
Retrieval of Suspended Sediment Concentration from Bathymetric Bias of Airborne LiDAR


Abstract
1. Introduction
2. Methods
2.1. Waveform Decomposition Method
2.2. Measurement Bias Method
3. Experiment and Results
3.1. Research Area and Data Acquisition
3.2. Data Preparation
3.3. SSC Modeling and Verification
3.4. SSC Inversion
4. Discussion
4.1. Comparison Methods
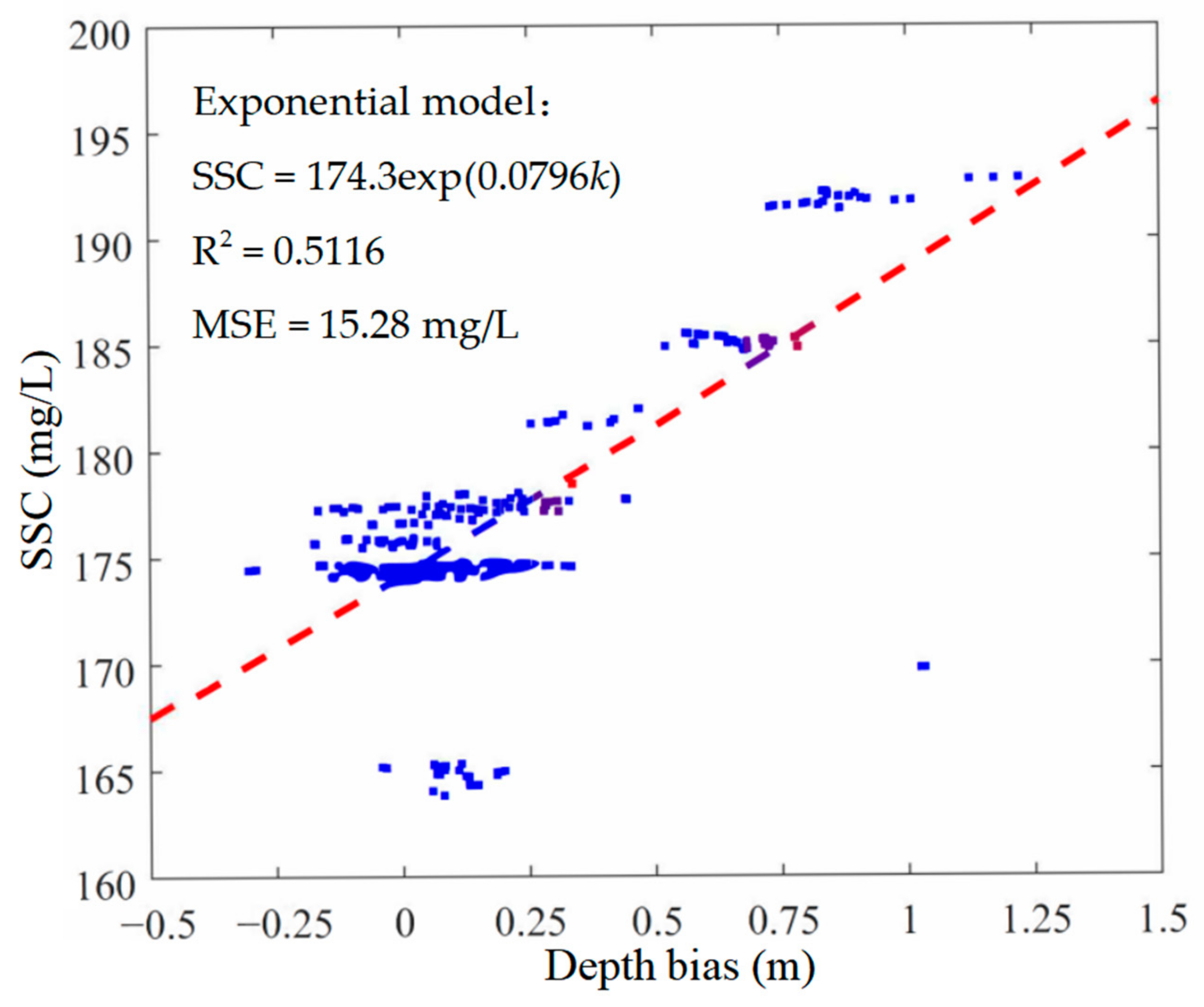
4.1.1. Exponential SSC Regression Model of Depth Bias
4.1.2. Waveform Decomposition Method
- (1)
- Waveform extractionThe raw laser waveforms collected by ALB systems are usually stored in binary files to save storage space. The raw data files must be decoded according to the data file format to extract all useful parameters and raw waveform data.
- (2)
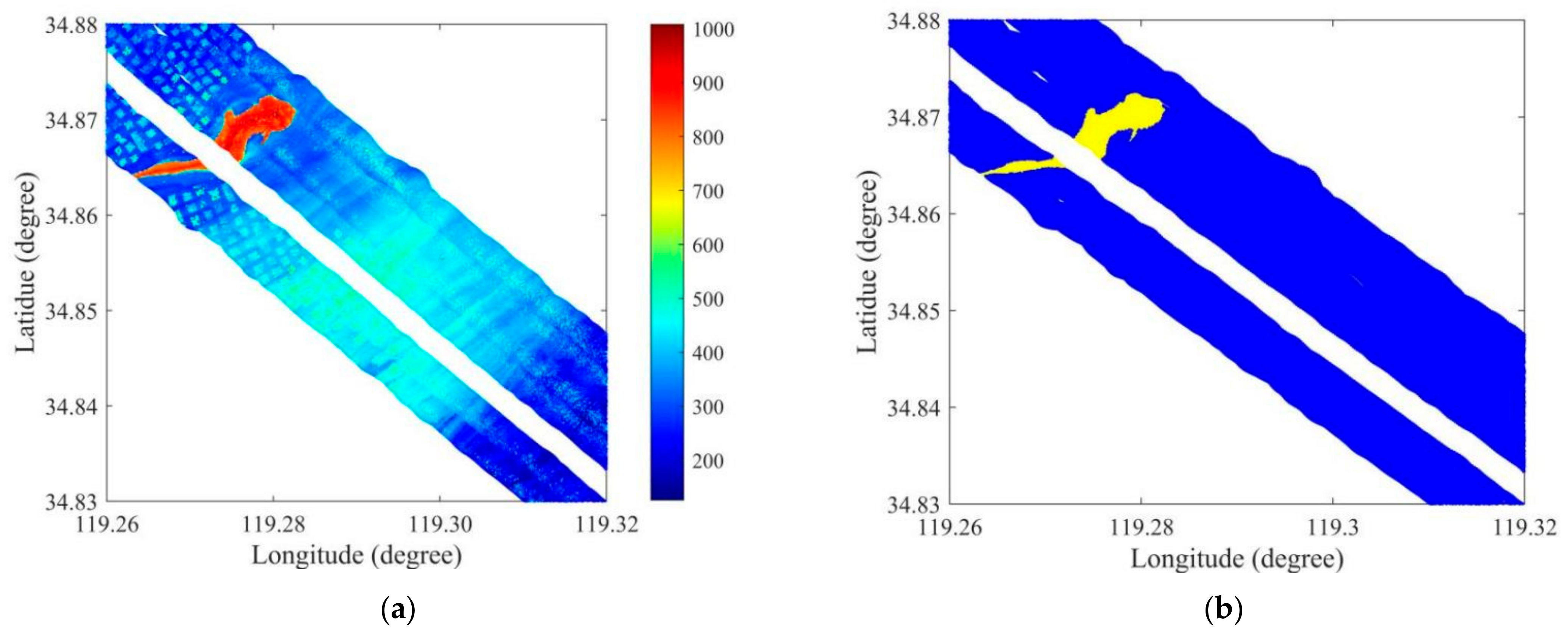
- Ocean-land waveform classificationALB systems can realize integrated ocean and land measurements based on the received laser pulse returns reflected from the ocean and land. Ocean-land waveform classification should be conducted to identify the ocean waveforms from the raw collected waveforms. Ocean-land waveform classification methods have been summarized and the dual-clustering method has been proposed as an effective method, with high accuracy for dual-wavelength ALB systems [35]. The dual-clustering method was used for ocean-land waveform classification in this study. The amplitudes of the IR waveforms were calculated and these are shown in Figure 8a. The yellow and blue colors in Figure 8b represent the spatial distributions of the obtained land and ocean waveforms, respectively.
- (3)
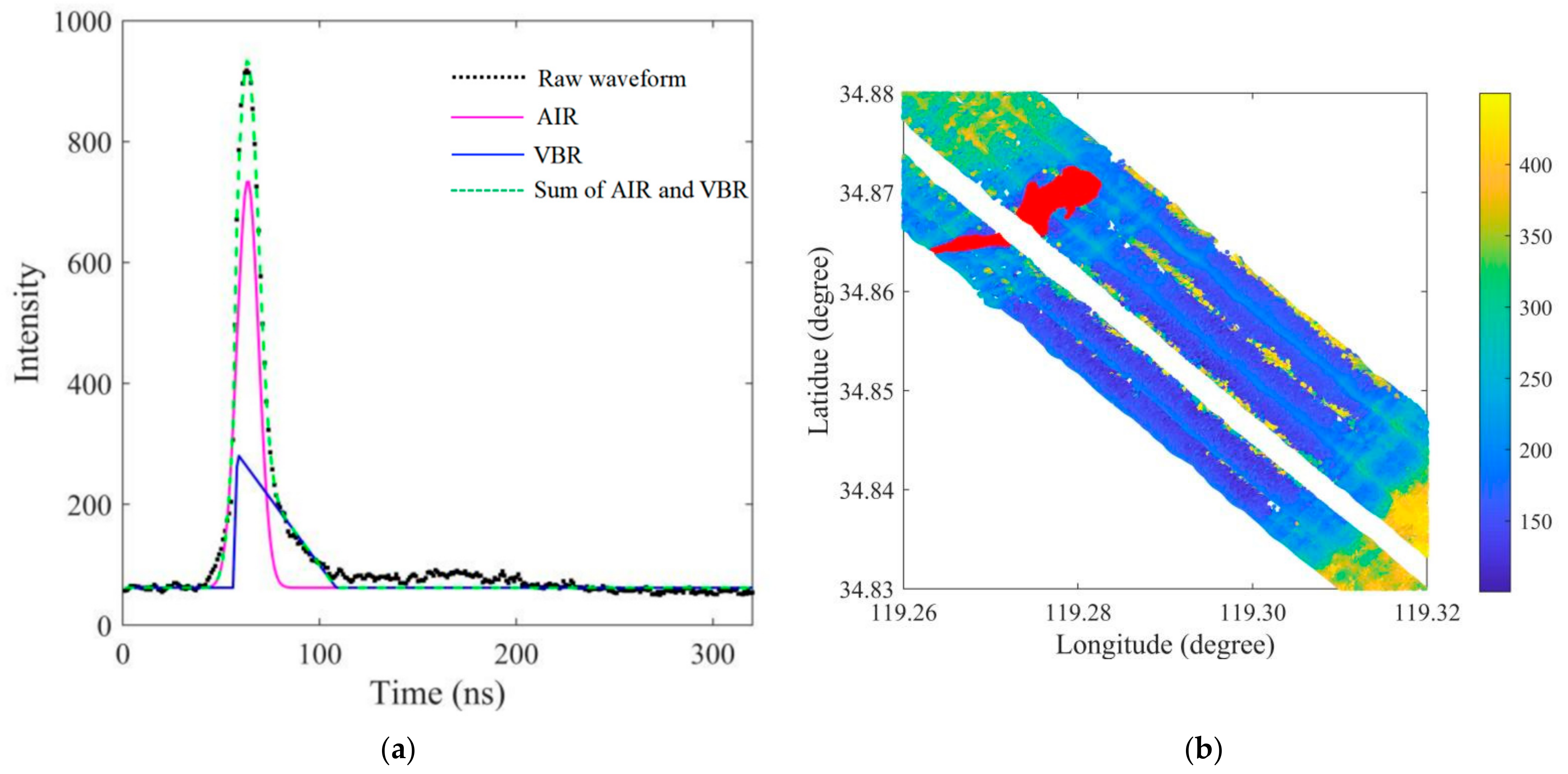
- Ocean waveform decompositionWaveform decomposition, which is achieved by fitting the mathematical waveform model to raw green waveforms using a nonlinear fitting approach, is a powerful tool to extract the VBR from raw bathymetric waveforms. An improved AVB decomposition method—setting reasonable lower and upper bounds of waveform parameters—has been proposed to guarantee the fidelity of the decomposed components [23]. The AVB decomposition method was performed on the ocean waveforms classified in step 2 to extract the VBR of each pulse waveform. Figure 9a shows the waveform decomposition results for a typical bathymetric waveform in the research area. The black discrete points represent the pulse return intensity with a sampling period of 1 ns. The magenta and blue curves represent the AIR and VBR, respectively. The green dotted line represents the sum of the AIR and VBR. The bottom return is missing in the raw waveform because of the high turbidity. The distribution of the amplitudes of the extracted VBRs for the entire research area is shown in Figure 9b. Although the AVB decomposition method has shown its effectiveness for VBR extraction [10], the decomposition accuracy of some waveforms was low and should be improved further, e.g., the amplitudes of VBRs at the edge of some strips shown in Figure 9b were significantly larger than those of the adjacent areas.
- (4)
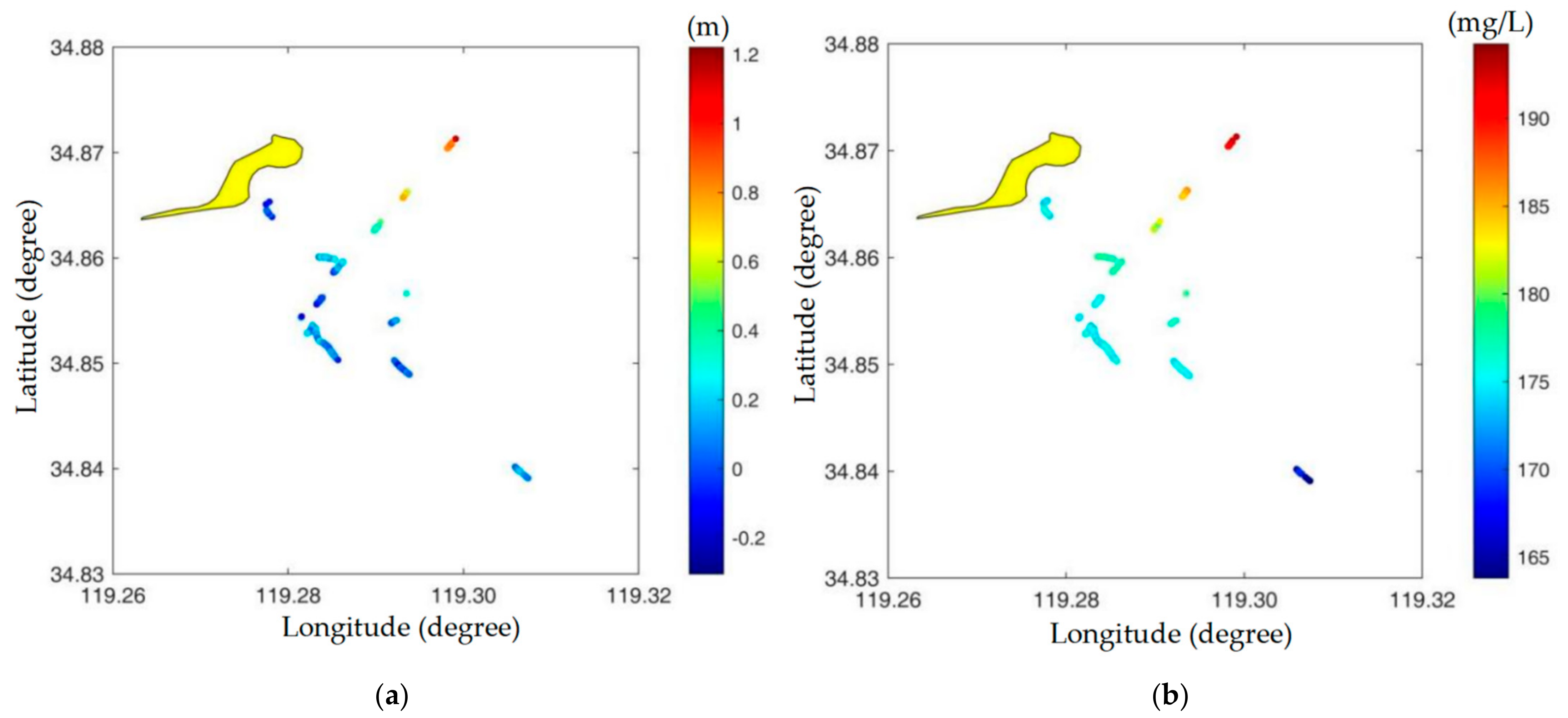
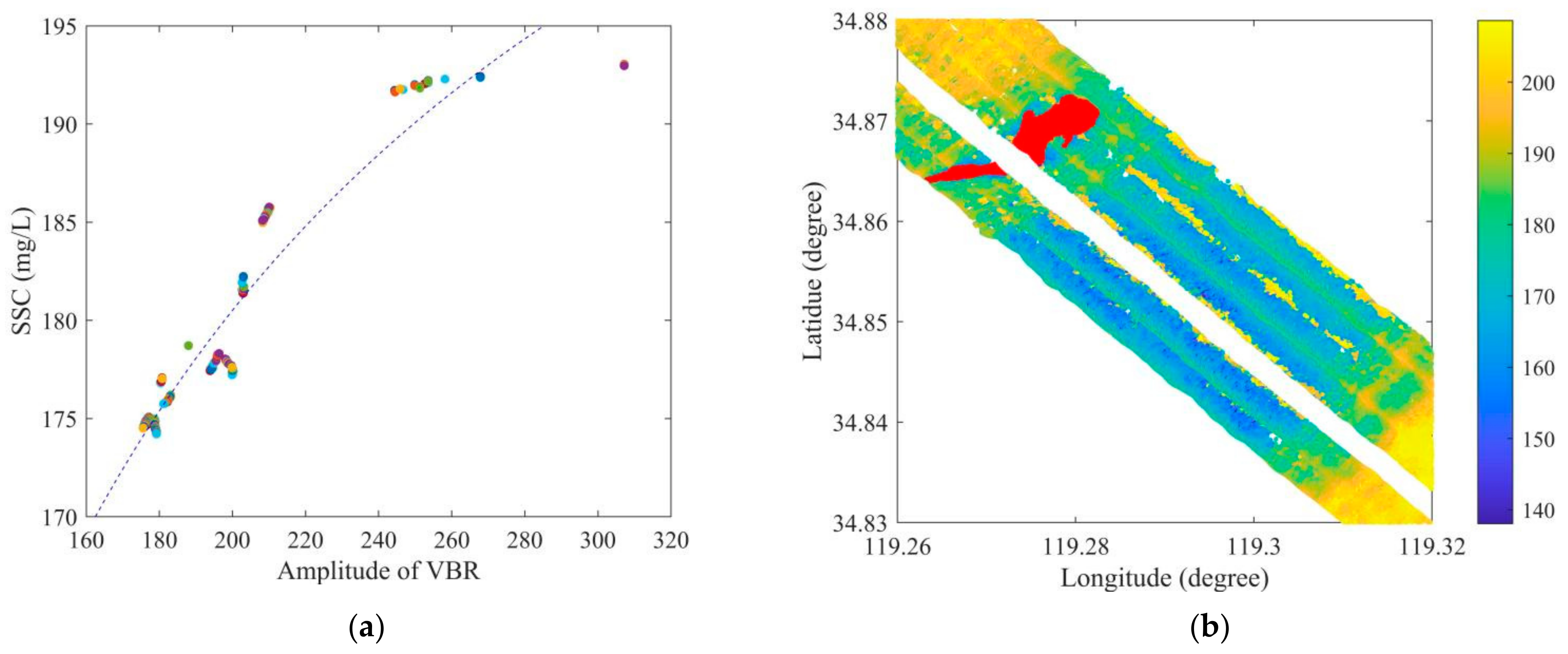
- Empirical model construction and SSC retrievalThe SSCs at the positions of the previously described point pairs and corresponding amplitudes of VBRs are shown in Figure 10a. The results showed that the SSCs and VBR amplitudes presented a positive correlation. A power function was used to build an SSC model of the VBR amplitude, similarly to Equation (10), based on the least-squares method. As indicated by the blue dotted line in Figure 10a, the fitted-power empirical SSC model of the VBR amplitude is expressed as follows:where μ is the amplitude of VBR. The MSE and R2 of the SSC retrieval model of VBR amplitude were 2.28 mg/L and 0.906, respectively. The distribution of the SSC of the entire research area could be retrieved by inputting the VBR amplitudes extracted via waveform decomposition (Figure 9b) into the SSC retrieval model (Equation (12)). Compared with exponential regression and ANN-based SSC models of ALB depth bias, the waveform decomposition method showed a higher SSC retrieval accuracy. The shortcomings of the waveform decomposition method are that it comprises complex waveform processing procedures and the laser waveforms are not always available for users.In summary, the MSEs of the exponential SSC regression model of depth bias, the power SSC regression model of VBR amplitude, and the proposed ANN-based SSC model of depth bias were 15.28, 2.28, and 2.564 mg/L, respectively. The waveform decomposition method presented the highest SSC retrieval accuracy among the three SSC models. The accuracy of the ANN-based SSC model of depth bias was higher than that of the exponential regression SSC model of depth bias because the neural network was able to build more precise connections between ALB depth bias and SSC than the traditional regression method.
4.2. Advantages and Limitations
4.3. Generalization Ability
5. Conclusions and Suggestions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A


References
- Volpe, V.; Silvestri, S.; Marani, M. Remote sensing retrieval of suspended sediment concentration in shallow waters. Remote Sens. Environ. 2011, 115, 44–54. [Google Scholar] [CrossRef]
- Ouillon, S.; Douillet, P.; Andréfouët, S. Coupling satellite data with in situ measurements and numerical modeling to study fine suspended-sediment transport: A study for the lagoon of New Caledonia. Coral Reefs 2004, 23, 109–122. [Google Scholar] [CrossRef]
- Cao, B.; Qiu, J.; Zhang, W.; Xie, X.; Lu, X.; Yang, X.; Li, H. Retrieval of Suspended Sediment Concentrations in the Pearl River Estuary Using Multi-Source Satellite Imagery. Remote Sens. 2022, 14, 3896. [Google Scholar] [CrossRef]
- Zhang, M.; Dong, Q.; Cui, T.; Xue, C.; Zhang, S. Suspended sediment monitoring and assessment for Yellow River estuary from Landsat TM and ETM+ imagery. Remote Sens. Environ. 2014, 146, 136–147. [Google Scholar] [CrossRef]
- Peterson, K.T.; Sagan, V.; Sidike, P.; Cox, A.L.; Martinez, M. Suspended Sediment Concentration Estimation from Landsat Imagery along the Lower Missouri and Middle Mississippi Rivers Using an Extreme Learning Machine. Remote Sens. 2018, 10, 1503. [Google Scholar] [CrossRef]
- Montanher, O.C.; Novo, E.M.; Barbosa, C.C. Empirical models for estimating the suspended sediment concentration in Amazonian white water rivers using Landsat 5/TM. Int. J. Appl. Earth Obs. 2014, 29, 67–77. [Google Scholar] [CrossRef]
- Peppa, M.; Vasilakos, C.; Kavroudakis, D. Eutrophication Monitoring for Lake Pamvotis, Greece, Using Sentinel-2 Data. ISPRS Int. J. Geo-Inf. 2020, 9, 143. [Google Scholar] [CrossRef]
- Al-Naimi, N.; Raitsos, D.E.; Ben-Hamadou, R.; Soliman, Y. Evaluation of Satellite Retrievals of Chlorophyll-a in the Arabian Gulf. Remote Sens. 2017, 9, 301. [Google Scholar] [CrossRef]
- Epps, S.; Lohrenz, S.; Tuell, G.; Barbor, K. Development of a suspended particulate matter (SPM) algorithm for the coastal zone mapping and imaging lidar (CZMIL). In Proceedings of the Algorithms and Technologies for Multispectral, Hyperspectral, and Ul-Traspectral Imagery XVI, Orlando, FL, USA, 21 May 2010. [Google Scholar]
- Zhao, X.; Zhao, J.; Zhang, H.; Zhou, F. Remote Sensing of Suspended Sediment Concentrations Based on the Waveform Decomposition of Airborne LiDAR Bathymetry. Remote Sens. 2018, 10, 247. [Google Scholar] [CrossRef]
- Zhao, X.; Zhao, J.; Zhang, H.; Zhou, F. Remote Sensing of Sub-Surface Suspended Sediment Concentration by Using the Range Bias of Green Surface Point of Airborne LiDAR Bathymetry. Remote Sens. 2018, 10, 681. [Google Scholar] [CrossRef]
- Saylam, K.; Brown, R.A.; Hupp, J.R. Assessment of depth and turbidity with airborne Lidar bathymetry and multiband satellite imagery in shallow water bodies of the Alaskan North Slope. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 191–200. [Google Scholar] [CrossRef]
- Guenther, G.C.; Cunningham, A.G.; LaRocque, P.E.; Reid, D.J. Meeting the accuracy challenge in airborne Lidar bathymetry. In Proceedings of the 20th EARSeL Symposium: Workshop on Lidar Remote Sensing of Land and Sea, Dresden, Germany, 16–17 June 2000. [Google Scholar]
- Quadros, N.D. Unlocking the characteristics of Bathymetric Lidar Sensors. LiDAR Mag. 2013, 3, 62–67. [Google Scholar]
- Baltsavias, E. Airborne laser scanning: Basic relations and formulas. ISPRS J. Photogramm. Remote Sens. 1999, 54, 199–214. [Google Scholar] [CrossRef]
- Allouis, T.; Bailly, J.-S.; Pastol, Y.; Le Roux, C. Comparison of LiDAR waveform processing methods for very shallow water bathymetry using Raman, near-infrared and green signals. Earth Surf. Process. Landforms 2010, 35, 640–650. [Google Scholar] [CrossRef]
- Wang, C.; Li, Q.; Liu, Y.; Wu, G.; Liu, P.; Ding, X. A comparison of waveform processing algorithms for single-wavelength LiDAR bathymetry. ISPRS J. Photogramm. Remote Sens. 2015, 101, 22–35. [Google Scholar] [CrossRef]
- Mountrakis, G.; Li, Y. A linearly approximated iterative Gaussian decomposition method for waveform LiDAR processing. ISPRS J. Photogramm. Remote Sens. 2017, 129, 200–211. [Google Scholar] [CrossRef]
- Yang, F.; Qi, C.; Su, D.; Ding, S.; He, Y.; Ma, Y. An airborne LiDAR bathymetric waveform decomposition method in very shallow water: A case study around Yuanzhi Island in the South China Sea. Int. J. Appl. Earth Obs. Geoinf. 2022, 109, 102788. [Google Scholar] [CrossRef]
- Abdallah, H.; Bailly, J.-S.; Baghdadi, N.N.; Saint-Geours, N.; Fabre, F. Potential of Space-Borne LiDAR Sensors for Global Bathymetry in Coastal and Inland Waters. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 6, 202–216. [Google Scholar] [CrossRef]
- Abady, L.; Bailly, J.-S.; Baghdadi, N.; Pastol, Y.; Abdallah, H. Assessment of Quadrilateral Fitting of the Water Column Contribution in Lidar Waveforms on Bathymetry Estimates. IEEE Geosci. Remote Sens. Lett. 2013, 11, 813–817. [Google Scholar] [CrossRef]
- Schwarz, R.; Pfeifer, N.; Pfennigbauer, M.; Ullrich, A. Exponential decomposition with implicit deconvolution of lidar backscatter from the water column. PFG–J. Photogramm. Remote Sens. Geoinf. Sci. 2017, 85, 159–167. [Google Scholar] [CrossRef]
- Zhao, X.; Zhao, J.; Wang, X.; Zhou, F. Improved waveform decomposition with bound constraints for green waveforms of airborne LiDAR bathymetry. J. Appl. Remote Sens. 2020, 14, 027502. [Google Scholar] [CrossRef]
- Mandlburger, G.; Pfennigbauer, M.; Pfeifer, N. Analyzing near water surface penetration in laser bathymetry—A case study at the River Pielach. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, II-5/W2, 175–180. [Google Scholar] [CrossRef]
- Zhao, J.; Zhao, X.; Zhang, H.; Zhou, F. Shallow Water Measurements Using a Single Green Laser Corrected by Building a Near Water Surface Penetration Model. Remote Sens. 2017, 9, 426. [Google Scholar] [CrossRef]
- Zhao, J.; Zhao, X.; Zhang, H.; Zhou, F. Improved Model for Depth Bias Correction in Airborne LiDAR Bathymetry Systems. Remote Sens. 2017, 9, 710. [Google Scholar] [CrossRef]
- Bouhdaoui, A.; Bailly, J.-S.; Baghdadi, N.; Abady, L. Modeling the Water Bottom Geometry Effect on Peak Time Shifting in LiDAR Bathymetric Waveforms. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1285–1289. [Google Scholar] [CrossRef]
- Billard, B.; Abbot, R.H.; Penny, M.F. Modeling depth bias in an airborne laser hydrographic system. Appl. Opt. 1986, 25, 2089–2098. [Google Scholar] [CrossRef] [PubMed]
- Wright, C.W.; Kranenburg, C.; Battista, T.A.; Parrish, C. Depth Calibration and Validation of the Experimental Advanced Airborne Research Lidar, EAARL-B. J. Coast. Res. 2016, 76, 4–17. [Google Scholar] [CrossRef]
- Fuchs, E.; Mathur, A. Utilizing circular scanning in the CZMIL system. In Proceedings of the Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XVI, Orlando, FL, USA, 21 May 2010. [Google Scholar]
- Pierce, J.W.; Fuchs, E.; Nelson, S.; Feygels, V.; Tuell, G. Development of a novel laser system for the CZMIL lidar. In Proceedings of the Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XVI, Orlando, FL, USA, 21 May 2010. [Google Scholar]
- Chiba, Z.; Abghour, N.; Moussaid, K.; El Omri, A.; Rida, M. A novel architecture combined with optimal parameters for back propagation neural networks applied to anomaly network intrusion detection. Comput. Secur. 2018, 75, 36–58. [Google Scholar] [CrossRef]
- Sibi, P.; Jones, S.A.; Siddarth, P. Analysis of different activation functions using back propagation neural networks. J. Theor. Appl. Inf. Technol. 2013, 47, 1264–1268. [Google Scholar]
- Mackay, D.J.C. Bayesian Interpolation. Neural Comput. 1992, 4, 415–447. [Google Scholar] [CrossRef]
- Liang, G.; Zhao, X.; Zhao, J.; Zhou, F. Feature Selection and Mislabeled Waveform Correction for Water–Land Discrimination Using Airborne Infrared Laser. Remote Sens. 2021, 13, 3628. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Min | Max | Mean | Std |
|---|---|---|---|---|
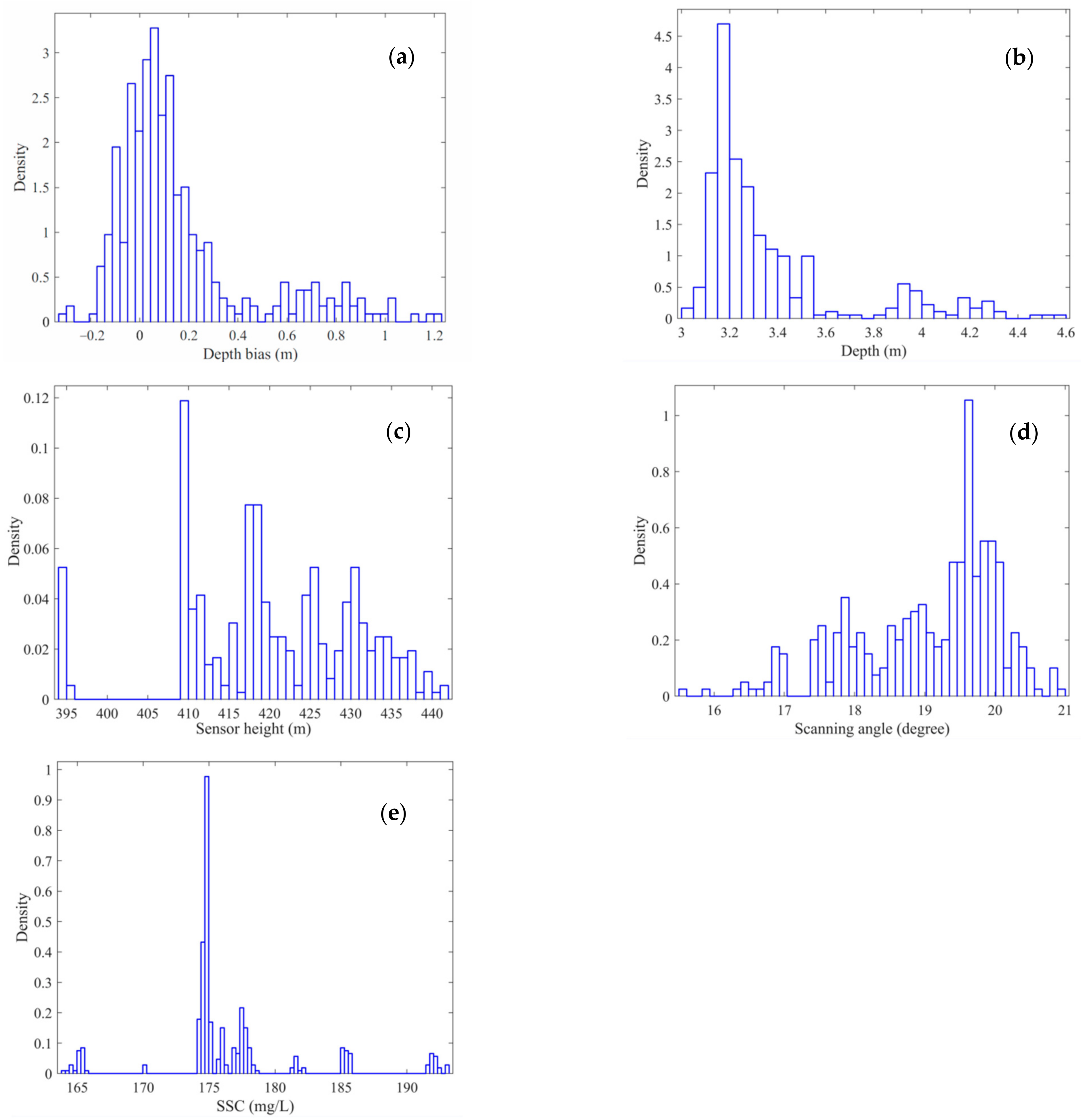
| Depth bias (m) | −0.305 | 1.221 | 0.161 | 0.28 |
| Depth (m) | 3.022 | 4.559 | 3.366 | 0.314 |
| Scanning angle (degree) | 15.553 | 20.938 | 19.052 | 1.021 |
| Sensor height (m) | 394.007 | 441.333 | 420.381 | 10.701 |
| SSC (mg/L) | 164.087 | 193.044 | 176.591 | 5.587 |
| Datasets | Samples | MSE (mg/L) | R |
|---|---|---|---|
| Training | 218 | 0.421 | 0.993 |
| Validation | 72 | 1.248 | 0.985 |
| Testing | 72 | 2.564 | 0.960 |
| Model Number | MSE (mg/L) | R |
|---|---|---|
| 1 | 2.564 | 0.960 |
| 2 | 2.026 | 0.976 |
| 3 | 2.548 | 0.954 |
| 4 | 1.750 | 0.971 |
| 5 | 2.080 | 0.969 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, X.; Gao, J.; Xia, H.; Zhou, F. Retrieval of Suspended Sediment Concentration from Bathymetric Bias of Airborne LiDAR. Sensors 2022, 22, 10005. https://doi.org/10.3390/s222410005
Zhao X, Gao J, Xia H, Zhou F. Retrieval of Suspended Sediment Concentration from Bathymetric Bias of Airborne LiDAR. Sensors. 2022; 22(24):10005. https://doi.org/10.3390/s222410005
Chicago/Turabian StyleZhao, Xinglei, Jianfei Gao, Hui Xia, and Fengnian Zhou. 2022. "Retrieval of Suspended Sediment Concentration from Bathymetric Bias of Airborne LiDAR" Sensors 22, no. 24: 10005. https://doi.org/10.3390/s222410005
APA StyleZhao, X., Gao, J., Xia, H., & Zhou, F. (2022). Retrieval of Suspended Sediment Concentration from Bathymetric Bias of Airborne LiDAR. Sensors, 22(24), 10005. https://doi.org/10.3390/s222410005