
Effects of Dynamic IMU-to-Segment Misalignment Error on 3-DOF Knee Angle Estimation in Walking and Running


Abstract
1. Introduction
2. Methods and Equipment
2.1. Methods
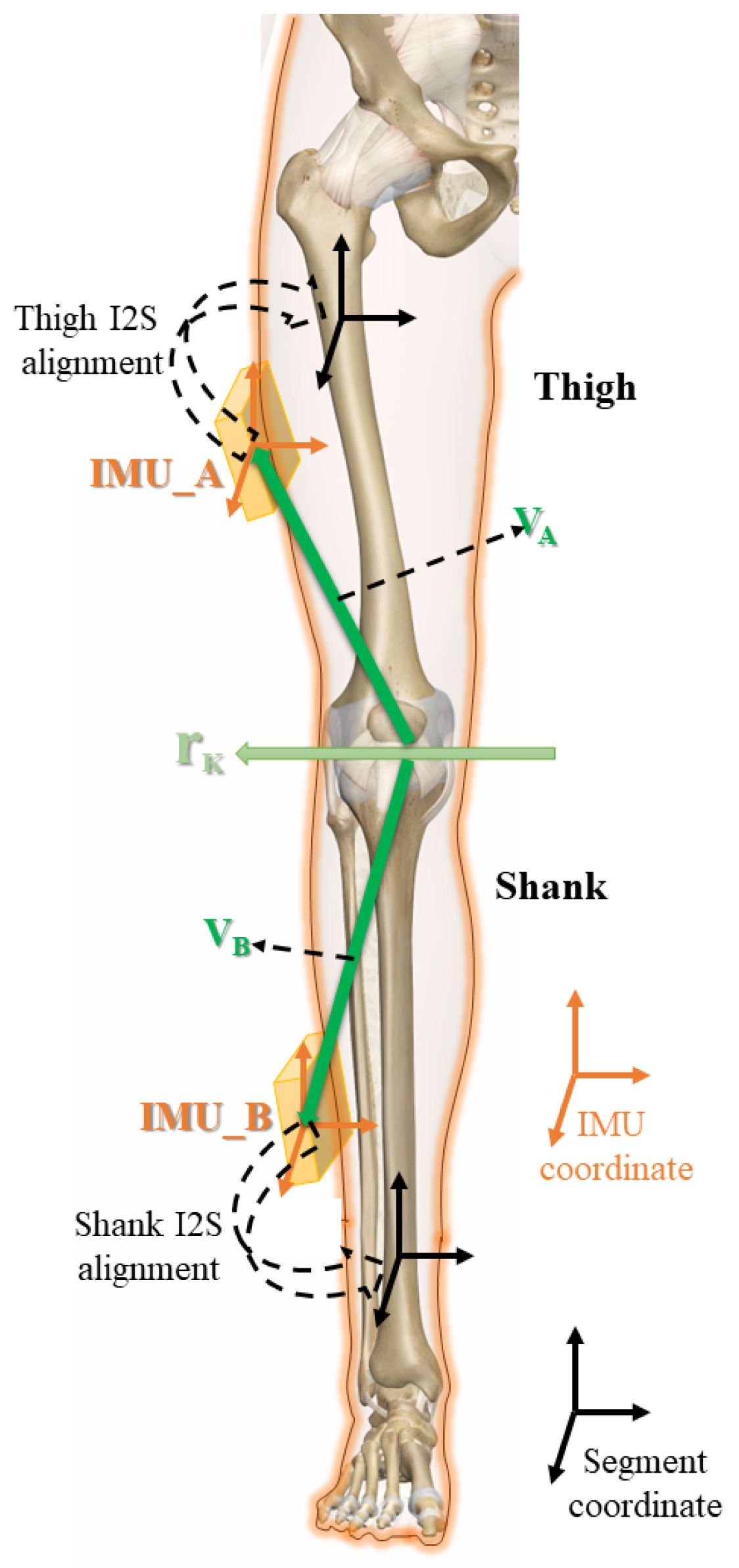
2.1.1. IMU-to-Segment Alignment Based on Joint Constraints
2.1.2. Quaternion-Based 3-DOF Knee Angle Estimation
2.1.3. Adding Errors to the Dynamic I2S Alignment Parameter
2.1.4. Data Analysis
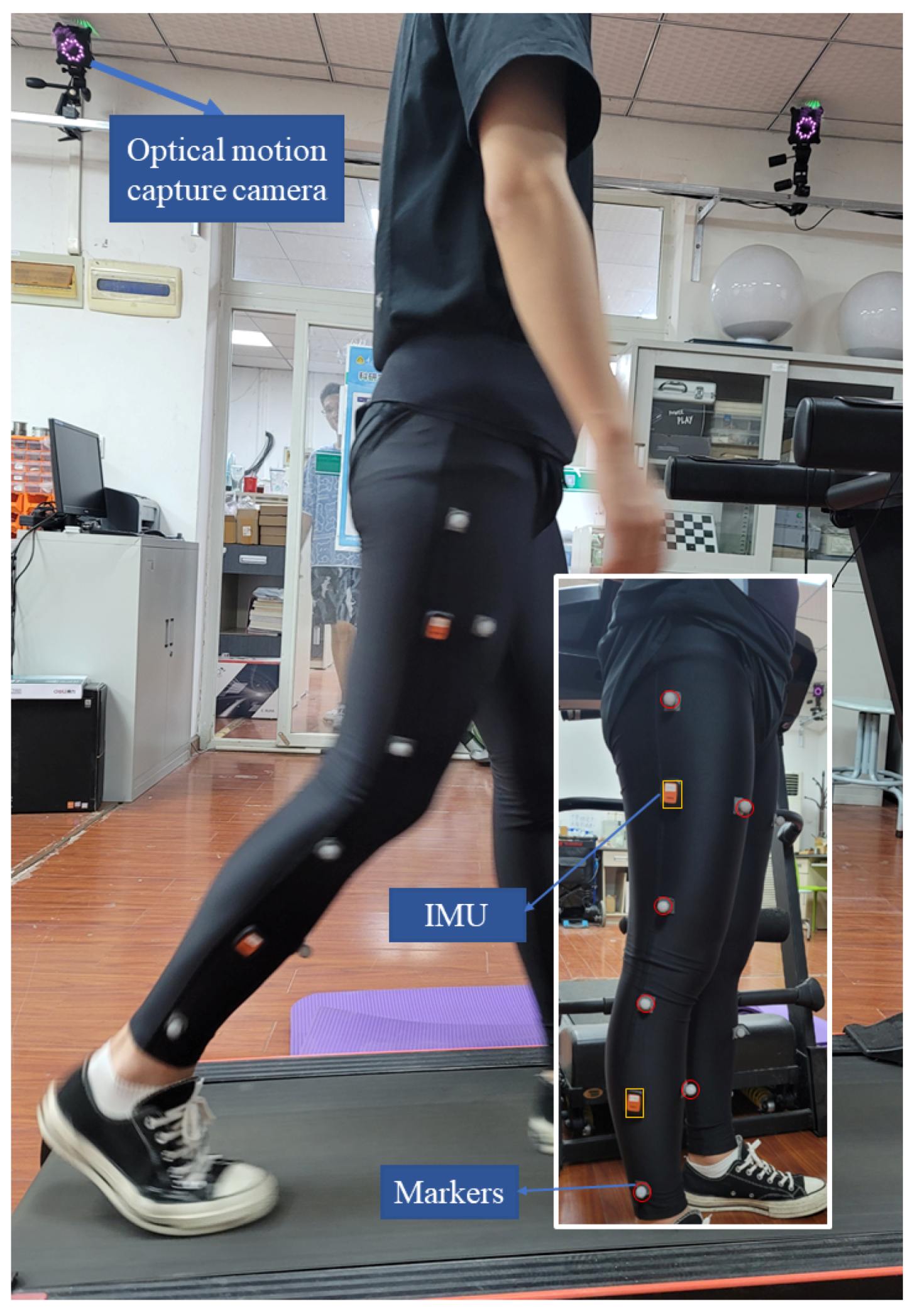
2.2. Measurement Equipment
2.3. Participants
3. Results
3.1. Joint Constraint Optimization
3.2. Knee Joint Angle Estimation Results
3.2.1. The Effects of Dynamic I2S Misalignment Error in Different Motions
3.2.2. The 3-DOF Knee Angle Estimation Algorithm
4. Discussion
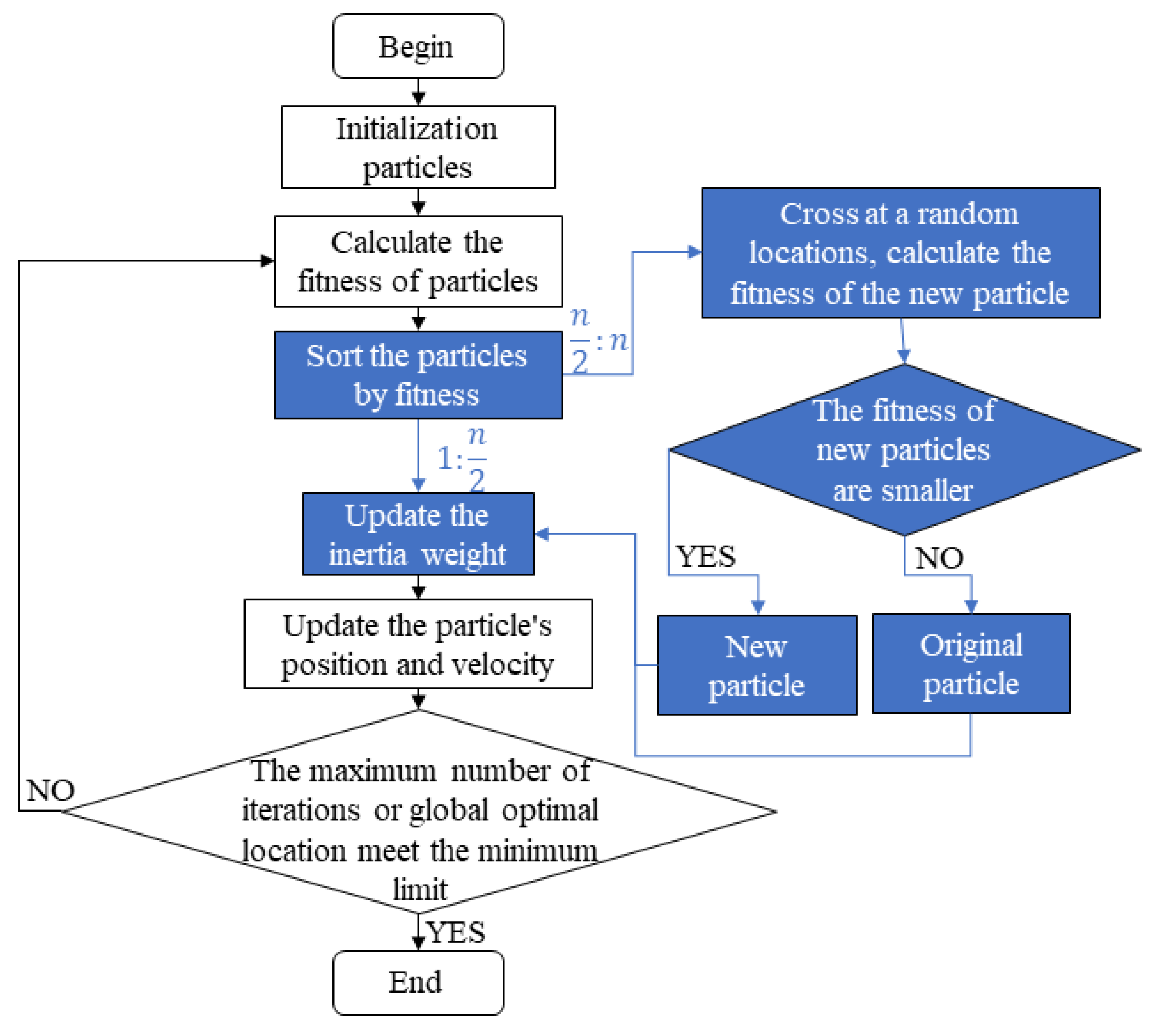
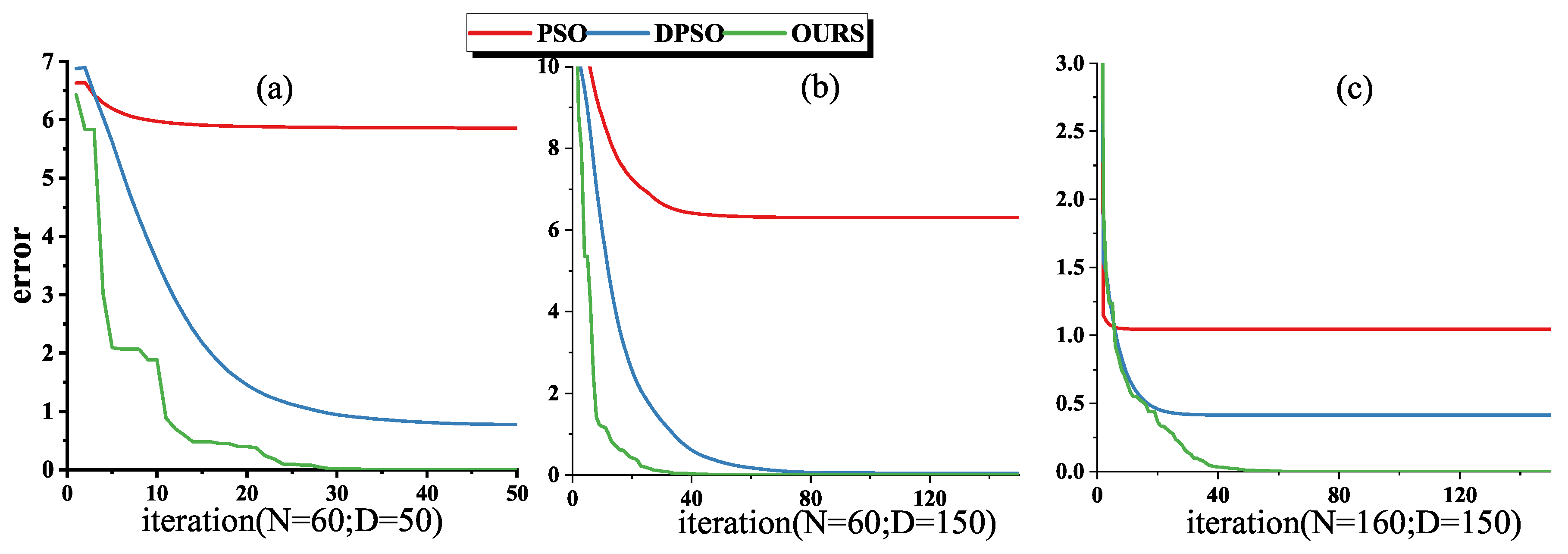
4.1. Joint Constraint Optimization Algorithm
4.2. The Effects of Dynamic I2S Misalignment Error in Different Motions
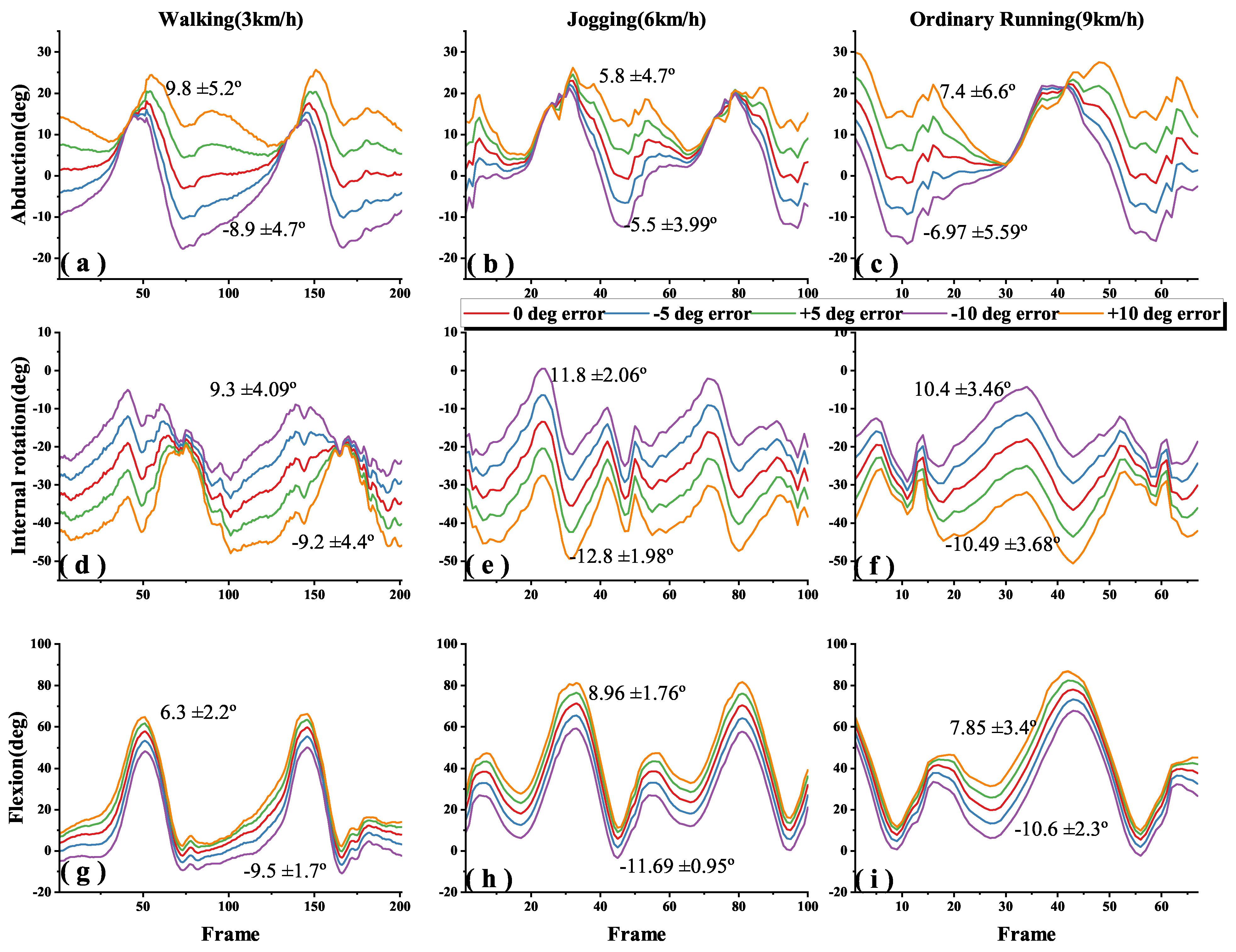
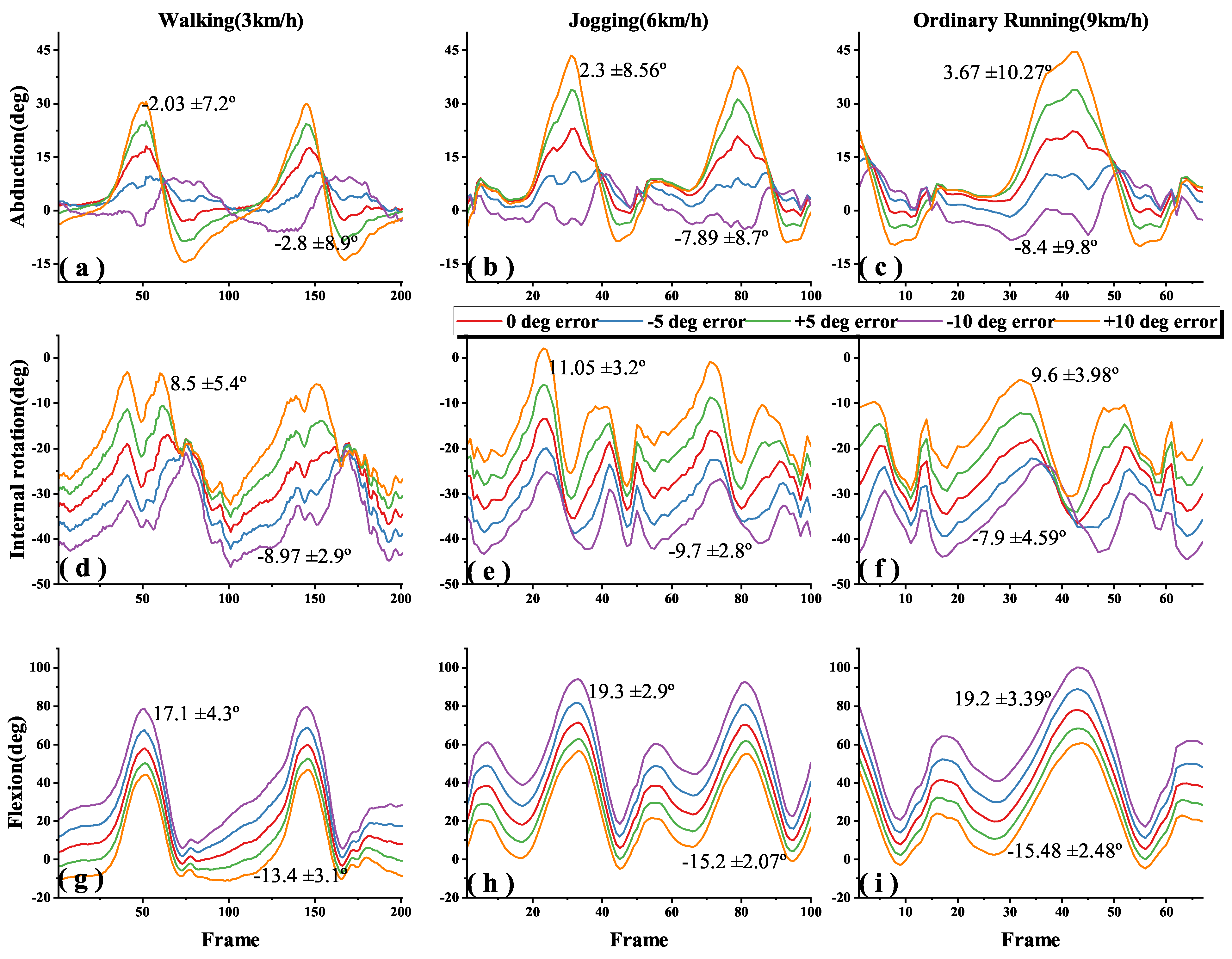
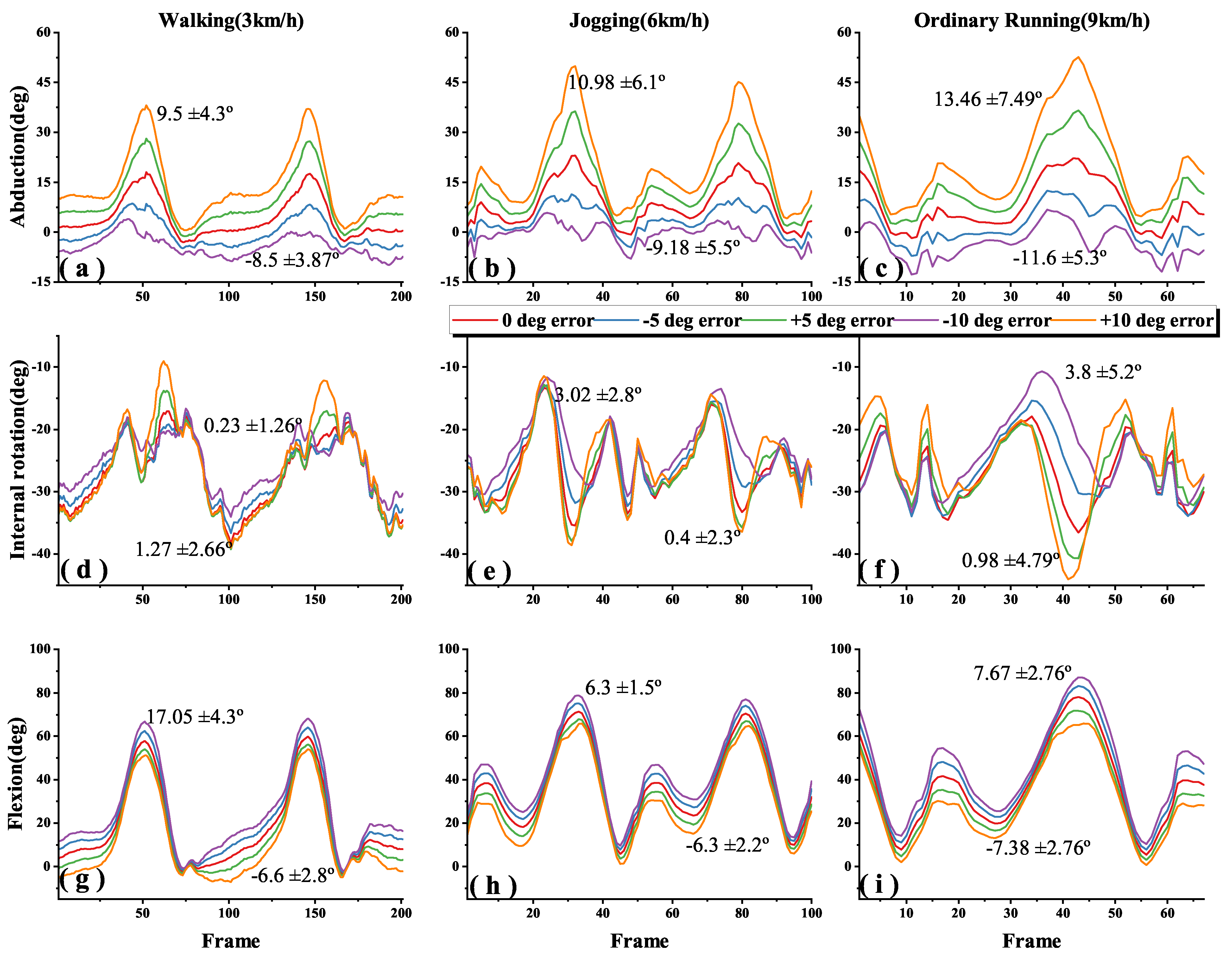
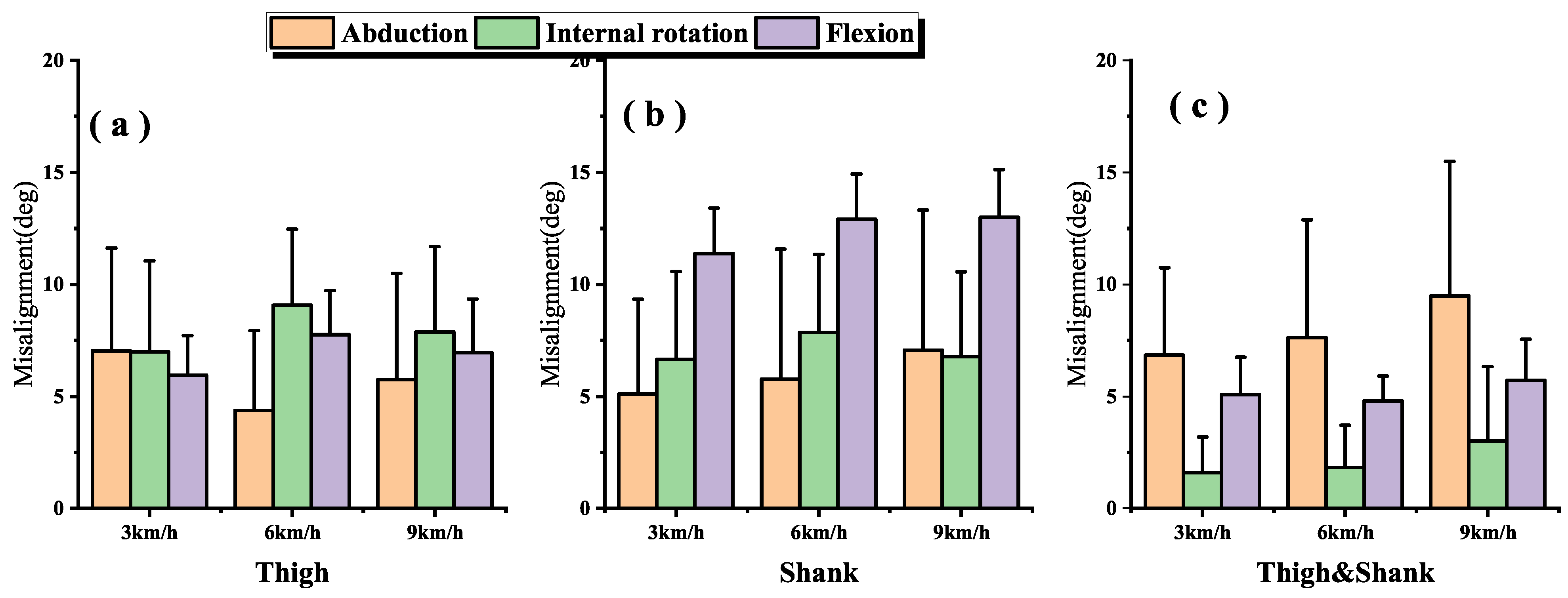
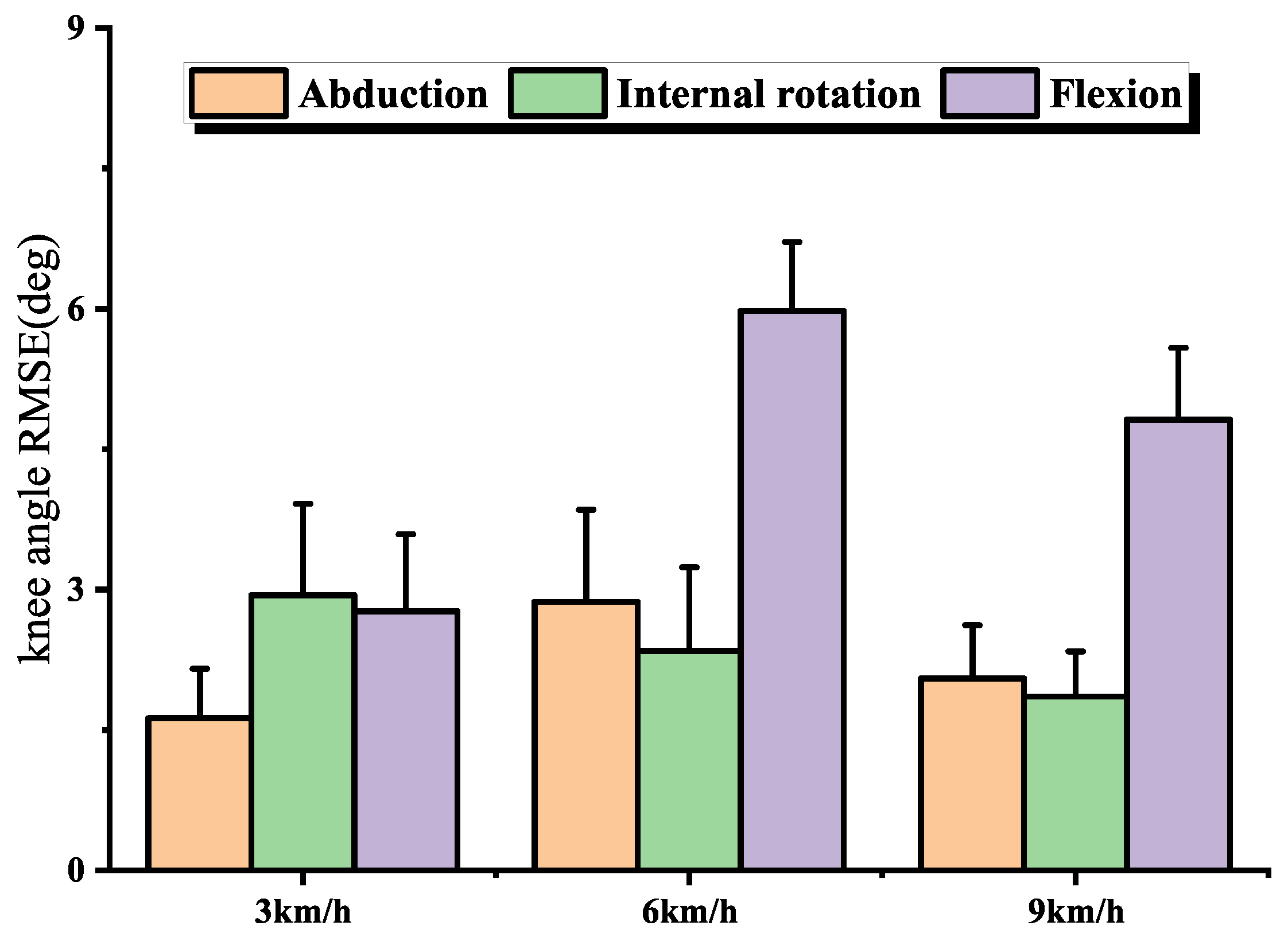
- AbductionIt is found in Figure 8a that the sensitivity of the abduction angle estimation to IMU to thigh misalignment error decreased when switching from walking to jogging; when speeding up from jogging to ordinary running, the sensitivity increased slightly, but still lower than walking. This is due to the fact that the human body stands for a shorter period in running than walking, which increases muscle activity and viscoelastic behavior of the soft tissues, and the increased muscle activity makes the abduction of the knee somewhat limited [21,26,27].
- Internal rotationComparing Figure 8a,b, it is found that the effect of I2S misalignment error on the estimation of knee internal rotation becomes larger after switching from walking to running; while in the same motions, estimation of knee internal rotation is more sensitive to the IMU to thigh misalignment error than the IMU to shank misalignment error. This is due to the more significant internal rotation of the tibia during running than during walking [28]. During movements, the shank is affected by larger ground reaction forces, which makes the moment of the thigh greater and increases the internal rotation of the tibia [29], then the IMU to thigh misalignment error shows the greatest effect on the estimation of the internal rotation angle of the knee.
- FlexionIt is found in Figure 8 that after introducing the I2S misalignment error, the mean value of flexion absolute error is larger but the SD is the smallest in the 3-DOF joint angle estimation. The large absolute error means are due to the fact that during walking and running, the knee joint moves mainly in the sagittal plane and the ROM of flexion is much greater than abduction and internal rotation [20,21,30]. However, the error brought by I2S misalignment error to flexion is mainly an approximate constant, which can be eliminated by subtracting the mean in the alignment phase [25], which explains why the effect brought by I2S misalignment error to flexion angle has the highest stability as well as the smallest SD. The IMU to shank misalignment error has the greatest effect on the estimation of the knee flexion angle, which is caused by the knee angle and is defined by the shank rotation relative to the thigh.
4.3. Joint Angle Estimation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- van Mechelen, W. Running Injuries: A Review of the Epidemiological Literature. Sport. Med. Int. J. Appl. Med. Sci. Sport Exerc. 1992, 14, 320–335. [Google Scholar] [CrossRef] [PubMed]
- Landry, S.C.; McKean, K.A.; Hubley-Kozey, C.L.; Stanish, W.D.; Deluzio, K.J. Knee biomechanics of moderate OA patients measured during gait at a self-selected and fast walking speed. J. Biomech. 2007, 40, 1754–1761. [Google Scholar] [CrossRef] [PubMed]
- Costello, K.E.; Eigenbrot, S.; Geronimo, A.; Guermazi, A.; Felson, D.T.; Richards, J.; Kumar, D. Quantifying varus thrust in knee osteoarthritis using wearable inertial sensors: A proof of concept. Clin. Biomech. 2020, 80, 105232. [Google Scholar] [CrossRef]
- Robert-Lachaine, X.; Mecheri, H.; Muller, A.; Larue, C.; Plamondon, A. Validation of a low-cost inertial motion capture system for whole-body motion analysis. J. Biomech. 2020, 99, 109520. [Google Scholar] [CrossRef] [PubMed]
- Vitali, R.V.; Perkins, N.C. Determining anatomical frames via inertial motion capture: A survey of methods. J. Biomech. 2020, 106, 109832. [Google Scholar] [CrossRef] [PubMed]
- Palermo, E.; Rossi, S.; Marini, F.; Patanè, F.; Cappa, P. Experimental evaluation of accuracy and repeatability of a novel body-to-sensor calibration procedure for inertial sensor-based gait analysis. Meas. J. Int. Meas. Confed. 2014, 52, 145–155. [Google Scholar] [CrossRef]
- Brennan, A.; Zhang, J.; Deluzio, K.; Li, Q. Quantification of inertial sensor-based 3D joint angle measurement accuracy using an instrumented gimbal. Gait Posture 2011, 34, 320–323. [Google Scholar] [CrossRef] [PubMed]
- Nazarahari, M.; Rouhani, H. Semi-Automatic Sensor-to-Body Calibration of Inertial Sensors on Lower Limb Using Gait Recording. IEEE Sens. J. 2019, 19, 12465–12474. [Google Scholar] [CrossRef]
- Wu, G.; Cavanagh, P.R. ISB recommendations for standardization in the reporting of kinematic data. J. Biomech. 1995, 28, 1257–1261. [Google Scholar] [CrossRef]
- Ahmadi, A.; Destelle, F.; Unzueta, L.; Monaghan, D.S.; Linaza, M.T.; Moran, K.; O’Connor, N.E. 3D human gait reconstruction and monitoring using body-worn inertial sensors and kinematic modeling. IEEE Sens. J. 2016, 16, 8823–8831. [Google Scholar] [CrossRef]
- Fasel, B.; Spörri, J.; Schütz, P.; Lorenzetti, S.; Aminian, K. An inertial sensor-based method for estimating the athlete’s relative joint center positions and center of mass kinematics in alpine ski racing. Front. Physiol. 2017, 8, 8823–8831. [Google Scholar] [CrossRef] [PubMed]
- Picerno, P.; Cereatti, A.; Cappozzo, A. Joint kinematics estimate using wearable inertial and magnetic sensing modules. Gait Posture 2008, 28, 588–595. [Google Scholar] [CrossRef] [PubMed]
- Seel, T.; Raisch, J.; Schauer, T. IMU-based joint angle measurement for gait analysis. Sensors 2014, 14, 6891–6909. [Google Scholar] [CrossRef] [PubMed]
- Robert-Lachaine, X.; Mecheri, H.; Larue, C.; Plamondon, A. Accuracy and repeatability of single-pose calibration of inertial measurement units for whole-body motion analysis. Gait Posture 2017, 54, 80–86. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.T.; Novak, A.C.; Brouwer, B.; Li, Q. Concurrent validation of Xsens MVN measurement of lower limb joint angular kinematics. Physiol. Meas. 2013, 34, N63. [Google Scholar] [CrossRef]
- Brennan, A.; Deluzio, K.; Li, Q. Assessment of anatomical frame variation effect on joint angles: A linear perturbation approach. J. Biomech. 2011, 44, 2838–2842. [Google Scholar] [CrossRef] [PubMed]
- Fan, B.; Li, Q.; Tan, T.; Kang, P.; Shull, P.B. Effects of IMU Sensor-to-Segment Misalignment and Orientation Error on 3-D Knee Joint Angle Estimation. IEEE Sens. J. 2022, 22, 2543–2552. [Google Scholar] [CrossRef]
- Lelas, J.L.; Merriman, G.J.; Riley, P.O.; Kerrigan, D.C. Predicting peak kinematic and kinetic parameters from gait speed. Gait Posture 2003, 17, 106–112. [Google Scholar] [CrossRef]
- de David, A.C.; Carpes, F.P.; Stefanyshyn, D. Effects of changing speed on knee and ankle joint load during walking and running. J. Sport. Sci. 2015, 33, 391–397. [Google Scholar] [CrossRef] [PubMed]
- Bejek, Z.; Paróczai, R.; Illyés, Á.; Kiss, R.M. The influence of walking speed on gait parameters in healthy people and in patients with osteoarthritis. Knee Surg. Sport. Traumatol. Arthrosc. 2006, 14, 612–622. [Google Scholar] [CrossRef] [PubMed]
- Liu, R.; Qian, D.; Chen, Y.; Zou, J.; Zheng, S.; Bai, B.; Lin, Z.; Zhang, Y.; Chen, Y. Investigation of normal knees kinematics in walking and running at different speeds using a portable motion analysis system. Sport. Biomech. 2021, 1–14. [Google Scholar] [CrossRef]
- Olsson, F.; Kok, M.; Seel, T.; Halvorsen, K. Robust plug-and-play joint axis estimation using inertial sensors. Sensors 2020, 20, 3534. [Google Scholar] [CrossRef]
- Hu, Q.; Liu, L.; Mei, F.; Yang, C. Joint constraints based dynamic calibration of imu position on lower limbs in imu-mocap. Sensors 2021, 21, 7161. [Google Scholar] [CrossRef] [PubMed]
- Akenine-Moller, T.; Haines, E.N.H. Real-Time Rendering, 3rd ed.; AK Peters Ltd.: Natick, MA, USA, 2008; pp. 75–77. [Google Scholar]
- Cooper, G.; Sheret, I.; McMillian, L.; Siliverdis, K.; Sha, N.; Hodgins, D.; Kenney, L.; Howard, D. Inertial sensor-based knee flexion/extension angle estimation. J. Biomech. 2009, 42, 2678–2685. [Google Scholar] [CrossRef]
- Fu, F.H.; Feldman, A. The biomechanics of running: Practical considerations. Tech. Orthop. 1990, 5, 8–14. [Google Scholar] [CrossRef]
- Zhang, S.; Pan, J.; Li, L. Non-linear changes of lower extremity kinetics prior to gait transition. J. Biomech. 2018, 77, 48–54. [Google Scholar] [CrossRef] [PubMed]
- Sinclair, J.; Richards, J.; Taylor, P.J.; Edmundson, C.J.; Brooks, D.; Hobbs, S.J. Three-dimensional kinematic comparison of treadmill and overground running. Sport. Biomech. 2013, 12, 272–282. [Google Scholar] [CrossRef]
- Kwon, J.W.; Son, S.M.; Lee, N.K. Changes of kinematic parameters of lower extremities with gait speed: A 3D motion analysis study. J. Phys. Ther. Sci. 2015, 27, 477–479. [Google Scholar] [CrossRef] [PubMed]
- Mannering, N.; Young, T.; Spelman, T.; Choong, P.F. Three-dimensional knee kinematic analysis during treadmill gait: Slow imposed speed versus normal self-selected speed. Bone Jt. Res. 2017, 6, 514–521. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motions | 3-DOF Knee Angle | Max (°) | Min (°) | ROM (°) |
|---|---|---|---|---|
| Walking (3 km/h) | abduction | 18.08898 | −3.00719 | 21.09617 |
| internal rotation | −17.0804 | −38.3691 | 21.28875 | |
| flexion | 59.85131 | −3.28834 | 63.13965 | |
| Jogging (6 km/h) | abduction | 23.32207 | −1.75181 | 25.07388 |
| internal rotation | −13.3855 | −35.9901 | 22.60462 | |
| flexion | 72.80989 | 5.867394 | 66.9425 | |
| Ordinary Running (9 km/h) | abduction | 22.24302 | −2.22884 | 24.47186 |
| internal rotation | −17.9308 | −37.9682 | 20.03737 | |
| flexion | 80.15724 | 5.39035 | 74.76689 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, C.; Yang, Y.; Mao, H.; Yang, D.; Wang, W. Effects of Dynamic IMU-to-Segment Misalignment Error on 3-DOF Knee Angle Estimation in Walking and Running. Sensors 2022, 22, 9009. https://doi.org/10.3390/s22229009
Jiang C, Yang Y, Mao H, Yang D, Wang W. Effects of Dynamic IMU-to-Segment Misalignment Error on 3-DOF Knee Angle Estimation in Walking and Running. Sensors. 2022; 22(22):9009. https://doi.org/10.3390/s22229009
Chicago/Turabian StyleJiang, Chao, Yan Yang, Huayun Mao, Dewei Yang, and Wei Wang. 2022. "Effects of Dynamic IMU-to-Segment Misalignment Error on 3-DOF Knee Angle Estimation in Walking and Running" Sensors 22, no. 22: 9009. https://doi.org/10.3390/s22229009
APA StyleJiang, C., Yang, Y., Mao, H., Yang, D., & Wang, W. (2022). Effects of Dynamic IMU-to-Segment Misalignment Error on 3-DOF Knee Angle Estimation in Walking and Running. Sensors, 22(22), 9009. https://doi.org/10.3390/s22229009