
Problem Characteristics and Dynamic Search Balance-Based Artificial Bee Colony for the Optimization of Two-Tiered WSN Lifetime with Relay Nodes Deployment


Abstract
:1. Introduction
- The dimensional characteristics of the problem are incorporated into the search formula of the ABC. This enables the algorithm to adjust the search step according to the dimensionality of the problem, improving the global search capability of the algorithm in a targeted manner.
- The adaptation degree of each individual in the operation of the population intelligence algorithm is integrated into the search process of the algorithm. This helps the algorithm to adjust the speed of local convergence according to the adaptation degree and strengthens its local convergence ability.
- The dynamic search balance strategy is used to replace the scout bee phase in traditional ABC to further reduce the algorithm parameters and improve the ease of using the algorithm.
- Based on the proposed two-layer WSN backbone network algorithm, the problem of deploying different numbers of RNs under different scenarios is studied and a general deployment method for lifetime optimization is obtained.
2. Relay Node Deployment Problem for TT-WSN
2.1. Network Model
2.2. Energy Consumption Model
2.3. Lifetime Definition
3. Implementation of pdABC for TT-WSN Relay Node Deployment
3.1. Overview of ABC
3.2. Introduction of pdABC Algorithm
3.2.1. Search Equation Based on Problem Dimension and Fitness
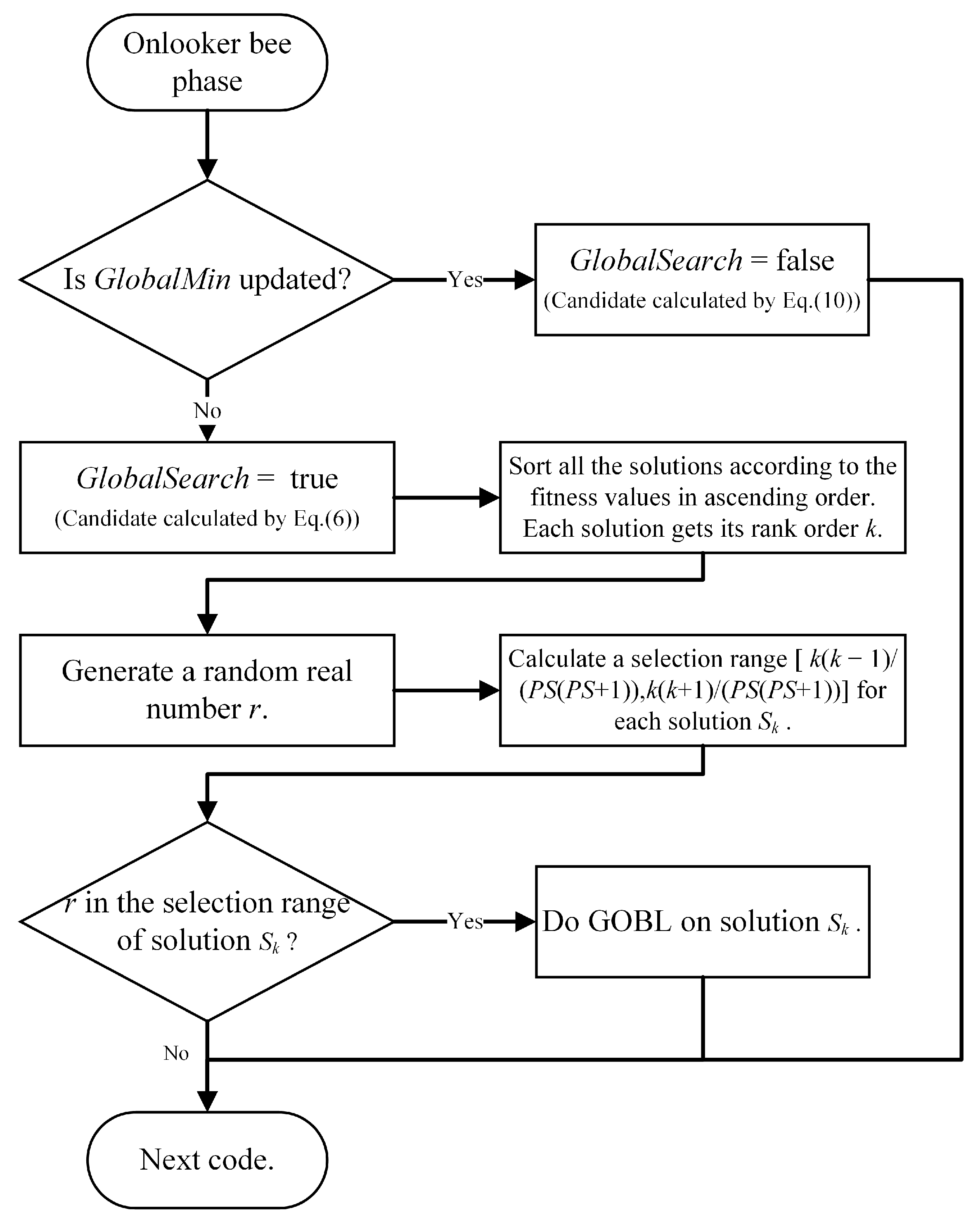
3.2.2. Dynamic Search Balance Strategy
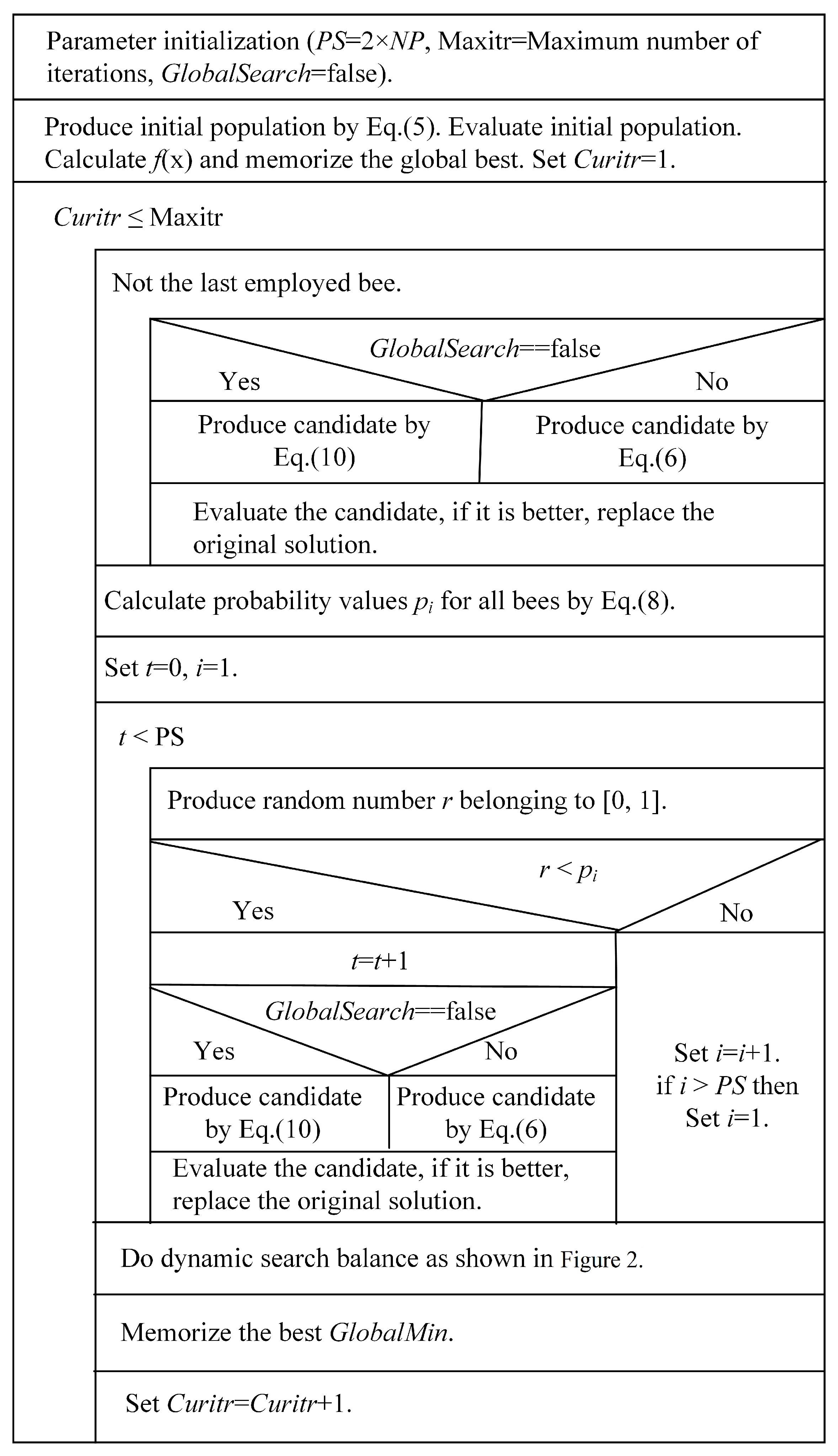
3.3. The Proposed Algorithm
3.4. Introduction of pdABC into TT-WSN Relay Node Deployment
3.4.1. Individual Representation, Initialization, and Fitness Value Assignment
3.4.2. Feasible Solution Formation
4. Numerical Experiments
4.1. Configuration of Network Parameters
4.1.1. Experimentsal Scenario
4.1.2. Network Model and Algorithm Configurations
4.2. Relay Node Deployment Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Amutha, J.; Sharma, S.; Nagar, J. WSN Strategies Based on Sensors, Deployment, Sensing Models, Coverage and Energy Efficiency: Review, Approaches and Open Issues. Wirel. Pers. Commun. 2020, 111, 1089–1115. [Google Scholar] [CrossRef]
- Dinh, N.T.; Kim, Y. Auto-configuration in wireless sensor networks: A review. Sensors 2019, 19, 4281. [Google Scholar] [CrossRef] [Green Version]
- Sefati, S.; Abdi, M.; Ghaffari, A. Cluster-based data transmission scheme in wireless sensor networks using black hole and ant colony algorithms. Int. J. Commun. Syst. 2021, 34, e4768. [Google Scholar] [CrossRef]
- Lanza-Gutierrez, J.M.; Gomez-Pulido, J.A. Studying the multiobjective variable neighbourhood search algorithm when solving the relay node placement problem in Wireless Sensor Networks. Soft Comput. 2016, 20, 67–86. [Google Scholar] [CrossRef]
- Zhou, C.; Mazumder, A.; Das, A.; Basu, K.; Matin-Moghaddam, N.; Mehrani, S.; Sen, A. Relay node placement under budget constraint. In Proceedings of the 19th International Conference on Distributed Computing and Networking, Varanasi, India, 4–7 January 2018. [Google Scholar]
- Cheng, X.Z.; Narahari, B.; Simha, R.; Cheng, M.X.; Liu, D. Strong minimum energy topology in wireless sensor networks: NP-completeness and heuristics. IEEE Trans. Mob. Comput. 2003, 2, 248–256. [Google Scholar] [CrossRef]
- Misra, S.; Majd, N.E.; Huang, H. Constrained relay node placement in energy harvesting wireless sensor networks. In Proceedings of the IEEE 8th International Conference on Mobile Adhoc and Sensor Systems (MASS), Valencia, Spain, 17–22 October 2011; pp. 25–34. [Google Scholar]
- Misra, S.; Majd, N.E.; Huang, H. Approximation Algorithms for Constrained Relay Node Placement in Energy Harvesting Wireless Sensor Networks. IEEE Trans. Comput. 2014, 63, 2933–2947. [Google Scholar] [CrossRef]
- Perez, A.J.; Labrador, M.; Wightman, P.M. A multiobjective approach to the relay placement problem in wsns. In Proceedings of the of Wireless Communications and Networking Conference (WCNC), Cancun, Mexico, 28–31 March 2011; pp. 475–480. [Google Scholar]
- Nigam, A.; Agarwal, Y.K. Optimal relay node placement in delay constrained wireless sensor network design. Eur. J. Oper. Res. 2014, 233, 220–233. [Google Scholar] [CrossRef]
- Truong, T.T.; Brown, K.N.; Sreenan, C.J. Multi-objective hierarchical algorithms for restoring Wireless Sensor Network connectivity in known environments. Ad Hoc Netw. 2015, 33, 190–208. [Google Scholar] [CrossRef]
- Ozkan, O.; Ermis, M. Nature-inspired relay node placement heuristics for wireless sensor networks. J. Intell. Fuzzy Syst. 2015, 28, 2801–2809. [Google Scholar] [CrossRef]
- Peiravi, A.; Mashhadi, H.R.; Javadi, S.H. An optimal energy-efficient clustering method in wireless sensor networks using multi-objective genetic algorithm. Int. J. Commun. Syst. 2013, 26, 114–126. [Google Scholar] [CrossRef]
- Azharuddin, M.; Jana, P.K. A GA-based approach for fault tolerant relay node placement in wireless sensor networks. In Proceedings of the Third International Conference on Computer, Communication, Control and Information Technology (C3IT), Hooghly, India, 7–8 February 2015; pp. 1–6. [Google Scholar]
- Chen, C.C.; Chang, C.Y.; Chen, P.Y. Linear Time Approximation Algorithms for the Relay Node Placement Problem in Wireless Sensor Networks with Hexagon Tessellation. J. Sens. 2015, 2015, 565983. [Google Scholar] [CrossRef] [Green Version]
- Hashim, H.A.; Ayinde, B.O.; Abido, M.A. Optimal placement of relay nodes in wireless sensor network using Artificial Bee Colony algorithm. J. Netw. Comput. Appl. 2016, 64, 239–248. [Google Scholar] [CrossRef] [Green Version]
- Yang, D.; Misra, S.; Fang, X.; Xue, G.; Zhang, J. Two-Tiered Constrained Relay Node Placement in Wireless Sensor Networks: Computational Complexity and Efficient Approximations. IEEE Trans. Mob. Comput. 2012, 11, 1399–1411. [Google Scholar] [CrossRef]
- Ma, C.; Liang, W.; Zheng, M. PSH: A Pruning and Substitution Based Heuristic Algorithm for Relay Node Placement in Two-Tiered Wireless Sensor Networks. Wirel. Pers. Commun. 2017, 94, 1491–1510. [Google Scholar] [CrossRef]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization; Technical Report-tr06; Erciyes University, Engineering Faculty, Computer Engineering Department: Kayseri, Turkey, 2005. [Google Scholar]
- Kaya, E.; Gorkemli, B.; Akay, B.; Karaboga, D. A review on the studies employing Artificial Bee Colony algorithm to solve combinatorial optimization problems. Eng. Appl. Artif. Intell. 2022, 115, 105311. [Google Scholar]
- Wang, L.; Han, S. The improved Artificial Bee Colony algorithm for mixed additive and multiplicative random error model and the bootstrap method for its precision estimation. Geod. Geodyn. 2022, in press. [CrossRef]
- Fanding, D. A Faster Algorithm for Shortest-Ptath–SPFA. J. Southwest Jiaotong Univ. 1994, 29, 207–212. [Google Scholar]
- Ye, W.; Heidemann, J.; Estrin, D. An energy-efficient MAC protocol for wireless sensor networks. In Proceedings of the Twenty-First Annual Joint Conference of the IEEE Computer and Communications Societies, New York, NY, USA, 23–27 June 2002; pp. 1567–1576. [Google Scholar]
- Konstantinidis, A.; Yang, K.; Zhang, Q. An evolutionary algorithm to a multi-objective deployment and power assignment problem in wireless sensor networks. In Proceedings of the IEEE Global Telecommunications Conference, New Orleans, LA, USA, 30 November–4 December 2008; pp. 1–6. [Google Scholar]
- Tsai, C.-W.; Hong, T.-P.; Shiu, G.-N. Metaheuristics for the Lifetime of WSN: A Review. IEEE Sens. J. 2016, 16, 2812–2831. [Google Scholar] [CrossRef]
- Jadon, S.S.; Bansal, J.C.; Tiwari, R.; Sharma, H. Artificial Bee Colony algorithm with global and local neighborhoods. Int. J. Syst. Assur. Eng. Manag. 2018, 9, 589–601. [Google Scholar] [CrossRef]
- Zhu, G.; Kwong, S. Gbest-guided Artificial Bee Colony algorithm for numerical function optimization. Appl. Math. Comput. 2010, 217, 3166–3173. [Google Scholar] [CrossRef]
- Gao, W.F.; Liu, S.Y.; Huang, L.L. A Novel Artificial Bee Colony Algorithm Based on Modified Search Equation and Orthogonal Learning. IEEE Trans. Cybern. 2013, 43, 1011–1024. [Google Scholar]
- Jadon, S.S.; Bansal, J.C.; Tiwari, R.; Sharma, H. Accelerating Artificial Bee Colony algorithm with adaptive local search. Memetic Comput. 2015, 7, 215–230. [Google Scholar] [CrossRef]
- Zhou, X.Y.; Wu, Z.J.; Wang, H.; Rahnamayan, S. Gaussian bare-bones Artificial Bee Colony algorithm. Soft Comput. 2016, 20, 907–924. [Google Scholar] [CrossRef]
- Konstantinidis, A.; Yang, K. Multi-objective k-connected deployment and power assignment in wsns using a problem-specific constrained evolutionary algorithm based on decomposition. Comput. Commun. 2011, 34, 83–98. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A Sine Cosine Algorithm for solving optimization problems. Knowl.-Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | Parameters | Value Selected | Range |
|---|---|---|---|
| GA | Mutation | 0.2 | |
| Crossover | 0.95 | ||
| SA | 4 | ||
| 0.85 | |||
| dpABC | C | 1.5 |
| Algorithms | 6 RNs (100 × 100) | 22 RNs (200 × 200) | ||
|---|---|---|---|---|
| Ave.NL | Ave.CT | Ave.NL | Ave.CT | |
| WOA | 1955 | 273 | 783 | 326 |
| SCA | 1824 | 358 | 681 | 378 |
| GWO | 1871 | 312 | 724 | 348 |
| dpABC | 1934 | 232 | 777 | 280 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, W.; Li, X.; Zeng, Z.; Luo, M. Problem Characteristics and Dynamic Search Balance-Based Artificial Bee Colony for the Optimization of Two-Tiered WSN Lifetime with Relay Nodes Deployment. Sensors 2022, 22, 8916. https://doi.org/10.3390/s22228916
Yu W, Li X, Zeng Z, Luo M. Problem Characteristics and Dynamic Search Balance-Based Artificial Bee Colony for the Optimization of Two-Tiered WSN Lifetime with Relay Nodes Deployment. Sensors. 2022; 22(22):8916. https://doi.org/10.3390/s22228916
Chicago/Turabian StyleYu, Wenjie, Xiangmei Li, Zhi Zeng, and Miao Luo. 2022. "Problem Characteristics and Dynamic Search Balance-Based Artificial Bee Colony for the Optimization of Two-Tiered WSN Lifetime with Relay Nodes Deployment" Sensors 22, no. 22: 8916. https://doi.org/10.3390/s22228916