
Low-Error Soil Moisture Sensor Employing Spatial Frequency Domain Transmissometry
 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
2.1. Spatial Frequency Domain Transmissometry
2.2. Water Content Calibration Using Sand
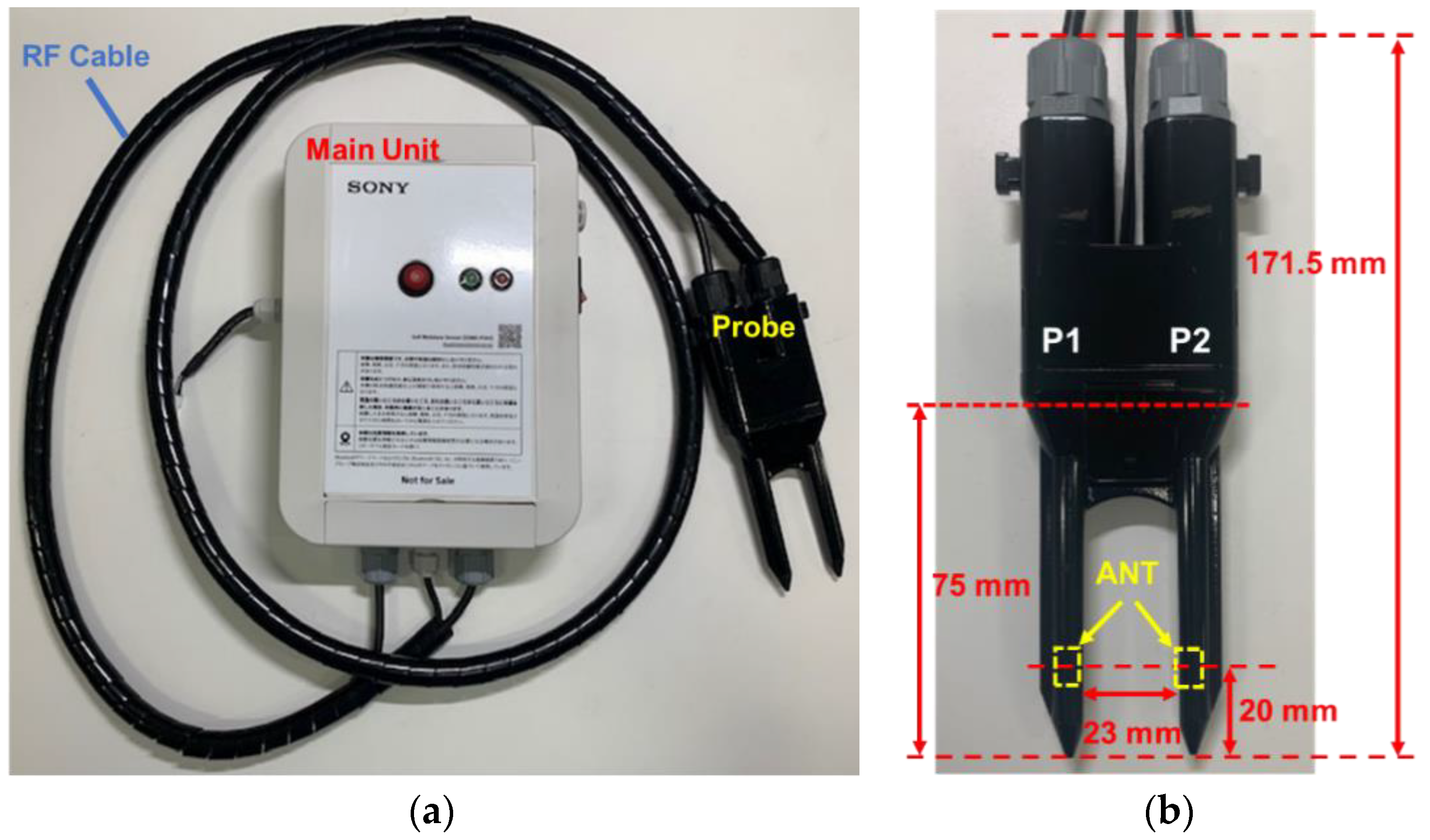
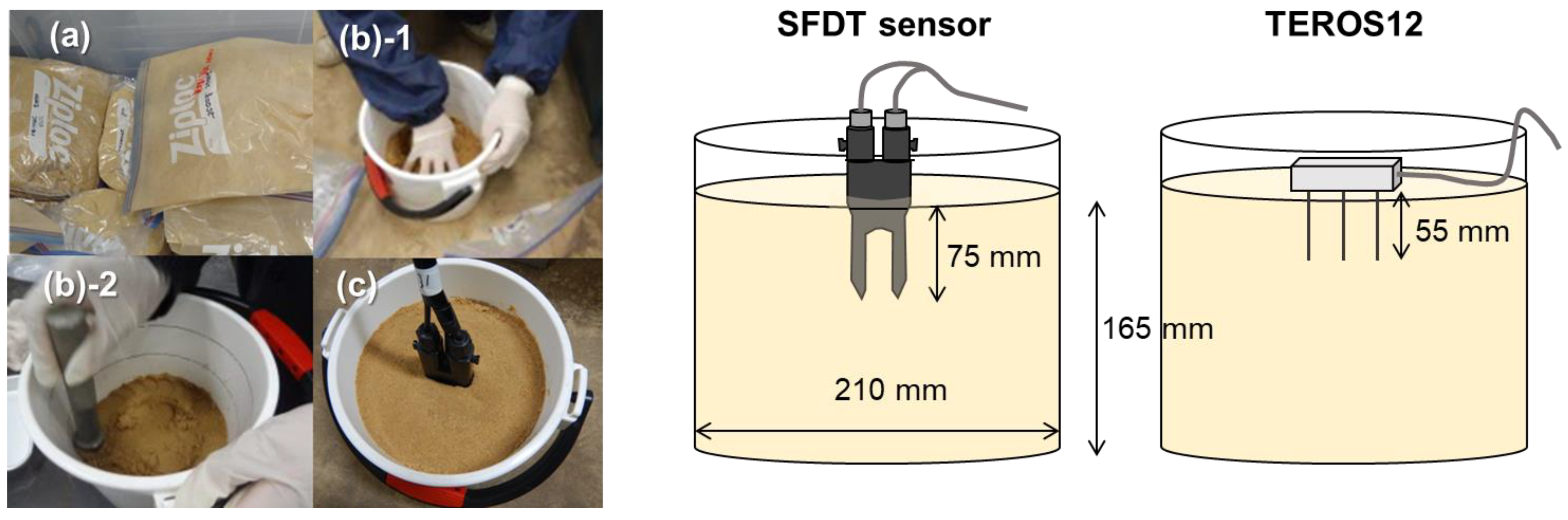
2.2.1. SFDT Sensor System
2.2.2. TEROS12 Capacitance Sensor
2.2.3. Calibration Experiments Using Distilled Water
2.3. Evaluation of Effects of EC and Air Gap Using Sand
2.4. Theoretical Calibration Equation Model and Air Gap Model for SFDT Sensor
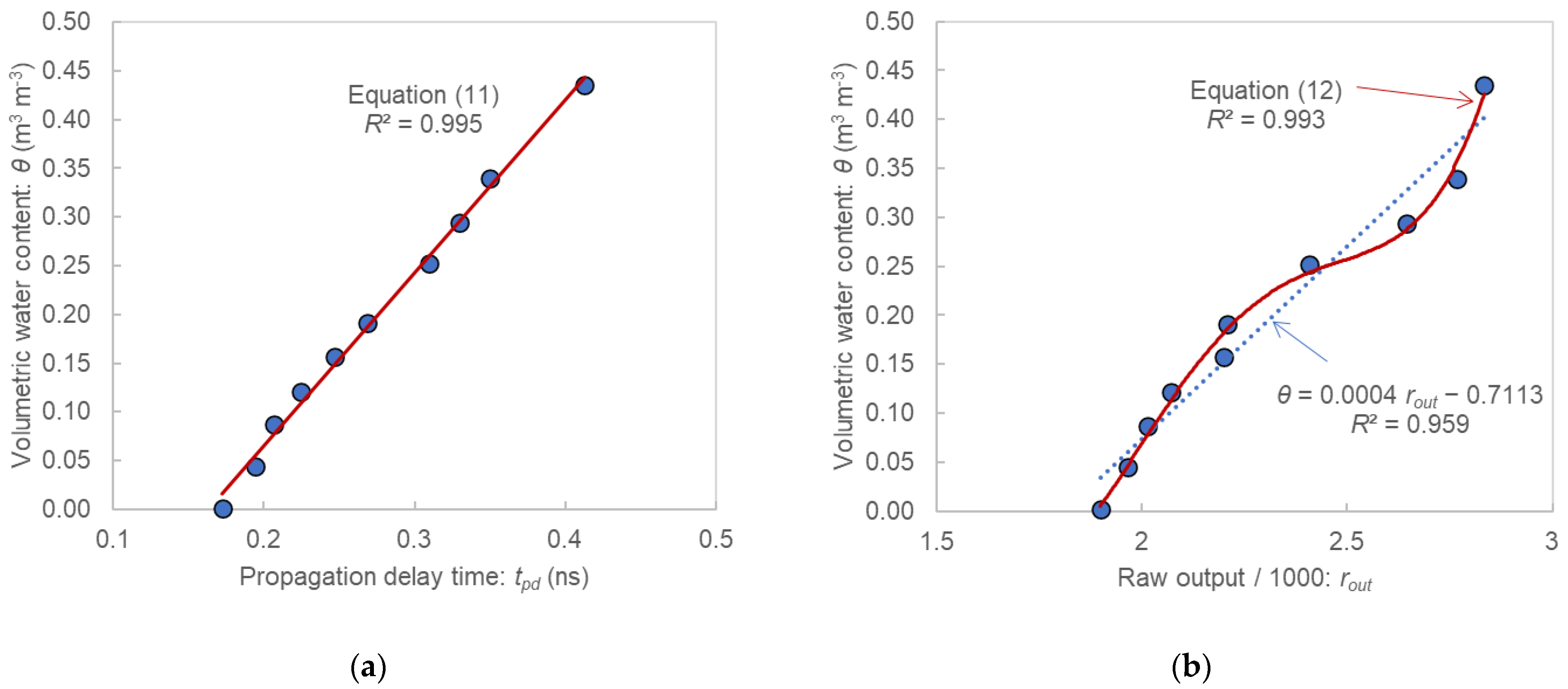
2.4.1. Calibration Equation Model of Toyoura Sand
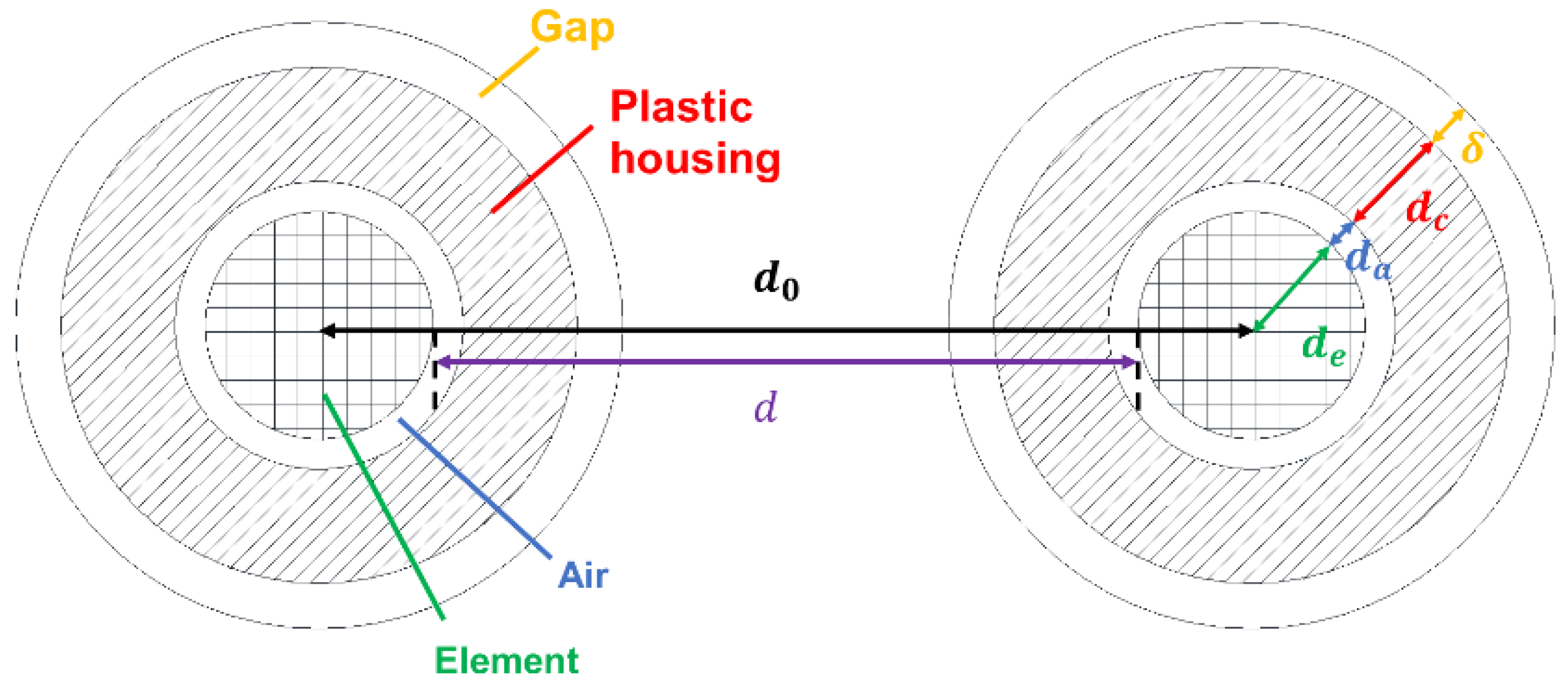
2.4.2. Air Gap Model for SFDT Sensor
3. Results and Discussion
3.1. Water Content Calibration Using Sand
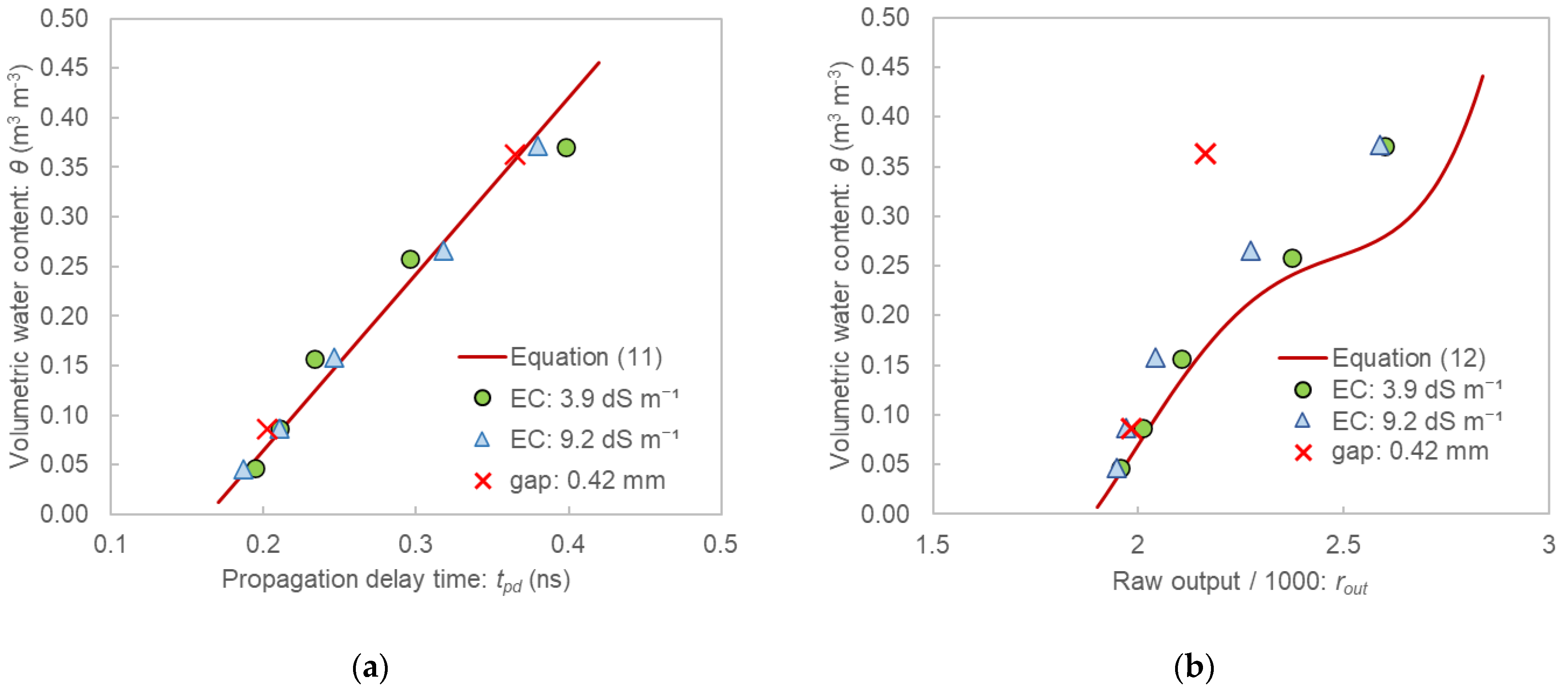
3.2. Evaluation of Effects of EC and Air Gap
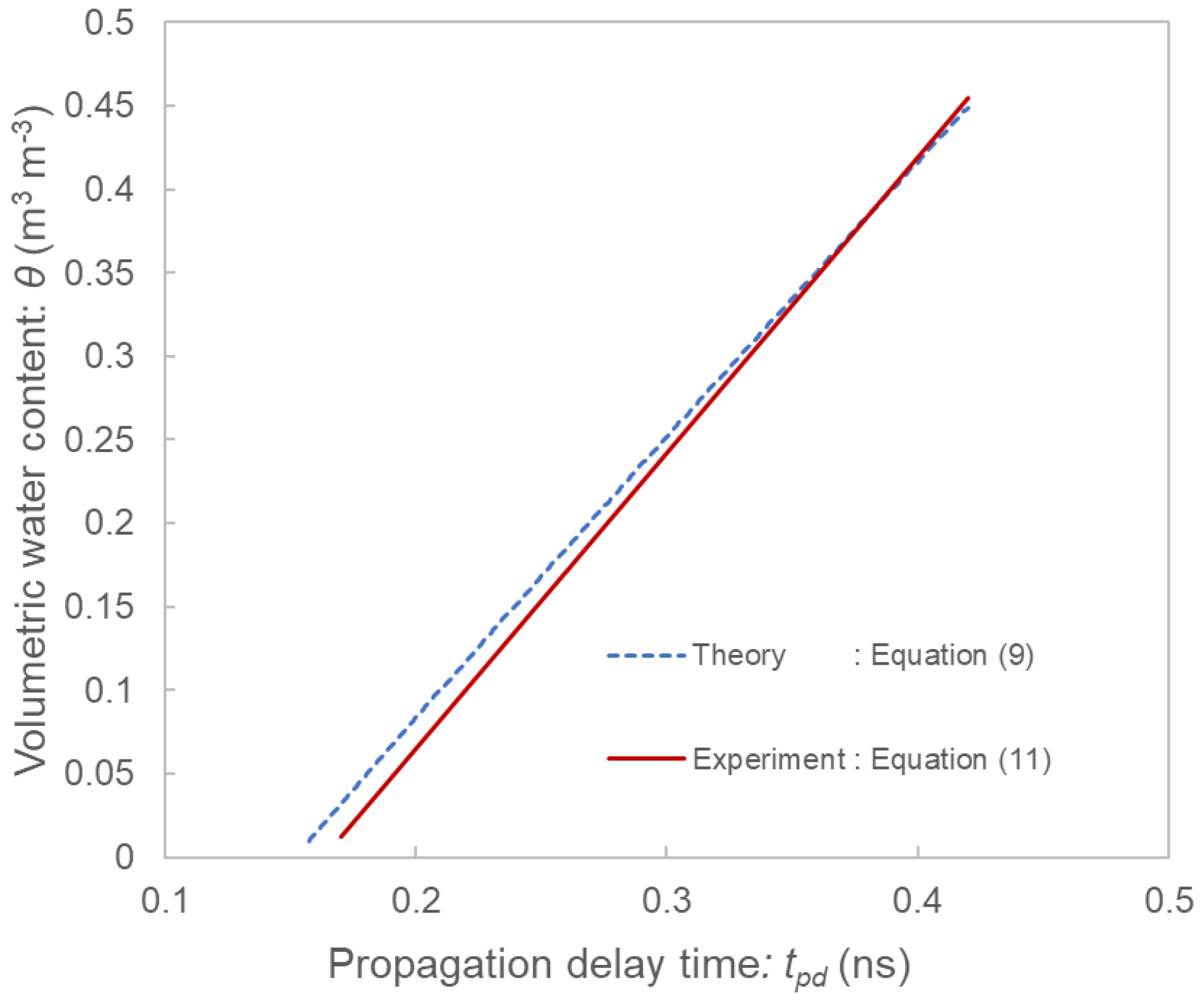
3.3. Comparison of Theoretical Models and Experimental Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Su, S.L.; Singh, D.N.; Baghini, M.S. A critical review of soil moisture measurement. Meas. J. Int. Meas. Confed. 2014, 54, 92–105. [Google Scholar] [CrossRef]
- Nicolson, A.M.; Ross, G.F. Measurement of the Intrinsic Properties of Materials by Time-Domain Techniques. IEEE Trans. Instrum. Meas. 1970, 19, 377–382. [Google Scholar] [CrossRef] [Green Version]
- Weir, W.B. Automatic Measurement of Complex Dielectric Constant and Permeability at Microwave Frequencies. Proc. IEEE 1974, 62, 33–36. [Google Scholar] [CrossRef]
- Campbell, C.K. Free-Space Permittivity Measurements on Dielectric Materials at Millimeter Wavelengths. IEEE Trans. Instrum. Meas. 1978, 27, 54–58. [Google Scholar] [CrossRef]
- Ghodgaonkar, D.K.; Varadan, V.V.; Varadan, V.K. A Free-Space Method for Measurement of Dielectric Constants and Loss Tangents at Microwave Frequencies. IEEE Trans. Instrum. Meas. 1989, 38, 789–793. [Google Scholar] [CrossRef]
- Baker-Jarvis, J.R.; Janezic, M.D.; Riddle, B.F.; Johnk, R.T.; Holloway, C.L.; Geyer, R.G.; Grosvenor, C.A. Measuring the Permittivity and Permeability of Lossy Materials: Solids, Liquids, Metals, and Negative-Index Materials; Technical Note (NIST TN); National Institute of Standards and Technology: Gaithersburg, MD, USA, 2005. [Google Scholar]
- Hardie, M. Review of Novel and Emerging Proximal Soil Moisture Sensors for Use in Agriculture. Sensors 2020, 20, 6934. [Google Scholar] [CrossRef]
- Peddinti, S.R.; Hopmans, J.W.; Abou Najm, M.; Kisekka, I. Assessing Effects of Salinity on the Performance of a Low-Cost Wireless Soil Water Sensor. Sensors 2020, 20, 7041. [Google Scholar] [CrossRef]
- Parvin, N.; Degre, A. Soil-specific calibration of capacitance sensors considering clay content and bulk density. Soil Res. 2016, 54, 111–119. [Google Scholar] [CrossRef]
- Singh, J.; Heeren, D.M.; Rudnick, D.R.; Woldt, W.E.; Bai, G.; Ge, Y.; Luck, J.D. Soil Structure and Texture Effects on the Precision of Soil Water Content Measurements with a Capacitance-Based Electromagnetic Sensor. Trans. ASABE 2020, 63, 141–152. [Google Scholar] [CrossRef] [Green Version]
- Saito, T.; Fujimaki, H.; Inoue, M. Calibration and simultaneous monitoring of soil water content and salinity with capacitance and fourelectrode probes. Am. J. Environ. Sci. 2008, 6, 683–692. [Google Scholar]
- Satoh, Y.; Kakiuchi, H. Calibration method to address influences of temperature and electrical conductivity for a low-cost soil water content sensor in the agricultural field. Agric. Water Manag. 2021, 255, 107015. [Google Scholar] [CrossRef]
- Saito, T.; Fujimaki, H.; Yasuda, H.; Inosako, K.; Inoue, M. Calibration of temperature effect on dielectric probes using time series field data. Vadose Zone J. 2013, 12, 1–6. [Google Scholar] [CrossRef]
- Saito, T.; Fujimaki, H.; Yasuda, H.; Inoue, M. Empirical temperature calibration of capacitance probes to measure soil water. Soil Sci. Soc. Am. J. 2009, 73, 1931–1937. [Google Scholar] [CrossRef]
- Robinson, D.A.; Campbell, C.S.; Hopmans, J.W.; Hornbuckle, B.K.; Jones, S.B.; Knight, R.; Ogden, F.; Selker, J.; Wendroth, O. Soil moisture measurement for ecological and hydrological watershed-scale observatories: A review. Vadose Zone J. 2008, 7, 358–389. [Google Scholar] [CrossRef] [Green Version]
- Woszczyk, A.; Szerement, J.; Lewandowski, A.; Kafarski, M.; Szypłowska, A.; Wilczek, A.; Skierucha, W. An open-ended probe with an antenna for the measurement of the water content in the soil. Comput. Electron. Agric. 2019, 167, 105042. [Google Scholar] [CrossRef]
- Bore, T.; Wagner, N.; Delepine Lesoille, S.; Taillade, F.; Six, G.; Daout, F.; Placko, D. Error Analysis of Clay-Rock Water Content Estimation with Broadband High-Frequency Electromagnetic Sensors—Air Gap Effect. Sensors 2016, 16, 554. [Google Scholar] [CrossRef] [Green Version]
- Annan, A.P. Time Domain Reflectometry—Air-Gap Problem for Parallel Wire Transmission Lines. Geol. Surv. Can. Pap. 1977, 77, 59–62. [Google Scholar]
- Dean, T.J.; Bell, J.P.; Baty, A.J.B. Soil Moisture Measurement by an Improved Capacitance Technique, Part I. Sensor Design and Performance. J. Hydrol. 1987, 93, 67–78. [Google Scholar] [CrossRef]
- Hilhorst, M.A. Dielectric Characterisation of Soil; Wageningen University and ResearchL: Wageningen, The Netherlands, 1998. [Google Scholar]
- Meter Group, Inc. Teros 11/12 Integrator Guide; Meter Group, Inc.: Pullman, WA, USA, 2018; Available online: http://manuals.decagon.com/Integrator%20Guide/18224%20TEROS%2011-12%20Integrator%20Guide.pdf (accessed on 3 June 2022).
- Campbell Scientific, Inc. Product Manual CS616 and CS625; Campbell Scientific, Inc.: Logan, UT, USA, 2020; Available online: https://s.campbellsci.com/documents/au/manuals/cs616.pdf (accessed on 3 June 2022).
- Chen, Y.; Or, D. Effects of Maxwell-Wagner Polarization on Soil Complex Dielectric Permittivity under Variable Temperature and Electrical Conductivity. Water Resour. Res. 2006, 42, W06424. [Google Scholar] [CrossRef]
- Pelletier, M.G.; Karthikeyan, S.; Green, T.R.; Schwartz, R.C.; Wanjura, J.D.; Holt, G.A. Soil Moisture Sensing via Swept Frequency Based Microwave Sensors. Sensors 2012, 12, 753–767. [Google Scholar] [CrossRef] [Green Version]
- Birchak, J.R.; Gardner, C.G.; Hipp, J.E.; Victor, J.M. High Dielectric Constant Microwave Probes for Sensing Soil Moisture. Proc. IEEE 1974, 62, 93–98. [Google Scholar] [CrossRef]
- Dobson, M.C.; Ulaby, F.T.; Hallikainen, M.T.; El-Rayes, M.A. Microwave Dielectric Behavior of Wet Soil-Part II: Dielectric Mixing Models. IEEE Trans. Geosci. Remote Sens. 1985, 1, 35–46. [Google Scholar] [CrossRef]
- Ministry of Internal Affairs and Communications. Regulation of the Extremely Low Power Radio Station. MIC The Radio Use Web Site. Available online: https://www.tele.soumu.go.jp/e/ref/material/rule/index.htm (accessed on 2 August 2022).
- Riddle, B.; Baker-Jarvis, J.; Krupka, J. Complex Permittivity Measurements of Common Plastics over Variable Temperatures. IEEE Trans. Microw. Theory Tech. 2003, 51, 727–733. [Google Scholar] [CrossRef]
- Kindt, J.T.; Schmuttenmaer, C.A. Far-Infrared Dielectric Properties of Polar Liquids Probed by Femtosecond Terahertz Pulse Spectroscopy. J. Phys. Chem. 1996, 100, 10373–10379. [Google Scholar] [CrossRef]
- Geyer, R.G. NIST Technical Note 1338: Dielectric Characterization and Reference Materials; Technical Note (NIST TN)-1338; National Institute of Standards and Technology: Gaithersburg, MD, USA, 1990. [Google Scholar]
- Topp, G.C.; Davis, J.L.; Annan, A.P. Electromagnetic Determination of Soil Water Content: Measurements in Coaxial Transmission Lines. Water Resour. Res. 1980, 16, 574–582. [Google Scholar] [CrossRef] [Green Version]
- Miyamoto, T.; Chikushi, J. Time Domain Reflectometry Calibration for Typical Upland Soils in Kyushu, Japan. Jpn. Agric. Res. Q. JARQ 2006, 40, 225–231. [Google Scholar] [CrossRef] [Green Version]
- Dirksen, C.; Dasberg, S. Improved Calibration of Time Domain Reflectometry Soil Water Content Measurements. Soil Sci. Soc. Am. J. 1993, 57, 660–667. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saito, T.; Oishi, T.; Inoue, M.; Iida, S.; Mihota, N.; Yamada, A.; Shimizu, K.; Inumochi, S.; Inosako, K. Low-Error Soil Moisture Sensor Employing Spatial Frequency Domain Transmissometry. Sensors 2022, 22, 8658. https://doi.org/10.3390/s22228658
Saito T, Oishi T, Inoue M, Iida S, Mihota N, Yamada A, Shimizu K, Inumochi S, Inosako K. Low-Error Soil Moisture Sensor Employing Spatial Frequency Domain Transmissometry. Sensors. 2022; 22(22):8658. https://doi.org/10.3390/s22228658
Chicago/Turabian StyleSaito, Tadaomi, Takahiro Oishi, Mitsuhiro Inoue, Sachio Iida, Norihito Mihota, Atsushi Yamada, Kohei Shimizu, Satoru Inumochi, and Koji Inosako. 2022. "Low-Error Soil Moisture Sensor Employing Spatial Frequency Domain Transmissometry" Sensors 22, no. 22: 8658. https://doi.org/10.3390/s22228658
APA StyleSaito, T., Oishi, T., Inoue, M., Iida, S., Mihota, N., Yamada, A., Shimizu, K., Inumochi, S., & Inosako, K. (2022). Low-Error Soil Moisture Sensor Employing Spatial Frequency Domain Transmissometry. Sensors, 22(22), 8658. https://doi.org/10.3390/s22228658