
Dataset with Tactile and Kinesthetic Information from a Human Forearm and Its Application to Deep Learning




Abstract
:1. Introduction
- A tactile-kinesthetic dataset obtained with a gripper of a whole human forearm for pHRI applications.
- An example of the use of this dataset with a deep learning fusion-based regression approach, where both tactile and kinesthetic information are utilized to estimate the location of the gripped section on the forearm.
2. Experimental Setup
2.1. Underactuated Gripper
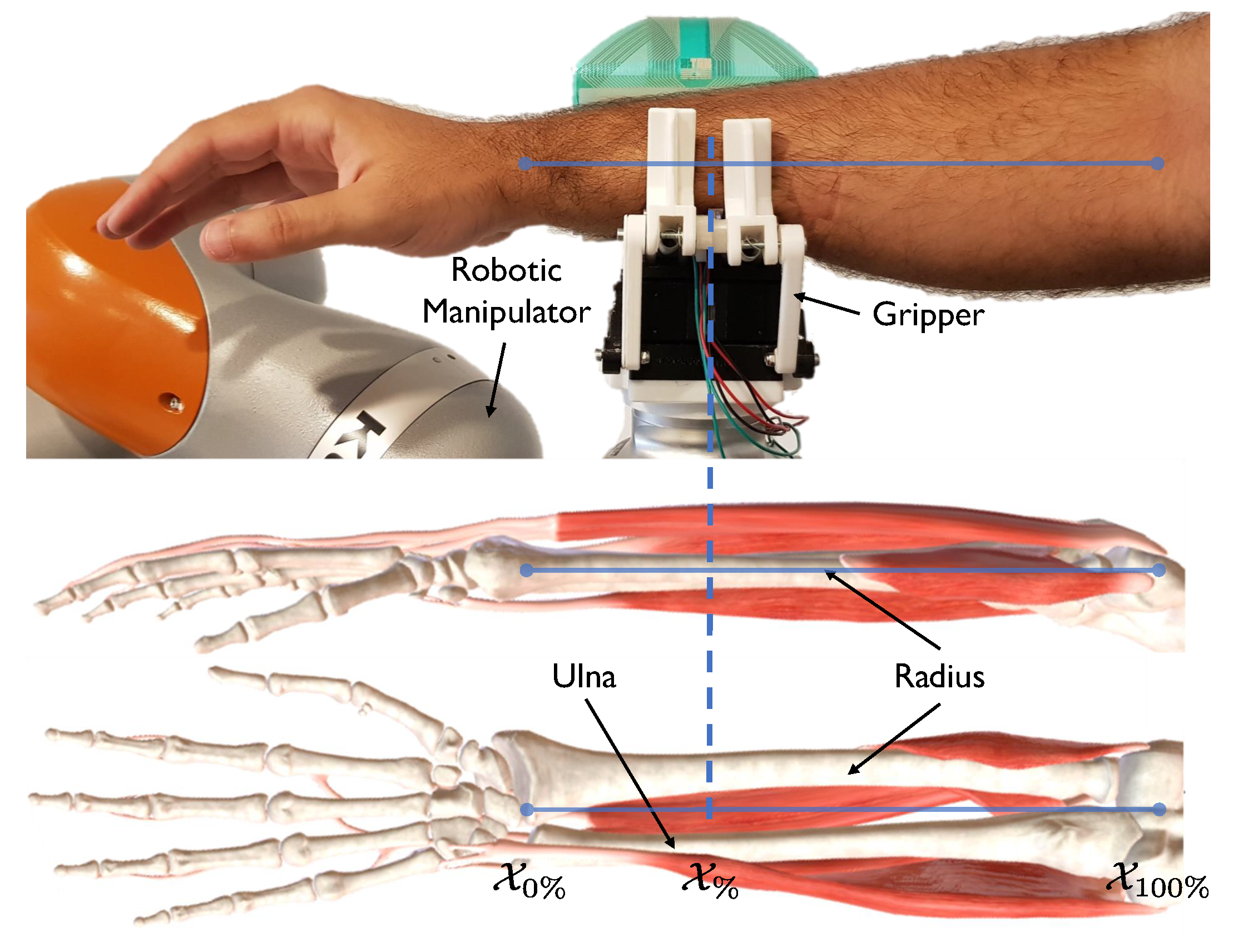
2.2. Forearm Measurement Device
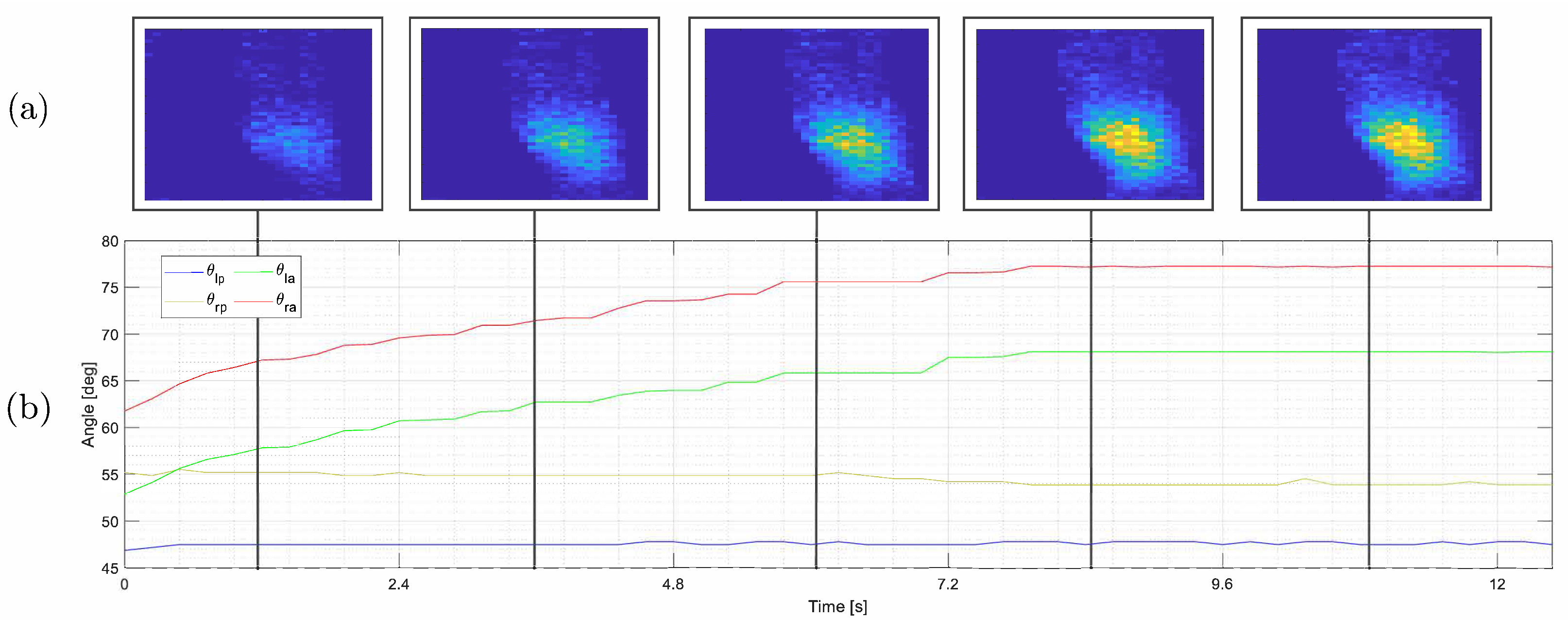
3. Dataset Collection Process
4. Tactile and Kinesthetic Data Fusion for Regression
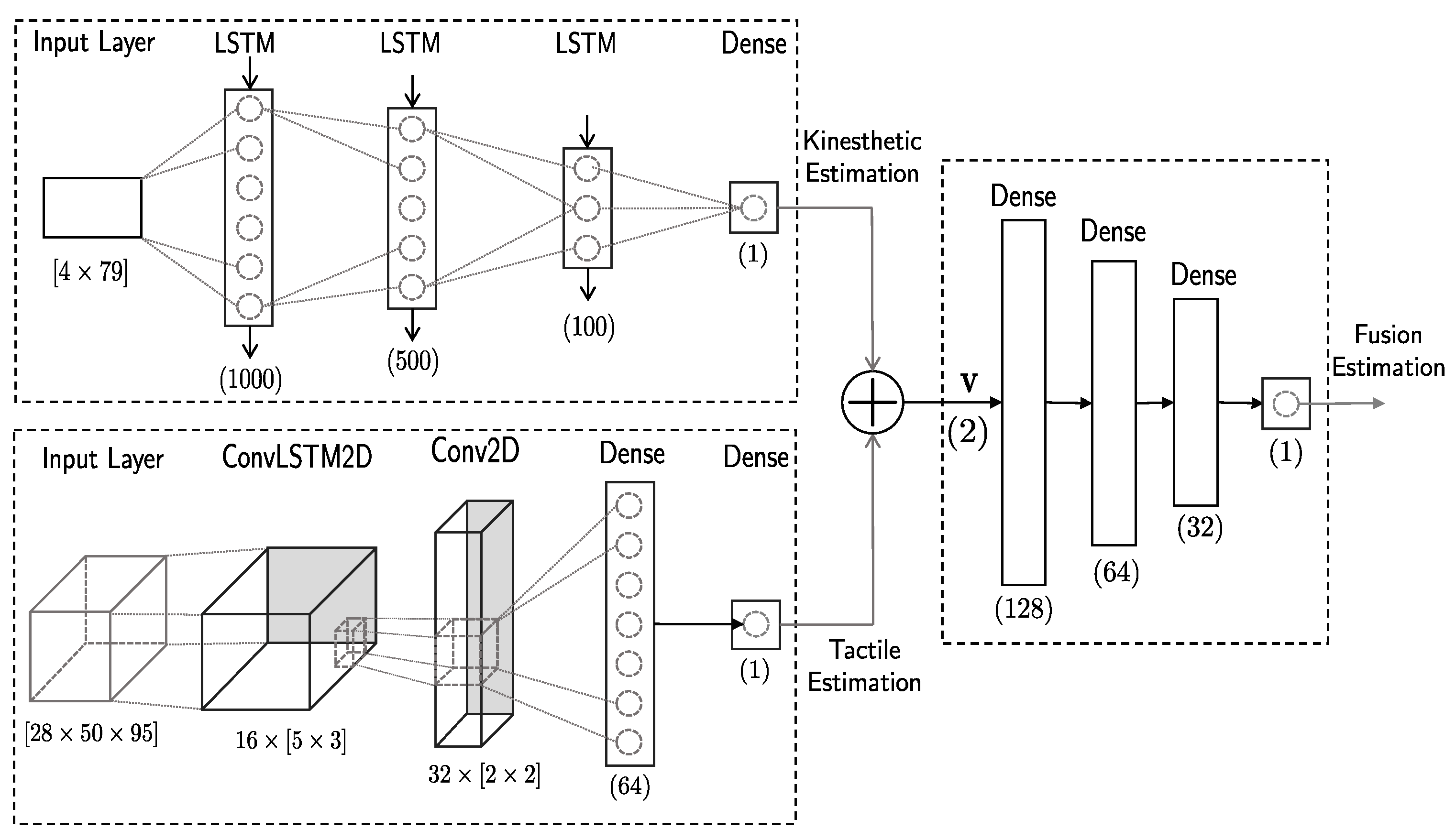
4.1. Neural Networks Structure
4.2. Training
5. Experiments
6. Results and Discussion
7. Conclusions
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
Abbreviations
| HRI | Human–Robot Interaction |
| SAR | Search And Rescue |
| pHRI | physical Human–Robot Interaction |
| GA | Genetic Algorithms |
| LSTM | Long Short-Term Memory |
| EPs | Exploration Procedures |
| ConvLSTM2D | Convolutional LSTM |
| Conv2D | Convolutional |
| tanh | hyperbolic tangent |
| ReLU | Rectified Linear Unit |
| RMSE | Root Mean Squared Error |
| MAE | Mean Absolute Error |
| GPU | Graphics Processing Unit |
| GANs | Generative Adversarial Networks |
References
- Alvarez-de-los Mozos, E.; Renteria, A. Collaborative robots in e-waste management. Procedia Manuf. 2017, 11, 55–62. [Google Scholar] [CrossRef] [Green Version]
- Freschi, C.; Ferrari, V.; Melfi, F.; Ferrari, M.; Mosca, F.; Cuschieri, A. Technical review of the da Vinci surgical telemanipulator. Int. J. Med. Robot. Comput. Assist. Surg. 2013, 9, 396–406. [Google Scholar] [CrossRef] [PubMed]
- Adler, J.R., Jr.; Chang, S.D.; Murphy, M.J.; Doty, J.; Geis, P.; Hancock, S.L. The Cyberknife: A frameless robotic system for radiosurgery. Stereotact. Funct. Neurosurg. 1997, 69, 124–128. [Google Scholar] [CrossRef] [PubMed]
- Kragic, D.; Gustafson, J.; Karaoguz, H.; Jensfelt, P.; Krug, R. Interactive, Collaborative Robots: Challenges and Opportunities. In Proceedings of the Twenty-Seventh International Joint Conference on Artificial Intelligence (IJCAI-18), Stockholm, Sweden, 13–19 July 2018; pp. 18–25. [Google Scholar]
- Ding, H.; Schipper, M.; Matthias, B. Collaborative behavior design of industrial robots for multiple human-robot collaboration. In Proceedings of the IEEE ISR 2013, Seoul, Korea, 24–26 October 2013; pp. 1–6. [Google Scholar]
- Gómez-de Gabriel, J.M.; Gandarias, J.M.; Pérez-Maldonado, F.J.; García-Núñcz, F.J.; Fernández-García, E.J.; García-Cerezo, A.J. Methods for autonomous wristband placement with a search-and-rescue aerial manipulator. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 7838–7844. [Google Scholar]
- Hebbar, V.; Langbort, C. A Model for Tacit Communication in Collaborative Human-UAV Search-and-Rescue. Entropy 2021, 23, 1027. [Google Scholar] [CrossRef] [PubMed]
- Gull, M.A.; Bai, S.; Bak, T. A review on design of upper limb exoskeletons. Robotics 2020, 9, 16. [Google Scholar] [CrossRef] [Green Version]
- Stilli, A.; Cremoni, A.; Bianchi, M.; Ridolfi, A.; Gerii, F.; Vannetti, F.; Wurdemann, H.A.; Allotta, B.; Althoefer, K. AirExGlove—A novel pneumatic exoskeleton glove for adaptive hand rehabilitation in post-stroke patients. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 579–584. [Google Scholar]
- Kokubu, S.; Wang, Y.; Tortós Vinocour, P.E.; Lu, Y.; Huang, S.; Nishimura, R.; Hsueh, Y.H.; Yu, W. Evaluation of Fiber-Reinforced Modular Soft Actuators for Individualized Soft Rehabilitation Gloves. Actuators 2022, 11, 84. [Google Scholar] [CrossRef]
- Geethanjali, P. Myoelectric control of prosthetic hands: State-of-the-art review. Med. Devices 2016, 9, 247. [Google Scholar] [CrossRef] [Green Version]
- Głowiński, S.; Błażejewski, A. An exoskeleton arm optimal configuration determination using inverse kinematics and genetic algorithm. Acta Bioeng. Biomech. 2019, 21, 45–53. [Google Scholar]
- Li, Q.; Kroemer, O.; Su, Z.; Veiga, F.F.; Kaboli, M.; Ritter, H.J. A review of tactile information: Perception and action through touch. IEEE Trans. Robot. 2020, 36, 1619–1634. [Google Scholar] [CrossRef]
- Dahiya, R.S.; Metta, G.; Valle, M.; Sandini, G. Tactile sensing—From humans to humanoids. IEEE Trans. Robot. 2009, 26, 1–20. [Google Scholar] [CrossRef]
- Lederman, S.J.; Klatzky, R.L. Haptic perception: A tutorial. Atten. Percept. Psychophys. 2009, 71, 1439–1459. [Google Scholar] [CrossRef] [PubMed]
- Luo, S.; Bimbo, J.; Dahiya, R.; Liu, H. Robotic tactile perception of object properties: A review. Mechatronics 2017, 48, 54–67. [Google Scholar] [CrossRef] [Green Version]
- Bartolozzi, C.; Natale, L.; Nori, F.; Metta, G. Robots with a sense of touch. Nat. Mater. 2016, 15, 921–925. [Google Scholar] [CrossRef] [PubMed]
- Pyo, S.; Lee, J.; Bae, K.; Sim, S.; Kim, J. Recent progress in flexible tactile sensors for human-interactive systems: From sensors to advanced applications. Adv. Mater. 2021, 33, 2005902. [Google Scholar] [CrossRef]
- Luo, S.; Mou, W.; Althoefer, K.; Liu, H. Novel tactile-sift descriptor for object shape recognition. IEEE Sens. J. 2015, 15, 5001–5009. [Google Scholar] [CrossRef]
- Gandarias, J.M.; Garcia-Cerezo, A.J.; Gomez-de Gabriel, J.M. CNN-based methods for object recognition with high-resolution tactile sensors. IEEE Sens. J. 2019, 19, 6872–6882. [Google Scholar] [CrossRef]
- Liu, H.; Guo, D.; Sun, F. Object recognition using tactile measurements: Kernel sparse coding methods. IEEE Trans. Instrum. Meas. 2016, 65, 656–665. [Google Scholar] [CrossRef]
- Pastor, F.; Gandarias, J.M.; García-Cerezo, A.J.; Gómez-de Gabriel, J.M. Using 3D convolutional neural networks for tactile object recognition with robotic palpation. Sensors 2019, 19, 5356. [Google Scholar] [CrossRef] [Green Version]
- Zapata-Impata, B.S.; Gil, P.; Torres, F. Learning spatio temporal tactile features with a ConvLSTM for the direction of slip detection. Sensors 2019, 19, 523. [Google Scholar] [CrossRef] [Green Version]
- Ballesteros, J.; Pastor, F.; Gómez-de Gabriel, J.M.; Gandarias, J.M.; García-Cerezo, A.J.; Urdiales, C. Proprioceptive Estimation of Forces Using Underactuated Fingers for Robot-Initiated pHRI. Sensors 2020, 20, 2863. [Google Scholar] [CrossRef]
- Gandarias, J.M.; Pastor, F.; Muñoz-Ramírez, A.J.; García-Cerezo, A.J.; Gómez-de Gabriel, J.M. Underactuated gripper with forearm roll estimation for human limbs manipulation in rescue robotics. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 5937–5942. [Google Scholar]
- Spiers, A.J.; Liarokapis, M.V.; Calli, B.; Dollar, A.M. Single-grasp object classification and feature extraction with simple robot hands and tactile sensors. IEEE Trans. Haptics 2016, 9, 207–220. [Google Scholar] [CrossRef] [PubMed]
- Pastor, F.; García-González, J.; Gandarias, J.M.; Medina, D.; Closas, P.; García-Cerezo, A.J.; Gómez-de Gabriel, J.M. Bayesian and neural inference on lstm-based object recognition from tactile and kinesthetic information. IEEE Robot. Autom. Lett. 2020, 6, 231–238. [Google Scholar] [CrossRef]
- Wang, P.; Liu, J.; Hou, F.; Chen, D.; Xia, Z.; Guo, S. Organization and understanding of a tactile information dataset TacAct for physical human-robot interaction. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 7328–7333. [Google Scholar]
- Sundaram, S.; Kellnhofer, P.; Li, Y.; Zhu, J.Y.; Torralba, A.; Matusik, W. Learning the signatures of the human grasp using a scalable tactile glove. Nature 2019, 569, 698–702. [Google Scholar] [CrossRef] [PubMed]
- Albini, A.; Cannata, G. Pressure distribution classification and segmentation of human hands in contact with the robot body. Int. J. Robot. Res. 2020, 39, 668–687. [Google Scholar] [CrossRef] [Green Version]
- Kerzel, M.; Strahl, E.; Gaede, C.; Gasanov, E.; Wermter, S. Neuro-robotic haptic object classification by active exploration on a novel dataset. In Proceedings of the 2019 International Joint Conference on Neural Networks (IJCNN), Budapest, Hungary, 14–19 July 2019; pp. 1–8. [Google Scholar]
- Sack, J.D. BioDigital: Powering the World’s Understanding of the Human Body. Am. Biol. Teach. 2021, 83, 71. [Google Scholar] [CrossRef]
- Okamura, A.M.; Cutkosky, M.R. Feature detection for haptic exploration with robotic fingers. Int. J. Robot. Res. 2001, 20, 925–938. [Google Scholar] [CrossRef]
- Zhang, F.; Lai, C.; Chen, W. Weather Radar Echo Extrapolation Method Based on Deep Learning. Atmosphere 2022, 13, 815. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Convolutional LSTM network: A machine learning approach for precipitation nowcasting. Adv. Neural Inf. Process. Syst. 2015, 28, 1–9. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| Number of tactels | 1700 |
| Max. pressure | 34 KPa |
| Temperature range | C to C |
| Thickness | mm |
| Tactels density | tactels/cm |
| Silicone pad | Ecoflex 00-30 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| a | 40 mm | 40 mm | |
| b | 20 mm | 44.72 mm | |
| c | 60 mm | 70 mm | |
| d | 25 mm | w | 10 mm |
| Tactile | Kinesthetic | Fusion | |
|---|---|---|---|
| RMSE | 13.42 | 9.74 | 7.61 |
| MAE | 13.09 | 8.81 | 7.08 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pastor, F.; Lin-Yang, D.-h.; Gómez-de-Gabriel, J.M.; García-Cerezo, A.J. Dataset with Tactile and Kinesthetic Information from a Human Forearm and Its Application to Deep Learning. Sensors 2022, 22, 8752. https://doi.org/10.3390/s22228752
Pastor F, Lin-Yang D-h, Gómez-de-Gabriel JM, García-Cerezo AJ. Dataset with Tactile and Kinesthetic Information from a Human Forearm and Its Application to Deep Learning. Sensors. 2022; 22(22):8752. https://doi.org/10.3390/s22228752
Chicago/Turabian StylePastor, Francisco, Da-hui Lin-Yang, Jesús M. Gómez-de-Gabriel, and Alfonso J. García-Cerezo. 2022. "Dataset with Tactile and Kinesthetic Information from a Human Forearm and Its Application to Deep Learning" Sensors 22, no. 22: 8752. https://doi.org/10.3390/s22228752
APA StylePastor, F., Lin-Yang, D.-h., Gómez-de-Gabriel, J. M., & García-Cerezo, A. J. (2022). Dataset with Tactile and Kinesthetic Information from a Human Forearm and Its Application to Deep Learning. Sensors, 22(22), 8752. https://doi.org/10.3390/s22228752