
Effect of Autonomous Vehicles on Fatigue Life of Orthotropic Steel Decks


Abstract
:1. Introduction
2. Finite Element Analysis
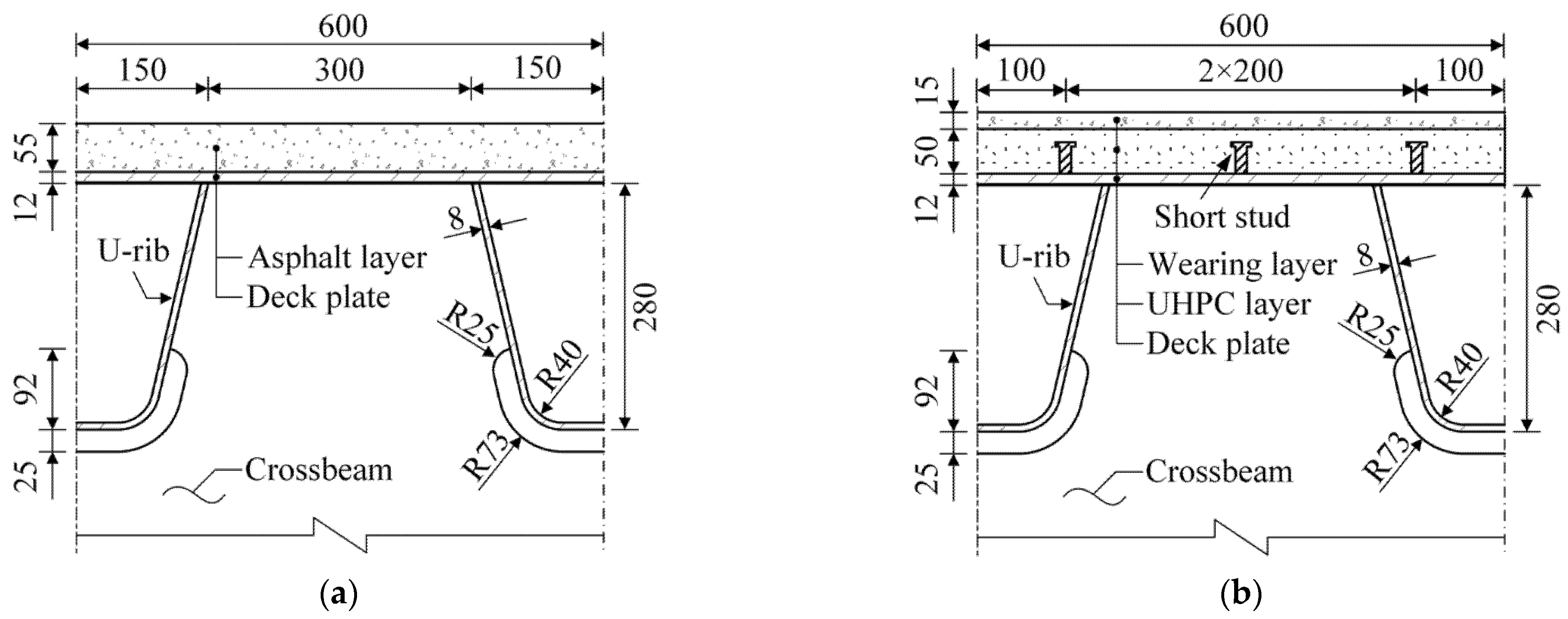
2.1. OSD Systems
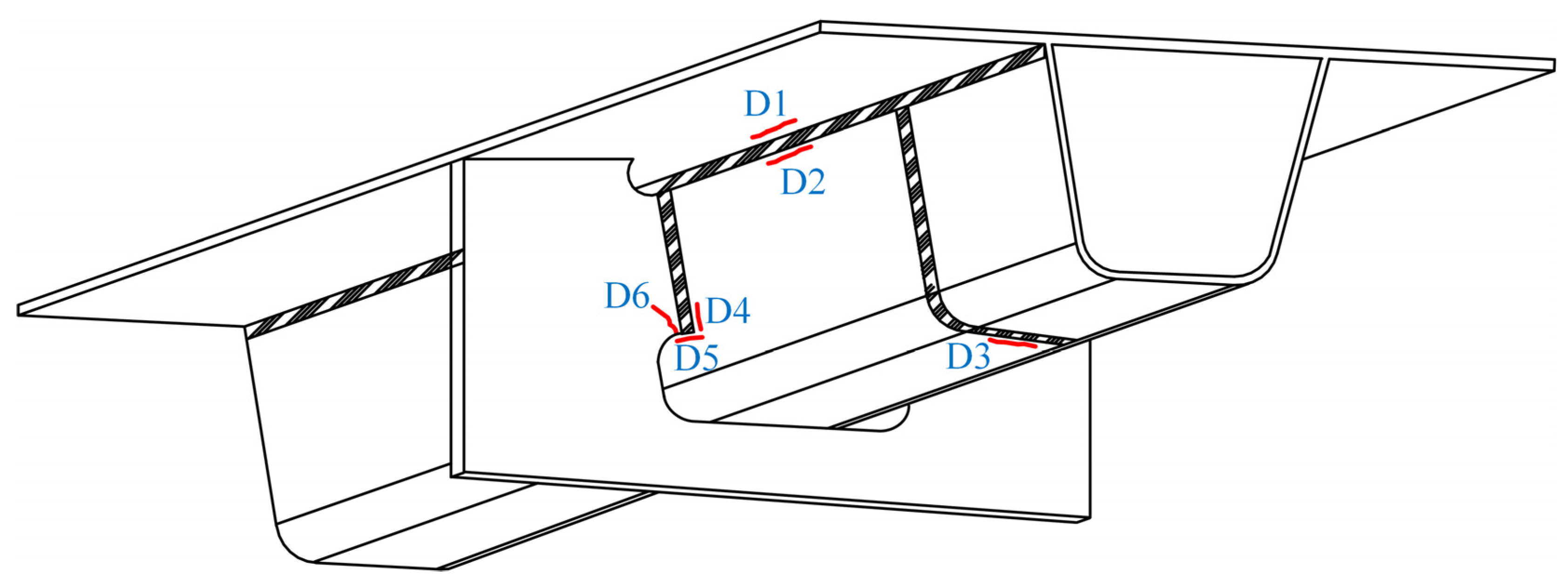
2.2. Fatigue Details
2.3. Finite Element Models
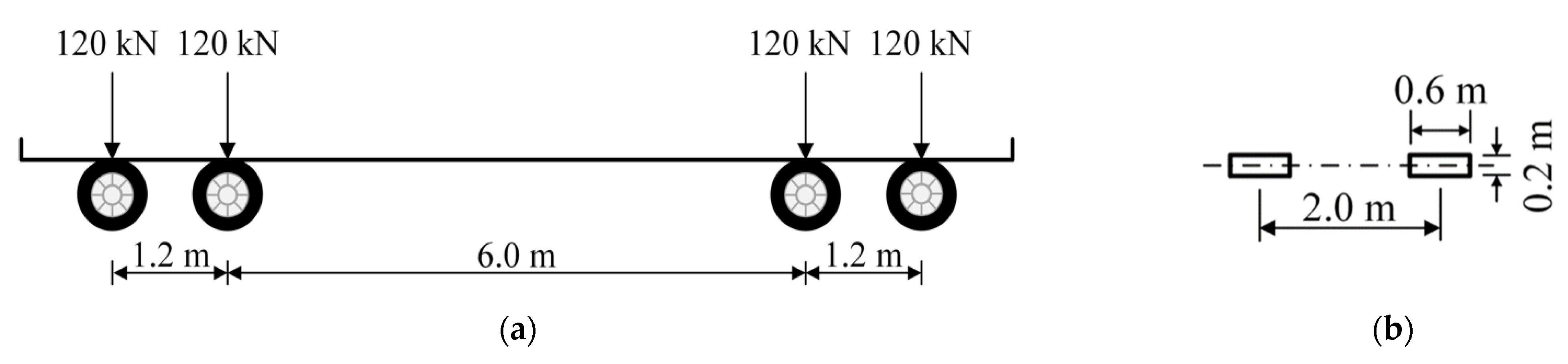
2.4. Fatigue Load
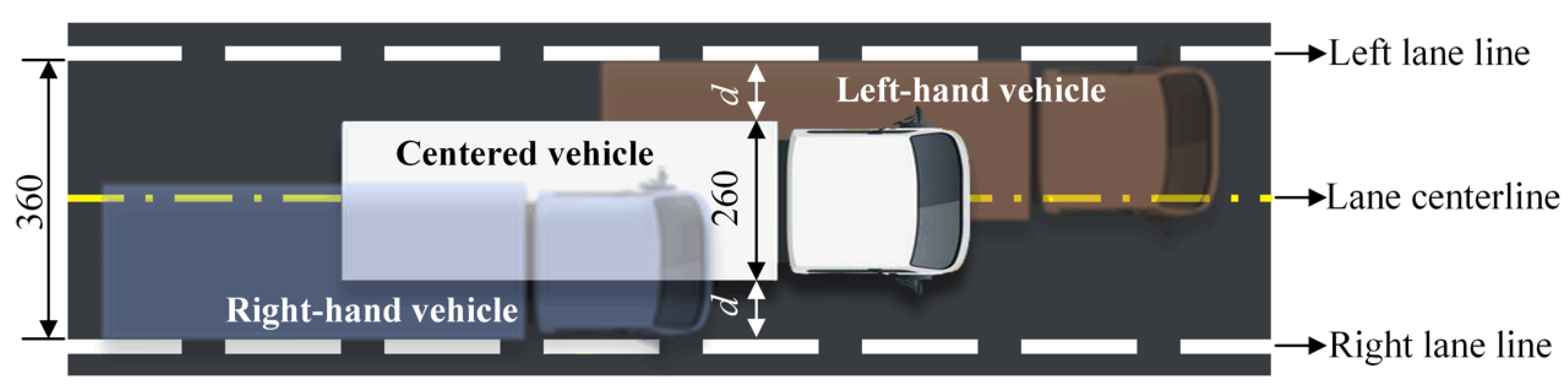
3. Transverse Distribution of Vehicles
3.1. Human-Driven Vehicles
3.2. Autonomous Vehicles
3.3. Mixed Traffic Flow
4. Fatigue Evaluation of OSDs Considering Autonomous Vehicles
4.1. Stress Calculation of Fatigue Details
4.2. Equivalent Fatigue Damage
4.3. Fatigue Damage of Fatigue Details Considering Autonomous Vehicles
5. Optimizing the Transverse Distribution of Autonomous Vehicles
6. Conclusions
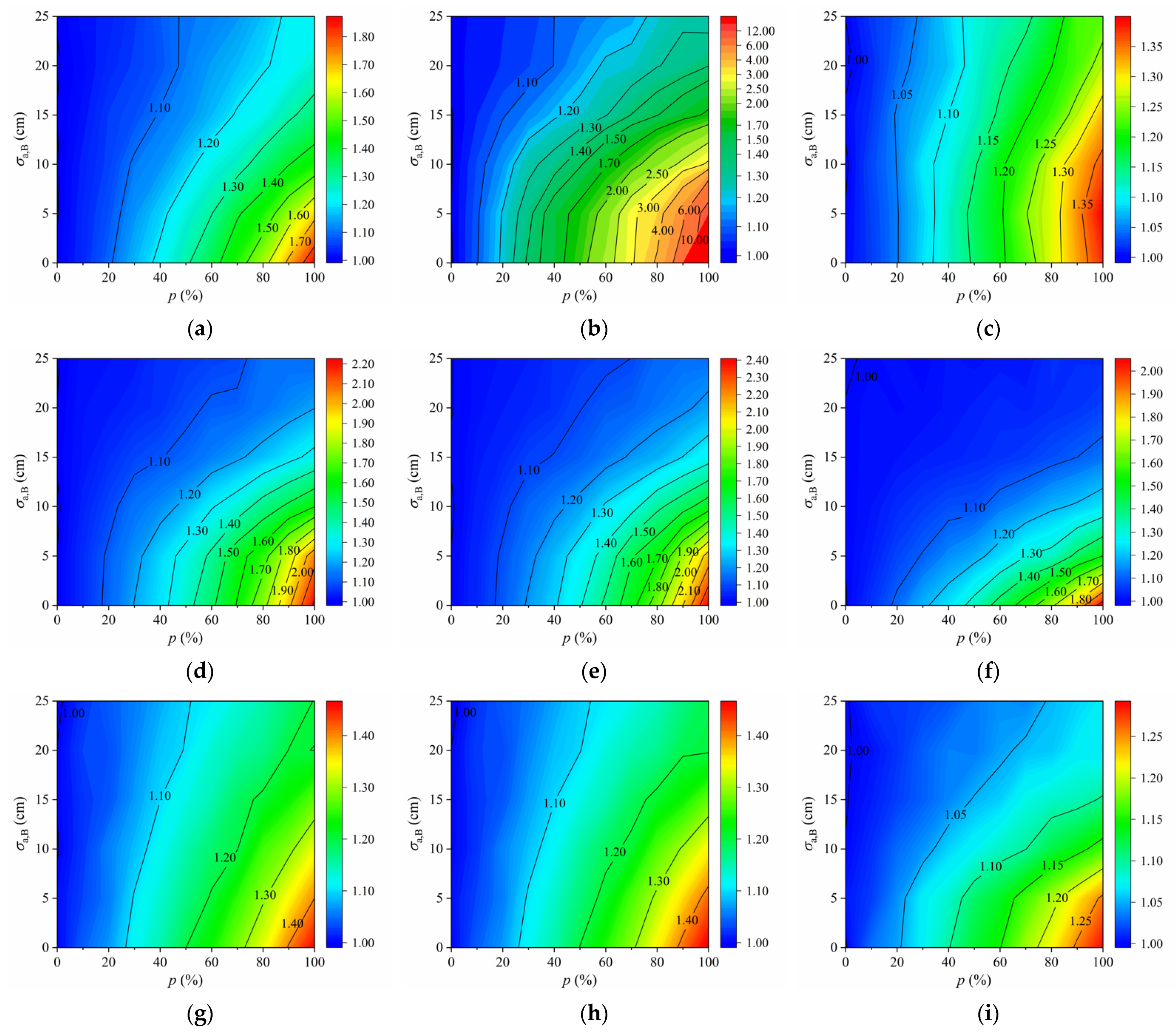
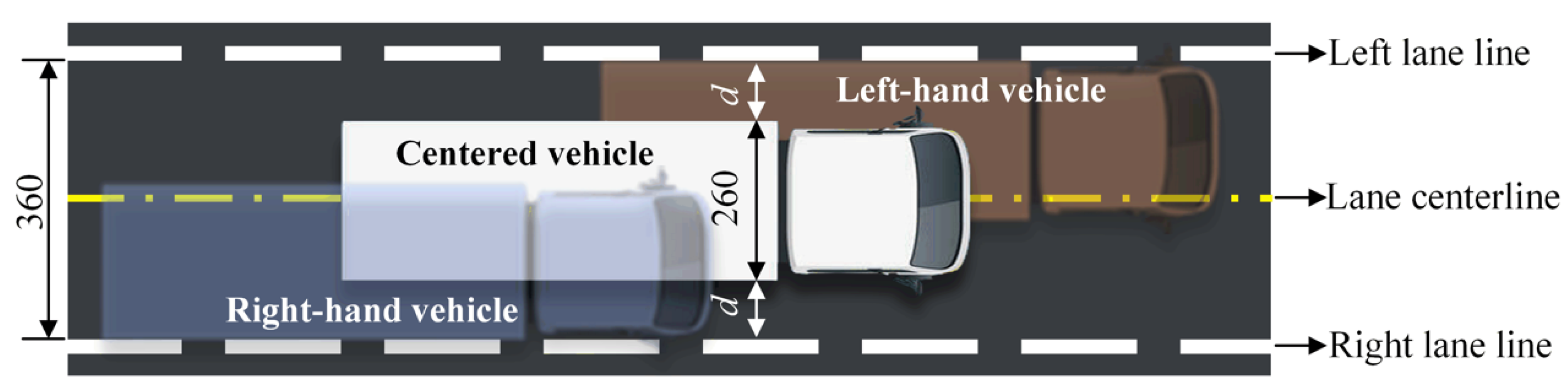
- The transverse distribution of vehicles in lanes can be significantly affected by autonomous vehicles. Autonomous vehicles would be overly concentrated on the lane centerline and be more likely to pass the bridge from a more unfavorable transverse position if their transverse distribution is unconstrained, which may accelerate the fatigue damage of fatigue details and shorten the fatigue life of OSDs, especially when the proportion of autonomous vehicles in the mixed traffic flow exceeds 30%. Specifically, the fatigue damage of most fatigue details in OSDs may increase by 51% to 210% in the most unfavorable case in which all autonomous vehicles concentrate on the most unfavorable transverse position.
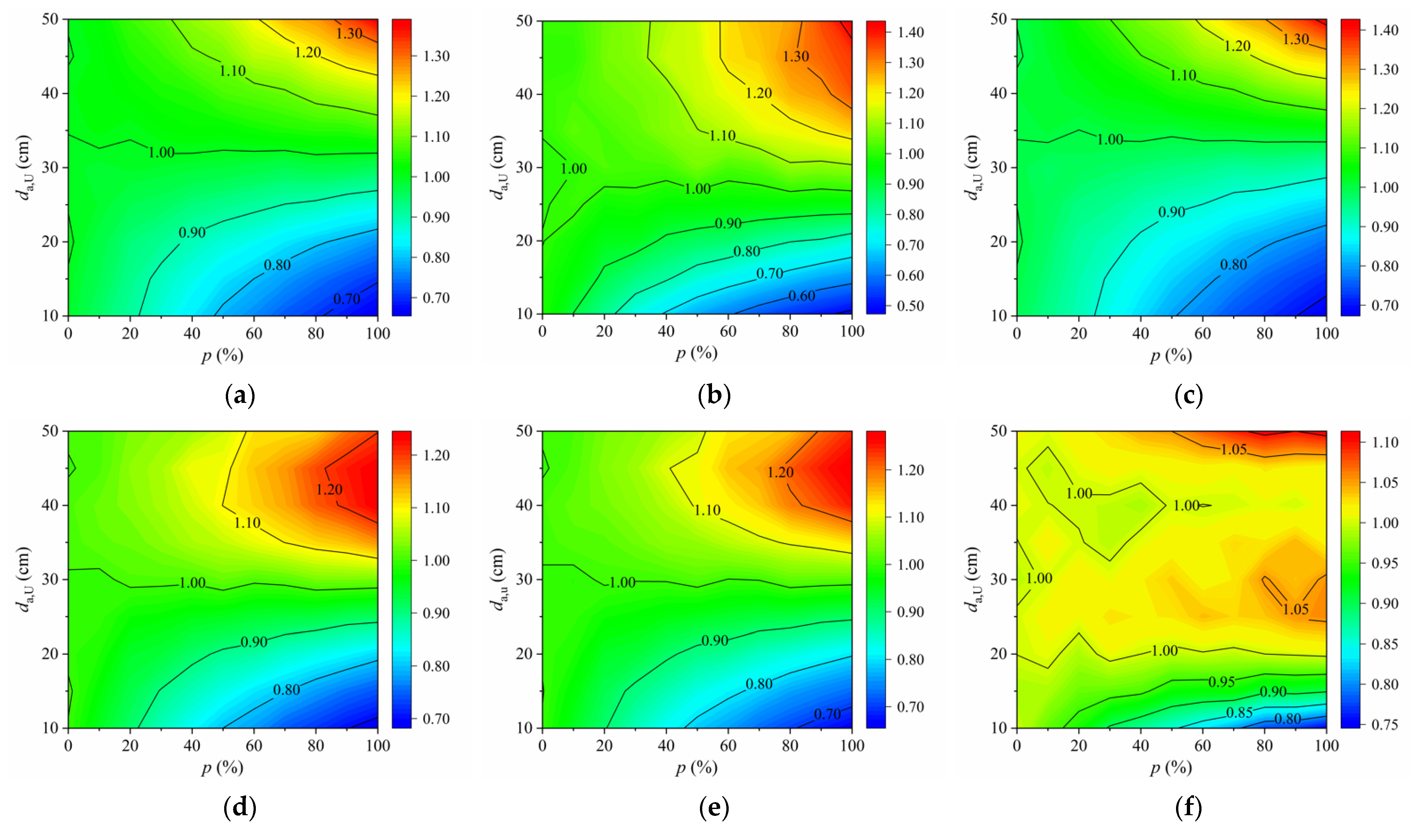
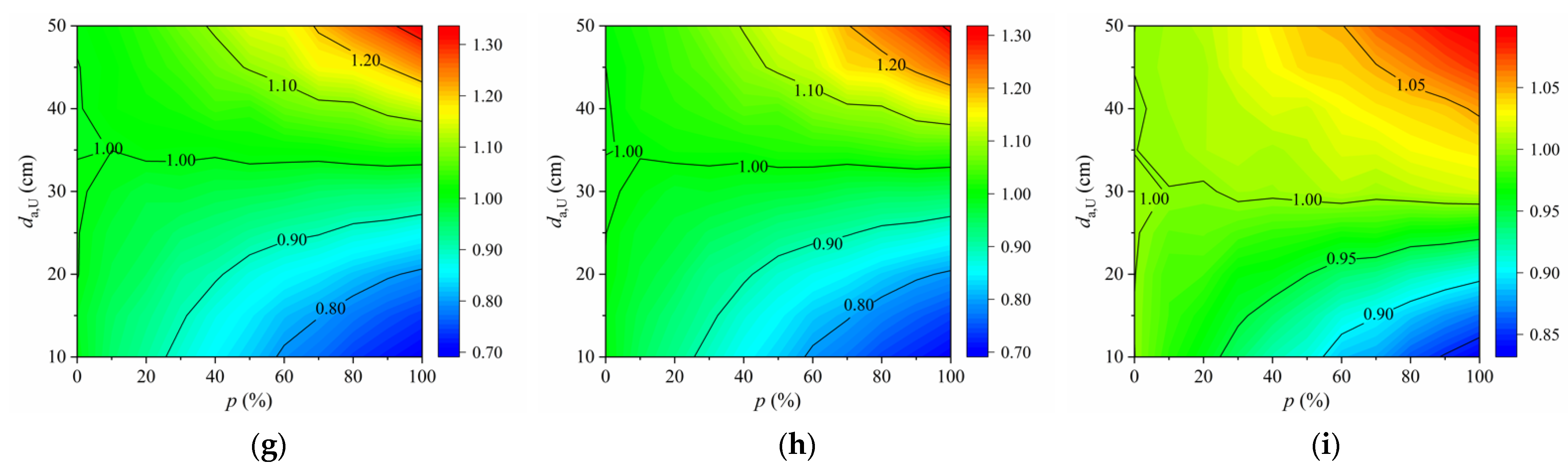
- It is feasible to prevent the negative effect of autonomous vehicles on the fatigue damage of fatigue details and even extend the fatigue life of OSDs by optimizing the transverse distribution of autonomous vehicles. Compared to the uniform distribution, the bimodal Gaussian distribution is a more efficient transverse distribution pattern for autonomous vehicles, under which the fatigue life of OSDs can be extended significantly once the proportion of autonomous vehicles exceeds 30% and the fatigue life of most fatigue details in the COSD could be extended by more than 86% in the most favorable case.
- The fatigue life of both the COSD and the LWCD can be significantly affected by autonomous vehicles. However, the fatigue performance of the LWCD is better than that of the COSD. Moreover, both the negative and positive effects of autonomous vehicles on the fatigue life of the COSD are more significant than those of the LWCD in most cases.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Notation:
| COSD | conventional OSD |
| D | cumulative fatigue damage of fatigue details |
| DOF | degrees of freedom |
| De | equivalent fatigue damage of each fatigue detail |
| da,U | the maximum offset of autonomous vehicle from lane centerline |
| FEM | finite element model |
| FLM | fatigue load model |
| Fa(x) | modified PDF of the transverse distribution of autonomous vehicles |
| Fa,B(x) | modified PDF of the transverse distribution of autonomous vehicles when following a bimodal Gaussian distribution |
| Fa,U(x) | PDF of the transverse distribution of autonomous vehicles when following a uniform distribution |
| Fh(x) | modified PDF of the transverse distribution of human-driven vehicles |
| Fm(x) | modified PDF of the transverse distribution of mixed traffic flow |
| fa(x) | original PDF of the transverse distribution of autonomous vehicles |
| fa,B(x) | original PDF of the transverse distribution of autonomous vehicles when following a bimodal Gaussian distribution |
| fh(x) | original PDF of the transverse distribution of human-driven vehicles |
| KC | fatigue strength constant corresponding to high-stress range |
| KD | fatigue strength constant corresponding to low-stress range |
| LWCD | lightweight composite OSD |
| Ne | equivalent number of average daily truck traffic within a single lane |
| Ni | number of stress cycles corresponding to the stress range of ΔSi at which fatigue failure occurs |
| Nj | number of stress cycles corresponding to the stress range of ΔSj at which fatigue failure occurs |
| ni | number of actual stress cycles experienced by fatigue detail corresponding to stress range of ΔSi |
| nj | number of actual stress cycles experienced by fatigue detail corresponding to stress range of ΔSj |
| OSD | orthotropic steel deck |
| probability density function | |
| p | proportion of autonomous vehicles in mixed traffic flow |
| RC | rib-to-crossbeam |
| RD | rib-to-deck |
| Shot | hot spot stress |
| S0.5t | stress at reference node that is 0.5 × t away from the node of interest |
| S1.5t | stress at reference node that is 1.5 × t away from the node of interest |
| S4mm | stress at reference node that is 4 mm away from the node of interest |
| S8mm | stress at reference node that is 8 mm away from the node of interest |
| S12mm | stress at reference node that is 12 mm away from the node of interest |
| t | thickness of plate on which the weld toe is located |
| UHPC | ultrahigh performance concrete |
| x | transverse offset of the vehicle from lane centerline |
| Y | fatigue life of fatigue details |
| Yh | fatigue life of fatigue details under the action of human-driven vehicles |
| Ym | fatigue life of fatigue details under the action of mixed traffic flow |
| ΔσC | detail category of fatigue details |
| ΔσD | constant amplitude fatigue limit of fatigue details |
| ΔσL | cut-off limit of fatigue details |
| ΔSi | the i-th high-stress range |
| ΔSj | the j-th low-stress range |
| μ1 | mean of the first peak of fa,B(x) |
| μ2 | mean of the second peak of fa,B(x) |
| μa | mean of fa(x) |
| μa,B | absolute value of μ1 and μ2 when the bimodal Gaussian distribution is symmetric with lane centerline |
| μh | mean of fh(x) |
| σa | standard deviation of fa(x) |
| σh | standard deviation of fh(x) |
References
- Troitsky, M.S. Orthotropic Bridges-Theory and Design, 2nd ed.; James, F., Ed.; Lincoln Arc Welding Foundation: Cleveland, OH, USA, 1987. [Google Scholar]
- Connor, R.J. Manual for Design, Construction, and Maintenance of Orthotropic Steel Deck Bridges; Report No. FHWA-IF-12-027; Federal Highway Administration: Philadelphia, PA, USA, 2012. [Google Scholar]
- Connor, R.J.; Fisher, J.W. In-Service Response of an Orthotropic Steel Deck Compared with Design Assumptions. Transp. Res. Rec. J. Transp. Res. Board 2000, 1696, 100–108. [Google Scholar] [CrossRef]
- Kolstein, M.H. Fatigue Classification of Welded Joints in Orthotropic Steel Bridge Decks. Ph.D Thesis, Delft University of Technology, Delft, The Netherlands, 2007. [Google Scholar]
- Fisher, J.W.; Barsom, J.M. Evaluation of Cracking in the Rib-to-Deck Welds of the Bronx–Whitestone Bridge. J. Bridg. Eng. 2016, 21, 04015065. [Google Scholar] [CrossRef]
- Zhang, Q.H.; Bu, Y.Z.; Li, Q. Review on fatigue problems of orthotropic steel bridge deck. China J. Highw. Transp. 2017, 30, 14–30. [Google Scholar]
- Shao, X.; Yi, D.; Huang, Z.; Zhao, H.; Chen, B.; Liu, M. Basic Performance of the Composite Deck System Composed of Orthotropic Steel Deck and Ultrathin RPC Layer. J. Bridg. Eng. 2013, 18, 417–428. [Google Scholar] [CrossRef]
- Graybeal, B.; Brühwiler, E.; Kim, B.-S.; Toutlemonde, F.; Voo, Y.L.; Zaghi, A. International Perspective on UHPC in Bridge Engineering. J. Bridg. Eng. 2020, 25, 04020094. [Google Scholar] [CrossRef]
- Xiao, Z.-G.; Yamada, K.; Ya, S.; Zhao, X.-L. Stress analyses and fatigue evaluation of rib-to-deck joints in steel orthotropic decks. Int. J. Fatigue 2008, 30, 1387–1397. [Google Scholar] [CrossRef]
- Zhou, X.Y.; Treacy, M.; Schmidt, F.; Brühwiler, E.; Toutlemonde, F.; Jacob, B. Effect on bridge load effects of vehicle trans-verse in-lane position: A case study. J. Bridge Eng. 2015, 20, 04015020. [Google Scholar] [CrossRef]
- Zhu, Z.; Xiang, Z.; Zhou, Y.E. Fatigue behavior of orthotropic steel bridge stiffened with ultra-high performance concrete layer. J. Constr. Steel Res. 2019, 157, 132–142. [Google Scholar] [CrossRef]
- Ding, N.; Shao, X.D. Study on fatigue performance of light-weighted composite bridge deck. China Civ. Eng. J. 2015, 48, 74–81. [Google Scholar]
- Xiang, Z.; Zhu, Z.W. Simulation study on fatigue behavior of wrap-around weld at rib-to-floorbeam joint in a steel-UHPC composite orthotropic bridge deck. Constr. Build. Mater. 2021, 289, 123161. [Google Scholar] [CrossRef]
- Gunay, B. Modelling lane discipline on multilane uninterrupted traffic flow. Traffic Eng. Control 1999, 40, 440–447. [Google Scholar]
- Lee, J.W. Model Based Predictive Control for Automated Lane Centering/Changing Control Systems. U.S. US8190330B2, 29 May 2012. [Google Scholar]
- Chen, F.; Song, M.; Ma, X.; Zhu, X. Assess the impacts of different autonomous trucks’ lateral control modes on asphalt pavement performance. Transp. Res. Part C Emerg. Technol. 2019, 103, 17–29. [Google Scholar] [CrossRef]
- Noorvand, H.; Karnati, G.; Underwood, B.S. Autonomous vehicles: Assessment of the implications of truck positioning on flexible pavement performance and design. Transp. Res. Rec. 2017, 2640, 21–28. [Google Scholar] [CrossRef]
- Watzenig, D.; Martin, H. Automated Driving: Safer and More Efficient Future Driving; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Li, S.; Deng, K.; Zheng, Y.; Peng, H. Effect of Pulse-and-Glide Strategy on Traffic Flow for a Platoon of Mixed Automated and Manually Driven Vehicles. Comput. Civ. Infrastruct. Eng. 2015, 30, 892–905. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Chen, F.; Song, M.; Ma, X. A lateral control scheme of autonomous vehicles considering pavement sustainability. J. Clean. Prod. 2020, 256, 120669. [Google Scholar] [CrossRef]
- Boyle, D.P.; Chamitoff, G.E. Autonomous Maneuver Tracking for Self-Piloted Vehicles. J. Guid. Control. Dyn. 1999, 22, 58–67. [Google Scholar] [CrossRef]
- Shao, X.; Cao, J. Fatigue Assessment of Steel-UHPC Lightweight Composite Deck Based on Multiscale FE Analysis: Case Study. J. Bridg. Eng. 2018, 23, 05017015. [Google Scholar] [CrossRef]
- Cao, J.H.; Shao, X.D.; Deng, L.; Gan, Y.D. Static and fatigue behavior of short-headed studs embedded in a thin ultra-high-performance concrete layer. J. Bridge Eng. 2017, 22, 04017005. [Google Scholar] [CrossRef]
- Zou, S.; Cao, R.; Deng, L.; Wang, W. Effect of stress reversals on fatigue life evaluation of OSD considering the transverse distribution of vehicle loads. Eng. Struct. 2022, 265, 114400. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Z.; Li, A. Combined use of SHMS and finite element strain data for assessing the fatigue reliability index of girder components in long-span cable-stayed bridge. Theor. Appl. Fract. Mech. 2010, 54, 127–136. [Google Scholar] [CrossRef]
- Li, L.F.; Zeng, Y.; Pei, B.D.; Wang, L.H. Stress characteristic analysis and field test on the cutouts of light-weight composite deck. China J. Highw. Transp. 2019, 32, 66–78. [Google Scholar]
- Poutiainen, I.; Tanskanen, P.; Marquis, G. Finite element methods for structural hot spot stress determination—A comparison of procedures. Int. J. Fatigue 2004, 26, 1147–1157. [Google Scholar] [CrossRef]
- Hobbacher, A.F. Recommendations for Fatigue Design of Welded Joints and Components. In International Institute of Welding Collection; Springer: Cham, Switzerland, 2016. [Google Scholar] [CrossRef]
- Zhu, Z.W.; Yuan, T.; Xiang, Z.; Huang, Y.; Zhou, Y.E.; Shao, X.D. Behavior and fatigue performance of details in an ortho-tropic steel bridge with UHPC-deck plate composite system under in-service traffic flows. J. Bridge Eng. 2018, 23, 04017142. [Google Scholar] [CrossRef]
- Peng, B.; Shao, X.D. Study on fatigue performance of lightweight composite bridge deck with closed ribs. China Civ. Eng. J. 2017, 50, 89–96. [Google Scholar]
- JTG D64-2015; Specifications for Design of Highway Steel Bridge. People Communications Press: Beijing, China, 2015.
- BS EN 1991-2; Eurocode 1: Actions on Structures–Part 2: Traffic Loads on Bridges. CEN-European Committee for Standardization: Brussels, Belgium, 2003.
- Wu, G.; Chen, F.; Pan, X.; Xu, M.; Zhu, X. Using the visual intervention influence of pavement markings for rutting mitigation–part I: Preliminary experiments and field tests. Int. J. Pavement Eng. 2017, 20, 734–746. [Google Scholar] [CrossRef]
- Mecheri, S.; Rosey, F.; Lobjois, R. The effects of lane width, shoulder width, and road cross-sectional reallocation on drivers’ behavioral adaptations. Accid. Anal. Prev. 2017, 104, 65–73. [Google Scholar] [CrossRef]
- Timm, D.H.; Priest, A.L. Wheel Wander at the NCAT Test Track; Report No. 05-02; National Center for Asphalt Technology: Auburn, AL, USA, 2005. [Google Scholar]
- Kim, N.S. Statistical analysis on lateral wheel path distributions of 2nd and 3rd traffic lanes. J. Soc. Disaster Inf. 2009, 5, 30–44. [Google Scholar]
- Song, M.T.; Chen, F. The influence of autonomous vehicles on asphalt pavement’s service life and maintenance cost. China J. Highw. Transp. 2022, 35, 125–134. [Google Scholar]
- BS EN 1993-1-9; Eurocode 3: Design of Steel Structures–Part 1-9: Fatigue. CEN-European Committee for Standardization: Brus-sels, Belgium, 2005.
- Miner, M.A. Cumulative Damage in Fatigue. J. Appl. Mech. 1945, 12, 159–164. [Google Scholar] [CrossRef]
- Deng, L.; Zou, S.; Wang, W.; Kong, X. Fatigue performance evaluation for composite OSD using UHPC under dynamic vehicle loading. Eng. Struct. 2021, 232, 111831. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Element Type | Young’s Modulus (GPa) | Poisson’s Ratio | Density (kg/m3) |
|---|---|---|---|---|
| steel plates | SHELL181 | 210 | 0.3 | 7850 |
| UHPC | SOLID185 | 42.6 | 0.2 | 2700 |
| short studs | BEAM189 | 210 | 0.3 | 7850 |
| Fatigue Detail | Stress Type | Type of Hot Spot | Extrapolation Path | Stress Type *1 | Detail Category |
|---|---|---|---|---|---|
| D1 | Hot spot | a | Linear | SX | 90 |
| D2 | Hot spot | a | Linear | SY’/SY’’ | 90 |
| D3 | Nominal | — | — | SZ | 71 |
| D4 | Hot spot | a | Linear | SZ | 90 |
| D5 | Hot spot | a | Linear | SY’/SY’’ | 90 |
| D6 | Hot spot | b | Quadratic | S1 *2 | 90 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, S.; Han, D.; Wang, W.; Cao, R. Effect of Autonomous Vehicles on Fatigue Life of Orthotropic Steel Decks. Sensors 2022, 22, 9353. https://doi.org/10.3390/s22239353
Zou S, Han D, Wang W, Cao R. Effect of Autonomous Vehicles on Fatigue Life of Orthotropic Steel Decks. Sensors. 2022; 22(23):9353. https://doi.org/10.3390/s22239353
Chicago/Turabian StyleZou, Shengquan, Dayong Han, Wei Wang, and Ran Cao. 2022. "Effect of Autonomous Vehicles on Fatigue Life of Orthotropic Steel Decks" Sensors 22, no. 23: 9353. https://doi.org/10.3390/s22239353
APA StyleZou, S., Han, D., Wang, W., & Cao, R. (2022). Effect of Autonomous Vehicles on Fatigue Life of Orthotropic Steel Decks. Sensors, 22(23), 9353. https://doi.org/10.3390/s22239353