
Surrogate-Model-Based Interval Analysis of Spherical Conformal Array Antenna with Power Pattern Tolerance



Abstract
1. Introduction
2. Materials Formula
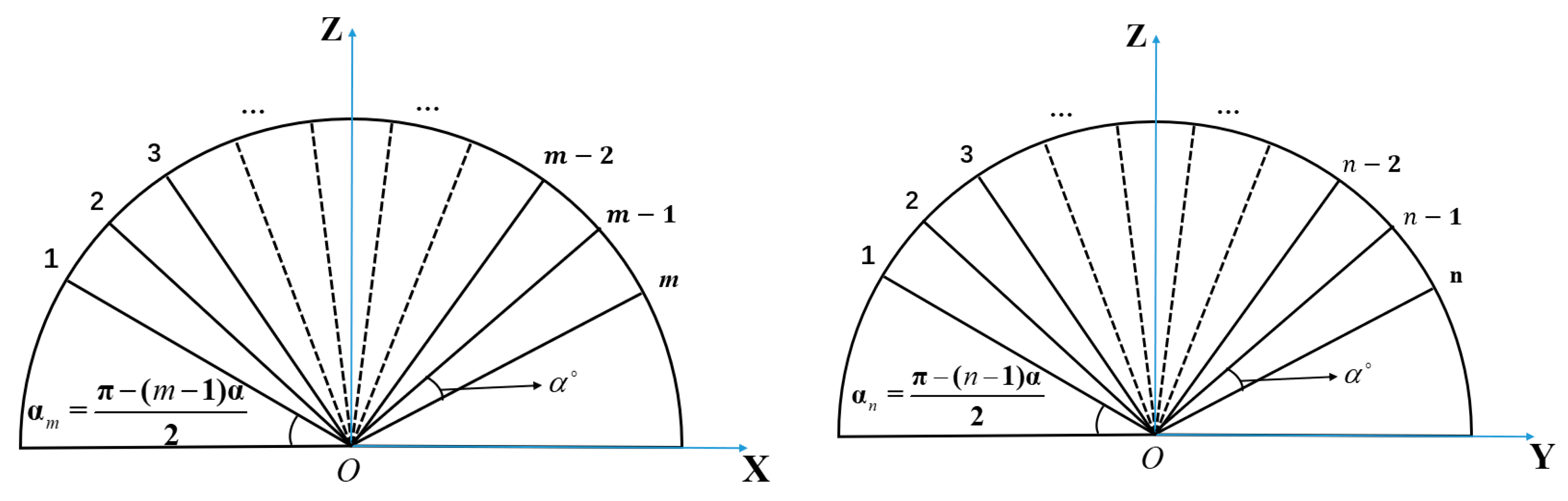
2.1. Array Factors of Spherical CAAs
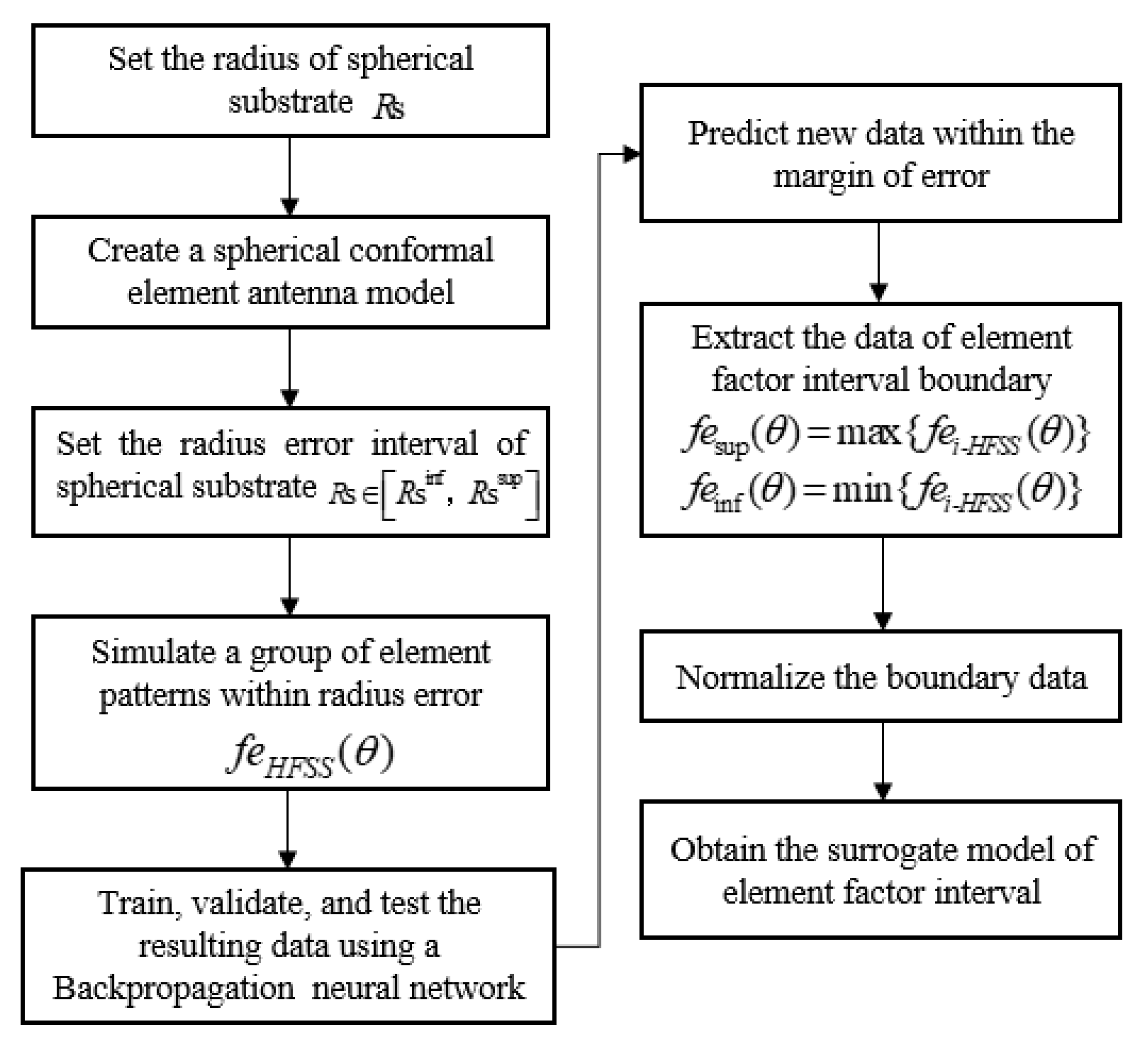
2.2. Establishment of Element Factor Interval Surrogate Model Based on Machine Learning
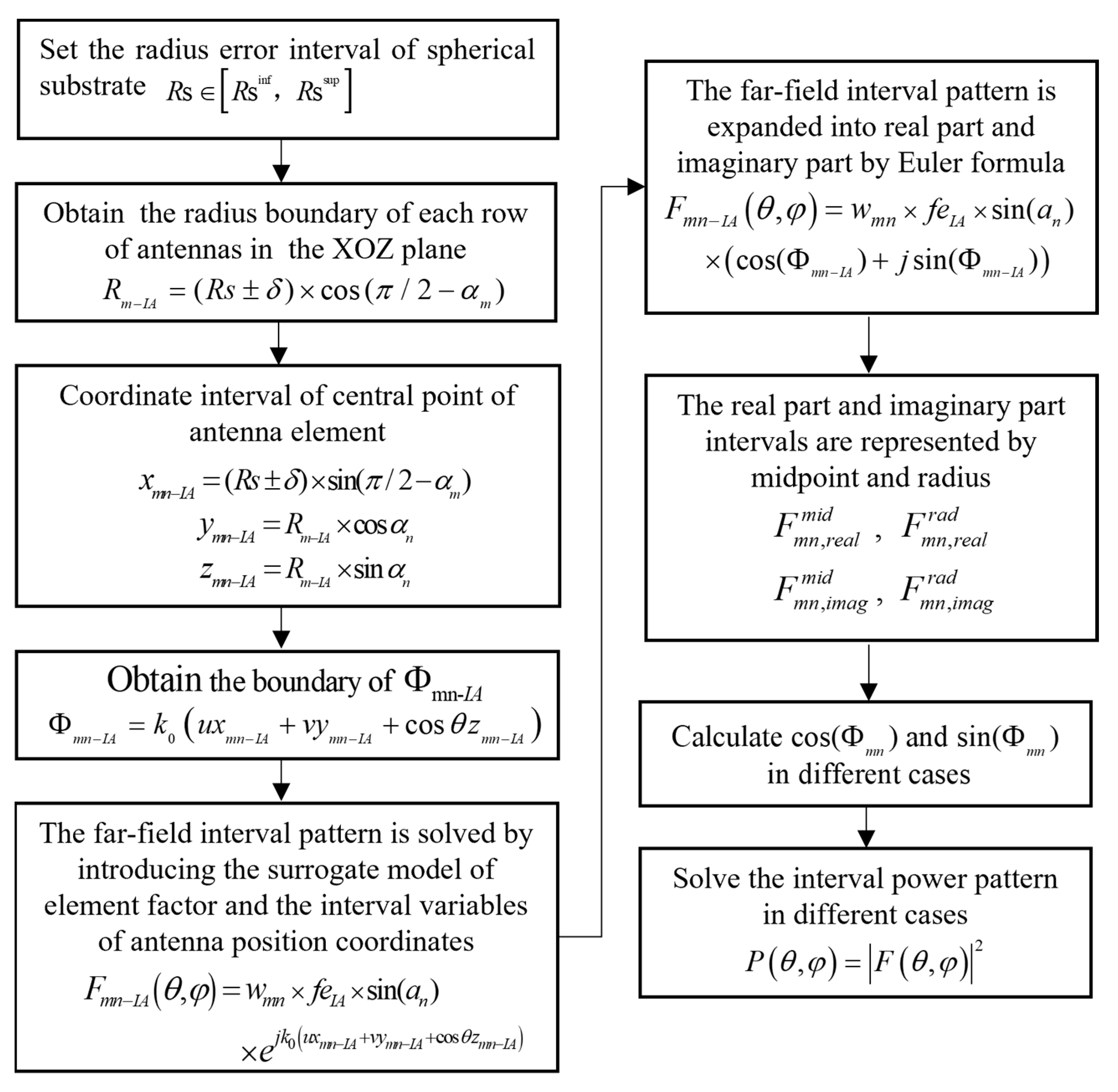
2.3. Internal Power Pattern of Spherical CAAs
3. Numerical Examples of Verification
3.1. Verification of Spherical Element Factors
3.2. Verification of Planar Arrays
3.3. Verification of Spherical Array
3.4. Verification of Linear/Planar Arrays Interval Analysis
3.5. Verification of Conformal Arrays Interval Analysis
4. Tolerance Analysis of Spherical CAAs with Error Interval
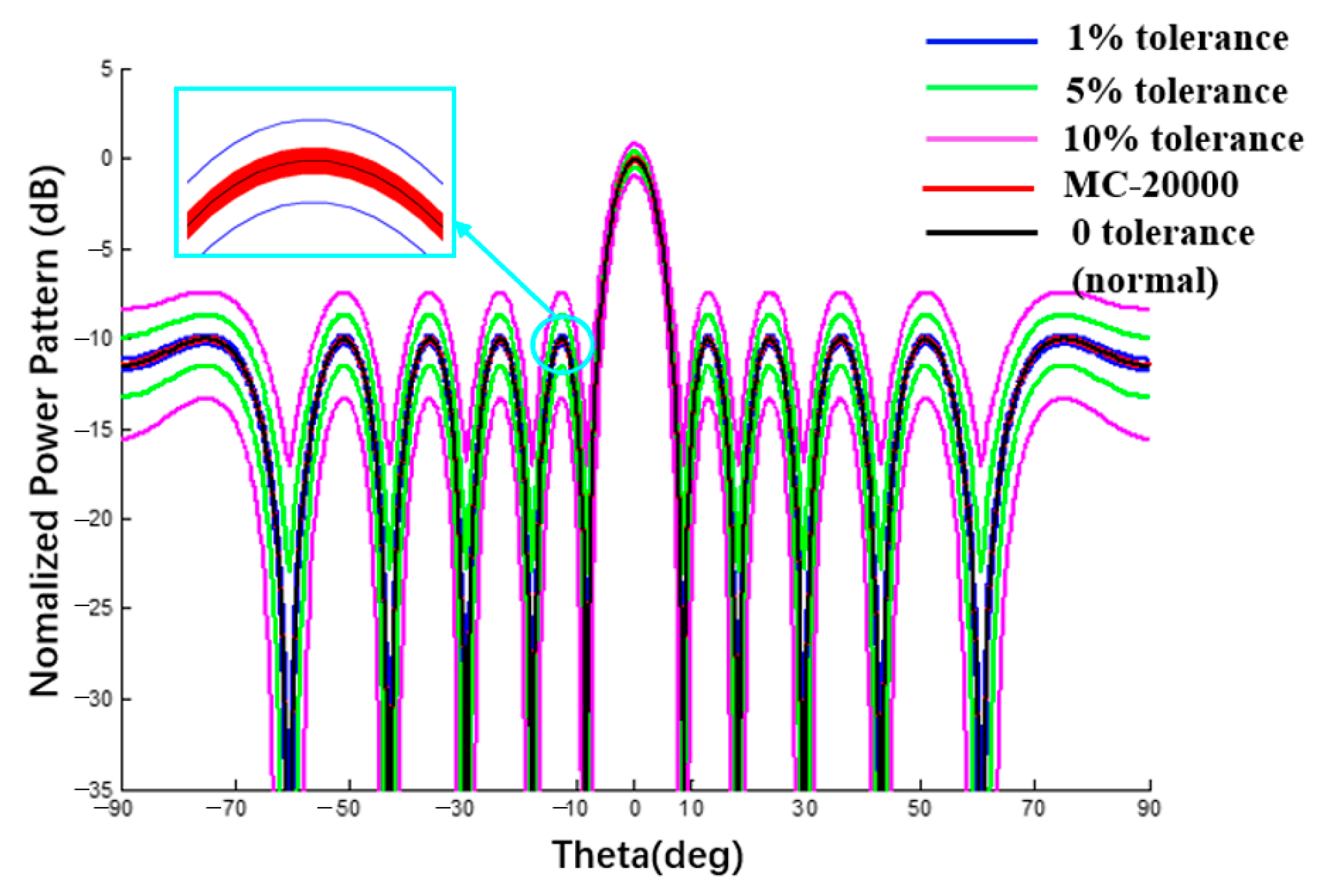
4.1. Tolerance Analysis of Spherical CAA with Radius Error Interval
4.2. Tolerance Analysis of Spherical CAA with Excitation Amplitude Error Interval
4.3. Tolerance Analysis of Spherical CAA with Excitation Phase Error Interval
4.4. Spherical CAAs with Different Radii
4.5. Influence of Element and Array Factors on Interval of Array Antenna Pattern
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Albagory, Y. An Efficient Conformal Stacked Antenna Array Design and 3D-Beamforming for UAV and Space Vehicle Communications. Sensors 2021, 21, 1362. [Google Scholar] [CrossRef] [PubMed]
- Ogurtsov, S.; Koziel, S. A Conformal Circularly Polarized Series-Fed Microstrip Antenna Array Design. IEEE Trans. Antennas Propag. 2019, 68, 873–881. [Google Scholar] [CrossRef]
- Pelham, T.; Hilton, G.; Mellios, E.; Lewis, R. Predicting Conformal Aperture Gain From 3-D Aperture and Platform Models. IEEE Antennas Wirel. Propag. Lett. 2017, 16, 700–703. [Google Scholar] [CrossRef]
- Jilani, S.F.; Munoz, M.O.; Abbasi, Q.H.; Alomainy, A. Millimeter-Wave Liquid Crystal Polymer Based Conformal Antenna Array for 5G Applications. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 84–88. [Google Scholar] [CrossRef]
- Yang, H.; Liu, X.; Fan, Y. Design of Broadband Circularly Polarized All-Textile Antenna and Its Conformal Array for Wearable Devices. IEEE Trans. Antennas Propag. 2021, 70, 209–220. [Google Scholar] [CrossRef]
- Peng, J.-J.; Qu, S.-W.; Xia, M.; Yang, S. Conformal Phased Array Antenna for Unmanned Aerial Vehicle With ±70° Scanning Range. IEEE Trans. Antennas Propag. 2021, 69, 4580–4587. [Google Scholar] [CrossRef]
- Chapman, A.J.; Fenn, A.J.; Dufilie, P. Compact Cavity-Backed Discone Array for Conformal Omnidirectional Antenna Applications. In Proceedings of the 2020 IEEE International Symposium on Antennas and Propagation and North American Radio Science Meeting, Montreal, QC, Canada, 5–10 July 2020; pp. 657–658. [Google Scholar]
- Hussain, S.; Qu, S.; Zhang, P.; Wang, X.; Yang, S. A Low-Profile, Wide-Scan, Cylindrically Conformal X-Band Phased Array. IEEE Antennas Wirel. Propag. Lett. 2021, 20, 1503–1507. [Google Scholar] [CrossRef]
- Lin, H.S.; Cheng, Y.J.; Wu, Y.F.; Fan, Y. Height Reduced Concave Sector-Cut Spherical Conformal Phased Array Antenna Based on Distributed Aperture Synthesis. IEEE Trans. Antennas Propag. 2021, 69, 6509–6517. [Google Scholar] [CrossRef]
- Boyuan, M.; Pan, J.; Wang, E.; Luo, Y. Conformal Bent Dielectric Resonator Antennas With Curving Ground Plane. IEEE Trans. Antennas Propag. 2019, 67, 1931–1936. [Google Scholar] [CrossRef]
- Ramadan, M.; Dahle, R. Characterization of 3-D Printed Flexible Heterogeneous Substrate Designs for Wearable Antennas. IEEE Trans. Antennas Propag. 2019, 67, 2896–2903. [Google Scholar] [CrossRef]
- Wang, C.; Li, P.; Xu, W.; Song, L.; Huang, J. Tolerance analysis of 3D printed patch antennas based on interval arithmetic. Microw. Opt. Technol. Lett. 2020, 63, 516–524. [Google Scholar] [CrossRef]
- Rocca, P.; Anselmi, N.; Benoni, A.; Massa, A. Probabilistic Interval Analysis for the Analytic Prediction of the Pattern Tolerance Distribution in Linear Phased Arrays With Random Excitation Errors. IEEE Trans. Antennas Propag. 2020, 68, 7866–7878. [Google Scholar] [CrossRef]
- He, G.; Gao, X.; Zhou, H. Matrix-Based Interval Arithmetic for Linear Array Tolerance Analysis With Excitation Amplitude Errors. IEEE Trans. Antennas Propag. 2019, 67, 3516–3520. [Google Scholar] [CrossRef]
- Ruze, J. The effect of aperture errors on the antenna radiation pattern. Il Nuovo Cimento 1952, 9, 364–380. [Google Scholar] [CrossRef]
- Ruze, J. Antenna tolerance theory—A review. Proc. IEEE 1996, 54, 633–640. [Google Scholar] [CrossRef]
- Gilbert, E.N.; Morgan, S.P. Optimum Design of Directive Antenna Arrays Subject to Random Variations. Bell Syst. Tech. J. 1955, 34, 637–663. [Google Scholar] [CrossRef]
- Elliott, R. Mechanical and electrical tolerances for two-dimensional scanning antenna arrays. IRE Trans. Antennas Propag. 1958, 6, 114–120. [Google Scholar] [CrossRef]
- Rahmat-Samii, Y. An efficient computational method for characterizing the effects of random surface errors on the average power pattern of reflectors. IEEE Trans. Antennas Propag. 1983, 31, 92–98. [Google Scholar] [CrossRef]
- Ling, H.; Lo, Y.; Rahmat-Samii, Y. Reflector sidelobe degradation due to random surface errors. IRE Trans. Antennas Propag. 1986, 34, 164–172. [Google Scholar] [CrossRef]
- Hsiao, J.K. Normalized relationship among errors and sidelobe levels. Radio Sci. 1984, 19, 292–302. [Google Scholar] [CrossRef]
- Hsiao, J. Design of error tolerance of a phased array. Electron. Lett. 1985, 21, 834–836. [Google Scholar] [CrossRef]
- Rocca, P. Interval arithmetic for pattern tolerance analysis of parabolic reectors. IEEE Trans. Antennas Propag. 2014, 62, 4952–4960. [Google Scholar] [CrossRef]
- Rocca, P.; Manica, L.; Massa, A. Interval-based analysis of pattern distortions in reflector antennas with bump-like surface deformations. IET Microwaves, Antennas Propag. 2014, 8, 1277–1285. [Google Scholar] [CrossRef]
- Anselmi, N.; Manica, L.; Rocca, P.; Massa, A. Tolerance analysis of reconfigurable monopulse linear antenna arrays using interval arithmetic. In Proceedings of the 8th European Conference on Antennas and Propagation, The Hague, The Netherlands, 6–11 April 2014; pp. 1509–1512. [Google Scholar] [CrossRef]
- Anselmi, N.; Salucci, M.; Rocca, P.; Massa, A. Generalised interval-based analysis tool for pattern distortions in reflector antennas with bump-like surface deformations. IET Microwaves, Antennas Propag. 2016, 10, 909–916. [Google Scholar] [CrossRef]
- Carlin, M.; Anselmi, N.; Manica, L.; Rocca, P.; Massa, A. Exploiting Interval Arithmetic for predicting real arrays performances—The linear case. In Proceedings of the IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, Orlando, FL, USA, 7–13 July 2013; pp. 298–299. [Google Scholar]
- Anselmi, N.; Manica, L.; Rocca, P.; Massa, A. Tolerance Analysis of Antenna Arrays Through Interval Arithmetic. IEEE Trans. Antennas Propag. 2013, 61, 5496–5507. [Google Scholar] [CrossRef]
- Rocca, P.; Manica, L.; Anselmi, N.; Massa, A. Analysis of the Pattern Tolerances in Linear Arrays With Arbitrary Amplitude Errors. IEEE Antennas Wirel. Propag. Lett. 2013, 12, 639–642. [Google Scholar] [CrossRef]
- Poli, L.; Rocca, P.; Anselmi, N.; Massa, A. Dealing With Uncertainties on Phase Weighting of Linear Antenna Arrays by Means of Interval-Based Tolerance Analysis. IEEE Trans. Antennas Propag. 2015, 63, 3229–3234. [Google Scholar] [CrossRef]
- Anselmi, N.; Salucci, M.; Rocca, P.; Massa, A. Power Pattern Sensitivity to Calibration Errors and Mutual Coupling in Linear Arrays through Circular Interval Arithmetics. Sensors 2016, 16, 791. [Google Scholar] [CrossRef]
- Li, P.; Xu, W.; Yang, D. An Inversion Design Method for the Radome Thickness Based on Interval Arithmetic. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 658–661. [Google Scholar] [CrossRef]
- Li, P.; Pedrycz, W.; Xu, W.; Song, L. Far-Field Pattern Tolerance Analysis of the Antenna-Radome System With the Material Thickness Error: An Interval Arithmetic Approach. IEEE Trans. Antennas Propag. 2017, 65, 1934–1946. [Google Scholar] [CrossRef]
- Li, P.; Wang, C.; Xu, W.; Song, L. Taylor Expansion and Matrix-Based Interval Analysis of Linear Arrays With Patch Element Pattern Tolerance. IEEE Access 2021, 9, 21004–21015. [Google Scholar] [CrossRef]
- Balanis, C.A. Antenna Theory: Analysis and Design, 3rd ed.; Harper & Row: New York, NY, USA, 1982. [Google Scholar]
- Josefsson, L.; Persson, P. Conformal Array Antenna Theory and Design; Wiley: Hoboken, NJ, USA, 2006; pp. 17–20. [Google Scholar] [CrossRef]
- Hu, N.; Duan, B.; Xu, W.; Zhou, J. A New Interval Pattern Analysis Method of Array Antennas Based on Taylor Expansion. IEEE Trans. Antennas Propag. 2017, 65, 6151–6156. [Google Scholar] [CrossRef]
- Chaudhary, V.; Panwar, R. FSS Derived Using a New Equivalent Circuit Model Backed Deep Neural Network. IEEE Antennas Wirel. Propag. Lett. 2021, 20, 1963–1967. [Google Scholar] [CrossRef]
- Gargantini, I.; Henrici, P. Circular arithmetic and the determination of polynomial zeros. Numer. Math. 1971, 18, 305–320. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Theta (Deg) | BP Results | Δ | This Work | Δ |
|---|---|---|---|---|
| −60 | [0.507; 0.540] | 0.033 | [0.507; 0.541] | 0.034 |
| −30 | [0.847; 0.868] | 0.021 | [0.843; 0.870] | 0.027 |
| 0 | [0.993; 1.015] | 0.022 | [0.991; 1.020] | 0.029 |
| 30 | [0.850; 0.869] | 0.019 | [0.850; 0.870] | 0.020 |
| 60 | [0.489; 0.536] | 0.047 | [0.487; 0.541] | 0.054 |
| SLL(dB) | Amplitude Error | Line Array (Figure 13) | ΔL | Curvilinear Array (Figure 15) | ΔC | [28] | Δ |
|---|---|---|---|---|---|---|---|
| −10 | 1% | [−10.28; −9.64] | 0.64 | [−3.08; −2.58] | 0.50 | [−10.29; −9.68] | 0.61 |
| 5% | [−11.51; −8.42] | 3.09 | [−4.15; −1.62] | 2.53 | [−11.49; −8.43] | 3.06 | |
| 10% | [−13.11; −6.89] | 6.22 | [−5.56; −0.53] | 5.03 | [−13.10; −6.96] | 6.14 |
| SLL (dB) | Phase Error | Line Array (Figure 14) | ΔL | Curvilinear Array (Figure 16) | ΔC | [30] | Δ |
|---|---|---|---|---|---|---|---|
| −20 | 2° | [−21.06; −18.92] | 2.14 | [−3.30; −1.91] | 1.39 | [−20.58; −18.42] | 2.16 |
| 5° | [−26.30; −15.97] | 10.33 | [−4.50; −0.99] | 3.51 | [−25.45; −14.81] | 10.64 |
| Radius Error | ±0.5 mm | Δ0.5 | ±1.0 mm | Δ1.0 | ±1.5 mm | Δ1.5 | |
|---|---|---|---|---|---|---|---|
| Main 0 dB | This Work | [−0.66; 0.66] | 1.32 | [−1.05; 1.02] | 2.07 | [−1.52; 1.37] | 2.89 |
| MC | [−0.13; 0.14] | 0.27 | [−0.23; 0.28] | 0.51 | [−0.38; 0.42] | 0.80 | |
| 1st −3.09 dB | This Work | [−3.80; −2.35] | 1.45 | [−4.34; −1.87] | 2.47 | [−4.90; −1.42] | 3.48 |
| MC | [−3.26; −2.92] | 0.34 | [−3.40; −2.74] | 0.66 | [−3.57; −2.60] | 0.97 | |
| Amplitude Error | 1% | Δ1% | 3% | Δ3% | 5% | Δ5% | |
|---|---|---|---|---|---|---|---|
| Main 0 dB | This Work | [−0.29; 0.28] | 0.57 | [−0.90; 0.83] | 1.73 | [−1.55; 1.34] | 2.89 |
| MC | [−0.09; 0.09] | 0.18 | [−0.26; 0.26] | 0.52 | [−0.44; 0.43] | 0.87 | |
| 1st −2.63 dB | This Work | [−2.95; −2.31] | 0.64 | [−3.62; −1.68] | 1.94 | [−4.29; −1.08] | 3.21 |
| MC | [−2.71; −2.54] | 0.17 | [−2.89; −2.37] | 0.52 | [−3.07; −2.20] | 0.87 | |
| Phase Error | 1 Deg | Δ1 Deg | 2 Deg | Δ2 Deg | 3 Deg | Δ3 Deg | |
|---|---|---|---|---|---|---|---|
| Main 0dB | This Work | [−0.33; 0.31] | 0.64 | [−0.67; 0.61] | 1.28 | [−1.03; 0.90] | 1.93 |
| MC | [−0.13; 0.13] | 0.26 | [−0.26; 0.26] | 0.52 | [−0.41; 0.38] | 0.79 | |
| 1st −2.63dB | This Work | [−3.01; −2.25] | 0.76 | [−3.41; −1.89] | 1.52 | [−3.81; −1.54] | 2.27 |
| MC | [−2.75; −2.52] | 0.23 | [−2.84; −2.42] | 0.42 | [−2.94; −2.32] | 0.62 | |
| Lobe | Array + Element Tolerance | ΔAE | Array Factor Tolerance | ΔA | Element Factor Tolerance | ΔE | ΔA/ΔAE | ΔE/ΔAE |
|---|---|---|---|---|---|---|---|---|
| Main | [−0.76; 0.77] | 1.53 | [−0.46; 0.43] | 0.89 | [−0.08; 0.16] | 0.24 | 58.2% | 15.7% |
| 1st | [−1.94; −0.52] | 1.42 | [−1.71; −0.79] | 0.92 | [−1.29; −1.11] | 0.18 | 64.8% | 12.7% |
| 2nd | [−3.51; −2.11] | 1.40 | [−3.26; −2.39] | 0.87 | [−2.84; −2.69] | 0.15 | 62.1% | 10.7% |
| 3rd | [−10.41; −8.11] | 2.30 | [−9.75; −8.66] | 1.09 | [−9.31; −9.08] | 0.23 | 47.4% | 10.0% |
| 4th | [−21.55; −14.94] | 6.61 | [−18.41; −17.20] | 1.21 | [−18.29; −17.68] | 0.61 | 18.3% | 9.2% |
| Lobe | Array + Element Tolerance | ΔAE | Array Factor Tolerance | ΔA | Element Factor Tolerance | ΔE | ΔA/ΔAE | ΔE/ΔAE |
|---|---|---|---|---|---|---|---|---|
| Main | [−1.33; 1.32] | 2.65 | [−0.68; 0.68] | 1.36 | [−0.08; 0.16] | 0.24 | 51.3% | 9.1% |
| 1st | [−1.26; 1.08] | 2.34 | [−0.80; 0.59] | 1.39 | [−0.16; 0.03] | 0.19 | 59.4% | 8.1% |
| 2nd | [−2.90; −0.27] | 2.63 | [−2.30; −0.82] | 1.48 | [−1.61; −1.42] | 0.19 | 56.3% | 7.2% |
| 3rd | [−10.12; −5.92] | 4.20 | [−8.90; −6.98] | 1.92 | [−8.10; −7.86] | 0.24 | 45.7% | 5.7% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, G.; Li, P.; Rocca, P.; Chang, J.; Xu, W. Surrogate-Model-Based Interval Analysis of Spherical Conformal Array Antenna with Power Pattern Tolerance. Sensors 2022, 22, 9828. https://doi.org/10.3390/s22249828
Ding G, Li P, Rocca P, Chang J, Xu W. Surrogate-Model-Based Interval Analysis of Spherical Conformal Array Antenna with Power Pattern Tolerance. Sensors. 2022; 22(24):9828. https://doi.org/10.3390/s22249828
Chicago/Turabian StyleDing, Guangda, Peng Li, Paolo Rocca, Jiantao Chang, and Wanye Xu. 2022. "Surrogate-Model-Based Interval Analysis of Spherical Conformal Array Antenna with Power Pattern Tolerance" Sensors 22, no. 24: 9828. https://doi.org/10.3390/s22249828
APA StyleDing, G., Li, P., Rocca, P., Chang, J., & Xu, W. (2022). Surrogate-Model-Based Interval Analysis of Spherical Conformal Array Antenna with Power Pattern Tolerance. Sensors, 22(24), 9828. https://doi.org/10.3390/s22249828