
Design Method of High-Order Kalman Filter for Strong Nonlinear System Based on Kronecker Product Transform




Abstract
:1. Introduction
2. Problem Formulation
3. Augmented Modeling of Nonlinear Systems
4. Filter Design
4.1. Filter Design
4.2. Linearization of Nonlinear Functions
| Algorithm 1: Filtering process. | |
| Step 1. | Model the augmented form of the state equation based on (8)–(16) |
| Step 2. | Realize the linearization process of the nonlinear system to obtain and linear equation based on (35)–(38) |
| Step 3. | Calculate state prediction value according to (18) |
| Step 4. | Calculate the error of the state prediction according to (19) |
| Step 5. | Determine the covariance matrix of the state prediction error with (20) |
| Step 6. | Compute the forecast and prediction error of system measurement and with (21) and (22) |
| Step 7. | Solve for Kalman gain matrix based on (24)–(28) |
| Step 8. | Calculate the state estimate at using (23) |
| Step 9. | Update the estimated error covariance matrix by (28)–(30) |
| Step 10. | Set and go to Step 2. |
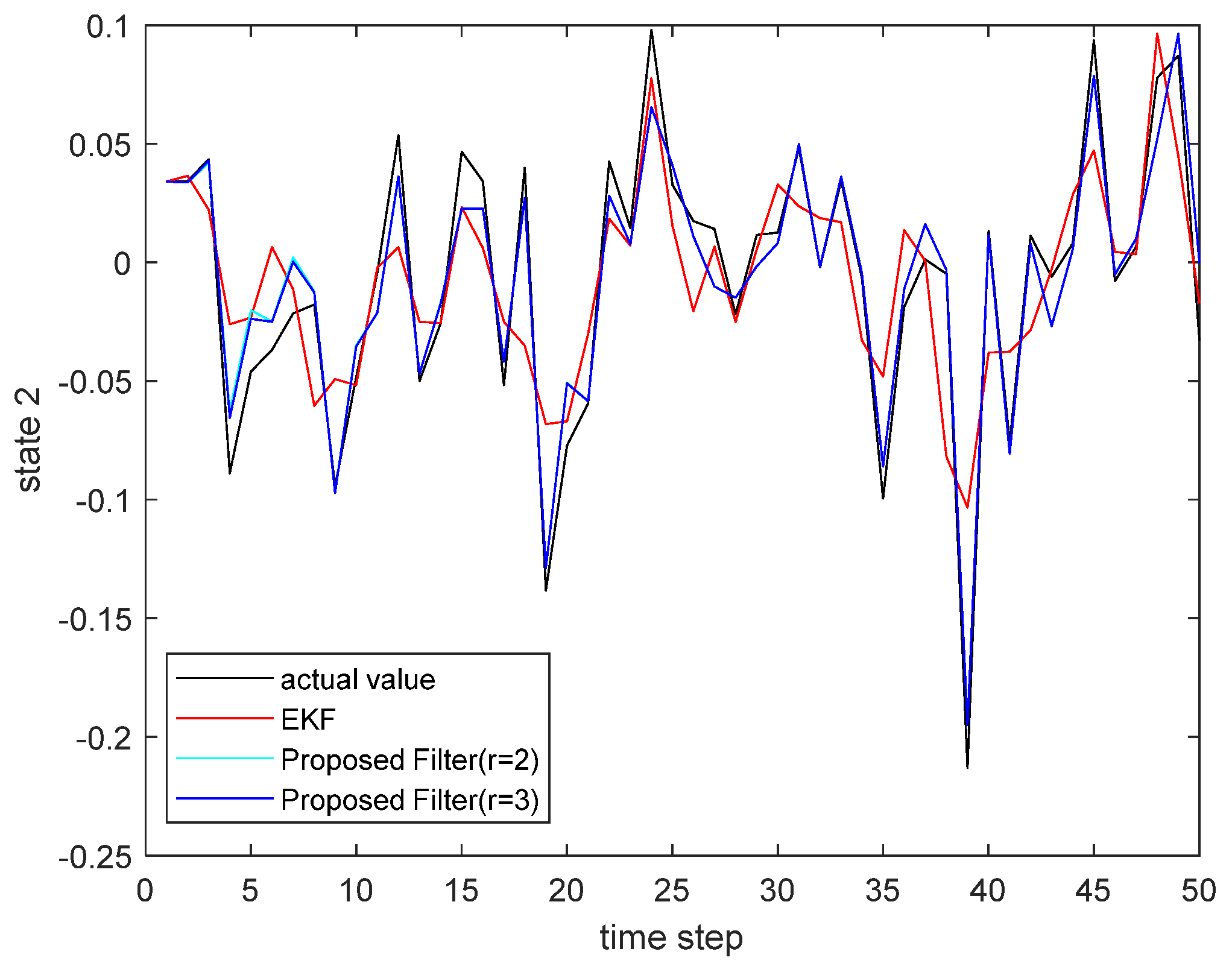
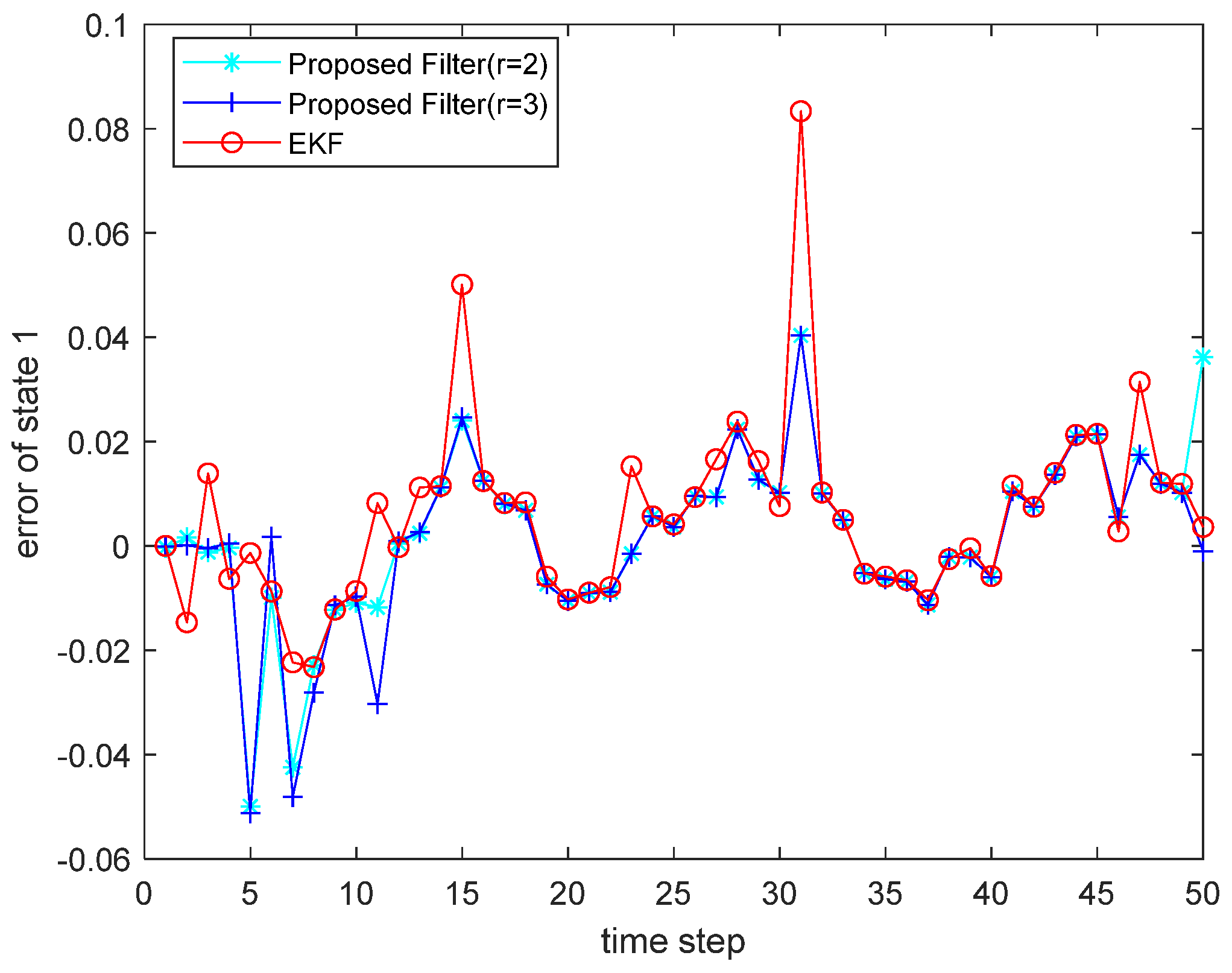
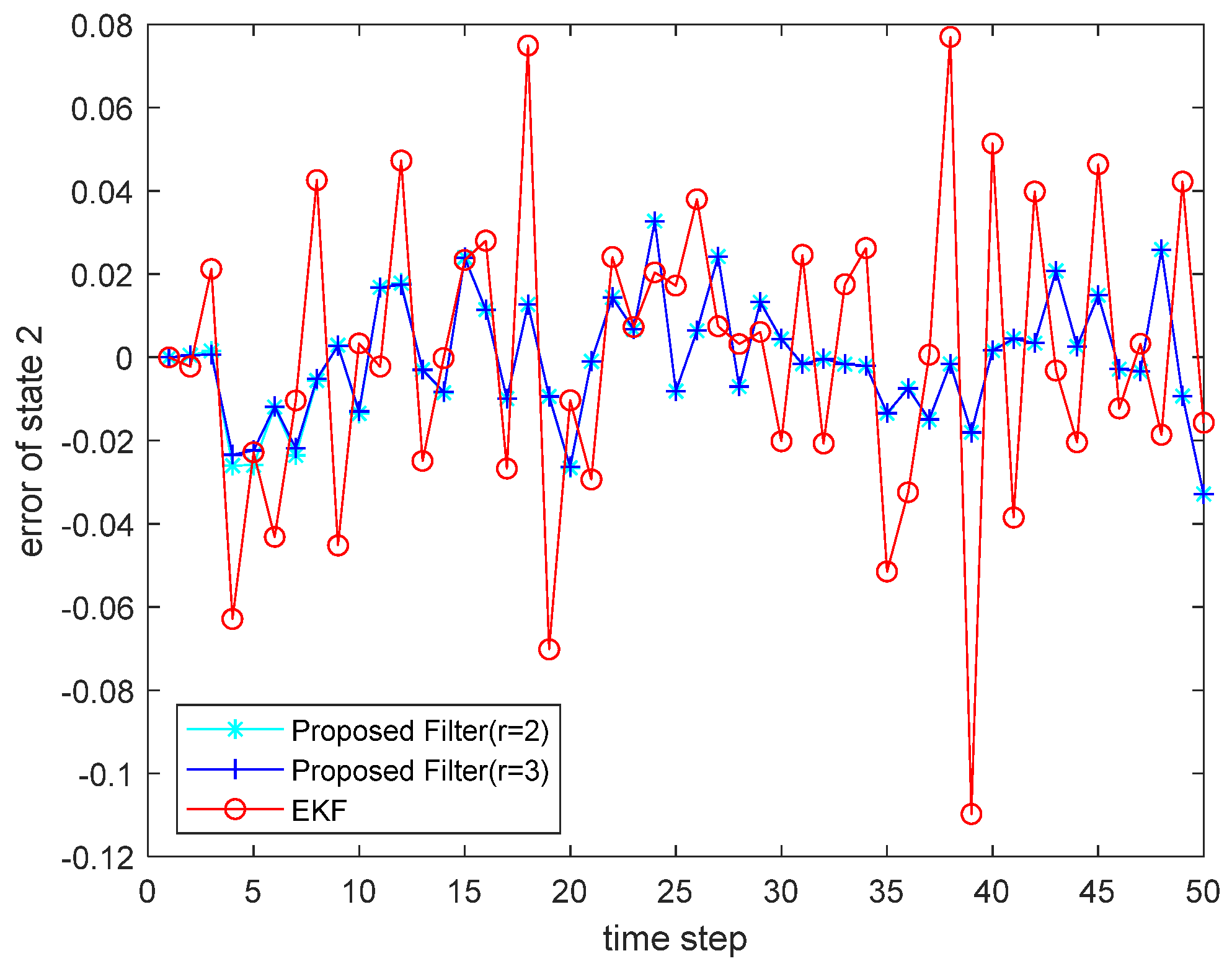
5. Numerical Simulations
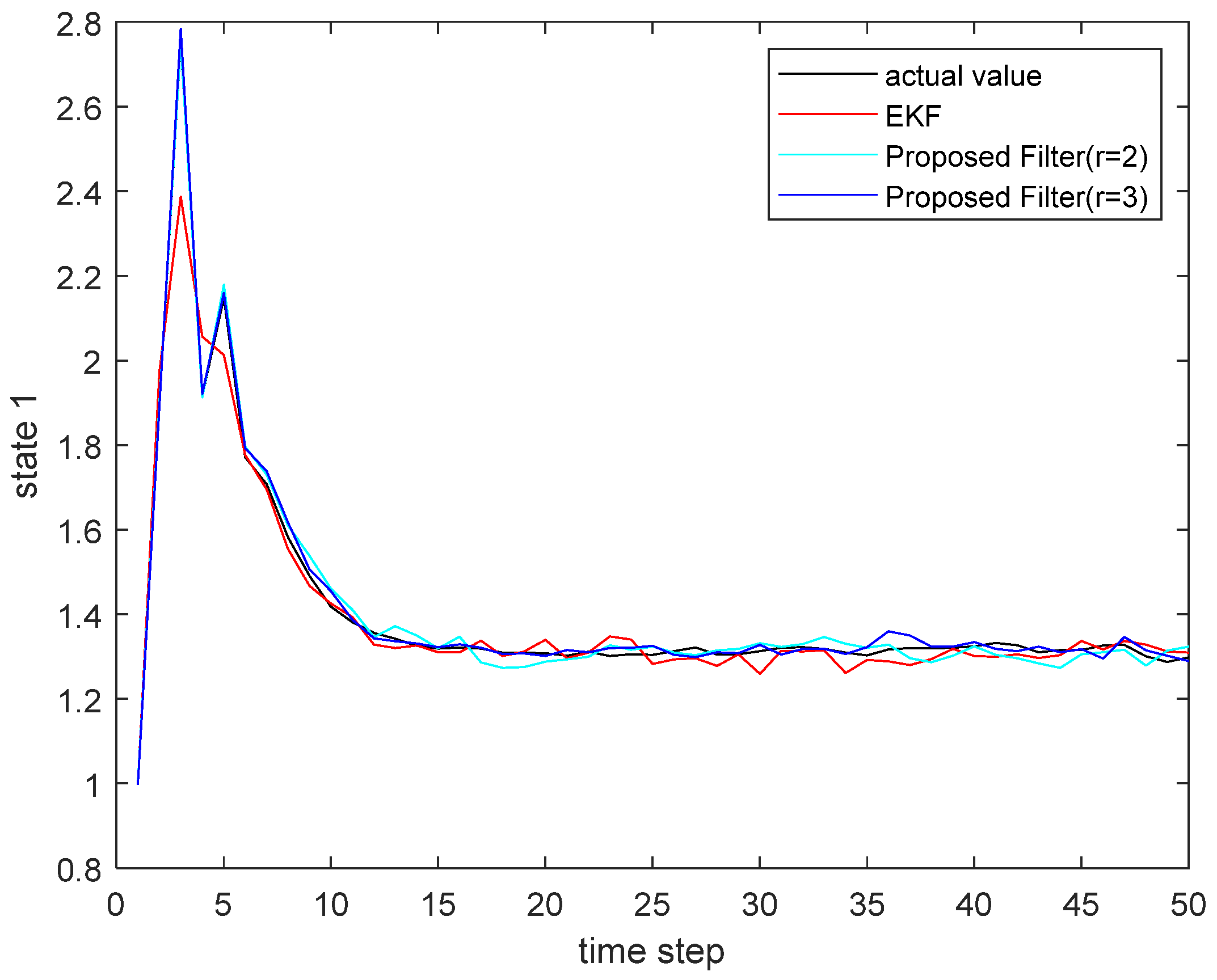
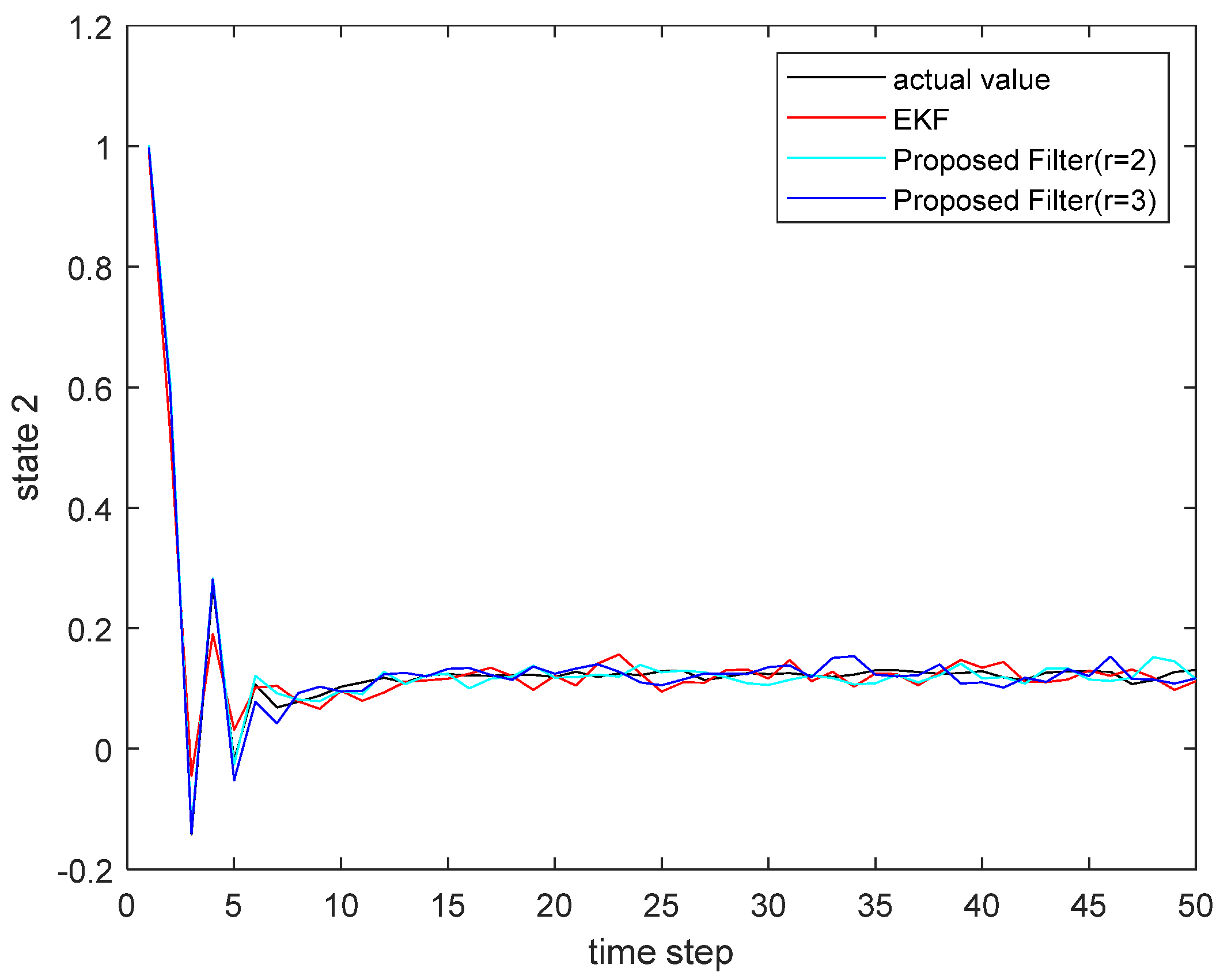
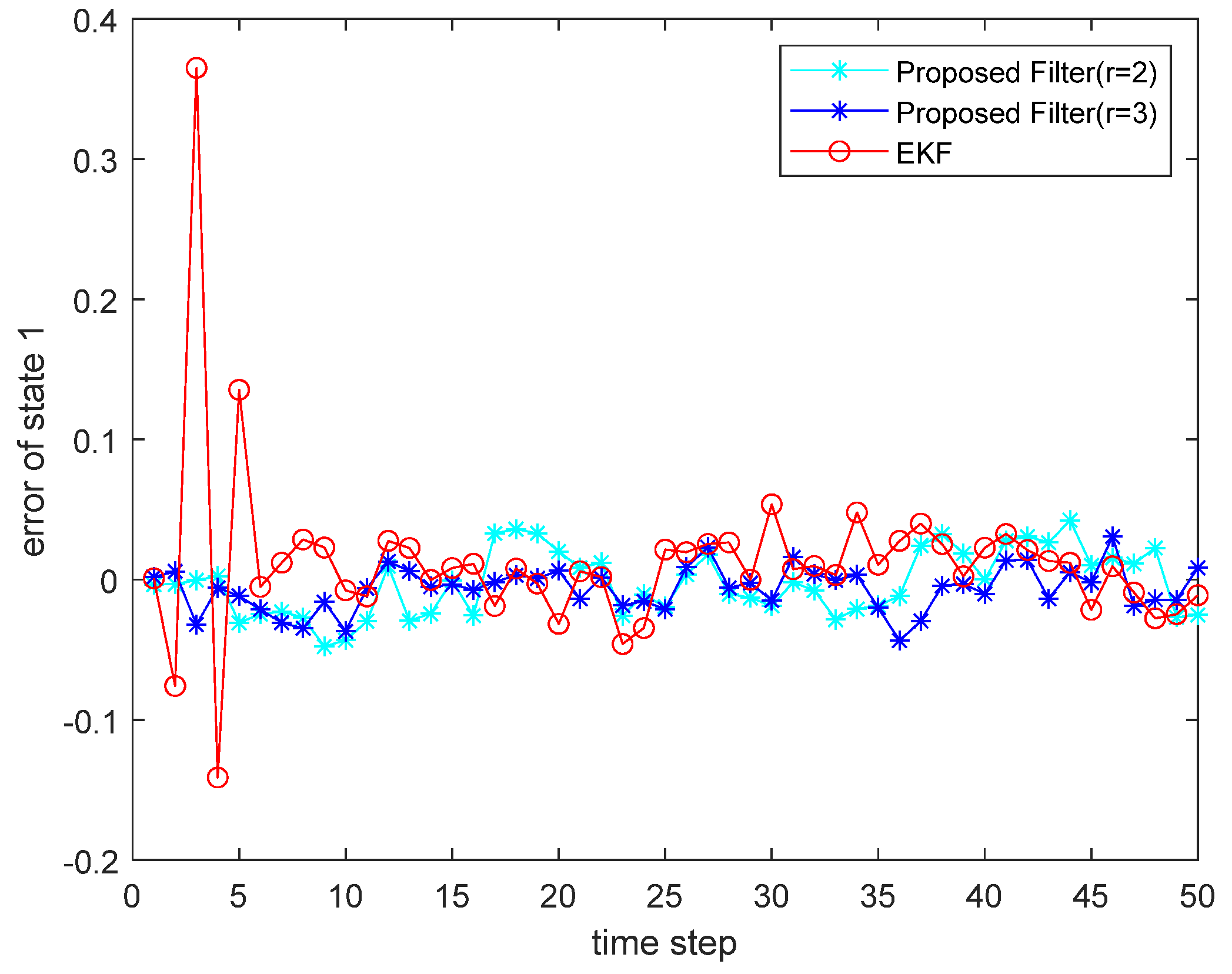
5.1. Case 1
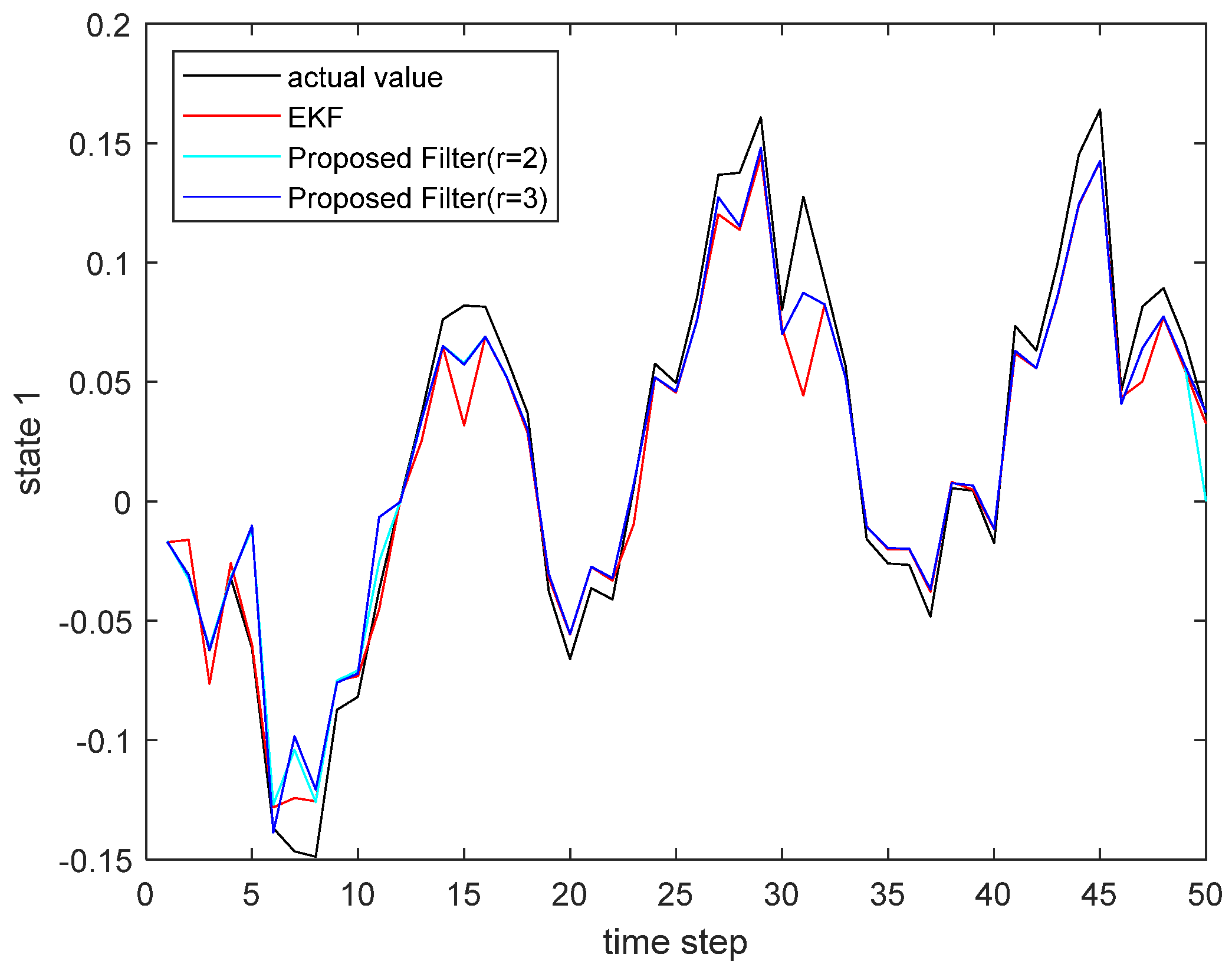
5.2. Case 2
5.3. Summary of Simulation Results
6. Conclusions and Future
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
Nomenclature
| state vector | |
| observation vector | |
| process noise | |
| measurement noise | |
| nonlinear state function | |
| nonlinear measurement function | |
| time step | |
| intermediate variable | |
| state estimate | |
| state prediction value | |
| measurement prediction value | |
| state prediction error covariance matrix | |
| estimate error covariance matrix | |
| Kalman gain matrix |
References
- Liu, Y.; Wang, Z.; He, X.; Zhou, D.-H. Filtering and fault detection for nonlinear systems with polynomial approximation. Automatica 2015, 54, 348–359. [Google Scholar] [CrossRef] [Green Version]
- Wen, T.; Xie, G.; Cao, Y.; Cai, B. A DNN-Based Channel Model for Network Planning in Train Control Systems. IEEE Trans. Intell. Transp. Syst. 2021. early access. [Google Scholar] [CrossRef]
- Wen, C.; Cheng, X.; Xu, D.; Wen, C. Filter design based on characteristic functions for one class of multi-dimensional nonlinear non-Gaussian systems. Automatica 2017, 82, 171–180. [Google Scholar] [CrossRef]
- Guo, L.; Wang, H. Minimum entropy filtering for multivariate stochastic systems with non-Gaussian noises. IEEE Trans. Autom. Control. 2006, 51, 695–700. [Google Scholar] [CrossRef]
- Xiaohui, S.; Chenglin, W.; Tao, W. A Novel Step-by-Step High-Order Extended Kalman Filter Design for a Class of Complex Systems with Multiple Basic Multipliers. Chin. J. Electron. 2021, 30, 313–321. [Google Scholar] [CrossRef]
- Ye, L.; Ma, X.; Wen, C. Rotating Machinery Fault Diagnosis Method by Combining Time-Frequency Domain Features and CNN Knowledge Transfer. Sensors 2021, 21, 8168. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. Trans. ASME—J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Sunahara, Y. An approximate method of state estimation for nonlinear dynamical systems. J. Basic Eng. 1970, 92, 385–393. [Google Scholar] [CrossRef]
- Wang, Q.; Sun, X.; Wen, C. Design Method for a Higher Order Extended Kalman Filter Based on Maximum Correlation Entropy and a Taylor Network System. Sensors 2021, 21, 5864. [Google Scholar] [CrossRef] [PubMed]
- Kim, T.; Park, T.-H. Extended Kalman filter (EKF) design for vehicle position tracking using reliability function of radar and lidar. Sensors 2020, 20, 4126. [Google Scholar] [CrossRef] [PubMed]
- Huang, J.; Li, D.; Zhang, C.; Li, H. Improved Kalman filter damage detection approach based on l(p) regularization. Struct. Control. Health Monit. 2019, 26, e2424. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef] [Green Version]
- Arasaratnam, I.; Haykin, S. Cubature kalman filters. IEEE Trans. Autom. Control. 2009, 54, 1254–1269. [Google Scholar] [CrossRef] [Green Version]
- Xie, X.; Zhou, D.; Jin, Y. Strong tracking filter based adaptive generic model control. J. Process Control. 1999, 9, 337–350. [Google Scholar] [CrossRef]
- Gao, B.; Gao, S.; Zhong, Y.; Hu, G.; Gu, C. Interacting Multiple Model Estimation-Based Adaptive Robust Unscented Kalman Filter. Int. J. Control. Autom. Syst. 2017, 15, 2013–2025. [Google Scholar] [CrossRef]
- Torben, K.; John, L. A New Continuous Discrete Unscented Kalman Filter. IEEE Trans. Autom. Control. 2019, 64, 2198–2205. [Google Scholar]
- Michalski, J.; Kozierski, P.; Zietkiewicz, J. Double hybrid Kalman filtering for state estimation of dynamical systems. ITM Web Conf. 2019, 28, 01051. [Google Scholar] [CrossRef]
- Yang, F.; Luo, Y.; Zheng, L. Double-Layer Cubature Kalman Filter for Nonlinear Estimation. Sensors 2019, 19, 986. [Google Scholar] [CrossRef] [Green Version]
- Xiaohui, S.; Tao, W.; Chenglin, W.; Xingshuo, C.; Yunkai, W. High-Order Extended Strong Tracking Filter. Chin. J. Electron. 2021, 30, 1152–1158. [Google Scholar] [CrossRef]
- Jan, S.; Xiaorong, X.; Liang, Y.; Yanhui, W.; Yongzhi, L. Monitoring of subsynchronous oscillation in a series-compensated wind power system using an adaptive extended Kalman filter. IET Renew. Power Gener. 2020, 14, 4193–4203. [Google Scholar]
- Yu, S.S.; Fan, X.; Chau, T.K.; Trinh, H.; Nahavandi, S. Square-Root Sigma-Point Filtering Approach to State Estimation for Wind Turbine Generators in Interconnected Energy Systems. IEEE Syst. J. 2021, 15, 1557–1566. [Google Scholar] [CrossRef]
- Jiang, Z.; Shi, Q.; Wei, Y.; Wei, H.; Gao, B.; He, L. An Immune Genetic Extended Kalman Particle Filter approach on state of charge estimation for lithium-ion battery. Energy 2021, 230, 120805. [Google Scholar]
- Zhibing, Z.; Jiudong, T.; Dong, L.; Yong, T. An Online State of Charge Estimation Algorithm for Lithium-Ion Batteries Using an Improved Adaptive Cubature Kalman Filter. Energies 2018, 11, 59. [Google Scholar]
- Fnadi, M.; Plumet, F.; Benamar, F. Nonlinear Tire Cornering Stiffness Observer for a Double Steering Off-Road Mobile Robot. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019. [Google Scholar]
- Fnadi, M.; Sandretto, J.; Ballet, G.; Pribourg, L. Guaranteed Identification of Viscous Friction for a Nonlinear Inverted Pendulum Through Interval Analysis and Set Inversion. In Proceedings of the 2021 American Control Conference (ACC), New Orleans, LA, USA, 26–28 May 2021. [Google Scholar]
- St-Pierre, M.; Gingras, D. Comparison between the unscented Kalman filter and the extended Kalman filter for the position estimation module of an integrated navigation information system. In Proceedings of the IEEE Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004; IEEE: Piscataway, NJ, USA, 2004; pp. 831–835. [Google Scholar]
- Garcia, R.; Pardal, P.; Kuga, H.; Zanardi, M. Nonlinear filtering for sequential spacecraft attitude estimation with real data: Cubature Kalman Filter, Unscented Kalman Filter and Extended Kalman Filter. Adv. Space Res. 2019, 63, 1038–1050. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, P.; Huang, G.; Zhang, Q.; Guo, J.; Zhao, Y. Performance analysis of indoor pseudolite positioning based on the unscented Kalman filter. GPS Solut. 2019, 23, 79. [Google Scholar] [CrossRef]
- Carravetta, F.; Germani, A.; Raimondi, N. Polynomial filtering of discrete-time stochastic linear systems with multiplicative state noise. IEEE Trans. Autom. Control. 1997, 42, 1106–1126. [Google Scholar] [CrossRef] [Green Version]
- Germani, A.; Manes, C.; Palumbo, P. Polynomial extended Kalman filter. IEEE Trans. Autom. Control. 2005, 50, 2059–2064. [Google Scholar] [CrossRef]
- Germani, A.; Manes, C.; Palumbo, P. Polynomial extended Kalman filtering for discrete-time nonlinear stochastic systems. In Proceedings of the 42nd IEEE International Conference on Decision and Control (IEEE Cat. No. 03CH37475), Maui, HI, USA, 9–12 December 2003; IEEE: Piscataway, NJ, USA, 2003; Volume 1, pp. 886–891. [Google Scholar]
- Xiaohui, S.; Chenglin, W.; Tao, W. High-Order Extended Kalman Filter Design for a Class of Complex Dynamic Systems with Polynomial Nonlinearities. Chin. J. Electron. 2021, 30, 508–515. [Google Scholar] [CrossRef]
- Liu, H.; Hu, F.; Su, J.; Wei, X.; Qin, R. Comparisons on Kalman-Filter-Based dynamic state estimation algorithms of power systems. IEEE Access 2020, 8, 51035–51043. [Google Scholar] [CrossRef]
- Wen, C.; Ge, Q.; Cheng, X.; Xu, D. Filters design based on multiple characteristic functions for the grinding process cylindrical workpieces. IEEE Trans. Ind. Electron. 2017, 64, 4671–4679. [Google Scholar] [CrossRef]
- Xiaohui, S.; Chenglin, W.; Tao, W. Maximum Correntropy High-Order Extended Kalman Filter. Chin. J. Electron. 2022, 31, 190–198. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EKF | Proposed Filter (r = 2) | Proposed Filter (r = 3) | ||
|---|---|---|---|---|
| MSE of | ||||
| MSE of | ||||
| MSE of | ||||
| Improved (%) | × | 14.34% | 52.93% | |
| × | 39.06% | −18.02% | ||
| Improved of (%) | × | 21.50% | 34.15% | |
| Improved relative to EKF (%) | × | 14.34% | 59.68% | |
| × | 39.06% | 24.54% | ||
| Improved of (%) | × | 21.50% | 48.31% | |
| EKF | Proposed Filter (r = 2) | Proposed Filter (r = 3) | ||
|---|---|---|---|---|
| MSE of | ||||
| MSE of | ||||
| MSE of | ||||
| Improved (%) | × | 45.30% | 20.31% | |
| × | 83.76% | 0% | ||
| Improved of (%) | × | 74.85% | 10.24% | |
| Improved relative to EKF (%) | × | 45.30% | 59.41% | |
| × | 83.76% | 83.76% | ||
| Improved of (%) | × | 74.85% | 77.43% | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Wen, C.; Sun, X. Design Method of High-Order Kalman Filter for Strong Nonlinear System Based on Kronecker Product Transform. Sensors 2022, 22, 653. https://doi.org/10.3390/s22020653
Liu X, Wen C, Sun X. Design Method of High-Order Kalman Filter for Strong Nonlinear System Based on Kronecker Product Transform. Sensors. 2022; 22(2):653. https://doi.org/10.3390/s22020653
Chicago/Turabian StyleLiu, Xiaohan, Chenglin Wen, and Xiaohui Sun. 2022. "Design Method of High-Order Kalman Filter for Strong Nonlinear System Based on Kronecker Product Transform" Sensors 22, no. 2: 653. https://doi.org/10.3390/s22020653
APA StyleLiu, X., Wen, C., & Sun, X. (2022). Design Method of High-Order Kalman Filter for Strong Nonlinear System Based on Kronecker Product Transform. Sensors, 22(2), 653. https://doi.org/10.3390/s22020653