
Research on Area of Uncertainty of Underwater Moving Target Based on Stochastic Maneuvering Motion Model

Abstract
:1. Introduction
2. Problem Statement
3. State Estimation of an Underwater Moving Target
3.1. Stochastic Maneuvering Motion Model
3.2. Target State Equation
3.3. Target Measurements Model
3.4. Filtering Algorithm
4. Estimation of AOU
4.1. Analysis of AOU Distribution
4.2. Algorithm of AOU Estimation
5. Simulation Results
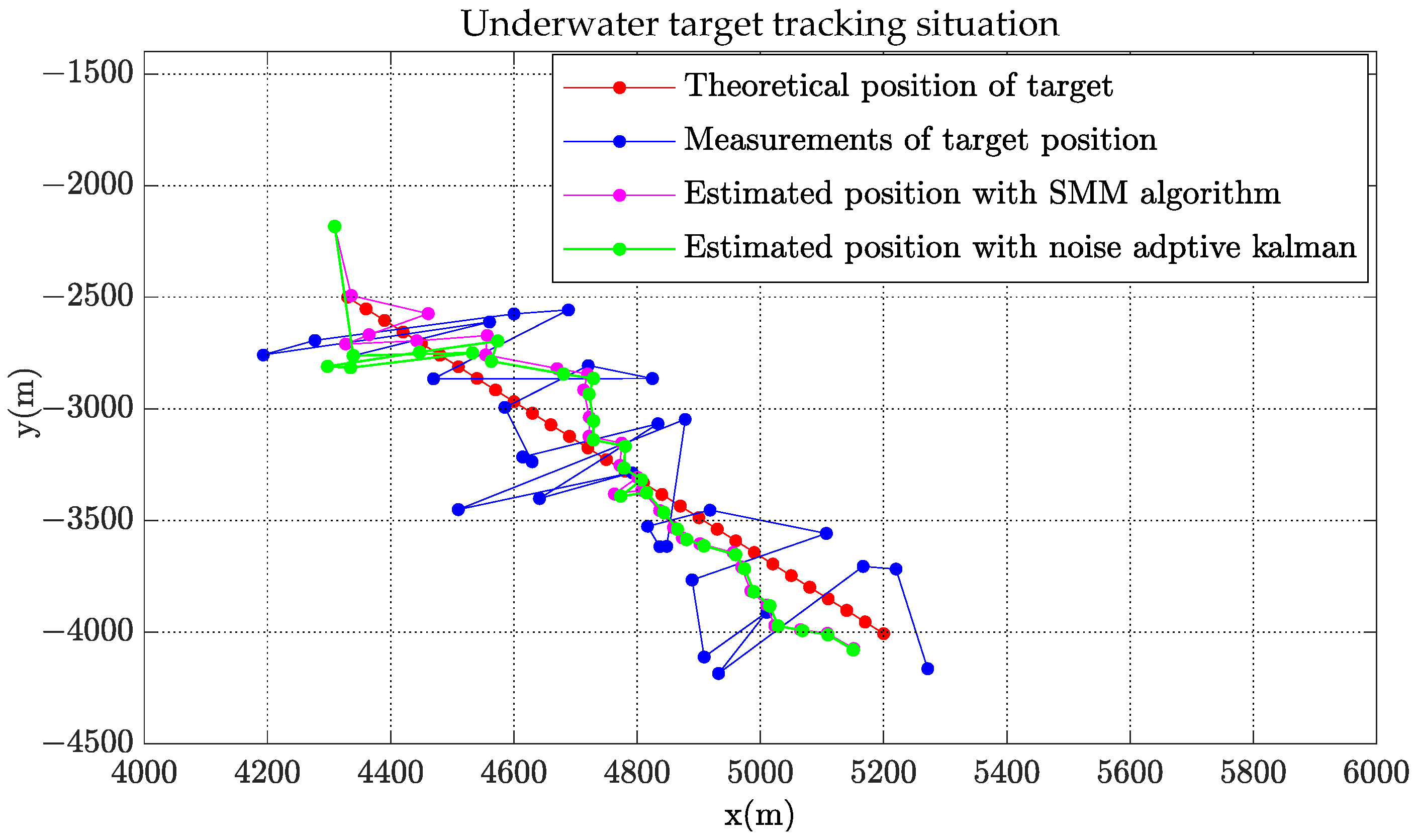
5.1. Simulation of Target Tracking
5.2. Simulation of AOU Estimation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Yu, K.; Sharp, I.; Guo, Y. Ground-Based Wireless Positioning; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2009; pp. 178–179. [Google Scholar]
- Li, X.R.; Jilkove, V.P. A Survey of maneuvering Targets Tracking. Part I: Dynamic Models. IEEE Trans. Aero-Space Electron. Syst. 2003, 39, 1333–1364. [Google Scholar]
- Reza Zekavat, R.; Buehrer, M. Handbook of Position Location: Theory, Practice, and Advances; Wiley-IEEE Press: Hoboken, NJ, USA, 2019; pp. 143–195. [Google Scholar]
- Ullah, I.; Shen, Y.; Su, X.; Esposito, C.; Choi, C. A Localization Based on Unscented Kalman Filter and Particle Filter Localization Algorithms. IEEE Access 2020, 8, 2233–2246. [Google Scholar] [CrossRef]
- Engelberg, S.; Milgrom, B. Tracking using state estimation: A brief introduction. IEEE Instrum. Meas. Mag. 2019, 22, 36–42. [Google Scholar] [CrossRef]
- Yang, X.; Xing, K.; Feng, X. Maneuvering Target Tracking in Dense Clutter Based on Particle Filtering. Chin. J. Aeronaut. 2011, 24, 171–180. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Wang, L.; Cui, J. Weak aerial target tracking algorithm based on cam shift and particle filter. Comput. Engl. Appl. 2011, 47, 192–195. [Google Scholar]
- Zhang, L. Application of Particle Filtering with Partiele Swarm Optimization to Target Tracking. Master’s Thesis, Lanzhou University of Technology, Lanzhou, China, April 2010. [Google Scholar]
- Singer, R.A. Environments Sea RG. A new filter for optimal tracking in dense multi. In Proceedings of the 9th Annual Allerton Conference on Circuit and System Theory, Monticello, IL, USA, 6–8 October 1971; pp. 210–211. [Google Scholar]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation: Theory Algorithms and Software; John Wiley & Sons: Hoboken, NJ, USA, 2004. [Google Scholar]
- Anderson, B.D.; Moore, J.B. Optimal Filtering; Courier Corporation: North Chelmsford, MA, USA, 2012. [Google Scholar]
- Kumar, D.R.; Rao, S.K.; Raju, K.P. Integrated Unscented Kalman filter for underwater passive target tracking with towed array measurements. Optik-Int. J. Light Electron Optics 2016, 127, 2840–2847. [Google Scholar] [CrossRef]
- Kumar, D.R.; Rao, S.K.; Raju, K.P. A novel stochastic estimator using pre-processing technique for long range target tracking in heavy noise environment. Optik 2016, 127, 4520–4530. [Google Scholar] [CrossRef]
- Qu, Y.; Liu, Z.; Sun, S. The research of underwater target tracking adaptive algorithm based on bearings and time-delay. In Proceedings of the IEEE International Conference on Integration Technology, Shenzhen, China, 20–24 March 2007; pp. 530–533. [Google Scholar] [CrossRef]
- Poostpasand, M.; Javidan, R. An adaptive target tracking method for 3D underwater wireless sensor networks. Wirel. Netw. 2017, 24, 2797–2810. [Google Scholar] [CrossRef]
- Modalavalasa, N.; Rao, G.S.B.; Prasad, K.S.; Ganesh, L.; Kumar, M. A new method of target tracking by EKF using bearing and elevation measurements for underwater environment. Robot. Auton. Syst. 2015, 74, 221–228. [Google Scholar] [CrossRef]
- Du, H.; Wang, W.; Bai, L. Observation noise modeling based particle filter: An efficient algorithm for target tracking in glint noise environment. Neurocomputing 2015, 158, 155–166. [Google Scholar] [CrossRef]
- Reif, K.; Gunther, S.; Yaz, E.; Unbehauen, R. Stochastic stability of the discrete-time extended Kalman filter. IEEE Trans. Autom. Control 1999, 44, 714–728. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. New extension of the Kalman filter to nonlinear systems. In Proceedings of the AeroSense’97, Signal Processing, Sensor Fusion, and Target Recognition VI, Orlando, FL, USA, 21–25 April 1991; Volume 3068, pp. 182–193. [Google Scholar] [CrossRef]
- Julier, S.; Uhlmann, J.; Durrant-Whyte, H.F. A new method for the nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. Autom. Control 2000, 45, 477–482. [Google Scholar] [CrossRef] [Green Version]
- Ito, K.; Xiong, K. Gaussian filters for nonlinear filtering problems. IEEE Trans. Autom. Control 2000, 45, 910–927. [Google Scholar] [CrossRef] [Green Version]
- Radhakrishnan, R.; Singh, A.K.; Bhaumik, S.; Tomar, N.K. Multiple sparse-grid Gauss–Hermite filtering. Appl. Math. Model. 2016, 40, 4441–4450. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman filters. IEEE Trans. Autom. Control. 2009, 54, 1254–1269. [Google Scholar] [CrossRef] [Green Version]
- Bhaumik, S.; Swati. Cubature quadrature Kalman filter. IET Signal Process. 2013, 7, 533–541. [Google Scholar] [CrossRef] [Green Version]
- Kundan, K.; Shovan, B.; Sanjeev, A. Tracking an Underwater Object with Unknown Sensor Noise Covariance Using Orthogonal Polynomial Filters. Sensors 2022, 22, 13. [Google Scholar]
- Luo, J.; Han, Y.; Fan, L. Underwater Acoustic Target Tracking: A Review. Sensors 2018, 18, 112. [Google Scholar] [CrossRef] [Green Version]
- Qian, Y.; Chen, Y.; Cao, X.; Wu, J.; Sun, J. An underwater bearing-only multi-target tracking approach based on enhanced Kalman filter. In Proceedings of the IEEE International Conference on Electronic Information and Communication Technology (ICEICT), Harbin, China, 20–22 August 2016; pp. 203–207. [Google Scholar]
- Li, W.; Li, Y.; Ren, S. Tracking an underwater maneuvering target using an adaptive Kalman filter. In Proceedings of the IEEE International Conference of IEEE Region 10 (TENCON), Xi’an, China, 22–25 October 2013; pp. 1–4. [Google Scholar]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking: Dynamic models. Signal Data Process. Small Targets 2000 2000, 4048, 212–235. [Google Scholar]
- Ying, W.; Wang, H.; Li, C.; Li, Q. Methods of target motion estimation for AUV target tracking. In Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA), Harbin, China, 7–10 August 2016; pp. 2139–2144. [Google Scholar]
- Paradowski, L. Uncertainty ellipses and their application to interval estimation of emitter position. IEEE Trans. Aerosp. Electron. Syst. 1997, 33, 126–133. [Google Scholar] [CrossRef]
- Rao, S.K. Bearings-only Passive Target Tracking: Range Uncertainty Ellipse Zone. IETE J. Res. 2020, 68, 2968–2978. [Google Scholar] [CrossRef]
- Lakshmi, K.; Rao, K.S.; Subrahmanyam, K. Uncertainty Zone Estimation of Angles only Tracking in Undersea Environment. Optik 2022. [Google Scholar] [CrossRef]
- Wang, H.; Wang, Z.; Zhang, S. Fluid Mechanics; Hohai University Press: Nanjing, China, 2010. [Google Scholar]
- Gong, G. Summary of Stochastic Differential Equations and Their Applications; Tsinghua University Press: Beijing, China, 2008. [Google Scholar]
- Ning, S. Estimation of Area of Uncertainty for Moving Target Tracking. In Proceedings of the 2013 International Conference on Mechatronic Sciences, Electric Engineering and Computer (MEC), Shenyang, China, 20–22 December 2013; pp. 947–951. [Google Scholar]
- Horn, R.A.; Johnson, C.R. Matrix Analysis; Combridge University Press: Combridge, UK, 2013; pp. 43–49. [Google Scholar]
- Papoulis, A.; Unnikrishna, S. Propability, Random Variables and Stochastic Processes; The McGraw-Hill Companies, Inc.: New York, NY, USA, 2002. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario | Initial Range (m) | Initial Bearing (deg) | Target Speed (m/s) | Target Course (deg) | Observer Speed (m/s) | Observer Course (deg) | Sampling Interval (s) |
|---|---|---|---|---|---|---|---|
| 1 | 5000 | 120 | 6 | 150 | 5 | 150 | 10 |
| 2 | 5000 | 120 | 6 | 160 | 5 | 150 | 10 |
| 3 | 5000 | 120 | 8 | 150 | 5 | 150 | 10 |
| 4 | 5000 | 150 | 8 | 120 | 5 | 150 | 10 |
| 5 | 5000 | 90 | 8 | 160 | 5 | 150 | 10 |
| 6 | 5000 | 120 | 4 | 210 | 5 | 150 | 10 |
| 7 | 20,000 | 60 | 4 | 270 | 5 | 150 | 30 |
| 8 | 20,000 | 90 | 4 | 310 | 5 | 150 | 30 |
| 9 | 20,000 | 90 | 8 | 310 | 5 | 150 | 30 |
| 10 | 20,000 | 60 | 6 | 330 | 5 | 150 | 30 |
| 11 | 20,000 | 60 | 8 | 150 | 5 | 150 | 30 |
| 12 | 20,000 | 120 | 6 | 150 | 5 | 150 | 30 |
| N | Scenario | 1 | 2 | 3 | 4 | 5 | 6 | |
|---|---|---|---|---|---|---|---|---|
| 7 | 413.310 | 417.128 | 426.485 | 426.113 | 435.141 | 399.983 | ||
| 368.170 | 366.807 | 371.960 | 370.608 | 366.821 | 356.518 | |||
| 220.939 | 220.120 | 223.271 | 222.543 | 220.192 | 213.861 | |||
| 9 | 305.744 | 306.727 | 316.616 | 314.058 | 307.680 | 293.429 | ||
| 271.807 | 270.492 | 275.775 | 274.383 | 270.475 | 259.865 | |||
| 163.175 | 162.431 | 165.482 | 164.794 | 162.495 | 156.329 | |||
| 11 | 239.596 | 241.977 | 246.063 | 243.821 | 240.470 | 224.455 | ||
| 214.403 | 213.054 | 218.335 | 216.966 | 213.075 | 202.480 | |||
| 130.486 | 129.753 | 132.693 | 132.063 | 129.849 | 123.910 | |||
| 7 | 629.941 | 643.475 | 652.640 | 647.520 | 765.587 | 630.345 | ||
| 652.417 | 650.370 | 657.978 | 655.598 | 650.127 | 635.025 | |||
| 221.181 | 220.399 | 223.555 | 222.985 | 220.547 | 214.126 | |||
| 9 | 505.424 | 504.768 | 522.597 | 518.075 | 553.676 | 491.760 | ||
| 504.938 | 502.536 | 511.684 | 508.685 | 502.245 | 484.083 | |||
| 163.336 | 162.593 | 165.674 | 165.202 | 162.817 | 156.505 | |||
| 11 | 414.391 | 411.537 | 417.133 | 419.053 | 440.183 | 395.159 | ||
| 404.723 | 402.151 | 411.919 | 408.788 | 401.771 | 382.323 | |||
| 130.582 | 129.881 | 132.822 | 132.445 | 130.144 | 124.057 | |||
| 7 | 546.073 | 539.106 | 564.347 | 563.965 | 547.174 | 514.209 | ||
| 415.476 | 414.109 | 419.742 | 418.352 | 414.146 | 402.624 | |||
| 368.096 | 366.867 | 371.954 | 370.730 | 366.919 | 356.511 | |||
| 9 | 405.472 | 401.254 | 415.828 | 412.366 | 404.800 | 380.204 | ||
| 308.233 | 306.777 | 312.739 | 311.213 | 306.809 | 294.716 | |||
| 271.811 | 270.528 | 275.804 | 274.494 | 270.582 | 259.869 | |||
| 11 | 317.670 | 316.319 | 323.708 | 321.294 | 315.395 | 289.176 | ||
| 243.213 | 241.650 | 247.655 | 246.225 | 241.742 | 229.578 | |||
| 214.418 | 213.055 | 218.316 | 217.109 | 213.166 | 202.498 | |||
| 7 | 723.203 | 722.177 | 749.495 | 757.848 | 839.797 | 709.008 | ||
| 653.884 | 651.785 | 659.553 | 657.448 | 651.929 | 636.578 | |||
| 415.719 | 414.157 | 419.994 | 418.586 | 414.381 | 402.860 | |||
| 9 | 568.903 | 570.687 | 592.456 | 580.603 | 612.238 | 546.415 | ||
| 506.557 | 504.110 | 513.323 | 510.839 | 504.206 | 485.674 | |||
| 308.430 | 306.856 | 312.899 | 311.507 | 307.057 | 294.884 | |||
| 11 | 463.964 | 459.507 | 467.443 | 472.610 | 483.452 | 435.332 | ||
| 406.165 | 403.642 | 413.466 | 410.863 | 403.629 | 383.800 | |||
| 243.307 | 241.796 | 247.821 | 246.488 | 241.960 | 229.719 |
| N | Scenario | 7 | 8 | 9 | 10 | 11 | 12 | |
|---|---|---|---|---|---|---|---|---|
| : | 7 | 413.310 | 417.128 | 426.485 | 426.113 | 435.141 | 399.983 | |
| 368.170 | 366.807 | 371.960 | 370.608 | 366.821 | 356.518 | |||
| 220.939 | 220.120 | 223.271 | 222.543 | 220.192 | 213.861 | |||
| 9 | 305.744 | 306.727 | 316.616 | 314.058 | 307.680 | 293.429 | ||
| 271.807 | 270.492 | 275.775 | 274.383 | 270.475 | 259.865 | |||
| 163.175 | 162.431 | 165.482 | 164.794 | 162.495 | 156.329 | |||
| 11 | 239.596 | 241.977 | 246.063 | 243.821 | 240.470 | 224.455 | ||
| 214.403 | 213.054 | 218.335 | 216.966 | 213.075 | 202.480 | |||
| 130.486 | 129.753 | 132.693 | 132.063 | 129.849 | 123.910 | |||
| : | 7 | 629.941 | 643.475 | 652.640 | 647.520 | 765.587 | 630.345 | |
| 652.417 | 650.370 | 657.978 | 655.598 | 650.127 | 635.025 | |||
| 221.181 | 220.399 | 223.555 | 222.985 | 220.547 | 214.126 | |||
| 9 | 505.424 | 504.768 | 522.597 | 518.075 | 553.676 | 491.760 | ||
| 504.938 | 502.536 | 511.684 | 508.685 | 502.245 | 484.083 | |||
| 163.336 | 162.593 | 165.674 | 165.202 | 162.817 | 156.505 | |||
| 11 | 414.391 | 411.537 | 417.133 | 419.053 | 440.183 | 395.159 | ||
| 404.723 | 402.151 | 411.919 | 408.788 | 401.771 | 382.323 | |||
| 130.582 | 129.881 | 132.822 | 132.445 | 130.144 | 124.057 | |||
| : | 7 | 546.073 | 539.106 | 564.347 | 563.965 | 547.174 | 514.209 | |
| 415.476 | 414.109 | 419.742 | 418.352 | 414.146 | 402.624 | |||
| 368.096 | 366.867 | 371.954 | 370.730 | 366.919 | 356.511 | |||
| 9 | 405.472 | 401.254 | 415.828 | 412.366 | 404.800 | 380.204 | ||
| 308.233 | 306.777 | 312.739 | 311.213 | 306.809 | 294.716 | |||
| 271.811 | 270.528 | 275.804 | 274.494 | 270.582 | 259.869 | |||
| 11 | 317.670 | 316.319 | 323.708 | 321.294 | 315.395 | 289.176 | ||
| 243.213 | 241.650 | 247.655 | 246.225 | 241.742 | 229.578 | |||
| 214.418 | 213.055 | 218.316 | 217.109 | 213.166 | 202.498 | |||
| : | 7 | 723.203 | 722.177 | 749.495 | 757.848 | 839.797 | 709.008 | |
| 653.884 | 651.785 | 659.553 | 657.448 | 651.929 | 636.578 | |||
| 415.719 | 414.157 | 419.994 | 418.586 | 414.381 | 402.860 | |||
| 9 | 568.903 | 570.687 | 592.456 | 580.603 | 612.238 | 546.415 | ||
| 506.557 | 504.110 | 513.323 | 510.839 | 504.206 | 485.674 | |||
| 308.430 | 306.856 | 312.899 | 311.507 | 307.057 | 294.884 | |||
| 11 | 463.964 | 459.507 | 467.443 | 472.610 | 483.452 | 435.332 | ||
| 727.026 | 712.529 | 692.990 | 752.298 | 748.716 | 754.345 | |||
| 438.710 | 429.487 | 418.135 | 456.018 | 451.763 | 455.219 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, S.; Wang, H.; Shen, X.; Sun, Z.; Sun, N. Research on Area of Uncertainty of Underwater Moving Target Based on Stochastic Maneuvering Motion Model. Sensors 2022, 22, 8837. https://doi.org/10.3390/s22228837
Ma S, Wang H, Shen X, Sun Z, Sun N. Research on Area of Uncertainty of Underwater Moving Target Based on Stochastic Maneuvering Motion Model. Sensors. 2022; 22(22):8837. https://doi.org/10.3390/s22228837
Chicago/Turabian StyleMa, Shasha, Haiyan Wang, Xiaohong Shen, Zhenxin Sun, and Ning Sun. 2022. "Research on Area of Uncertainty of Underwater Moving Target Based on Stochastic Maneuvering Motion Model" Sensors 22, no. 22: 8837. https://doi.org/10.3390/s22228837
APA StyleMa, S., Wang, H., Shen, X., Sun, Z., & Sun, N. (2022). Research on Area of Uncertainty of Underwater Moving Target Based on Stochastic Maneuvering Motion Model. Sensors, 22(22), 8837. https://doi.org/10.3390/s22228837