
Vehicular Environment Identification Based on Channel State Information and Deep Learning



Abstract
1. Introduction
2. Related Work
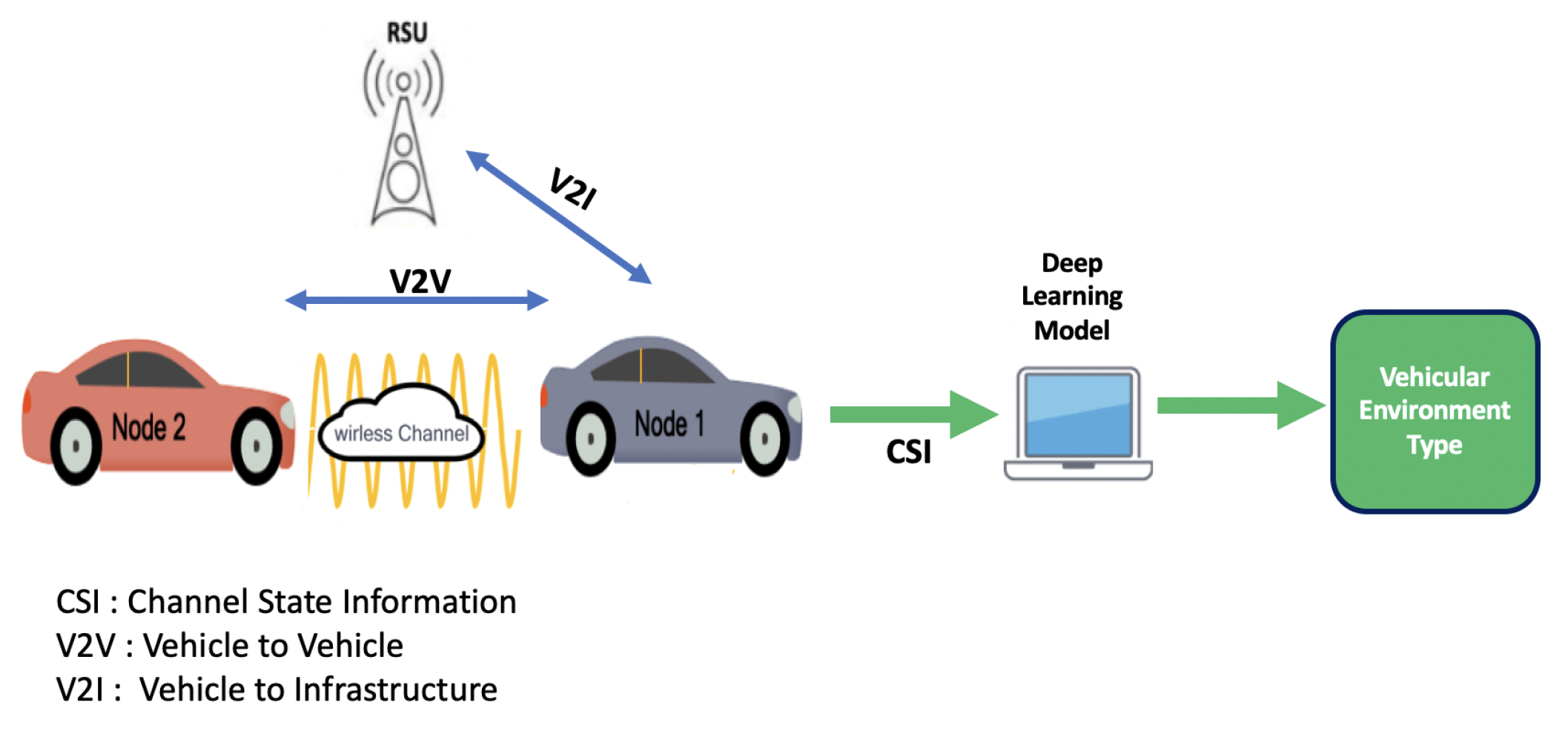
3. System Model
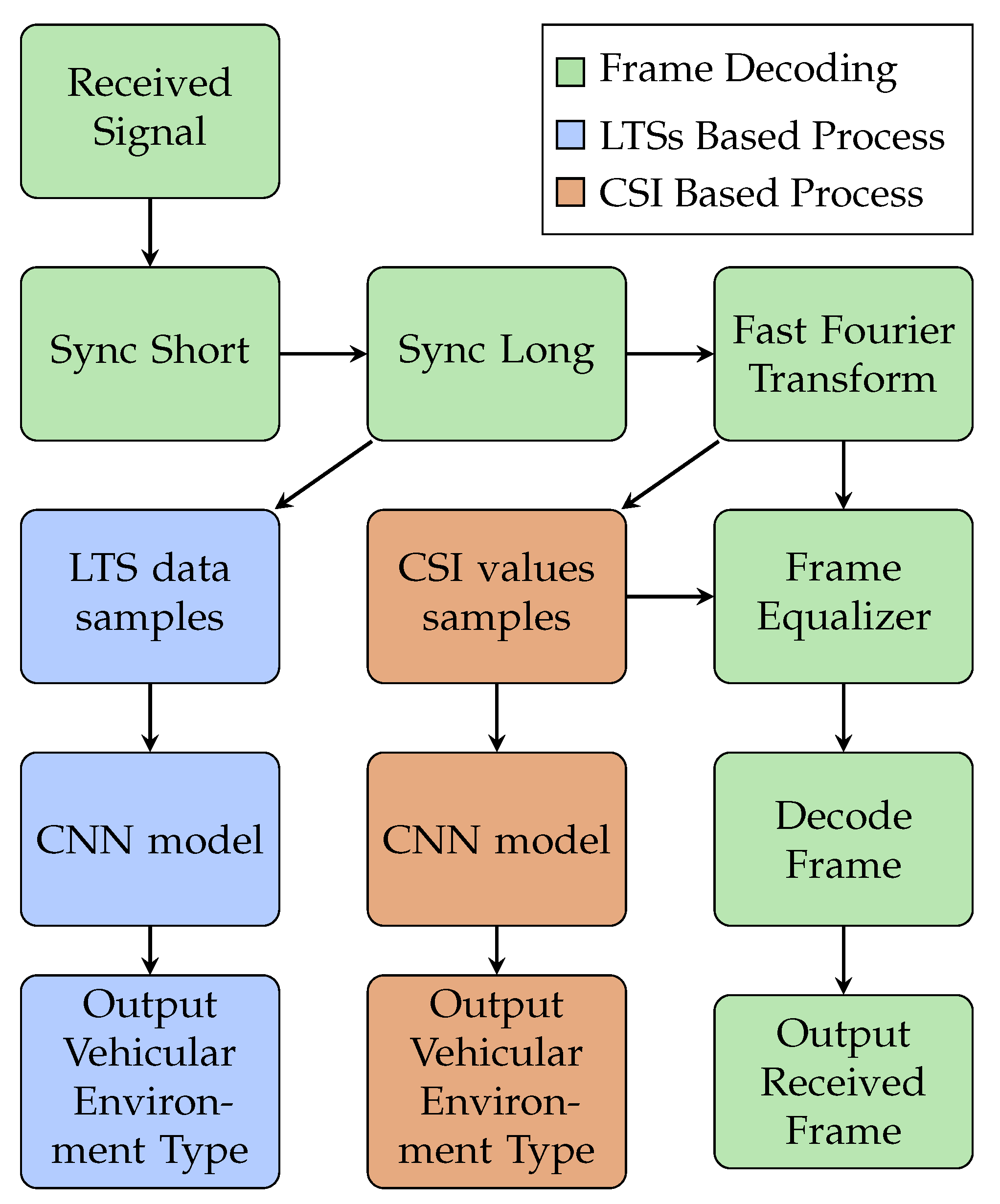
4. Vehicular Environment Identification Methodology
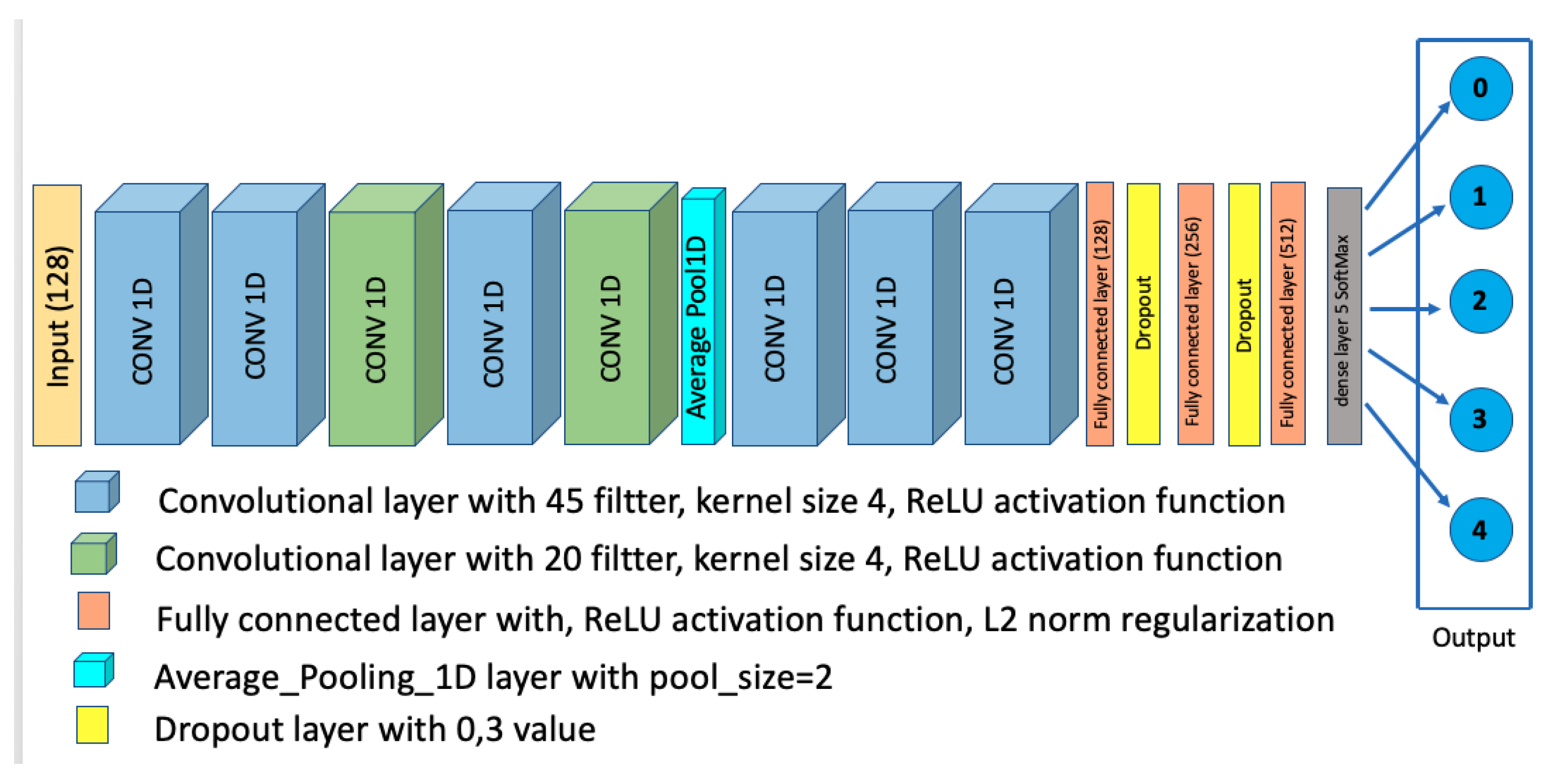
4.1. The Proposed Model
4.2. Data-Set Generation
5. Evaluation and Results
5.1. LTS Approach Performance Evaluation
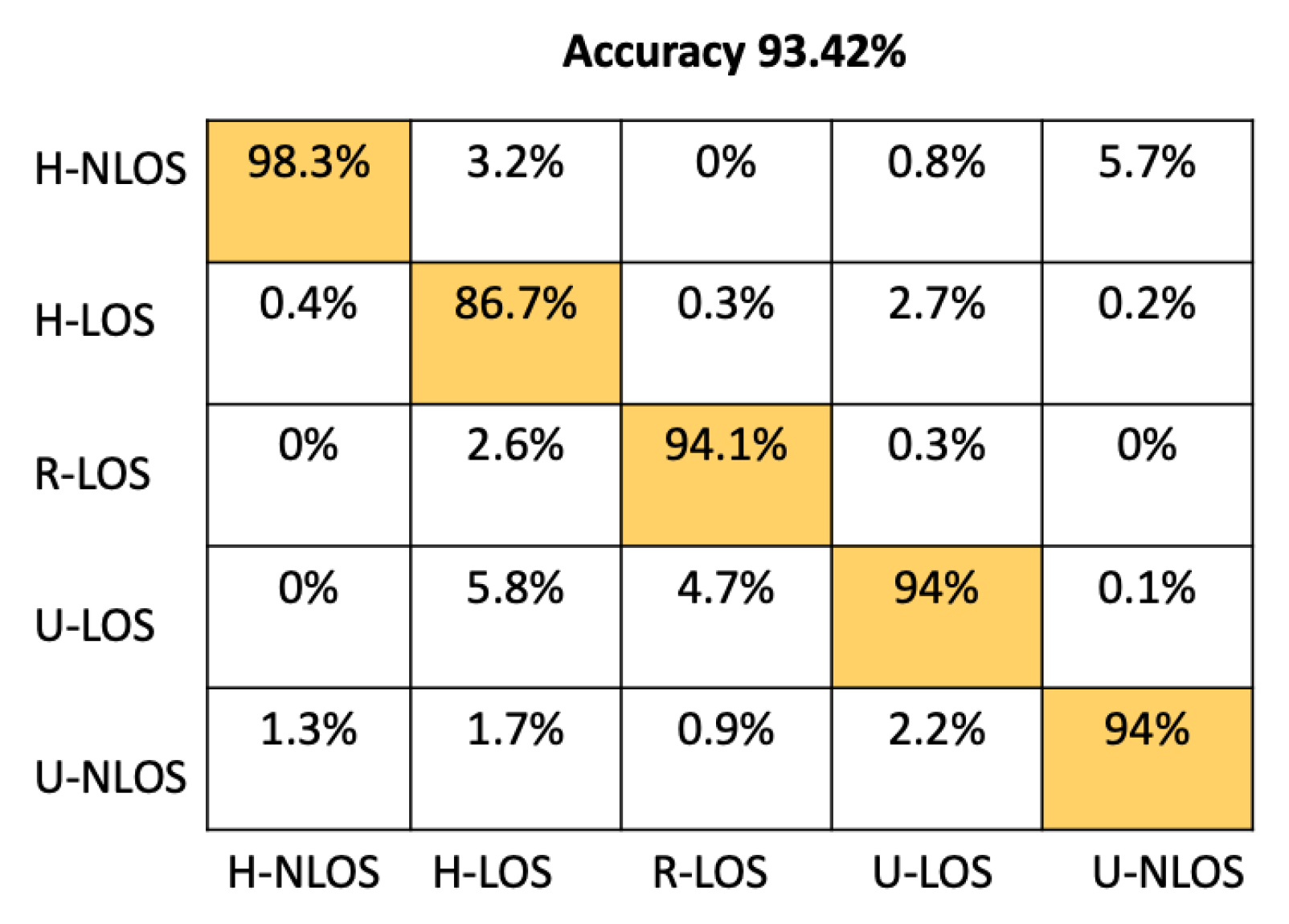
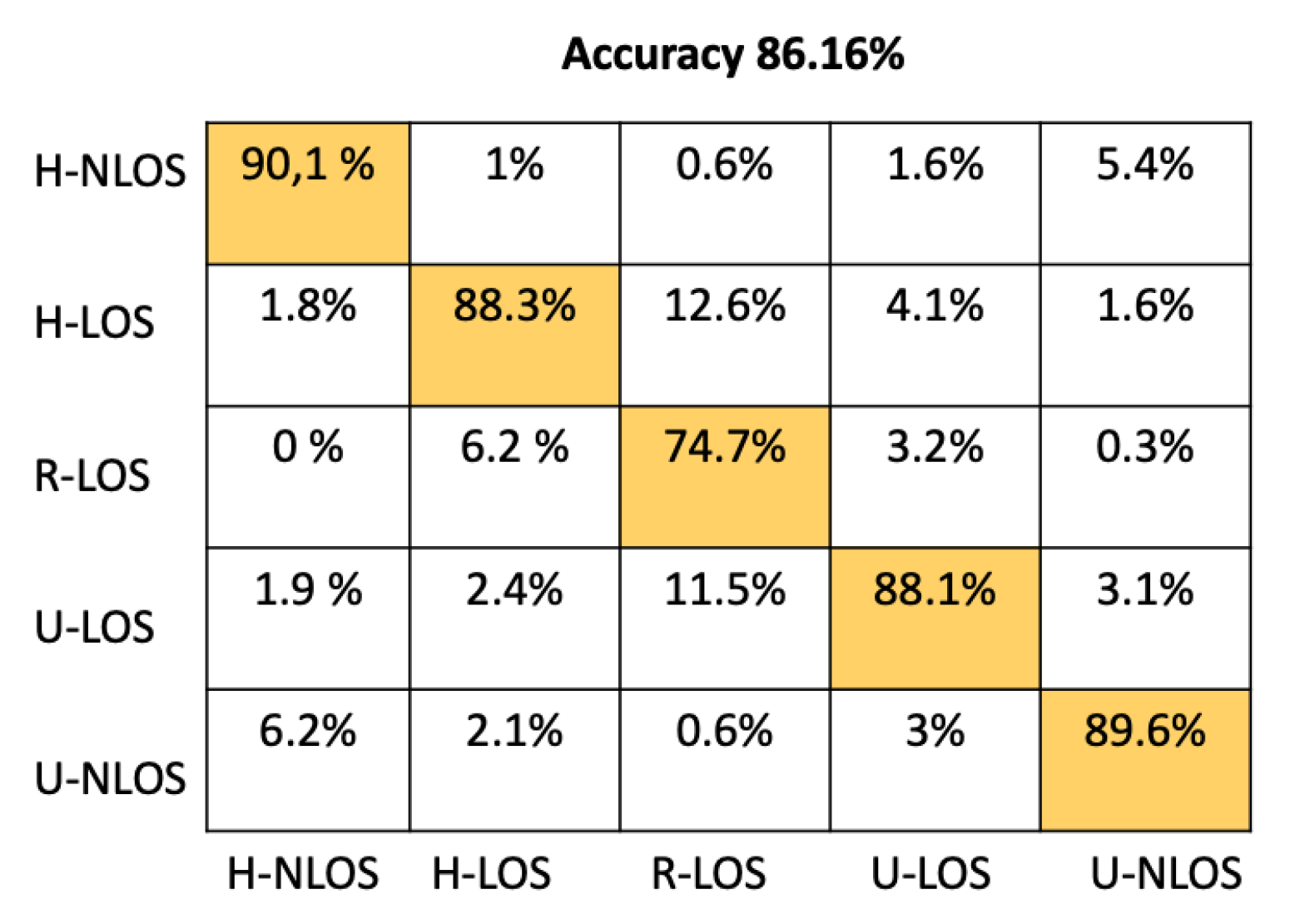
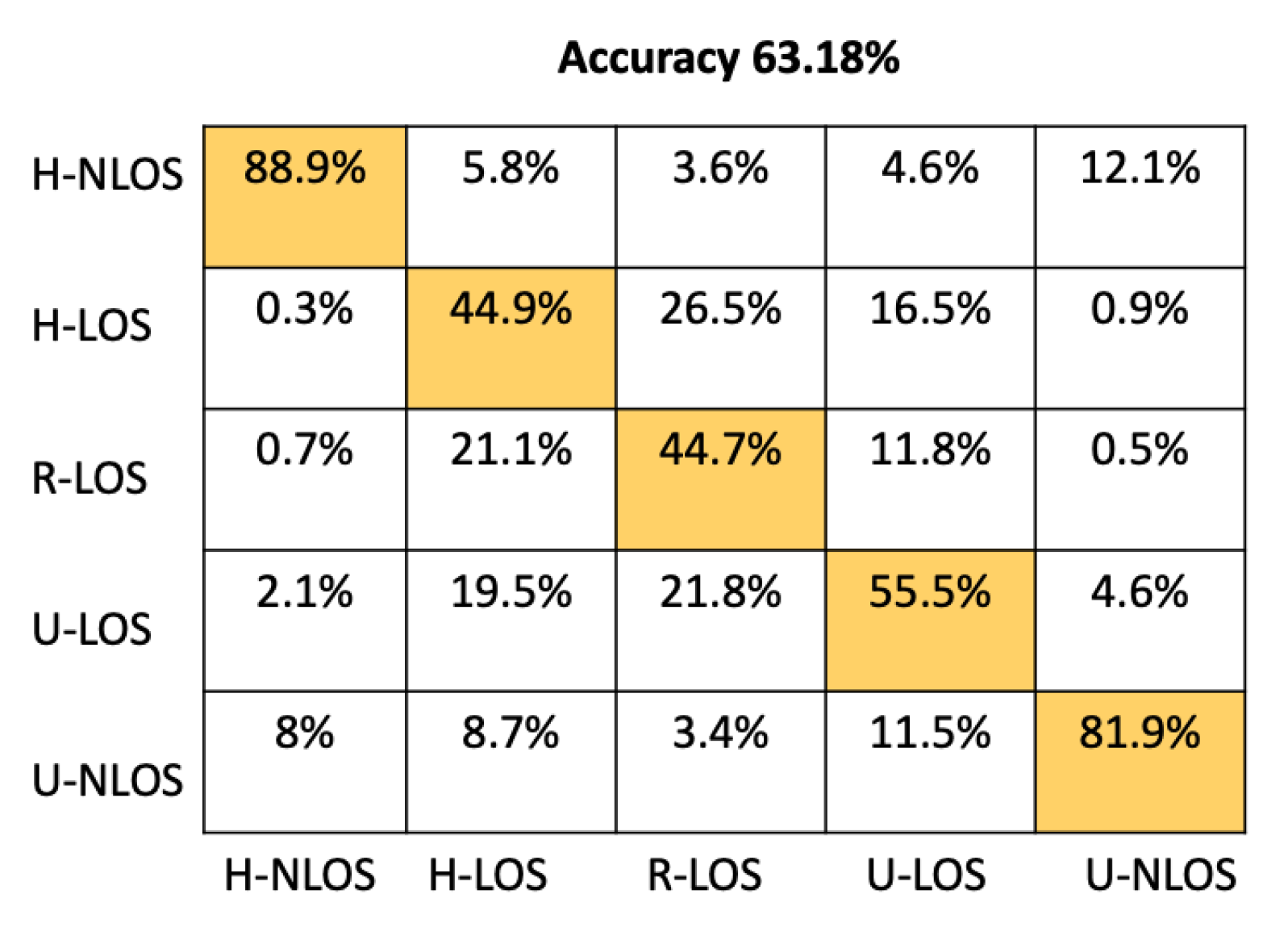
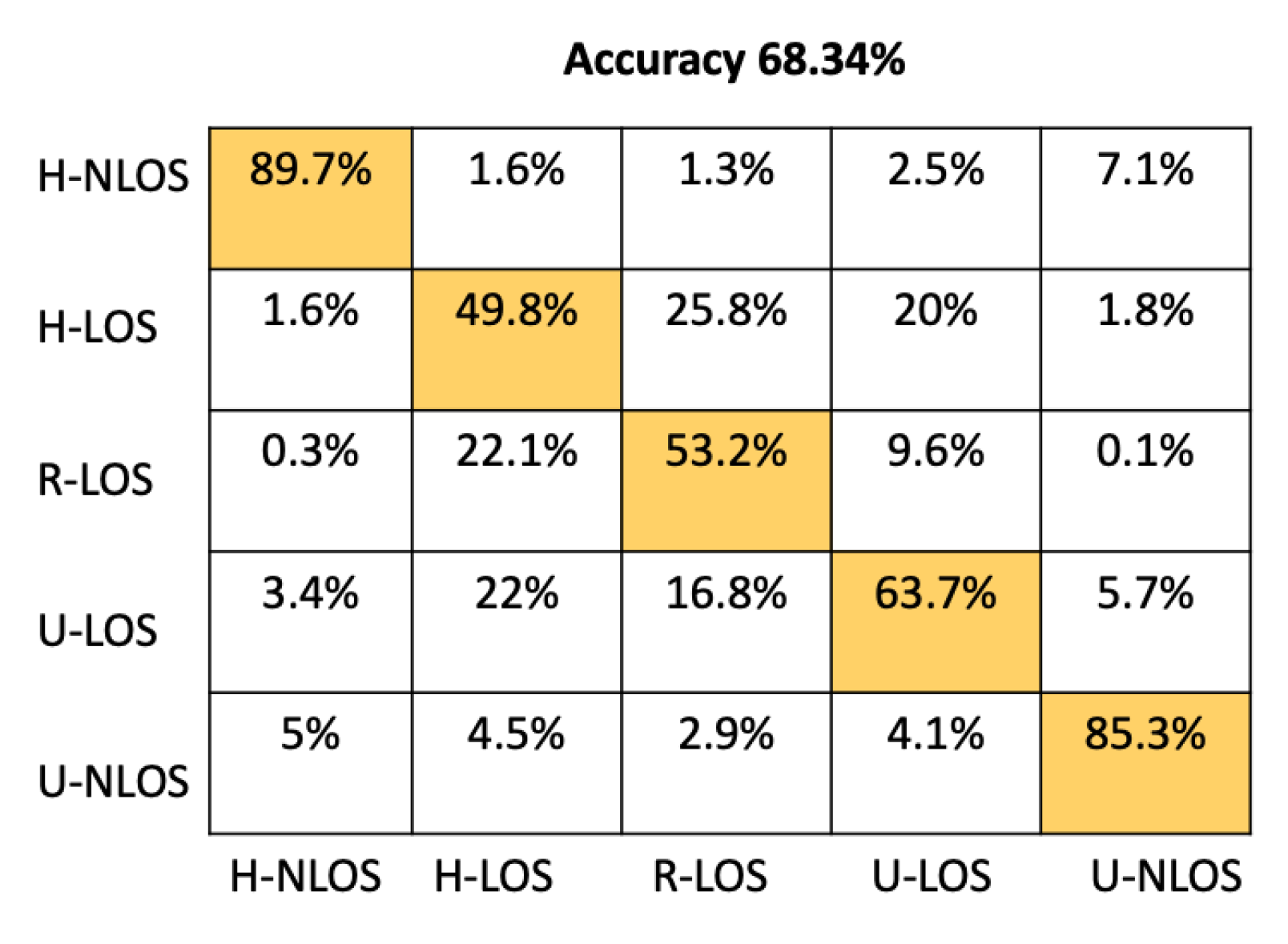
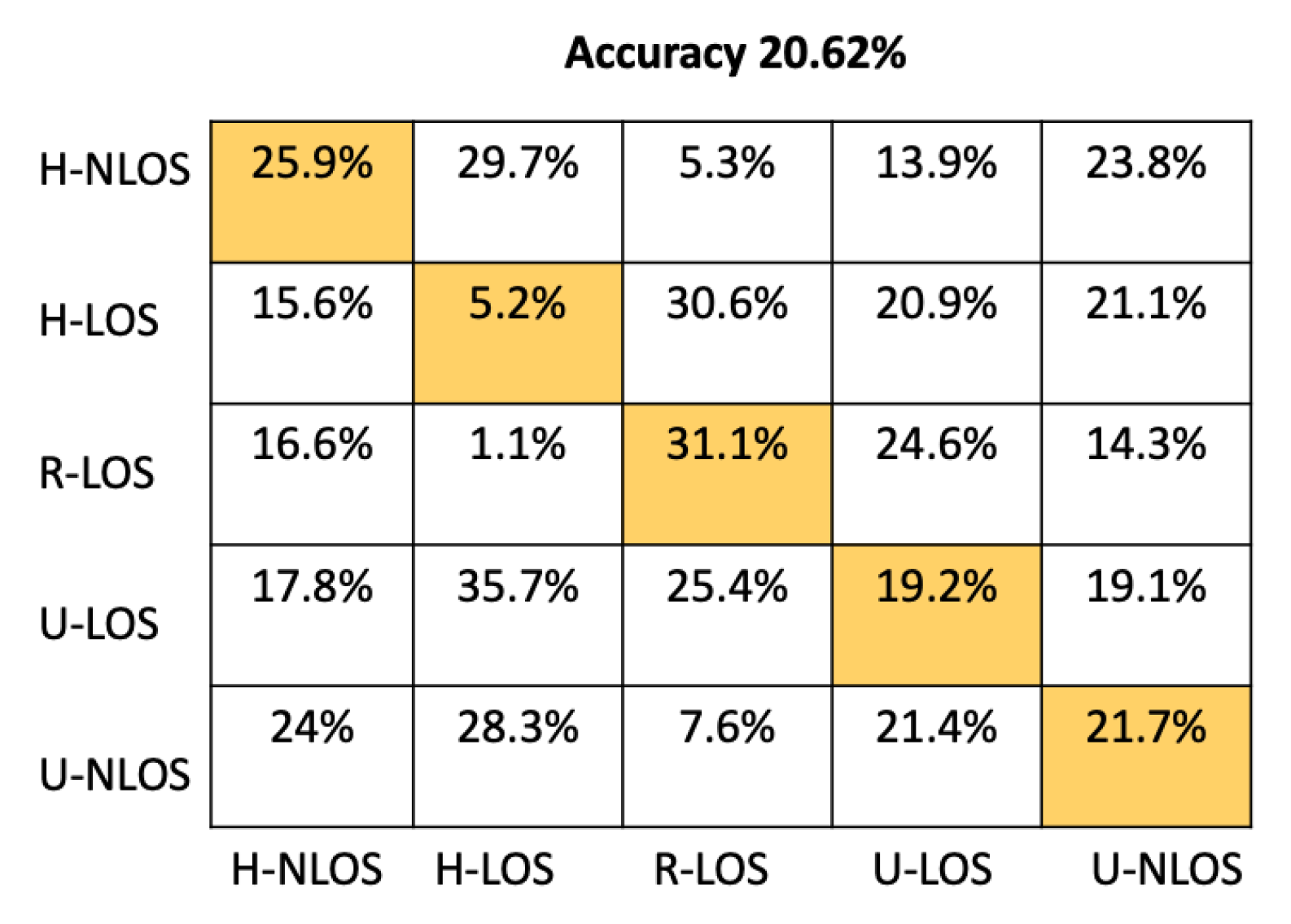
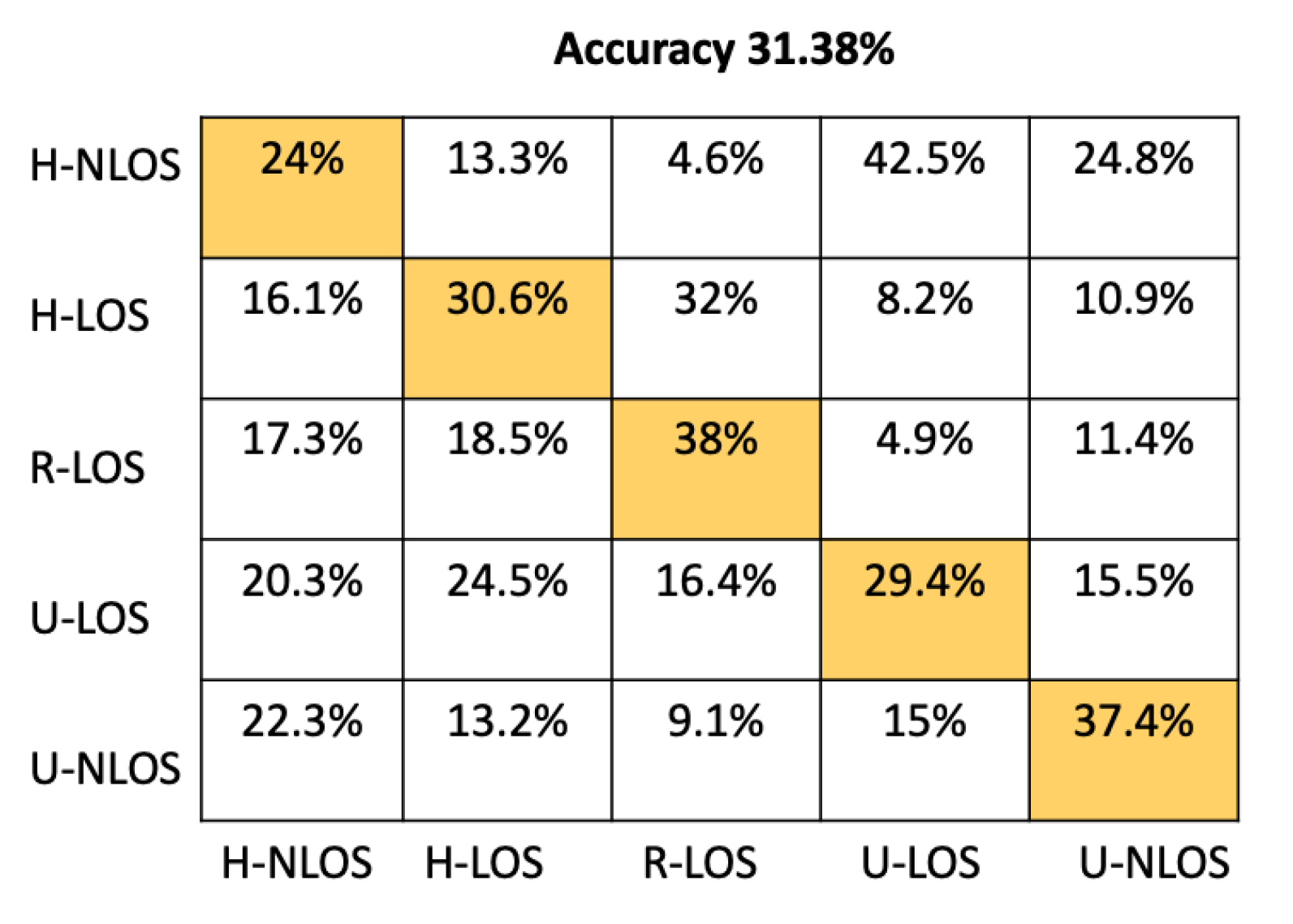
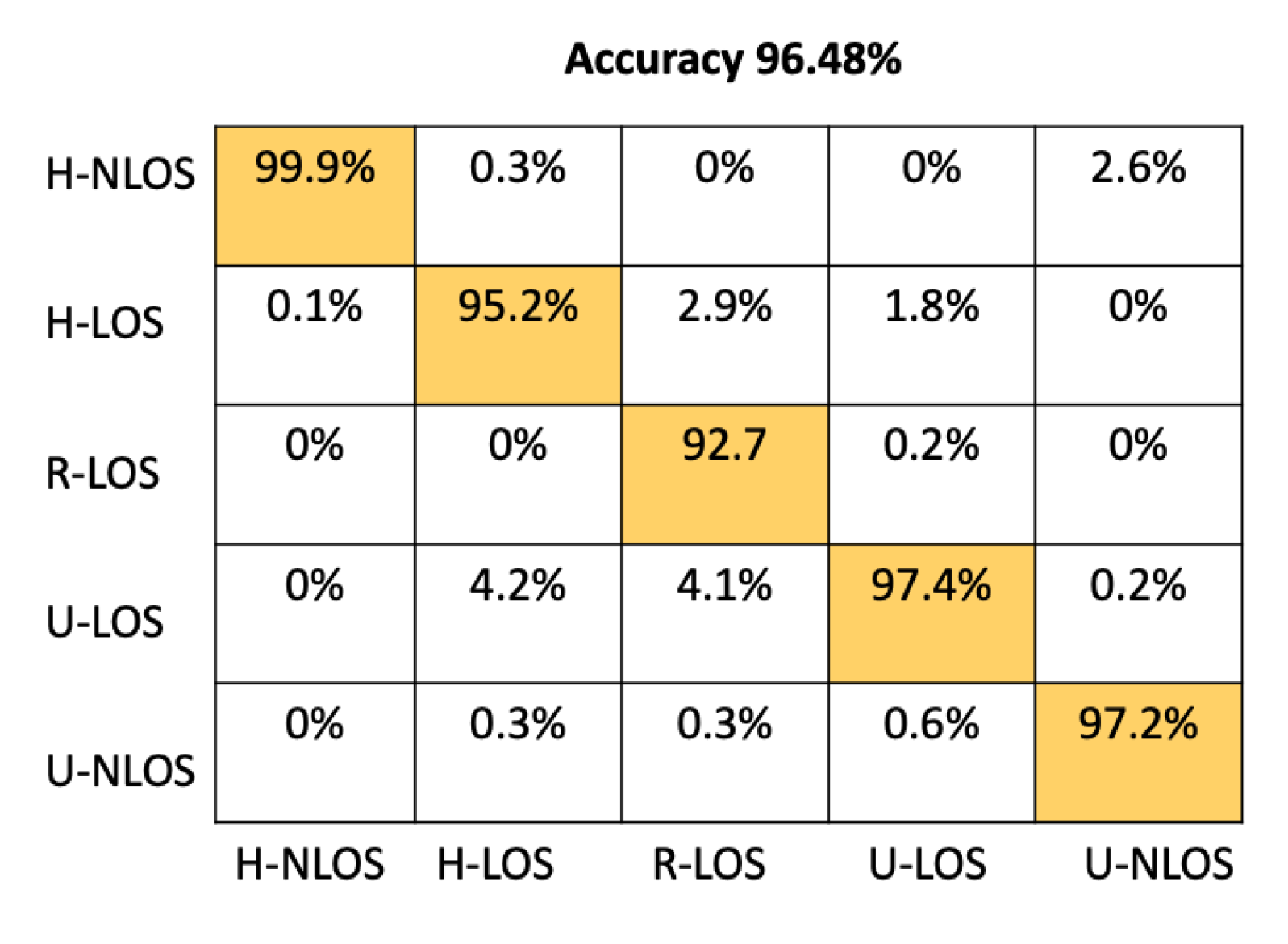
5.2. CSI Approach Performance Evaluation
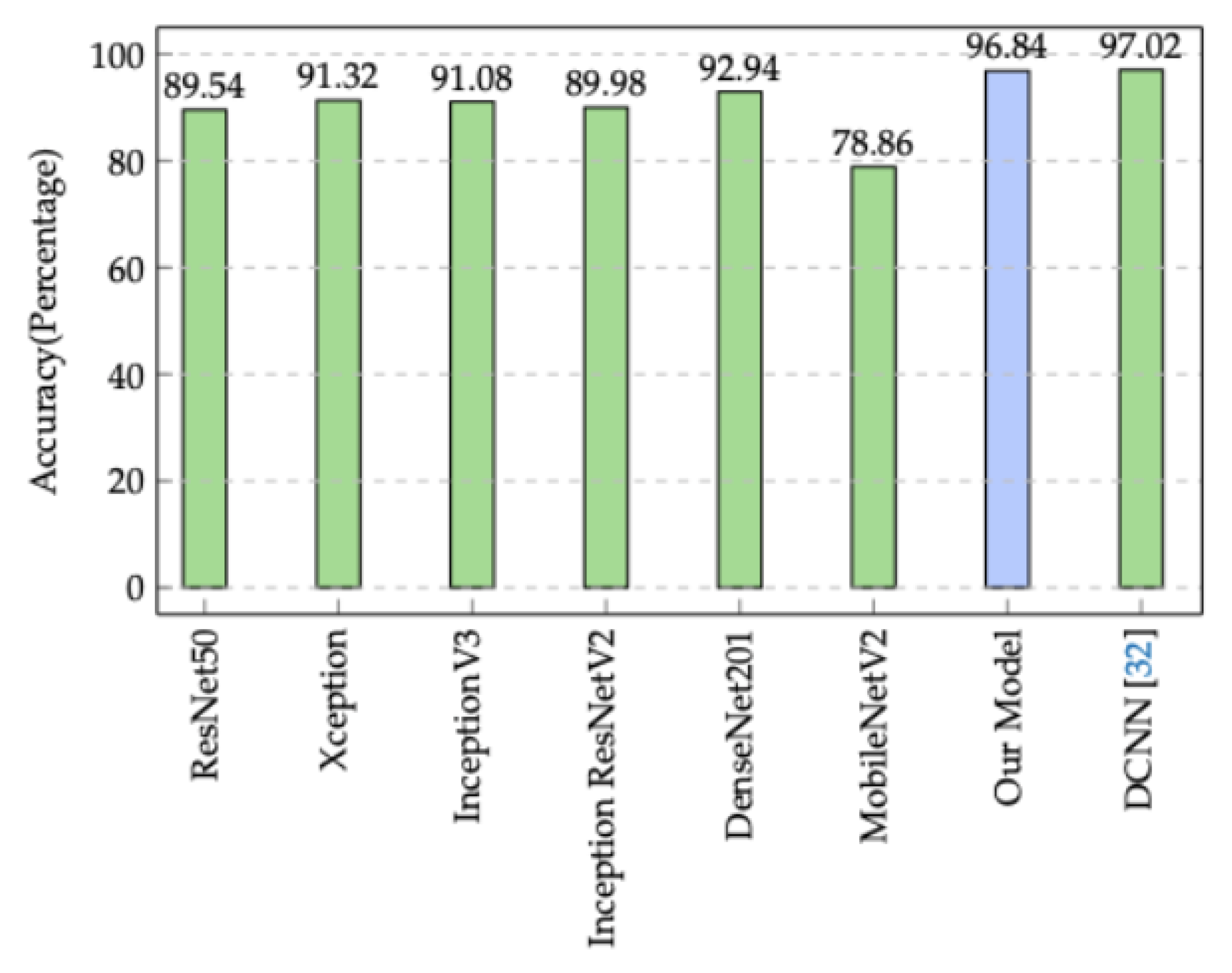
5.3. Comparison between Our Model and State-of-the-Art Architectures
5.4. Minimum Performance Overhead and Reliability
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kockelman, K.; Boyles, S.; Stone, P.; Fagnant, D.; Patel, R.; Levin, M.W.; Sharon, G.; Simoni, M.; Albert, M.; Fritz, H.; et al. An Assessment of Autonomous Vehicles: Traffic Impacts and Infrastructure Needs; Technical Report; University of Texas at Austin, Center for Transportation Research: Austin, TX, USA, 2017. [Google Scholar]
- Uhlemann, E. Time for autonomous vehicles to connect [connected vehicles]. IEEE Veh. Technol. Mag. 2018, 13, 10–13. [Google Scholar] [CrossRef]
- Yue, L.; Abdel-Aty, M.; Wu, Y.; Wang, L. Assessment of the safety benefits of vehicles’ advanced driver assistance, connectivity and low level automation systems. Accid. Anal. Prev. 2018, 117, 55–64. [Google Scholar] [CrossRef] [PubMed]
- Nahar, A.; Das, D. MetaLearn: Optimizing routing heuristics with a hybrid meta-learning approach in vehicular ad-hoc networks. Ad Hoc Netw. 2023, 138, 102996. [Google Scholar] [CrossRef]
- Abuelsamid, S. Toyota Has Big Plans to Get Cars Talking to Each Other and Infrastructure in the US. Forbes. 2018. Available online: https://www.forbes.com/sites/samabuelsamid/2018/04/16/toyota-launches-aggressive-v2x-communications-roll-out-from-2021/?sh=2eee16b4146c (accessed on 20 October 2022).
- Chen, C.; Seff, A.; Kornhauser, A.; Xiao, J. Deepdriving: Learning affordance for direct perception in autonomous driving. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 2722–2730. [Google Scholar]
- Okamoto, K.; Itti, L.; Tsiotras, P. Vision-based autonomous path following using a human driver control model with reliable input-feature value estimation. IEEE Trans. Intell. Veh. 2019, 4, 497–506. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, P.; Yin, Y.; Lin, L.; Wang, X. Human-like autonomous vehicle speed control by deep reinforcement learning with double Q-learning. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1251–1256. [Google Scholar]
- Seo, Y.W.; Lee, J.; Zhang, W.; Wettergreen, D. Recognition of highway workzones for reliable autonomous driving. IEEE Trans. Intell. Transp. Syst. 2014, 16, 708–718. [Google Scholar] [CrossRef]
- Sauer, A.; Savinov, N.; Geiger, A. Conditional affordance learning for driving in urban environments. arXiv 2018, arXiv:1806.06498. [Google Scholar]
- Kim, B.; Kim, D.; Park, S.; Jung, Y.; Yi, K. Automated complex urban driving based on enhanced environment representation with GPS/map, radar, lidar and vision. IFAC-PapersOnLine 2016, 49, 190–195. [Google Scholar] [CrossRef]
- Varga, R.; Costea, A.; Florea, H.; Giosan, I.; Nedevschi, S. Super-sensor for 360-degree environment perception: Point cloud segmentation using image features. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–8. [Google Scholar]
- Duan, X.; Jiang, H.; Tian, D.; Zou, T.; Zhou, J.; Cao, Y. V2I based environment perception for autonomous vehicles at intersections. China Commun. 2021, 18, 1–12. [Google Scholar] [CrossRef]
- Lee, D.H.; Chen, K.L.; Liou, K.H.; Liu, C.L.; Liu, J.L. Deep learning and control algorithms of direct perception for autonomous driving. Appl. Intell. 2021, 51, 237–247. [Google Scholar] [CrossRef]
- Florea, H.; Petrovai, A.; Giosan, I.; Oniga, F.; Varga, R.; Nedevschi, S. Enhanced perception for autonomous driving using semantic and geometric data fusion. Sensors 2022, 22, 5061. [Google Scholar] [CrossRef]
- Kabir, M.F.; Roy, S. Real-time vehicular accident prevention system using deep learning architecture. Expert Syst. Appl. 2022, 206, 117837. [Google Scholar] [CrossRef]
- Zhu, H.; Yuen, K.V.; Mihaylova, L.; Leung, H. Overview of environment perception for intelligent vehicles. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2584–2601. [Google Scholar] [CrossRef]
- Ribouh, S.; Phan, K.; Malawade, A.V.; El Hillali, Y.; Rivenq, A.; Al Faruque, M.A. Channel State Information Based Cryptographic KeyGeneration for Intelligent Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2020; to appear. [Google Scholar]
- Alexander, P.; Haley, D.; Grant, A. Cooperative intelligent transport systems: 5.9-GHz field trials. Proc. IEEE 2011, 99, 1213–1235. [Google Scholar] [CrossRef]
- Wan, J.; Lopez, A.B.; Al Faruque, M.A. Exploiting wireless channel randomness to generate keys for automotive cyber-physical system security. In Proceedings of the 2016 ACM/IEEE 7th International Conference on Cyber-Physical Systems (ICCPS), Vienna, Austria, 11–14 April 2016; pp. 1–10. [Google Scholar]
- ETSI, T. 103 257-1 V1. 1.1 (2019-05) Intelligent Transport Systems (ITS). Access Layer. Available online: https://www.etsi.org/deliver/etsi_tr/103200_103299/10325701/01.01.01_60/tr_10325701v010101p.pdf (accessed on 20 October 2022).
- Bernado, L.; Zemen, T.; Tufvesson, F.; Molisch, A.F.; Mecklenbräuker, C.F. Delay and Doppler spreads of nonstationary vehicular channels for safety-relevant scenarios. IEEE Trans. Veh. Technol. 2013, 63, 82–93. [Google Scholar] [CrossRef]
- Tan, I.; Tang, W.; Laberteaux, K.; Bahai, A. Measurement and analysis of wireless channel impairments in DSRC vehicular communications. In Proceedings of the 2008 IEEE International Conference on Communications, Beijing, China, 19–23 May 2008; pp. 4882–4888. [Google Scholar]
- Zemen, T.; Bernadó, L.; Czink, N.; Molisch, A.F. Iterative time-variant channel estimation for 802.11 p using generalized discrete prolate spheroidal sequences. IEEE Trans. Veh. Technol. 2012, 61, 1222–1233. [Google Scholar] [CrossRef]
- Zhuang, Y.; Hua, J.; Wen, H.; Meng, L. An iterative Doppler shift estimation in vehicular communication systems. Procedia Eng. 2012, 29, 4129–4134. [Google Scholar] [CrossRef][Green Version]
- Ghanavati, A.Z.; Pareek, U.; Muhaidat, S.; Lee, D. On the performance of imperfect channel estimation for vehicular ad-hoc networks. In Proceedings of the 2010 IEEE 72nd Vehicular Technology Conference-Fall, Ottawa, ON, Canada, 6–9 September 2010; pp. 1–5. [Google Scholar]
- Sutar, M.B.; Patil, V.S. LS and MMSE estimation with different fading channels for OFDM system. In Proceedings of the 2017 International conference of Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 20–22 April 2017; Volume 1, pp. 740–745. [Google Scholar]
- Kukačka, J.; Golkov, V.; Cremers, D. Regularization for deep learning: A taxonomy. arXiv 2017, arXiv:1710.10686. [Google Scholar]
- Abadi, M.; Barham, P.; Chen, J.; Chen, Z.; Davis, A.; Dean, J.; Devin, M.; Ghemawat, S.; Irving, G.; Isard, M.; et al. Tensorflow: A system for large-scale machine learning. In Proceedings of the 12th USENIX Symposium on Operating Systems Design and Implementation (OSDI 16), Savannah, GA, USA, 2–4 November 2016; pp. 265–283. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Identity mappings in deep residual networks. 2016. arXiv 2016, arXiv:1603.05027. [Google Scholar]
- Chollet, F. Xception: Deep learning with depthwise separable convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1251–1258. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the inception architecture for computer vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2818–2826. [Google Scholar]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A. Inception-v4, inception-resnet and the impact of residual connections on learning. arXiv 2016, arXiv:1602.07261. [Google Scholar] [CrossRef]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely connected convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4700–4708. [Google Scholar]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.C. Mobilenetv2: Inverted residuals and linear bottlenecks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4510–4520. [Google Scholar]
- Elwekeil, M.; Wang, T.; Zhang, S. Deep Learning for Environment Identification in Vehicular Networks. IEEE Wirel. Commun. Lett. 2019, 9, 576–580. [Google Scholar] [CrossRef]
- Dixit, V.V.; Chand, S.; Nair, D.J. Autonomous vehicles: Disengagements, accidents and reaction times. PLoS ONE 2016, 11, e0168054. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Taps | Power [dB] | Delay [ns] | Doppler [Hz] | |
|---|---|---|---|---|
| U-LOS | Tap 1 | 0 | 0 | 0 |
| Tap 2 | −8 | 117 | 236 | |
| Tap 3 | −10 | 183 | −157 | |
| Tap 4 | −15 | 333 | 492 | |
| U-NLOS | Tap 1 | 0 | 0 | 0 |
| Tap 2 | −3 | 267 | 295 | |
| Tap 3 | −4 | 400 | −98 | |
| Tap 4 | −10 | 533 | 591 | |
| R-LOS | Tap 1 | 0 | 0 | 0 |
| Tap 2 | −14 | 83 | 492 | |
| Tap 3 | −17 | 183 | −295 | |
| H-LOS | Tap 1 | 0 | 0 | 0 |
| Tap 2 | −10 | 100 | 689 | |
| Tap 3 | −15 | 167 | −492 | |
| Tap 4 | −20 | 500 | 886 | |
| H-NLOS | Tap 1 | 0 | 0 | 0 |
| Tap 2 | −2 | 200 | 689 | |
| Tap 3 | −5 | 433 | −492 | |
| Tap 4 | −7 | 700 | 886 |
| Vehicular Environment | Label | Speed Limits |
|---|---|---|
| Highway NLOS | 0 | |
| Highway LOS | 1 | |
| Rural LOS | 2 | |
| Urban LOS | 3 | |
| Urban NLOS | 4 |
| Configuration | Accuracy |
|---|---|
| Magnitude | 92.22% |
| Angle | 91.78% |
| 2-Channel | 93.42% |
| Approach | Accuracy (%) | Prediction Time (s) |
|---|---|---|
| Proposed CNN | 93.42 | 51.33 |
| ANN | 86.16 | 23.11 |
| RF | 68.34 | 25.71 |
| K-NN | 63.18 | 7180 |
| GBN | 20.62 | 4.11 |
| SVM | 31.38 | 10499 |
| Configuration | Accuracy |
|---|---|
| Magnitude | 90.63% |
| Angle | 91.50% |
| 2-Channel | 96.48% |
| Approach | Accuracy (%) | Prediction Time () |
|---|---|---|
| Proposed CNN | 96.48 | 39.56 |
| ANN | 85.64 | 21.11 |
| RF | 67.77 | 24.04 |
| K-NN | 59.26 | 8999 |
| GNB | 27.06 | 4.38 |
| SVM | 32.33 | 15756 |
| Architecture | H-NLOS Acc (%) | H-LOS Acc (%) | R-LOS Acc (%) | U-LOS Acc (%) | U-NLOS Acc (%) | Acc (%) | Prediction Time () |
|---|---|---|---|---|---|---|---|
| Our Model | 99.9 | 95.2 | 92.7 | 97.4 | 97.2 | 96.48 | 39.56 |
| ResNet50 | 98.1 | 88.2 | 77.8 | 90.1 | 93.5 | 89.54 | 672 |
| Xception | 97.8 | 91.7 | 81.4 | 91.2 | 94.5 | 91.32 | 794 |
| InceptionV3 | 99.1 | 79.8 | 86.9 | 96.1 | 93.9 | 91.08 | 683 |
| Inception ResNetV2 | 98.5 | 89.1 | 80 | 86.5 | 95.8 | 89.98 | 1621 |
| DenseNet201 | 98.5 | 92.7 | 85.7 | 91.2 | 96.6 | 92.94 | 1349 |
| MobileNetV2 | 96.8 | 77.8 | 96 | 58.2 | 65.5 | 78.86 | 318 |
| DCNN [37] | 98.9 | 96.9 | 94.3 | 95.8 | 99.2 | 97.02 | 125 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ribouh, S.; Sadli, R.; Elhillali, Y.; Rivenq, A.; Hadid, A. Vehicular Environment Identification Based on Channel State Information and Deep Learning. Sensors 2022, 22, 9018. https://doi.org/10.3390/s22229018
Ribouh S, Sadli R, Elhillali Y, Rivenq A, Hadid A. Vehicular Environment Identification Based on Channel State Information and Deep Learning. Sensors. 2022; 22(22):9018. https://doi.org/10.3390/s22229018
Chicago/Turabian StyleRibouh, Soheyb, Rahmad Sadli, Yassin Elhillali, Atika Rivenq, and Abdenour Hadid. 2022. "Vehicular Environment Identification Based on Channel State Information and Deep Learning" Sensors 22, no. 22: 9018. https://doi.org/10.3390/s22229018
APA StyleRibouh, S., Sadli, R., Elhillali, Y., Rivenq, A., & Hadid, A. (2022). Vehicular Environment Identification Based on Channel State Information and Deep Learning. Sensors, 22(22), 9018. https://doi.org/10.3390/s22229018