
Strain Gauge Measuring System for Subsensory Micromotions Analysis as an Element of a Hybrid Human–Machine Interface

Abstract
1. Introduction
2. Materials and Methods
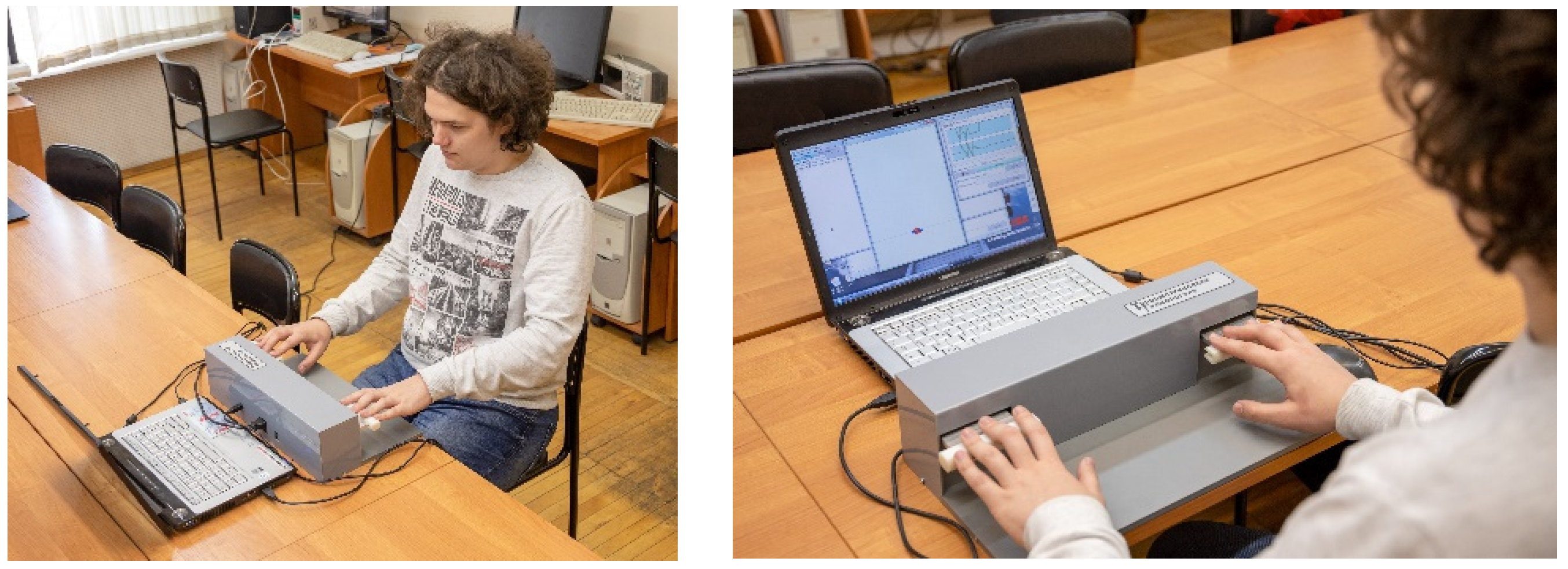
2.1. Testing Procedure
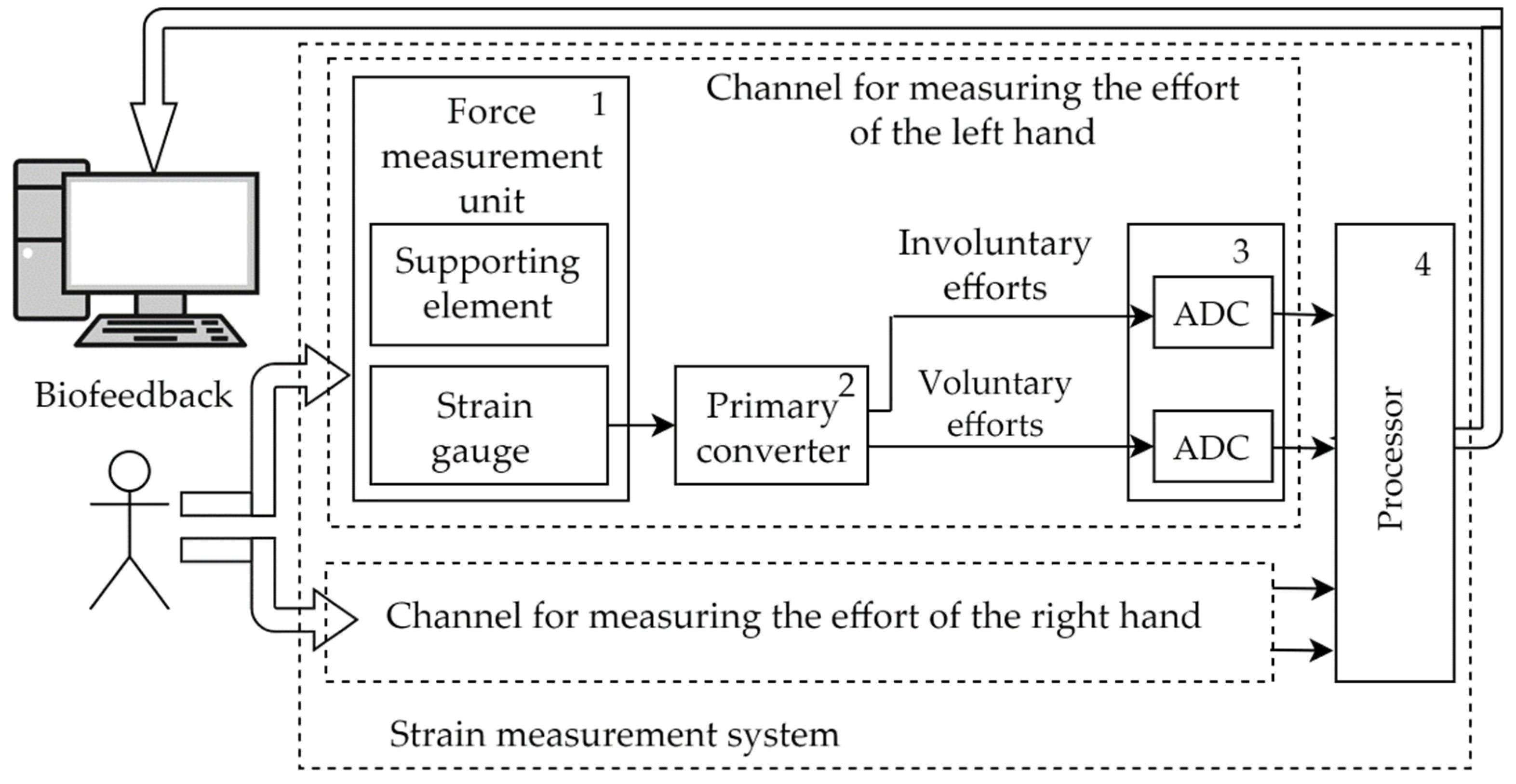
2.2. Strain Gauge Measuring System
- A force measurement unit;
- A primary converter;
- Analog-to-digital converters;
- A processor.
3. Development of the Measurement System
3.1. Force Measurement Unit
- The maximum magnitude of the voluntary force sufficient for research for different groups of persons should be 10 kg.
- The amplitude of the isometric force oscillation does not exceed 2% of the voluntary force.
- The forces produced by involuntary arm oscillation are mostly periodic; significant oscillations are detected in the range of 0–16 Hz.
- Standard capacities—25 kg;
- Type of force transmitted—Bi-directional (tension/compression);
- Rated output (RO)—3.0 mV/V;
- Zero balance—±1.0% of RO;
- Rated output tolerance—±0.25% of RO.
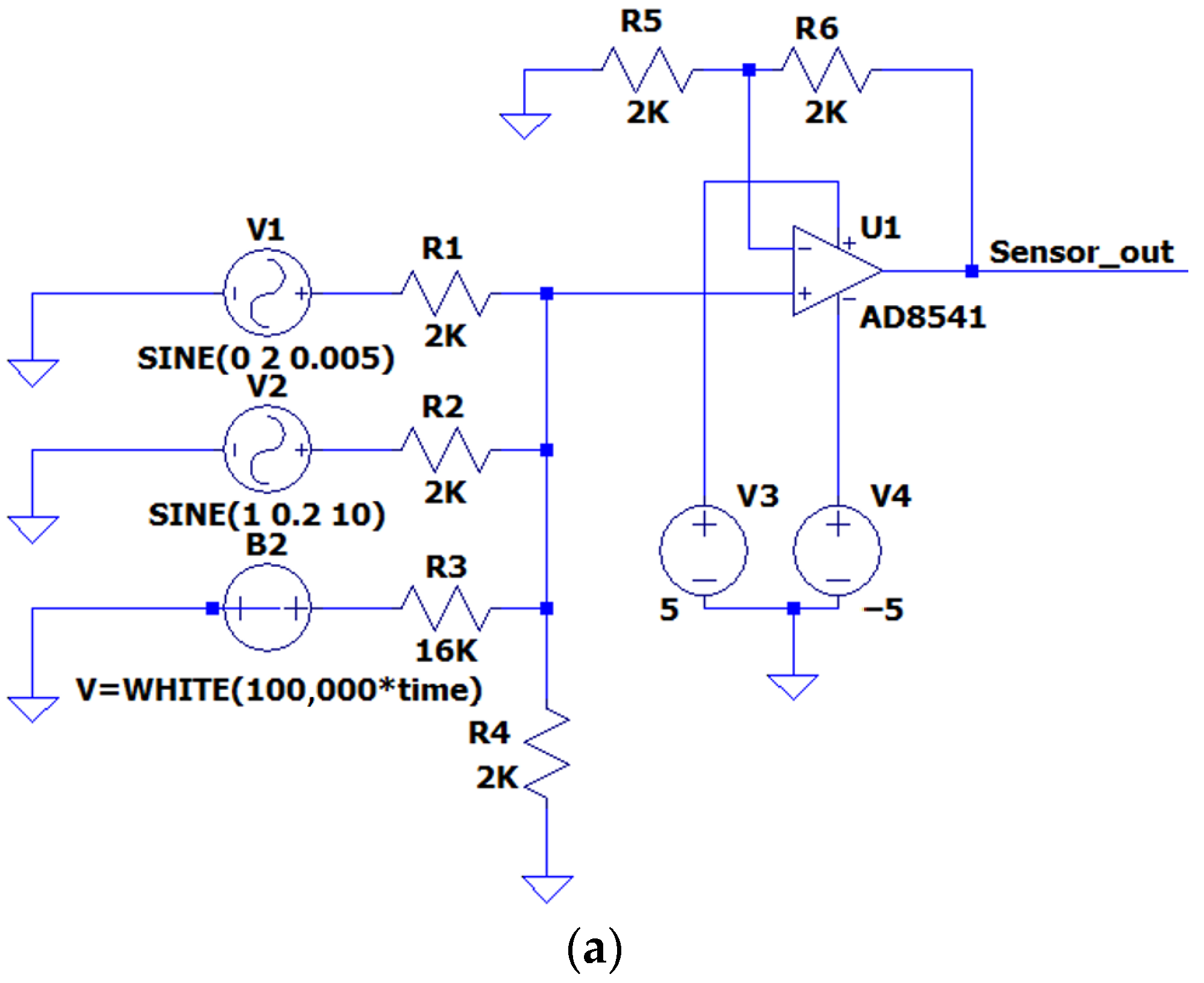
3.2. Primary Converter
- Sine with an amplitude of 2 V and a frequency of 0.005 Hz (provides a smooth signal change, simulates isometric force);
- Sine with amplitude of 0.2 V and frequency of 10 Hz (provides generation of the frequency component of the signal, simulating a tremor);
- White noise.
4. Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Freedman, D.J.; Ibos, G. An Integrative Framework for Sensory, Motor, and Cognitive Functions of the Posterior Parietal Cortex. Neuron 2018, 97, 1219–1234. [Google Scholar] [CrossRef]
- Arlt, C.; Barroso-Luque, R.; Kira, S.; Bruno, C.A.; Xia, N.; Chettih, N.A.; Soares, S.; Pettit, N.L.; Harvey, C.D. Cognitive experience alters cortical involvement in goal-directed navigation. eLife 2022, 11, e76051. [Google Scholar] [CrossRef] [PubMed]
- Salihu, A.T.; Hill, K.D.; Jaberzadeh, S. Effect of cognitive task complexity on dual task postural stability: A systematic review and meta-analysis. Exp. Brain Res. 2022, 240, 703–731. [Google Scholar] [CrossRef] [PubMed]
- Bohle, H.; Rimpel, J.; Schauenburg, G.; Gebel, A.; Stelzel, C.; Heinzel, S.; Rapp, M.; Granacher, U. Behavioral and Neural Correlates of Cognitive-Motor Interference during Multitasking in Young and Old Adults. Neural Plast. 2019, 2019, 9478656. [Google Scholar] [CrossRef]
- Ward, N.; Menta, A.; Ulichney, V.; Raileanu, C.; Wooten, T.; Hussey, E.K.; Marfeo, E. The Specificity of Cognitive-Motor Dual-Task Interference on Balance in Young and Older Adults. Front. Aging Neurosci. 2022, 13, 804936. [Google Scholar] [CrossRef] [PubMed]
- Van Cutsem, J.; Marcora, S.; De Pauw, K.; Bailey, S.; Meeusen, R.; Roelands, B. The Effects of Mental Fatigue on Physical Performance: A Systematic Review. Sport. Med. 2017, 47, 1569–1588. [Google Scholar] [CrossRef]
- Pageaux, B.; Lepers, R. The effects of mental fatigue on sport-related performance. In Sport and the Brain: The Science of Preparing, Enduring and Winning; Marcora, S., Sarkar, M., Eds.; Elsevier Academic Press: London, UK, 2018; Volume 240, pp. 291–315. [Google Scholar]
- Brown, D.M.Y.; Graham, J.D.; Innes, K.I.; Harris, S.; Flemington, A.; Bray, S.R. Effects of Prior Cognitive Exertion on Physical Performance: A Systematic Review and Meta-analysis. Sport. Med. 2020, 50, 497–529. [Google Scholar] [CrossRef]
- Latorre, A.; Hallett, M.; Deuschl, G.; Bhatia, K.P. The MDS consensus tremor classification: The best way to classify patients with tremor at present. J. Neurol. Sci. 2022, 435, 120191. [Google Scholar] [CrossRef]
- Kamble, N.; Pal, P.K. Tremor syndromes: A review. Neurol. India 2018, 66, 36–47. [Google Scholar]
- Cersonsky, T.; Kellner, S.; Chapman, S.; Huey, E.; Louis, E.; Cosentino, S. Profiles of Normal Cognition in Essential Tremor. J. Int. Neuropsychol. Soc. 2022, 26, 197–209. [Google Scholar] [CrossRef]
- Lakie, M.; Walsh, E.G.; Arblaster, L.A.; Villagra, F.; Roberts, R.C. Limb temperature and human tremors. J. Neurol. Neurosurg. Psychiatry 1994, 57, 35–42. [Google Scholar] [CrossRef] [PubMed]
- Budini, F.; Labanca, L.; Scholz, M.; Macaluso, A. Tremor, finger and hand dexterity and force steadiness, do not change after mental fatigue in healthy humans. PLoS ONE 2022, 17, e0272033. [Google Scholar] [CrossRef] [PubMed]
- Brittain, J.S.; Cagnan, H.; Mehta, A.R.; Saifee, T.A.; Edwards, M.J.; Brown, P. Distinguishing the central drive to tremor in Parkinson‘s disease and essential tremor. J. Neurosci. 2015, 35, 795–806. [Google Scholar] [CrossRef] [PubMed]
- Aly, N.M.; Playfer, J.R.; Smith, S.L.; Halliday, D.M. A novel computer-based technique for the assessment of tremor in Parkinson‘s disease. Age Ageing 2007, 36, 395–399. [Google Scholar] [CrossRef] [PubMed]
- Jackson, L.; Klassen, B.T.; Hassan, A.; Bower, J.H.; Matsumoto, J.Y.; Coon, E.A.; Ali, F. Utility of tremor electrophysiology studies. Clin. Park. Relat. Disord. 2021, 24, 100108. [Google Scholar] [CrossRef]
- Wang, X.; Garg, S.; Tran, S.N.; Bai, Q.; Alty, J. Hand tremor detection in videos with cluttered background using neural network based approaches. Health Inf. Sci. Syst. 2021, 9, 30. [Google Scholar] [CrossRef]
- Singh, R.E.; Fleury, J.M.; Gupta, S.; Bachman, N.P.; Alumbaugh, B.; White, G. Involuntary Breathing Movement Pattern Recognition and Classification via Force-Based Sensors. Biomechanics 2022, 2, 525–537. [Google Scholar] [CrossRef]
- Escudeiro, G.P.; Andrade, A.D.O.; Cabral, A.M.; Leite, M.A.A.; Monteiro, L.V.; Silva, I.D.G.; Pessôa, B.L. Inertial sensors in the motor assessment of Parkinson’s Disease in patients who underwent Pallidotomy. Res. Soc. Dev. 2021, 10, e373101522825. [Google Scholar] [CrossRef]
- Milano, F.; Cerro, G.; Santoni, F.; De Angelis, A.; Miele, G.; Rodio, A.; Moschitta, A.; Ferrigno, L.; Carbone, P. Parkinson’s Disease Patient Monitoring: A Real-Time Tracking and Tremor Detection System Based on Magnetic Measurements. Sensors 2021, 21, 4196. [Google Scholar] [CrossRef]
- Jeon, H.; Lee, W.; Park, H.; Lee, H.; Kim, S.; Kim, H.; Jeon, B.; Park, K. Automatic classification of tremor severity in Parkinson’s disease using a wearable device. Sensors 2017, 17, 2067. [Google Scholar] [CrossRef]
- Vescio, B.; Nisticò, R.; Augimeri, A.; Quattrone, A.; Crasà, M.; Quattrone, A. Development and Validation of a New Wearable Mobile Device for the Automated Detection of Resting Tremor in Parkinson‘s Disease and Essential Tremor. Diagnostics 2021, 11, 200. [Google Scholar] [CrossRef]
- Grimaldi, G.; Manto, M. Neurological Tremor: Sensors, Signal Processing and Emerging Applications. Sensors 2010, 10, 1399–1422. [Google Scholar] [CrossRef] [PubMed]
- Vial, F.; Kassavetis, P.; Merchant, S.H.I.; Haubenberger, D.; Hallett, M. How to do an electrophysiological study of tremor. Clin. Neurophysiol. Pract. 2019, 4, 134–142. [Google Scholar] [CrossRef]
- Novak, N.; Newell, K. Physiological Tremor (8–12 Hz component) in Isometric Force Control. Neurosci. Lett. 2017, 641, 87–93. [Google Scholar] [CrossRef]
- Castronovo, A.M.; Giles Doran, C.; Holden, M.; Severini, G. Analysis of the Effectiveness of Sub-sensory Electrical Noise Stimulation During Visuomotor Adaptations in Different Visual Feedback Conditions. Front. Bioeng. Biotechnol. 2019, 7, 399. [Google Scholar] [CrossRef] [PubMed]
- Aleksanyan, Z.; Bureneva, O.; Safyannikov, N. Tensometric tremorography in high-precision medical diagnostic systems. Med. Devices Evid. Res. 2018, 11, 321–330. [Google Scholar] [CrossRef] [PubMed]
- Safyannikov, N.; Bureneva, O.; Zhirnova, O. Isometric Method of Continuous Streaming Monitoring of Neuro-physiological States of a Person for the Professional Diagnostics and Selection. In Proceedings of the Third International Conference on Human Factors in Complex Technical Systems and Environments (ERGO), St. Petersburg, Russia, 4–7 July 2018; pp. 150–154. [Google Scholar] [CrossRef]
- Bureneva, O.; Safyannikov, N.; Aleksanyan, Z. Machine Methods of Tremorogram Analysis for Human Functional State Estimation. In Proceedings of the III International Conference on Neural Networks and Neurotechnologies (NeuroNT), St. Petersburg, Russia, 16 June 2022. [Google Scholar] [CrossRef]
- Bureneva, O.; Safyannikov, N.; Aleksanyan, Z. Singular Spectrum Analysis of Tremorograms for Human Neuromotor Reaction Estimation. Mathematics 2022, 10, 1794. [Google Scholar] [CrossRef]
- S-Type Load Cell. Available online: http://www.vishaypg.com/docs/11710/stc.pdf (accessed on 7 November 2022).
- Kester, W. Practical Design Techniques for Sensor Signal Conditioning; Analog Devices: Wilmington, MA, USA, 1999; pp. 96–109. [Google Scholar]
- Massabrio, G. Semiconductor Device Modeling With Spice, 3rd ed.; MC GRAW HILL: India, 2010. [Google Scholar]
- Nyquist, H. Certain Topics in Telegraph Transmission Theory. Trans. Am. Inst. Electr. Eng. 1928, 47, 617–644. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | Time | LConst | LTrem | RConst | RTrem |
|---|---|---|---|---|---|
| 1 | 0 | 13 | −2 | 284 | −1 |
| 2 | 0.00102 | 14 | −2 | 285 | −1 |
| 3 | 0.002041 | 13 | −2 | 285 | 0 |
| 4 | 0.003061 | 13 | −2 | 284 | −2 |
| 5 | 0.004082 | 15 | −3 | 285 | 0 |
| 6 | 0.005102 | 13 | −1 | 283 | 1 |
| 7 | 0.006122 | 14 | −2 | 284 | −3 |
| 8 | 0.007143 | 14 | −2 | 287 | −2 |
| 9 | 0.008163 | 14 | −3 | 284 | 0 |
| 0 | 0.009184 | 13 | −2 | 284 | −3 |
| 11 | 0.010204 | 15 | −3 | 287 | −2 |
| 12 | 0.011224 | 14 | −2 | 285 | 0 |
| 13 | 0.012245 | 13 | −1 | 283 | −1 |
| 14 | 0.013265 | 13 | −2 | 286 | −1 |
| 15 | 0.014286 | 13 | −2 | 284 | −1 |
| … | … | ||||
| 979 | 0.997959 | 13 | −2 | 284 | −1 |
| 980 | 0.99898 | 14 | −2 | 285 | −2 |
| Average values | 13.7 | −2.0255 | 284.698 | −1.09796 | |
| Deviations | 0.240858 | 0.139287 | 0.360159 | 0.323387 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bureneva, O.; Safyannikov, N. Strain Gauge Measuring System for Subsensory Micromotions Analysis as an Element of a Hybrid Human–Machine Interface. Sensors 2022, 22, 9146. https://doi.org/10.3390/s22239146
Bureneva O, Safyannikov N. Strain Gauge Measuring System for Subsensory Micromotions Analysis as an Element of a Hybrid Human–Machine Interface. Sensors. 2022; 22(23):9146. https://doi.org/10.3390/s22239146
Chicago/Turabian StyleBureneva, Olga, and Nikolay Safyannikov. 2022. "Strain Gauge Measuring System for Subsensory Micromotions Analysis as an Element of a Hybrid Human–Machine Interface" Sensors 22, no. 23: 9146. https://doi.org/10.3390/s22239146
APA StyleBureneva, O., & Safyannikov, N. (2022). Strain Gauge Measuring System for Subsensory Micromotions Analysis as an Element of a Hybrid Human–Machine Interface. Sensors, 22(23), 9146. https://doi.org/10.3390/s22239146