Chin. J. Electron. Devices 2019, 42, 1185–1189. [Google Scholar] [CrossRef]
- Wang, L.; Xi, D. Design and Driving Technology of Temperature Control Circuit Based on Semiconductor Laser. Nonlinear Opt. Quantum Opt. Concepts Mod. Opt. 2020, 52, 247–258. [Google Scholar]
- Luo, L.; Hu, J.; Wang, C.; Liu, Z. Design of high-precision driving power and temperature control circuit for semiconductor laser. Laser Technol. 2017, 41, 200–204. [Google Scholar] [CrossRef]
- Zhao, Q.; Yuan, X.; Zhao, P.; Guo, F.; Zhao, C. Improvement of Circuit Design for Laser Temperature Control System Based on ADN8830. J. North Univ. China (Nat. Sci. Ed.) 2020, 41, 277–282. [Google Scholar] [CrossRef]
- Gao, H. Automatic Temperature Control of Semiconductor Laser Based on Parameter Identification. Mach. Electron. 2022, 40, 55–60. [Google Scholar]
- Xin, W.; Fang, L.; Fan, J.; Ren, Z.; Li, S.; Le, J. Double Closed-Loop Temperature Control System for Semiconductor. Meas. Control. Technol. 2022, 41, 31–36. [Google Scholar] [CrossRef]
- Su, H.; Zhu, X.; Liu, C. Design of High Precision Constant Current and Constant Temperature Driving Circuit for Semiconductor Laser. Appl. Laser 2022, 42, 139–148. [Google Scholar] [CrossRef]
- Chen, W.; Zhang, J.; Liang, J.; Deng, H. Design and Implementation of High Precision Semiconductor Laser Drive System Based on MAX1978. In Proceedings of the International Conference on Optoelectronic Materials and Devices, Guangzhou, China, 18–20 December 2020. [Google Scholar] [CrossRef]
- Xu, W.; Yang, Q.; Wang, X.; Chai, M.; Zhang, M.; Zhang, J.; Qiao, L.; Wang, T.; Gao, S. Design of High Stability Control System for Chaotic Semiconductor Lasers. Laser Optoelectron. Prog. 2021, 58, 278–292. [Google Scholar] [CrossRef]
- Wang, L.; Ye, H.; Zhao, W. Design and Simulation Algorithm of Temperature Control System of Diode Laser. Instrum. Tech. Sens. 2013, 5, 95–98. [Google Scholar] [CrossRef]
- Huang, H.; Ni, J.; Wang, H.; Zhang, J.; Gao, R.; Guan, L.; Wang, G. A novel power stability drive system of semiconductor Laser Diode for high-precision measurement. Meas. Control. 2019, 52, 462–472. [Google Scholar] [CrossRef]
- Wang, Z.; Duan, J.; Zeng, X. Research of precise temperature control systems of high-power semiconductor lasers. Laser Technol. 2015, 39, 353–356. [Google Scholar] [CrossRef]
- Zhang, G.; Huang, C. Continuously adjustable semiconductor laser diode driver with high stability. Laser Infrared 2011, 41, 160–163. [Google Scholar] [CrossRef]
- Liu, Y. Study on the Method of Semiconductor Laser Two-Level Coupling Temperature Control. Master’s Thesis, Beijing Institute of Technology, Beijing, China, 2016. [Google Scholar] [CrossRef]
- Li, C.; Song, C.; Li, S.; Yao, W. Experimental investigation of the change of semiconductor laser output wavelength corresponding to operation current. Infrared Laser Eng. 2003, 32, 144–147. [Google Scholar] [CrossRef]
- Ye, W. Analysis and Optimization of Thermal Characteristics and Thermal Stress of Tunable Semiconductor Laser Package. Master’s Thesis, Guilin University of Electronic Technology, Guilin, China, 2021. [Google Scholar] [CrossRef]
- Tian, Y.; Li, C.; Zhang, Z. High-Accuracy and High-Stability Constant Current Power for Semiconductor Lasers. J. Xi’an Jiaotong Univ. 2019, 53, 1–5. [Google Scholar] [CrossRef]
- Cong, M.; Li, L.; Cui, Y.; Zhang, Z.; Wang, Y. Design of high stability digital control driving system for semiconductor laser. Opt. Precis. Eng. 2010, 18, 1629–1636. [Google Scholar] [CrossRef]
- Yang, T.; Li, W.; Chen, W. Design of new-style driving and temperature control circuit for low power diode laser. Infrared Laser Eng. 2021, 51, 144–151. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, J. Modeling analysis and optimization design of the thermostatical control system of laser instrument of the semiconductor. Microcomput. Inf. 2008, 24, 268–270. [Google Scholar] [CrossRef]
- Liu, L.; Ding, K.; Lin, J.; Zhou, F.; Liu, C. Instrument calibration with electromagnetic method based on pseudorandom system identification. Chin. J. Sci. Instrum. 2014, 35, 1721–1728. [Google Scholar] [CrossRef]
- Ding, Q.; Yin, X. Research survey of differential evolution algorithms. CAAI Trans. Intell. Syst. 2017, 12, 431–442. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, Z.; Zhou, H.; Bi, Y. Structural optimization and algorithm design for temperature control system of mid-infrared diode laser. Optik 2020, 207, 163854. [Google Scholar] [CrossRef]
- Khan, A.; Thakur, U.N. A design of supplementary controller for UPFC to improve damping of inter-area oscillations. J. Eur. Des. Syst. Autom. 2021, 54, 303–308. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| E | EC | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | PB/NB/PS | PB/NB/NS | PM/NM/NB | PM/NM/NB | PS/NS/NB | ZO/ZO/NM | ZO/ZO/PS |
| NM | PB/NB/PS | PB/NB/NS | PM/NM/NB | PS/NS/NM | PS/NS/NM | ZO/ZO/NS | NS/ZO/ZO |
| NS | PM/NB/ZO | PM/NM/NS | PM/NS/NM | PS/NS/NM | ZO/ZO/NS | NS/PS/NS | NS/PS/ZO |
| ZO | PM/NM/ZO | PM/NM/NS | PS/NS/NS | ZO/ZO/NS | NS/PS/NS | NM/PM/NS | NM/PM/ZO |
| PS | PS/NM/ZO | PS/NS/ZO | ZO/ZO/ZO | NS/PS/ZO | NS/PS/ZO | NM/PM/ZO | NM/PB/ZO |
| PM | PS/ZO/PB | ZO/ZO/PS | NS/PS/PS | NM/PS/PS | NM/PM/PS | NM/PB/PS | NB/PB/PB |
| PB | ZO/ZO/PB | ZO/ZO/PM | NM/PS/PM | NM/PM/PM | NM/PM/PS | NB/PB/PS | NB/PB/PB |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Tian, Z.; Feng, X.; Feng, Z.; Zhu, X.; Zhou, Y. High-Precision Semiconductor Laser Current Drive and Temperature Control System Design. Sensors 2022, 22, 9989. https://doi.org/10.3390/s22249989
Zhao Y, Tian Z, Feng X, Feng Z, Zhu X, Zhou Y. High-Precision Semiconductor Laser Current Drive and Temperature Control System Design. Sensors. 2022; 22(24):9989. https://doi.org/10.3390/s22249989
Chicago/Turabian StyleZhao, Yitao, Zengguo Tian, Xiangyu Feng, Zhengyuan Feng, Xuguang Zhu, and Yiqun Zhou. 2022. "High-Precision Semiconductor Laser Current Drive and Temperature Control System Design" Sensors 22, no. 24: 9989. https://doi.org/10.3390/s22249989
APA StyleZhao, Y., Tian, Z., Feng, X., Feng, Z., Zhu, X., & Zhou, Y. (2022). High-Precision Semiconductor Laser Current Drive and Temperature Control System Design. Sensors, 22(24), 9989. https://doi.org/10.3390/s22249989