1. Introduction
A trajectory generator is a tool used to generate sensor group simulation data and corresponding navigation parameters required for the simulation of an inertial navigation system (INS) and its integrated navigation system. In the algorithm research and simulation verification of INS and its integrated navigation, the research and application of trajectory generators is indispensable. The principle is to generate the motion parameters required for the simulation test of the inertial measurement unit (IMU) by simulating the maneuvering state of the carrier [
1,
2,
3,
4]. The motion of the ship is not only affected by the maneuvering, but it also subject to interference by the sea conditions, such as wind, current and waves. In order to better study the algorithm of the ship strapdown inertial navigation system (SINS) and verify the accuracy of the algorithm by simulation, the ship trajectory generator needs to be able to generate motion parameters that conform to the ship’s motion characteristics and consider the interference of wind, current and wave.
At present, the research objects of the trajectory generator are mainly aircraft [
5,
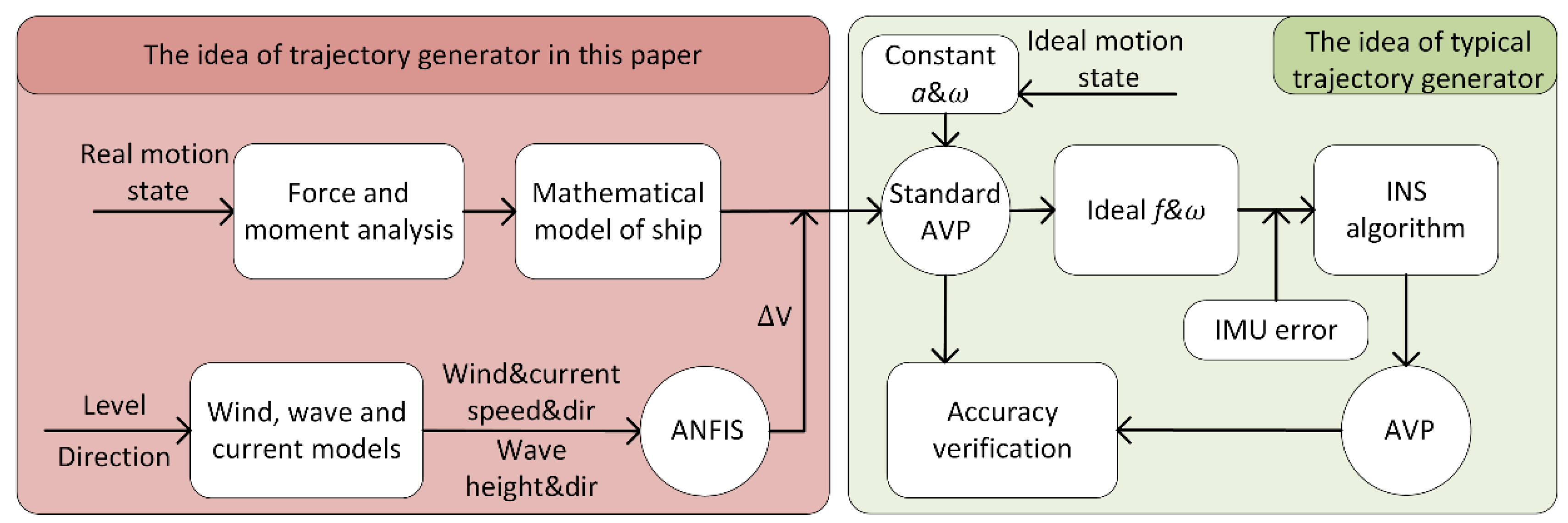
6]. The main idea of a typical trajectory generator is to calculate the acceleration and angular velocity of the carrier by presetting ideal motion states, such as uniform linear motion, uniform rotation motion, uniform acceleration motion, etc., and then calculate the attitude, velocity and position of the carrier. The main idea is shown in the green part of
Figure 1. The classical example is PROFGEN, designed by the American Air Force Avionics Laboratory [
7,
8]. This trajectory generator can generate attitude, velocity and position information by inputting the initial state, acceleration, angular velocity and other information. Due to the preset acceleration and angular velocity information, the generated trajectory is too ideal and does not conform to the motion characteristics of the ship, so it is difficult to meet the requirements of high-precision ship SINS simulation tests. The ship trajectory generator designed in reference [
9,
10] takes into account the characteristics of the ship, but it is still based on the ideal motion states, such as uniform circumference and uniform acceleration, and cannot generate complex ship trajectories. In reference [
11,
12], the ship motion parameter generator designed on the basis of ship measured data can generate a relatively complex ship motion trajectory, but it does not consider the interference of wind, current and waves. In the study of wind, current and waves, a variety of calculation formulas for wind, current and wave interference forces and moments have been proposed [
13,
14]. For example, Wu et al. [
15], Zhao Qiaosheng [
16] and Min Guk Seo [
17] have, respectively, studied the empirical formulas for wind, current and wave forces and moments. However, the described formulas involve complicated hydrodynamic parameters and detailed ship type data, which are usually difficult to obtain and cannot be directly applied to the ship trajectory generator.
Aiming at the above problems, this paper designs a new ship trajectory generator under wind, current and wave interference. Compared with the typical trajectory generator, the main changes are as shown in the red area in
Figure 1. The main ideas are as follows: (1) based on the motion state, the ship motion characteristics are analyzed, and the ship trajectory generator without wind, current and wave interference is established; (2) the time-varying wind, current and wave field is established to analyze the interference of wind, current and waves in the ship motion parameters; (3) an adaptive neuro fuzzy inference system (ANFIS) is designed; with the wind and wave information of the measured data as the input and the speed change as the output, the ANFIS rules are determined through neural network training; (4) the ship trajectory generator after superposing wind, current and wave interference is compared with the measured data to verify the rationality and superiority of ANFIS.
2. Mathematical Model of Ship Motion
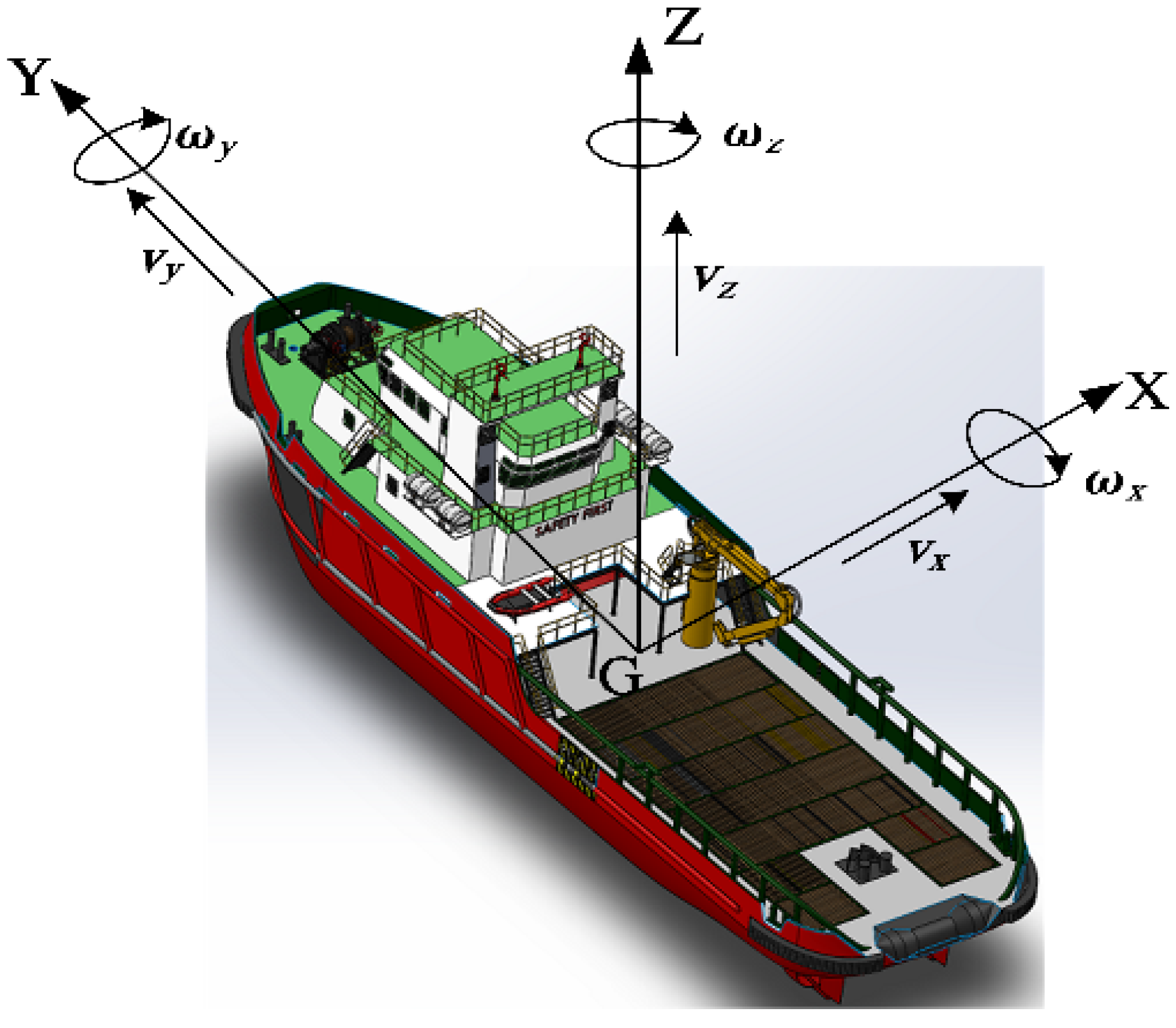
The ship motion states can be divided into uniform linear motion, variable speed motion and steering motion. In order to simulate the ship characteristics, it is necessary to focus on the acceleration and angular velocity change analysis of variable speed motion and steering motion. The description of the ship motion variables in the carrier coordinate system is shown in
Figure 2.
(1) Uniform linear motion
Without wind, current and wave interference, the acceleration and angular velocity of the ship are approximately zero when the ship sails at a constant speed.
(2) Variable speed linear motion
When there is no interference of wind, current and waves, the attitude of the straight sailing ship with variable speed will not alter, so the angular velocity can be regarded as zero. It can be expressed as
. The variable speed motion of the ship is mainly achieved by the maneuvering propeller, and the differential equation of its motion can be expressed as [
18]
where
FP is the propulsion force and
Ru is the drag coefficient along the
Y-axis.
FP can be expressed as [
19]
Inserting
FP from Equation (2) into Equation (1), Equation (1) can be expressed as
where
tp is the thrust reduction coefficient,
n is the rotational speed of the propeller and
Dp is the propeller diameter. When the ship data are fixed, Equation (3) can be simplified as follows:
According to the actual situation, when the ship is in a stable state at different gears, the rotational speed of the propeller is approximately a constant value. When n is a constant value, the speed variations of the ship reflect a first-order system. Considering the change in the rotational speed of the propeller when the ship is accelerating, combined with the measured data, this paper adopts the second-order overdamping function as the longitudinal speed model of the ship when the ship is accelerating. This is because the first-order system can be regarded as a special case of the second-order system, and the second-order system can also reflect the characteristics of the higher-order system.
Assume that the speed of the ship at the initial moment is
v0, and the speed increases by Δ
v after the propeller gear is switched; thus, the speed change can be expressed as
In (5),
,
;
and
are the damping ratio and oscillating frequency, respectively. By identifying the measured data, different
and
can be obtained, which can reflect the acceleration performance of ships in different gears [
20]. Deceleration is regarded as the reverse process of acceleration and will not be analyzed in detail.
(3) Steering motion
The amplitude of pitch and heave caused by the steering motion of a ship in still water is very small, and the pitch angular velocity ωx and heave acceleration az are approximately zero.
According to the transfer function of the rudder angle
δ and heading angular velocity
ωz in the Nomoto response model [
21],
Since
T3 is very small and the zero point
is far away from the negative half axis, the removal of this point has little impact, so the heading angular velocity can be expressed as
In (7), the definition of T3 and T4 refers to Equation (5).
The steering movement can be divided into three stages: initial steering, constant steering and steering recovery. Assuming that the roll angle in the first stage will increase to the angle
γ, the change in roll angle can be expressed as
In (8), and are the damping ratio and oscillating frequency, respectively; β1 is the initial phase. In the phase of steady steering, the roll angle remains unchanged, so the angular velocity ωy is zero. In the phase of steering recovery, the change in roll angle can be regarded as the reverse process of the initial phase.
The displacement and attitude angle are denoted as
, and the velocity and angular velocity are denoted as
. The trajectory parameters of the ship can be obtained from the following formula:
In (9), , .
In order to verify the feasibility and superiority of the above model, the simulation verification is carried out based on the ship’s measured data in a period of relatively calm sea conditions. The ship’s initial information and motion state are shown in
Table 1 and
Table 2.
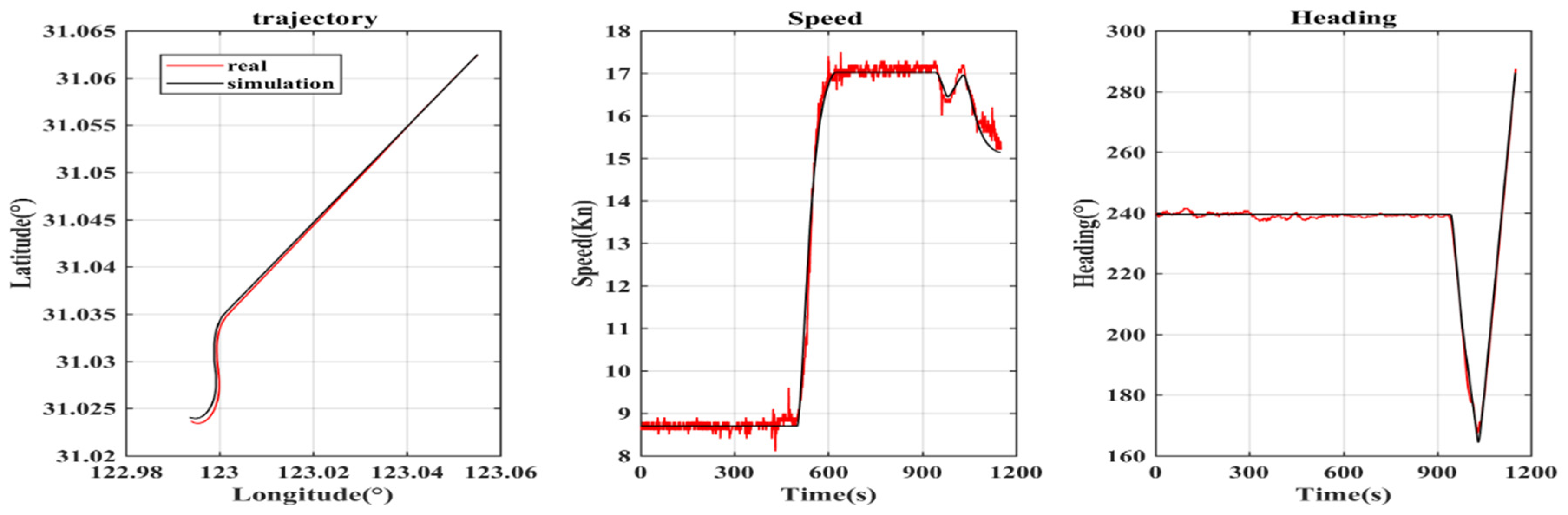
Based on the position, speed and heading of the measured data, the comparison results of typical trajectory generators and the trajectory generator described in this paper are shown in
Figure 3 and
Figure 4. The black line in the figure denotes the data generated by the trajectory generator, and the red line denotes the measured data.
In order to judge the accuracy of the simulation results more intuitively and verify the superiority of this model, the accuracy of position, speed and heading and root-mean-square error (RMSE) are calculated. The results are shown in
Table 3.
Accuracy refers to the accuracy within the acceptable error range (threshold), and RMSE reflects the statistical rule of error. It can be seen from
Table 3 that the accuracy of the position, speed and heading generated by the trajectory generator described in this paper within the threshold is higher than that of the typical trajectory generator, and the RMSE value is also smaller. This is because the preset ideal track of the typical trajectory generator does not conform to the motion characteristics of the ship, which also shows that the ship trajectory generator described in this paper is superior to the typical trajectory generator.
Although the simulation effect of the model proposed in this paper is better than that of the typical trajectory generator, because the model is not disturbed by wind, current and waves, it is still quite different from real ship motion. In order to obtain more realistic ship motion parameters, it is necessary to analyze the wind, current and wave interference.
4. Simulation Analysis and Comparative Verification
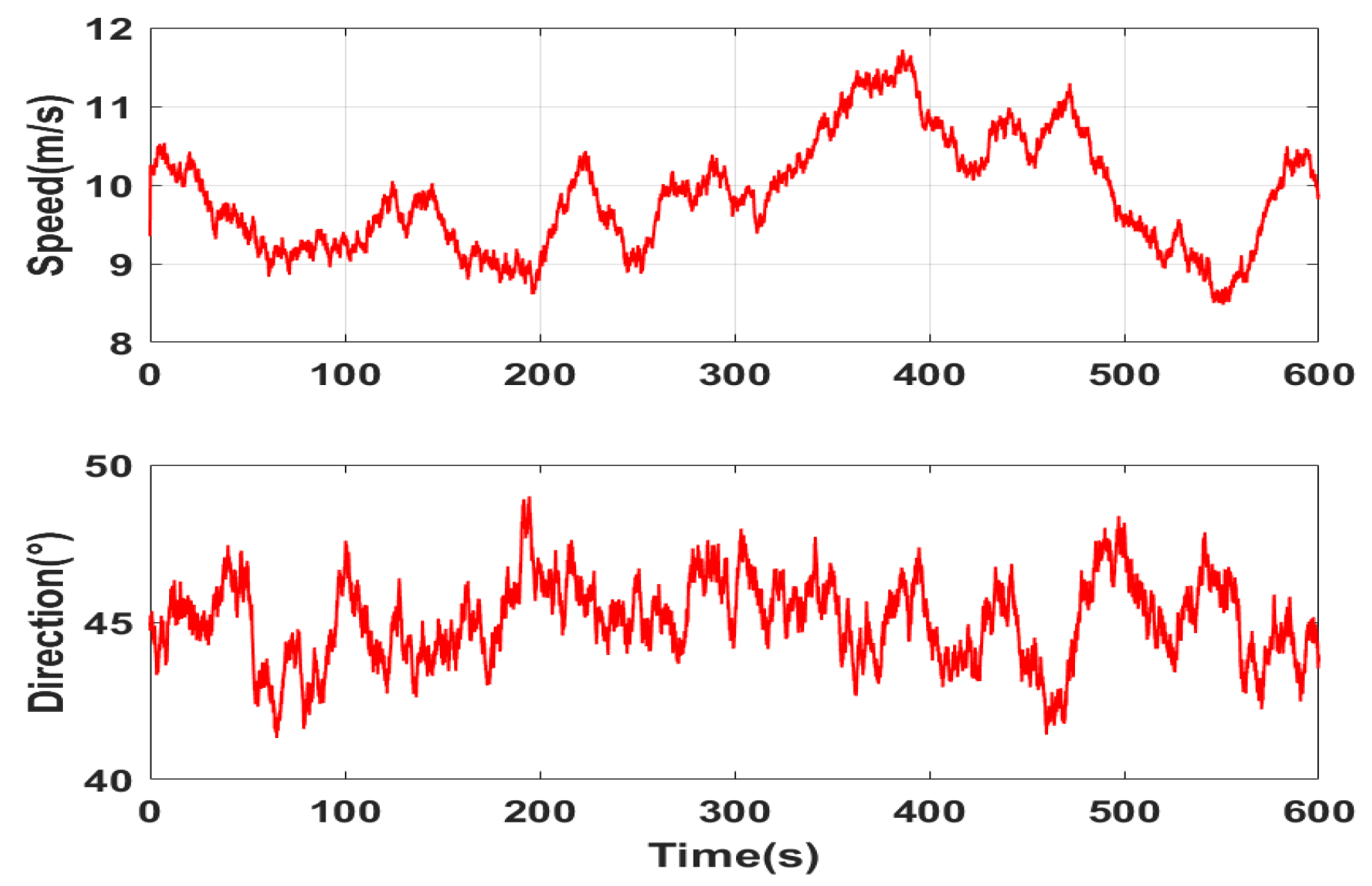
Due to the time-varying nature and randomness of wind, current and waves, the time-varying non-uniform wind, current and wave field constructed in this paper cannot be consistent with the wind, current and waves encountered by the ship in actual navigation, and its impact on the ship’s motion state cannot be consistent with the measured data. In order to verify the rationality and superiority of this method, the following simulation strategies are formulated:
(1) Based on the ship trajectory generator designed in this paper, the ship motion parameters without wind, current and wave interference are generated, and then the wind, current and wave interferences are superimposed to compare and analyze whether the change in motion parameters is reasonable;
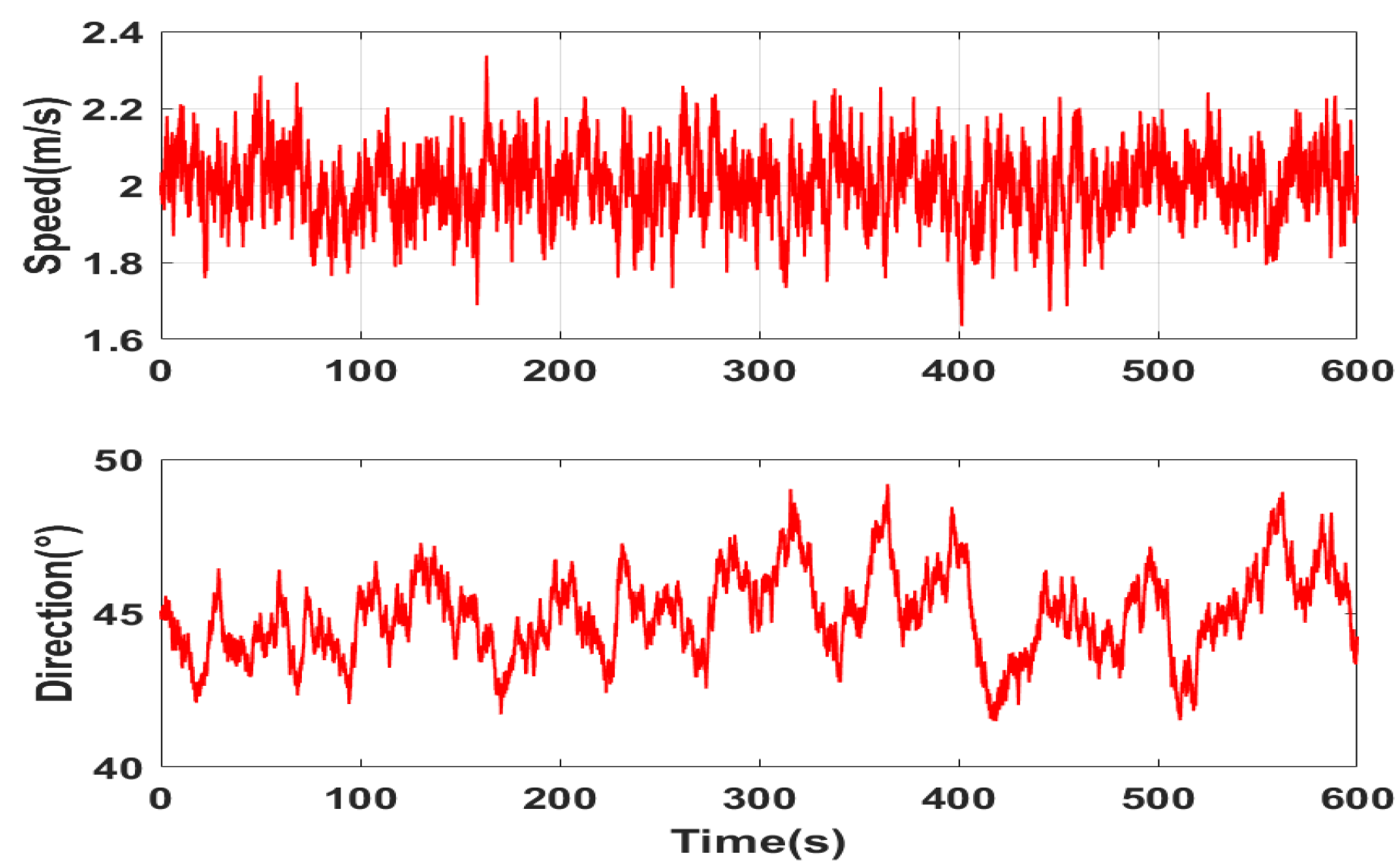
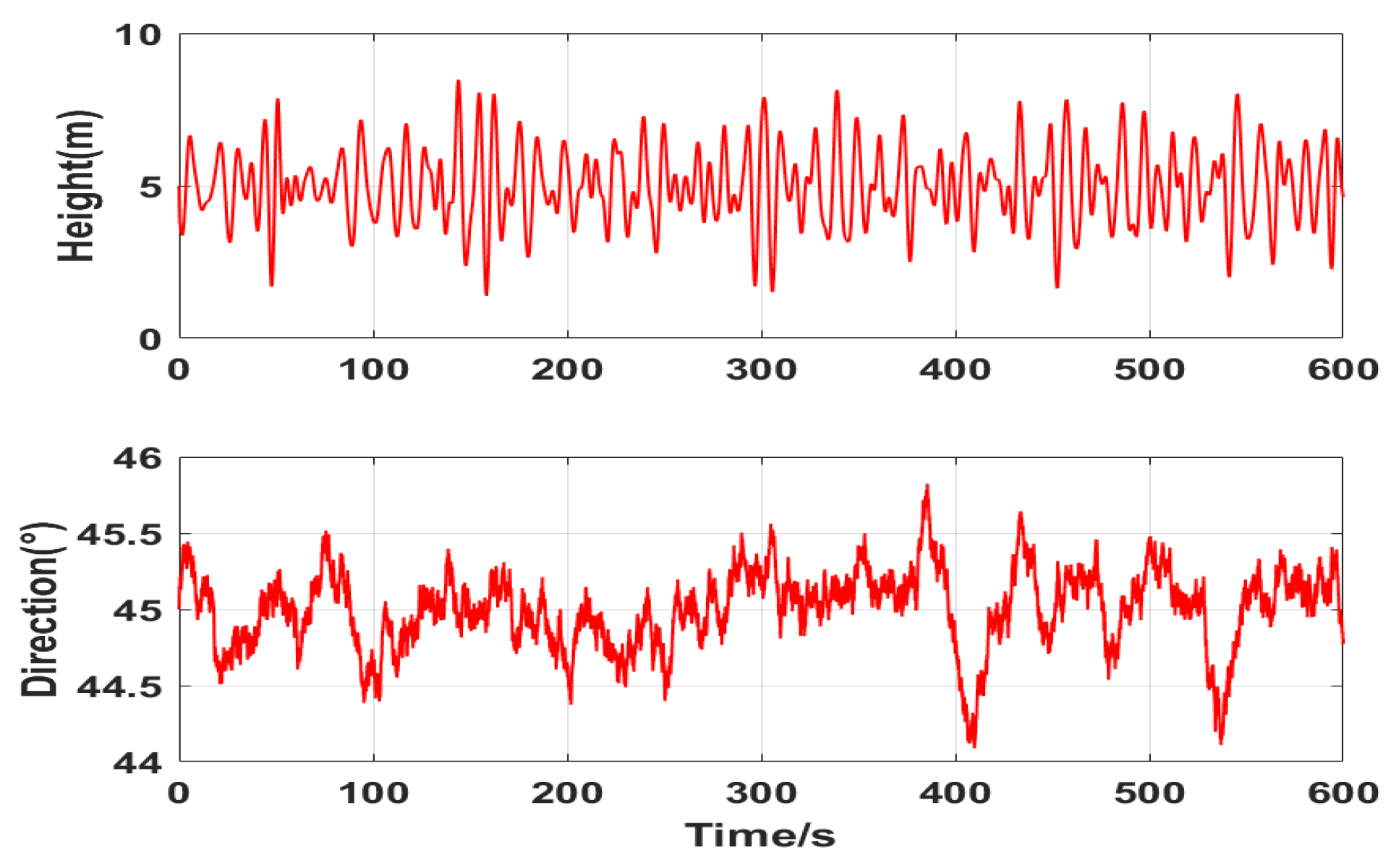
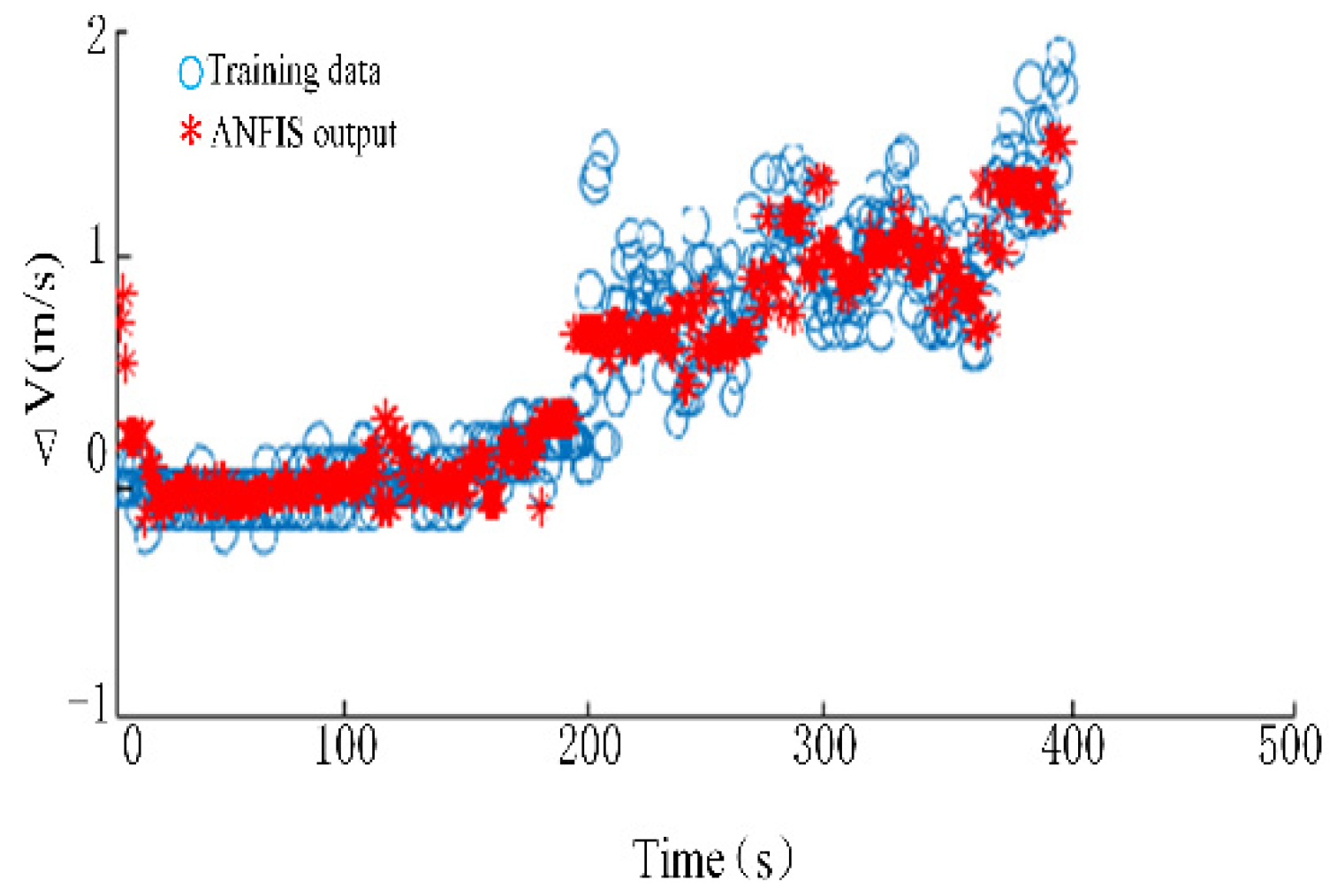
(2) We select a period with a relatively large disturbance of wind and waves from the measured data; take the actual measured wind speed, wind direction, wave height and wave direction as the input of ANFIS; generate the corresponding speed change; and then add it to the ship trajectory generator in this paper to observe whether the accuracy of the main motion parameters has been improved.
4.1. Simulation Analysis
The trajectory generator described in this paper generates ship motion parameters, sets the level of wind, current and waves and generates corresponding interferences in combination with the wind, current and wave fields. The initial information, maneuvering state and detailed information of wind, current and waves are shown in
Table 4,
Table 5 and
Table 6.
The simulation results are shown in
Figure 10. The black lines and red lines in the figure represent the simulation results without interference and with interference, respectively.
It can be seen from
Figure 10 that after the interference is added, the movement of the ship changes as follows:
(1) The track obviously deviates to the east and north;
(2) The speed generally increases, slightly increases before steering, and then increases as a whole;
(3) The overall trend of the heading angle changes little—it decreases slightly after the first steering and increases slightly after the second steering.
(1) The wind direction is 45° north by east, and the flow direction is 90° north by east. Therefore, under the combined action of wind and current, the ship’s track will naturally drift to the east and north.
(2) In the wind, current and wave interference considered in this paper, the current has the greatest impact on the ship’s speed.
Table 6 shows that when the ship does not start to steer, the current direction is almost perpendicular to the ship’s moving direction, so it has little impact on the speed. However, the speed caused by wind has an influence on the ship’s speed, so the ship’s speed rises slightly before steering. After the first steering, the current begins to exert an influence on the direction of the ship’s motion, which causes the ship’s speed to rise.
(3) As the wave level is small, it has little influence on the heading angle. It can be seen from the wind direction that the wind will cause the ship’s heading angle to change to the north by east direction. The ship will move southward after the first steering, so the wind will reduce the ship’s heading angle. After the second steering, the ship will move northward, so its heading angle will increase.
Therefore, the above changes are reasonable after the interference, which shows the rationality and feasibility of the wind, current and wave interference model proposed in this paper.
4.2. Simulation Comparison Verification
In order to verify the accuracy of ANFIS, based on the ship trajectory generator presented in this paper, the ship motion parameters are generated using the same initial state and maneuvering state. We compare the accuracy of the ship motion parameters with and without wind, current and wave interference. The initial information and the maneuvering status of the ship are shown in
Table 7 and
Table 8.
The comparison results of the simulated speed and track are shown in
Figure 11. The red line in the figure is the measured data; the blue line is the data generated by the ship trajectory generator with wind, current and wave interference; and the black line is the data generated by the ship trajectory generator without wind, current and wave interference.
It can be seen from the above figures that, compared with the ship trajectory generator without wind, current and wave interference, the accuracy of the speed and track after adding ANFIS is significantly improved, especially in the constant speed stage, where the change in speed is more consistent with the measured data; the specific accuracy and RMSE values are shown in
Table 9. Since the accuracy of the position is obviously improved, if the same threshold value as in
Table 3 is adopted, the position accuracy will be 100%, so the threshold value of the position listed in
Table 9 is adjusted to 35 m.
The above simulation results show that the method proposed in this paper can better simulate the impact of the interference of wind, current and waves on ship motion, and they also verify the advantages of ANFIS.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}