
Carbon Black/PDMS Based Flexible Capacitive Tactile Sensor for Multi-Directional Force Sensing


Abstract
:1. Introduction
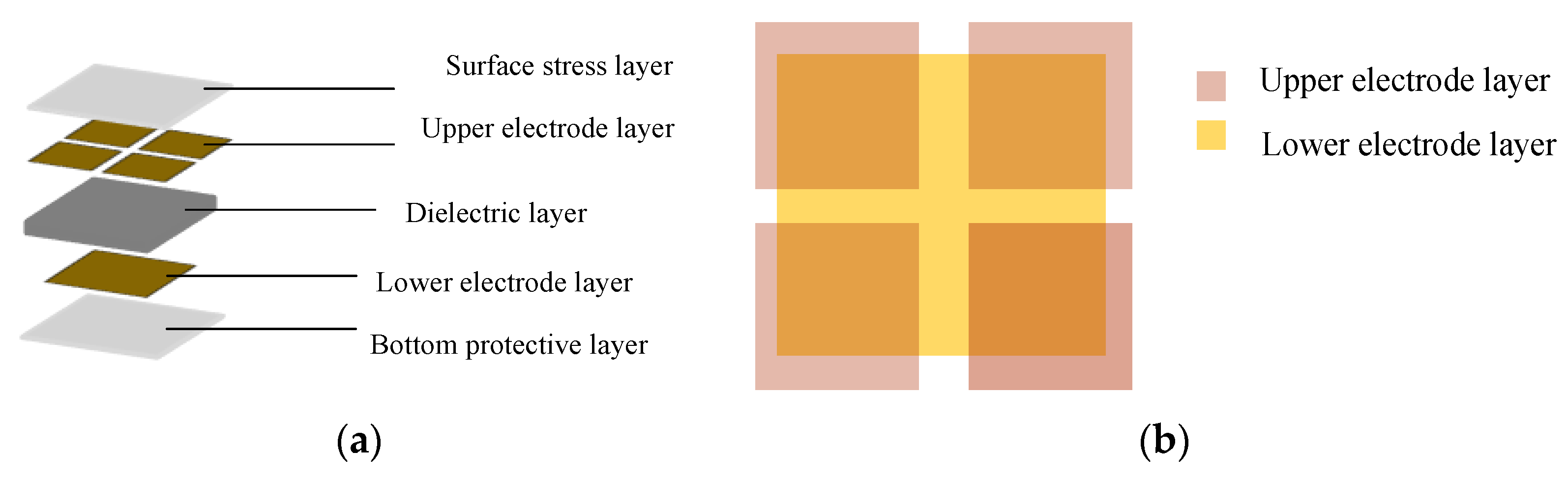
2. Working Principle of Capacitive Tactile Sensors
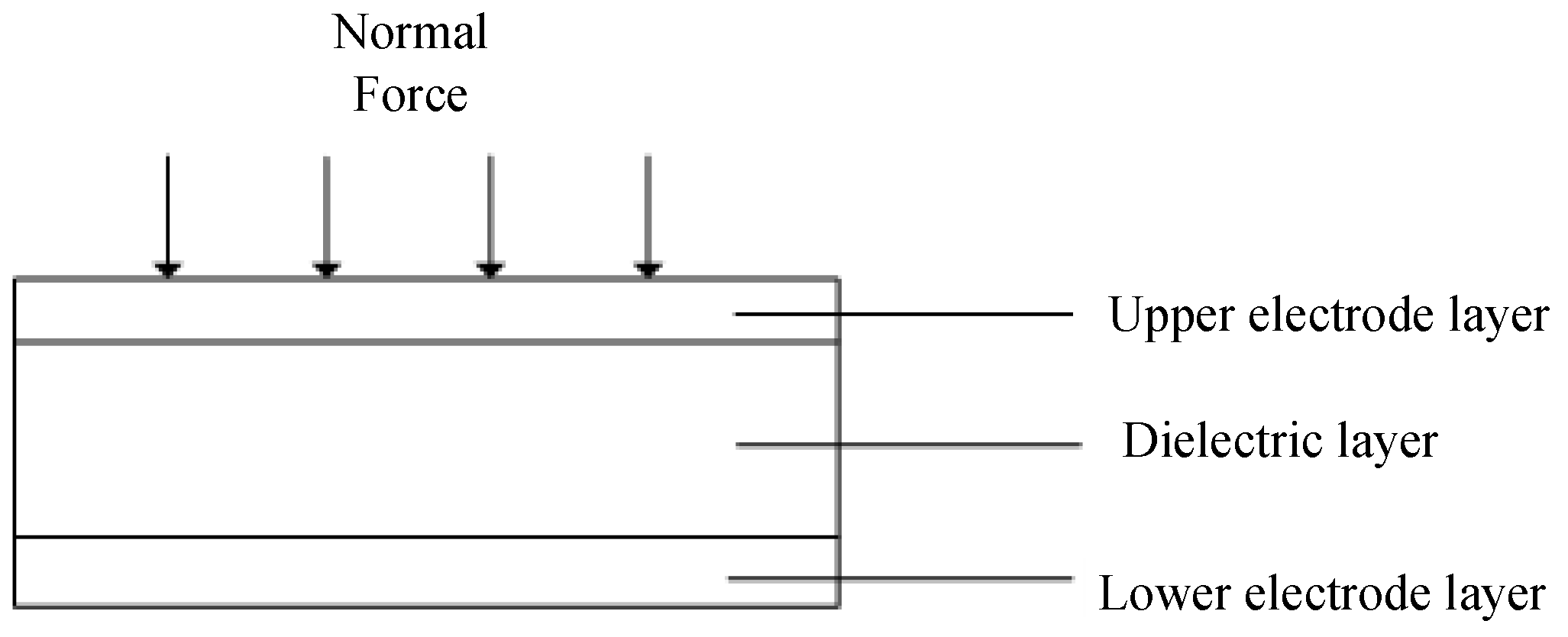
2.1. Working Principle of Normal Force
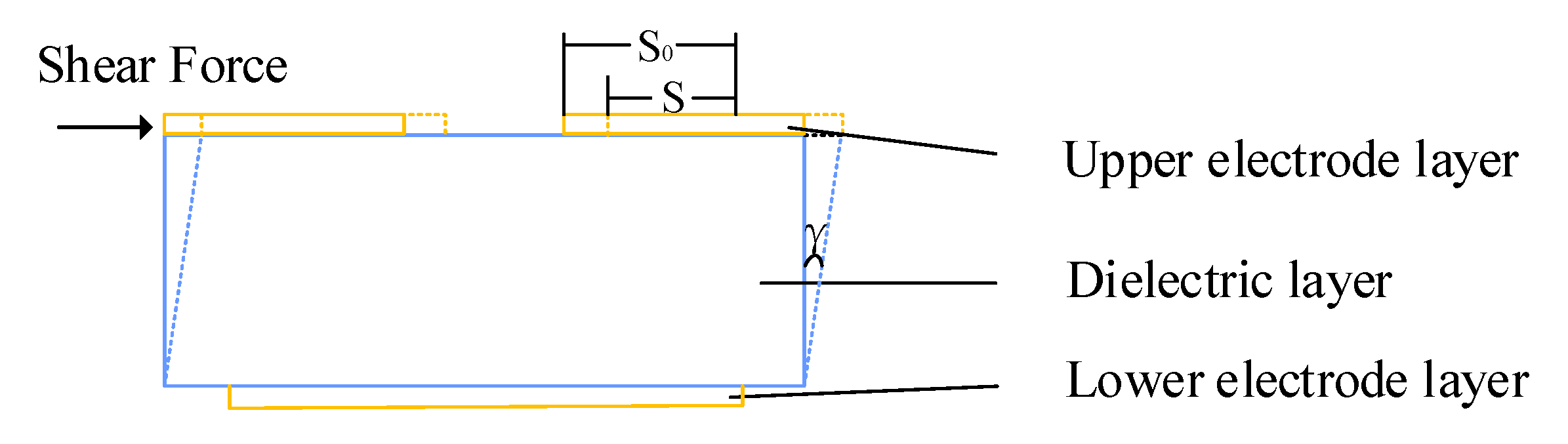
2.2. Working Principle of Tangential Force
3. Fabrication Process of the Soft Capacitive Sensor
3.1. Preparation of Electrode Layer
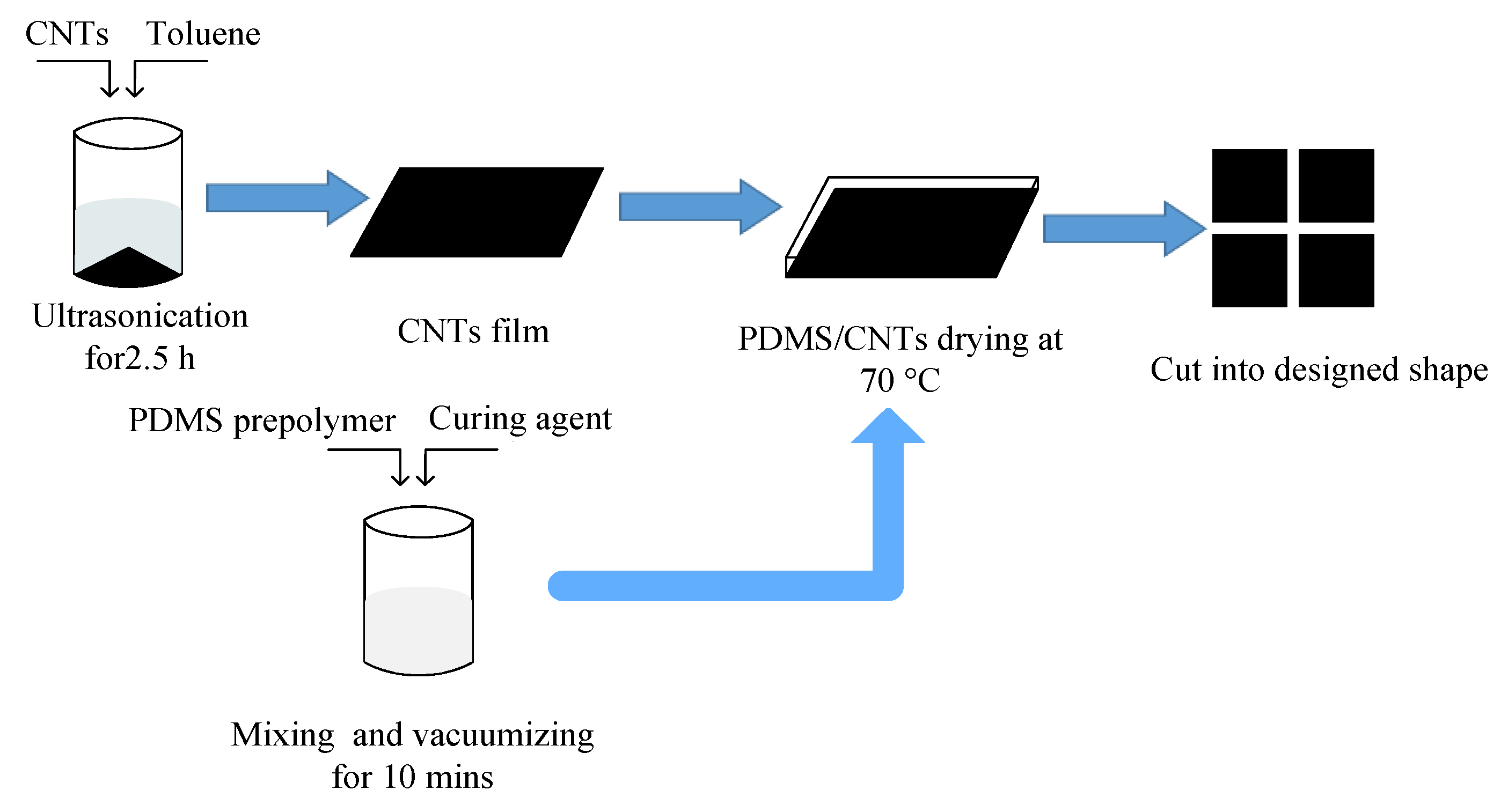
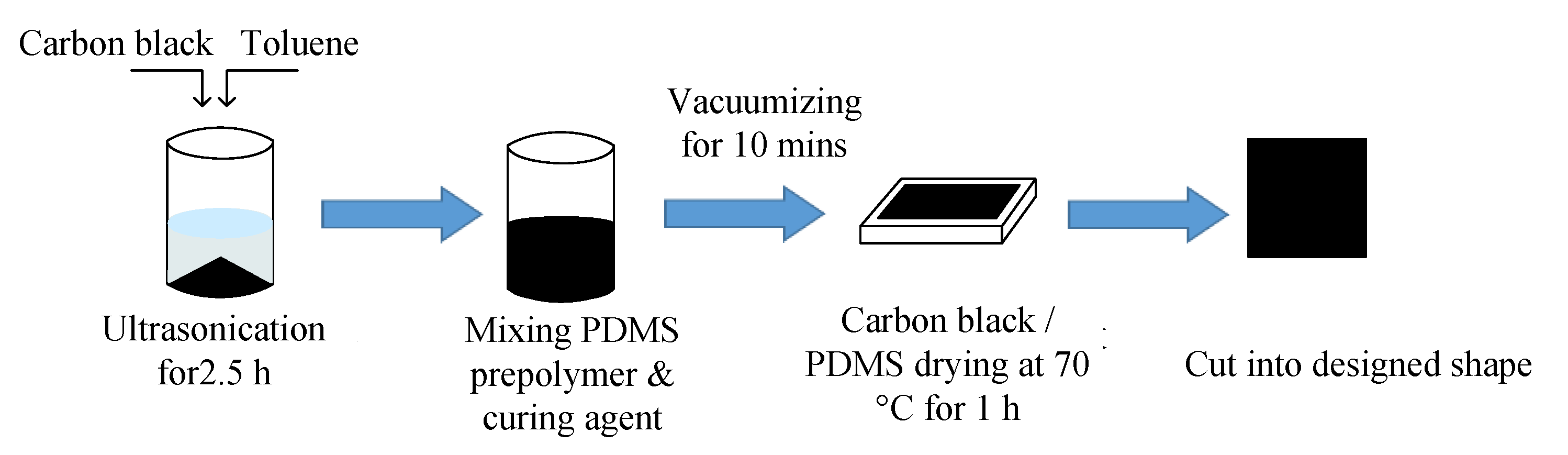
3.2. Preparation of Dielectric Layer
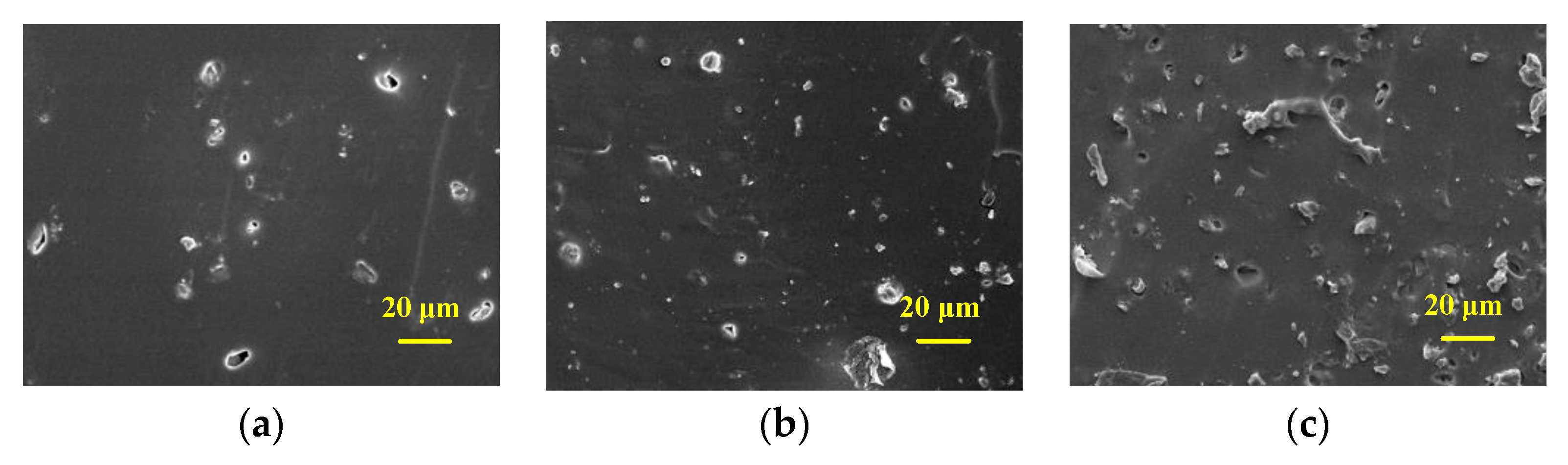
3.3. Morphology Characterization
3.4. Dielectric Constant Test
3.5. Preparation of Surface Stress Layer
3.6. Assembly of Sensor
4. Experimental Setup
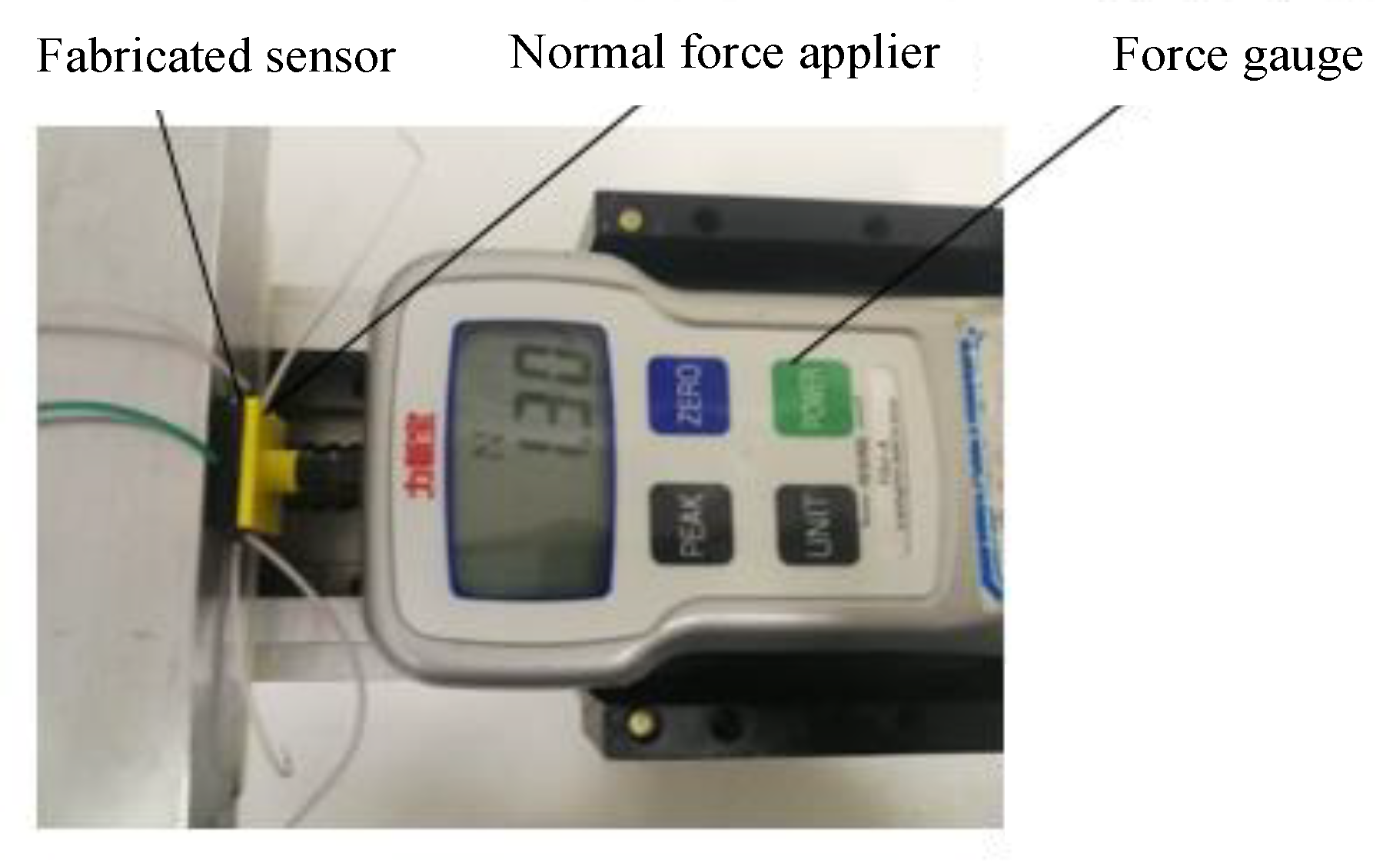
4.1. Measurement Experiment of Sensor Normal Force
4.2. Experiment on Measuring Tangential Force of Sensor
5. Results and Discussion
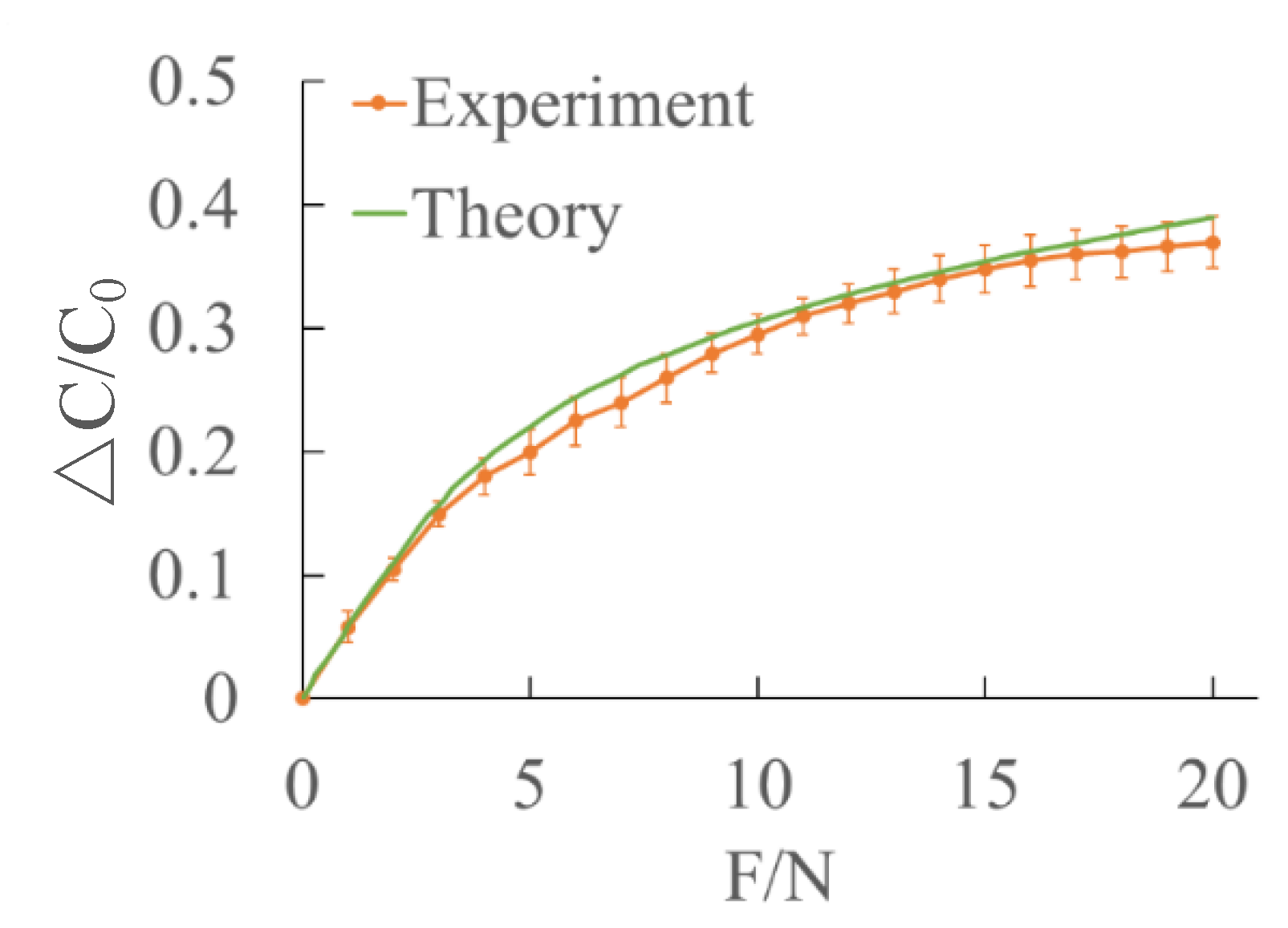
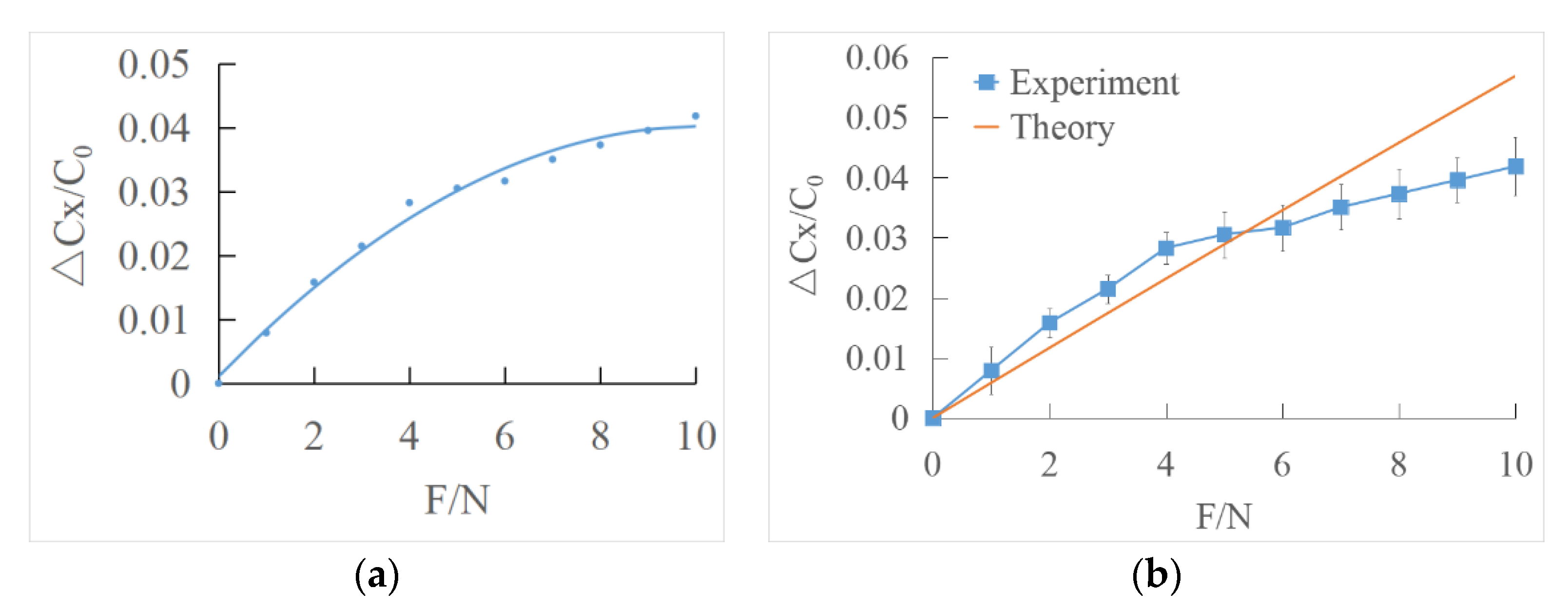
5.1. Sensitivity of Sensor
5.2. Fatigue of Sensor
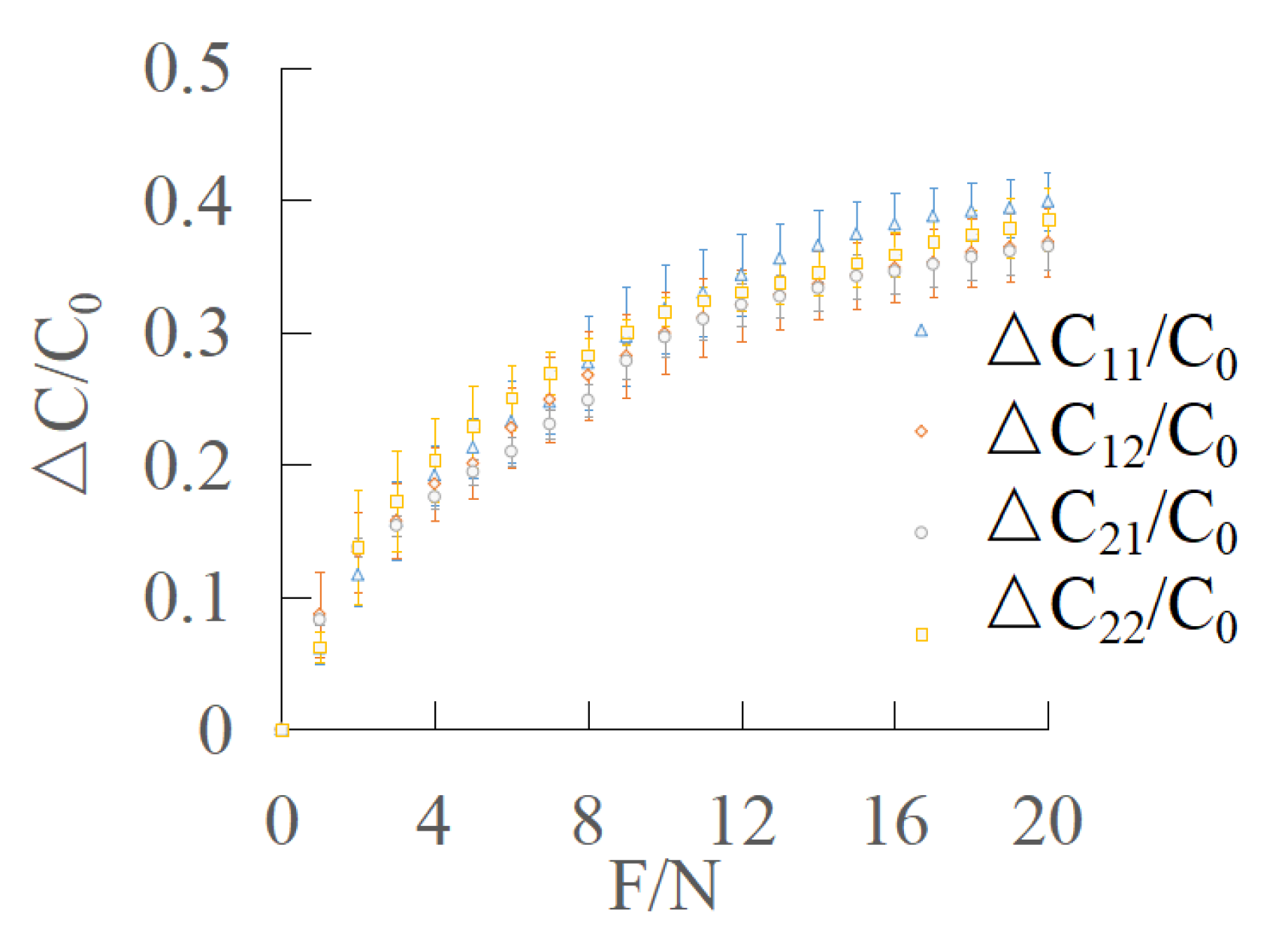
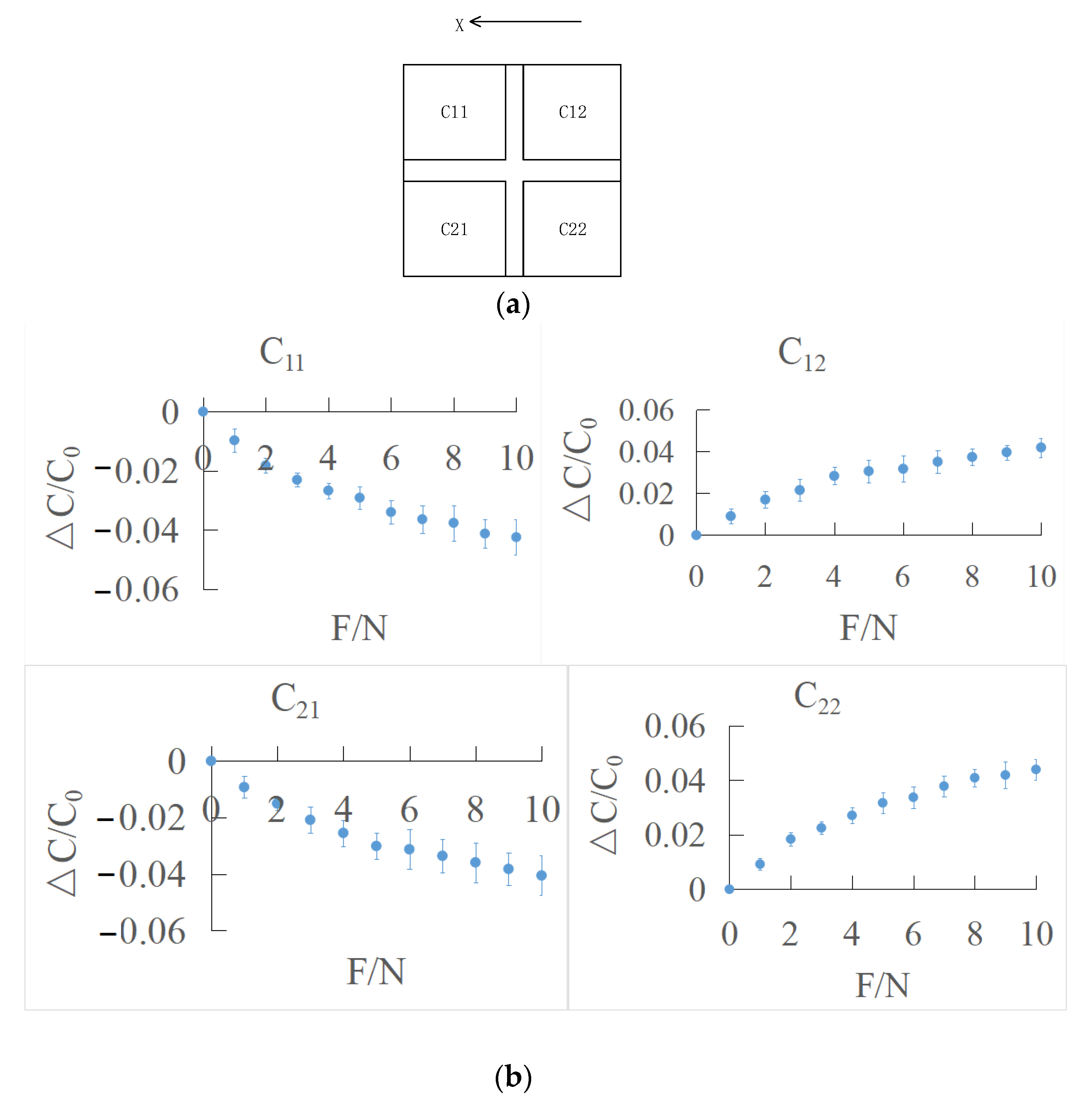
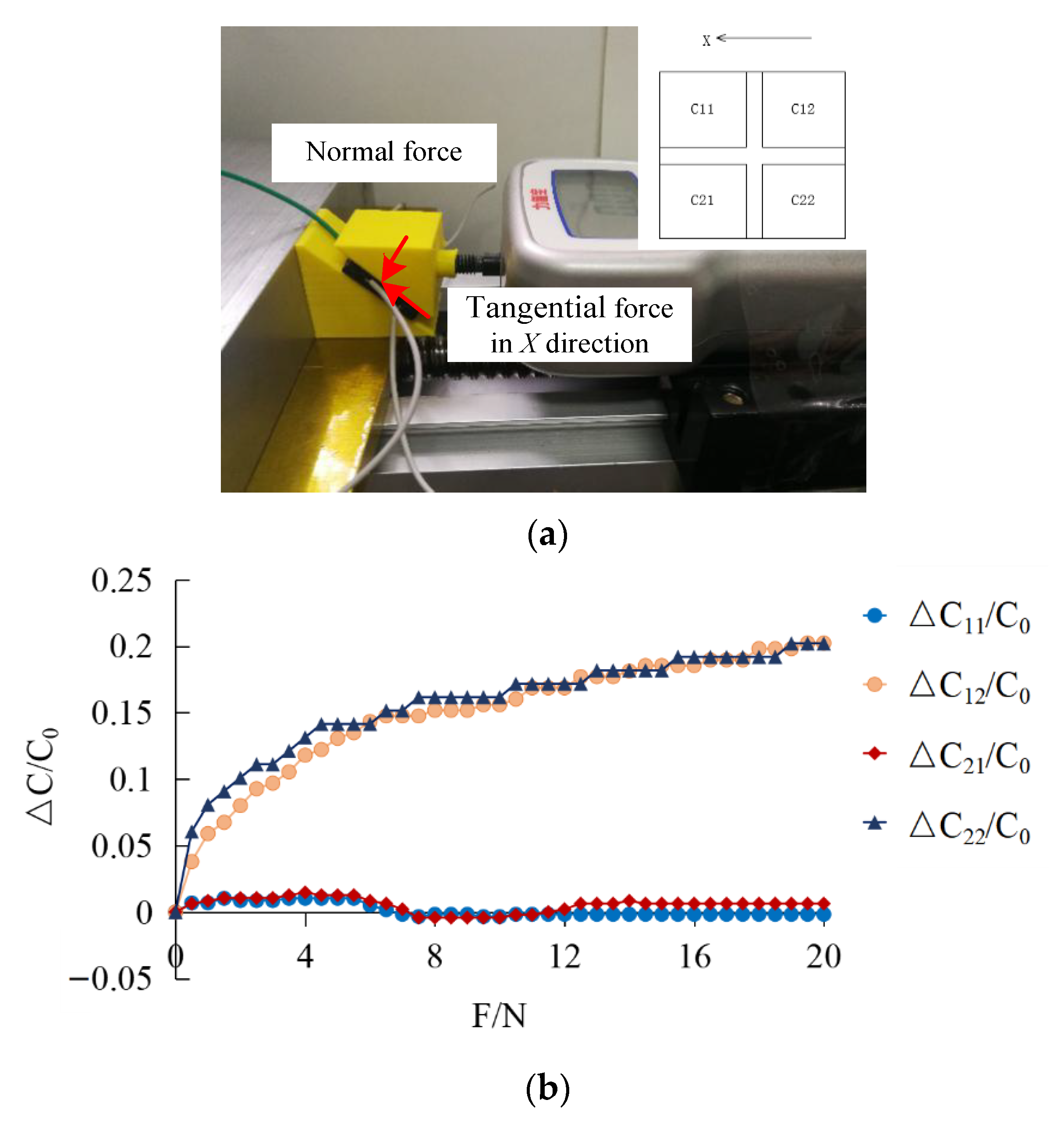
5.3. The Test of Multidirectional Force
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wu, Q.; Qiao, Y.; Guo, R.; Naveed, S.; Hirtz, T.; Li, X.; Fu, Y.; Wei, Y.; Deng, G.; Yang, Y.; et al. Triode-mimicking graphene pressure sensor with positive resistance variation for physiology and motion monitoring. ACS Nano 2020, 14, 10104–10114. [Google Scholar] [CrossRef]
- Wang, S.; Oh, J.Y.; Xu, J.; Tran, H.; Bao, Z. Skin-inspired electronics: An emerging paradigm. Acc. Chem. Res. 2018, 51, 1033–1045. [Google Scholar] [CrossRef] [PubMed]
- Son, D.; Bao, Z. Nanomaterials in skin-inspired electronics: Toward soft and robust skin-like electronic nanosystems. ACS Nano 2018, 12, 11731. [Google Scholar] [CrossRef]
- Surapaneni, R.; Xie, Y.; Guo, Q.; Young, D.J.; Mastrangelo, C.H. A high-resolution flexible tactile imager system based on floating comb electrodes. In Proceedings of the 2012 IEEE Sensors, Taipei, Taiwan, 28–31 October 2012. [Google Scholar]
- Tang, Z.; Jia, S.; Zhou, C. 3D Printing of Highly Sensitive and Large-measurement-range flexible pressure sensors with a positive piezoresistive effect. ACS Appl. Mater. Interfaces 2020, 12, 28669–28680. [Google Scholar] [CrossRef]
- Zhang, Q.; Lei, J.; Chen, Y.; Wu, Y.; Xiao, H. Glass 3D printing of microfluidic pressure sensor interrogated by fiber-optic refractometry. IEEE Photonics Technol. Lett. 2020, 32, 414–417. [Google Scholar] [CrossRef]
- Gu, Y.; Zhang, T.; Chen, H.; Wang, F.; Pu, Y.; Gao, C.; Li, S. Mini review on flexible and wearable electronics for monitoring human health information. Nanoscale Res. Lett. 2019, 14, 263. [Google Scholar] [CrossRef] [Green Version]
- Ho, J.J. The design and fabrication of a micro-thermal/pressure-sensor for medical electro-skin application. Solid-State Electron. 2002, 46, 1205–1209. [Google Scholar] [CrossRef]
- Park, J.; Kim, J.K.; Patil, S.J.; Park, J.-K.; Park, S.; Lee, D.-W. A wireless pressure sensor integrated with a biodegradable polymer stent for biomedical applications. Sensors 2016, 16, 809. [Google Scholar] [CrossRef] [Green Version]
- Ahmadi, M.; Zhang, Y.; Rajamani, R.; Timm, G.; Sezen, A.S. A super-capacitive pressure sensor for a urethral catheter. Conf. Proc. IEEE Eng. Med. Biol. Soc. 2018, 2018, 1–3. [Google Scholar]
- Larson, C.; Peele, B.; Li, S.; Robinson, S.; Totaro, M.; Beccai, L.; Mazzolai, B.; Shepherd, R. Highly stretchable electroluminescent skin for optical signaling and tactile sensing. Science 2016, 351, 1071–1074. [Google Scholar] [CrossRef] [Green Version]
- Wu, B.; Siyu, Z.; Shi, H.; Lu, R.; Yan, B.; Ma, S.; Markert, B. Viscoelastic properties of human periodontal ligament: Effects of the loading frequency and location. Angle Orthod. 2019, 3, 480–487. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lai, Y.; Chen, Y.; Yang, Y.J. A novel CNT-PDMS-based tactile sensing array with resistivity retaining and recovering by using dielectrophoresis effect. J. Microelectromechan. Syst. 2012, 21, 217–223. [Google Scholar] [CrossRef]
- Wang, L.; Li, Y. A review for conductive polymer piezoresistive composites and a development of a compliant pressure transducer. IEEE Trans. Instrum. Meas. 2013, 62, 495–502. [Google Scholar] [CrossRef]
- Tee, B.C.; Wang, C.; Allen, R.; Bao, Z. An electrically and mechanically self-healing composite with pressure- and flexion-sensitive properties for electronic skin applications. Nat. Nanotechnol. 2012, 7, 825–832. [Google Scholar] [CrossRef]
- Canavese, G. Different scale confinements of PVDF-TrFE as functional material of piezoelectric devices. IEEE Sens. J. 2013, 13, 2237–2244. [Google Scholar] [CrossRef]
- Seminara, L.; Pinna, L.; Valle, M.; Basirico, L.; Loi, A.; Cosseddu, P.; Bonfiglio, A.; Ascia, A.; Biso, M.; Ansaldo, A.; et al. Piezoelectric polymer transducer arrays for flexible tactile sensors. IEEE Sens. J. 2013, 13, 4022–4029. [Google Scholar] [CrossRef]
- Lee, H.; Chang, S.; Yoon, E. A flexible polymer tactile sensor: Fabrication and modular expandability for large area deployment. J. Microelectromech. Syst. 2006, 15, 1681–1686. [Google Scholar] [CrossRef]
- Wang, Y.C.; Chen, T.Y.; Chen, R.; Lo, C.-Y. Mutual capacitive flexible tactile sensor for 3-D image control. J. Microelectromech. Syst. 2013, 22, 804–814. [Google Scholar] [CrossRef]
- Ahmadi, R.; Packirisamy, M.; Dargahi, J.; Cecere, R. Discretely loaded beam-type optical fiber tactile sensor for tissue manipulation and palpation in minimally invasive robotic surgery. IEEE Sens. J. 2011, 12, 22–32. [Google Scholar] [CrossRef]
- Kaltenbrunner, M.; Sekitani, T.; Reeder, J.; Yokota, T.; Kuribara, K.; Tokuhara, T.; Drack, M.; Schwödiauer, R.; Graz, I.; Bauer-Gogonea, S.; et al. An ultra-lightweight design for imperceptible plastic electronics. Nature 2013, 499, 458–463. [Google Scholar] [CrossRef]
- Wu, W.; Wen, X.; Wang, Z.L. Taxel-addressable matrix of vertical-nanowire piezotronic transistors for active and adaptive tactile imaging. Science 2013, 340, 952–957. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liang, G.; Wang, Y.; Mei, D.; Xi, K.; Chen, Z. Flexible capacitive tactile sensor array with truncated pyramids as dielectric layer for three-axis force measurement. J. Microelectromech. Syst. 2015, 24, 1510–1519. [Google Scholar] [CrossRef]
- Jung, Y.; Lee, W.; Jung, K.; Park, B.; Park, J.; Ko, J.; Cho, H. A highly sensitive and flexible capacitive pressure sensor based on a porous three-dimensional PDMS/microsphere composite. Polymers 2020, 12, 1412. [Google Scholar] [CrossRef] [PubMed]
- Hu, X.H.; Zhang, X.; Liu, M.; Chen, Y.; Li, P.; Pei, W.; Zhang, C.; Chen, H. A flexible capacitive tactile sensor array with micro structure for robotic application. Sci. China Inf. Sci. 2014, 57, 1–6. [Google Scholar] [CrossRef]
- Ji, Z.; Zhu, H.; Liu, H.; Liu, N.; Chen, T.; Yang, Z.; Sun, L. The design and characterization of a flexible tactile sensing array for robot skin. Sensors 2016, 16, 2001. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Xu, B. Novel highly sensitive and wearable pressure sensors from conductive three-dimensional fabric structures. Smart Mater. Struct. 2015, 24, 125022. [Google Scholar] [CrossRef]
- Wang, L.; You, J.; Yang, X.; Chen, H.; Li, C.; Wu, H. Forward and inverse dynamics of a six-axis accelerometer based on a parallel mechanism. Sensors 2021, 21, 233. [Google Scholar] [CrossRef]
- Schwartz, G.; Tee BC, K.; Mei, J.; Appleton, A.L.; Kim, D.H.; Wang, H.; Bao, Z. Flexible polymer transistors with high pressure sensitivity for application in electronic skin and health monitoring. Nat. Commun. 2013, 4, 1859. [Google Scholar] [CrossRef]
- Yao, T.; Guo, X.; Li, C.; Qi, H.; Lin, H.; Liu, L.; Dai, Y.; Qu, L.; Huang, Z.; Liu, P.; et al. Highly sensitive capacitive flexible 3D-force tactile sensors for robotic grasping and manipulation. J. Phys. D Appl. Phys. 2020, 53, 445109. [Google Scholar] [CrossRef]
- Viry, L.; Levi, A.; Totaro, M.; Mondini, A.; Mattoli, V.; Mazzolai, B.; Beccai, L. Flexible three-axial force sensor for soft and highly sensitive artificial touch. Adv. Mater. 2014, 26, 2659–2664. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Fan, S.; Jiang, L.I.; Liu, H. Development and experiment analysis of anthropomorphic prosthetic hand with flexible three-axis tactile sensor. Int. J. Hum. Robot. 2013, 10, 222–296. [Google Scholar] [CrossRef]
- Brookhuis, R.A.; Wiegerink, R.J.; Lammerink, T.S.J.; Krijnen, G.J. Three-axial force sensor with capacitive read-out using a differential relaxation oscillator. In Proceedings of the Sensors, IEEE Conference, Baltimore, MD, USA, 3–6 November 2013. [Google Scholar]
- Jang, J.; Jun, Y.S.; Seo, H.; Kim, M.; Park, J. Motion detection using tactile sensors based on pressure-sensitive transistor arrays. Sensors 2020, 20, 3624. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Lou, Y.; Wang, B.; Sun, Q.; Zhou, M.; Li, X. Highly sensitive, breathable, and flexible pressure sensor based on electrospun membrane with assistance of AgNW/TPU as composite dielectric layer. Sensors 2020, 20, 2459. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Feng, S.; Ma, Q. Kinetics of the thermal degradation and thermal stability of conductive silicone rubber filled with conductive carbon black. Appl. Polym. Sci. 2003, 89, 1548–1554. [Google Scholar] [CrossRef]
- Guo, X.; Huang, Y.; Wu, C.; Mao, L.; Wang, Y.; Xie, Z.; Liu, C.; Zhang, Y. Flexible and reversibly deformable radio-frequency antenna based on stretchable SWCNTs/PANI/Lycra conductive fabric. Smart Mater. Struct. 2017, 26, 105036. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, M.Y. Multi-axis soft sensors based on dielectric elastomer. Soft. Robot. 2016, 3, 3–12. [Google Scholar] [CrossRef]
- Tsouti, V.; Mitrakos, V.; Broutas, P.; Chatzandroulis, S. Modeling and development of a flexible carbon black-based capacitive strain sensor. IEEE Sens. J. 2016, 16, 3059–3067. [Google Scholar] [CrossRef]
- Guo, X.; Huang, Y.; Cai, X.; Liu, C.; Liu, P. Capacitive wearable tactile sensor based on smart textile substrate with carbon black /silicone rubber composite dielectric. Meas. Sci. Technol. 2016, 27, 045105. [Google Scholar] [CrossRef]
- Xia, Y.; Zhang, Q.; Wu, X.E.; Kirk, T.V.; Chen, X.D. Practical and durable flexible strain sensors based on conductive carbon black and silicone blends for large scale motion monitoring applications. Sensors 2019, 19, 4553. [Google Scholar] [CrossRef] [Green Version]
- Roberts, P.; Damian, D.D.; Shan, W.; Lu, T.; Majidi, C. Soft-matter capacitive sensor for measuring shear and pressure deformation. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3529–3534. [Google Scholar] [CrossRef]
- Nie, B.; Geng, J.; Yao, T.; Miao, Y.; Zhang, Y.; Chen, X.; Liu, J. Sensing arbitrary contact forces with a flexible porous dielectric elastomer. Mater. Horiz. 2021, 8, 962–971. [Google Scholar] [CrossRef]
- Sun, X.; Sun, J.; Li, T.; Zheng, S.; Wang, C.; Tan, W.; Zhang, J.; Liu, C.; Ma, T.; Qi, Z.; et al. Flexible tactile electronic skin sensor with 3D force detection based on porous CNTs/PDMS nanocomposites. Nano-Micro Lett. 2019, 11, 57. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Thanakhun, K.; Puttapitukporn, T. PDMS material models for anti-fouling surfaces using finite element method. Eng. J. 2019, 23, 381–398. [Google Scholar] [CrossRef]
- Phothiphatcha, J.; Puttapitukporn, T. Determination of material parameters of PDMS material models by MATLAB. Eng. J. 2021, 25, 11–28. [Google Scholar] [CrossRef]
- Qu, Y.P.; Tung, N.D.; Page, A.G.; Yan, W.; Das Gupta Rotaru, G.M.; Rossi, R.M.; Favrod, V.D.; Bartolomei, N.; Sorin, F. Superelastic multimaterial electronic and photonic fibers and devices via thermal drawing. Adv. Mater. 2018, 30, 1707251. [Google Scholar] [CrossRef]
- Yan, W.; Dong, C.Q.; Xiang, Y.Z.; Jiang, S.; Leber, A.; Loke, G.; Xu, W.X.; Hou, C.; Zhou, S.F.; Chen, M.; et al. Thermally drawn advanced functional fibers: New frontier of flexible electronics. Mater. Today 2020, 35, 168–194. [Google Scholar] [CrossRef]
- Fu, X.; Zhang, J.Q.; Xiao, J.L.; Kang, Y.; Yu, L.; Jiang, C.; Pan, Y.; Dong, H.; Gao, S.; Wang, Y. A high-resolution, ultrabroad-range and sensitive capacitive tactile sensor based on a CNT/PDMS composite for robotic hands. Nanoscale 2021, 13, 18780–18788. [Google Scholar] [CrossRef]
- Ke, K.; Mcmaster, M.; Christopherson, W.; Singer, K.D.; Manas-Zloczower, I. Highly sensitive capacitive pressure sensors based on elastomer composites with carbon filler hybrids. Compos. Part A Appl. Sci. Manuf. 2019, 126, 105614. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FORCE/N | Standard Deviation (C11) | Standard Deviation (C12) | Standard Deviation (C21) | Standard Deviation (C22) |
|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 |
| 1 | 0.0123 | 0.0317 | 0.0344 | 0.0116 |
| 2 | 0.0233 | 0.0304 | 0.0286 | 0.0435 |
| 3 | 0.0301 | 0.0286 | 0.0312 | 0.0382 |
| 4 | 0.0229 | 0.0272 | 0.0327 | 0.0318 |
| 5 | 0.0226 | 0.0270 | 0.0272 | 0.0310 |
| 6 | 0.0313 | 0.0301 | 0.0300 | 0.0241 |
| 7 | 0.0243 | 0.0317 | 0.0275 | 0.0164 |
| 8 | 0.0356 | 0.0335 | 0.0132 | 0.0128 |
| 9 | 0.0370 | 0.0312 | 0.0198 | 0.0094 |
| 10 | 0.0331 | 0.0312 | 0.0230 | 0.0114 |
| 11 | 0.0327 | 0.0297 | 0.0257 | 0.0105 |
| 12 | 0.0308 | 0.0271 | 0.0249 | 0.0137 |
| 13 | 0.0268 | 0.0258 | 0.0252 | 0.0155 |
| 14 | 0.0268 | 0.0259 | 0.0250 | 0.0174 |
| 15 | 0.0249 | 0.0255 | 0.0250 | 0.0181 |
| 16 | 0.0231 | 0.0257 | 0.0243 | 0.0169 |
| 17 | 0.0211 | 0.0258 | 0.0231 | 0.0163 |
| 18 | 0.0211 | 0.0259 | 0.0240 | 0.0181 |
| 19 | 0.0216 | 0.0260 | 0.0254 | 0.0223 |
| 20 | 0.0216 | 0.0260 | 0.0255 | 0.0237 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Y.; Chen, X.; Chu, K.; Wang, X.; Hu, Z.; Su, H. Carbon Black/PDMS Based Flexible Capacitive Tactile Sensor for Multi-Directional Force Sensing. Sensors 2022, 22, 628. https://doi.org/10.3390/s22020628
Zhu Y, Chen X, Chu K, Wang X, Hu Z, Su H. Carbon Black/PDMS Based Flexible Capacitive Tactile Sensor for Multi-Directional Force Sensing. Sensors. 2022; 22(2):628. https://doi.org/10.3390/s22020628
Chicago/Turabian StyleZhu, Yinlong, Xin Chen, Kaimei Chu, Xu Wang, Zhiqiang Hu, and Haijun Su. 2022. "Carbon Black/PDMS Based Flexible Capacitive Tactile Sensor for Multi-Directional Force Sensing" Sensors 22, no. 2: 628. https://doi.org/10.3390/s22020628
APA StyleZhu, Y., Chen, X., Chu, K., Wang, X., Hu, Z., & Su, H. (2022). Carbon Black/PDMS Based Flexible Capacitive Tactile Sensor for Multi-Directional Force Sensing. Sensors, 22(2), 628. https://doi.org/10.3390/s22020628