
Impact of a Turbulent Ocean Surface on Laser Beam Propagation


Abstract
1. Introduction
2. Ocean Wave Considerations
2.1. Monochromatic Capillary–Gravity Waves
- The first classification is with respect to the depth through the size of . For ≫ 1, 1, the effects of depth are neglected, and the result is “deep-water waves’’, also called “short waves’’. For these waves, is a function of wavenumber, so waves with different wavelengths travel at different speeds. Thus, deep-water waves are dispersive waves. The waves discussed in this paper are deep-water waves. For ≪1, , and the results are “shallow-water waves”, also called “long-waves’’. For these waves, is approximately independent of wavenumber. Thus, shallow-water waves are approximately non-dispersive. For 1, there is no approximation on . Such waves are dispersive.
- The second classification is with respect to the Bond number [17]:which measures the relative importance of capillary forces versus gravitational forces. For = 1 (using and ), the wavelength is a critical value of 1.71 cm, and the two restoring forces balance. This wavelength corresponds to the minimum phase speed of about = 23.1 cm/s for deep-water waves. For 1, the wavelengths are shorter than the critical value, and capillary forces dominate. The dispersion relation for these capillary waves is well approximated by:For 1, the wavelengths are longer than the critical value, and gravitational forces dominate. The dispersion relation for these gravity waves is well approximated by:
- A third classification takes into account weak nonlinearity. In particular, Equation (6) holds when the wave slope is very small, → 0. If one allows for finite but weak nonlinearity so that ≪ 1, one finds that capillary–gravity waves and capillary waves may spread energy spectrally through resonant triad and quartet interactions as well as modulational instabilities [18]. Gravity waves on finite depth or deep water spread energy through modulational instabilities and resonant quartet interactions. Thus, even in the absence of wind, these instabilities and interactions may cause complicated two-dimensional surface patterns [19] from freely propagating waves.
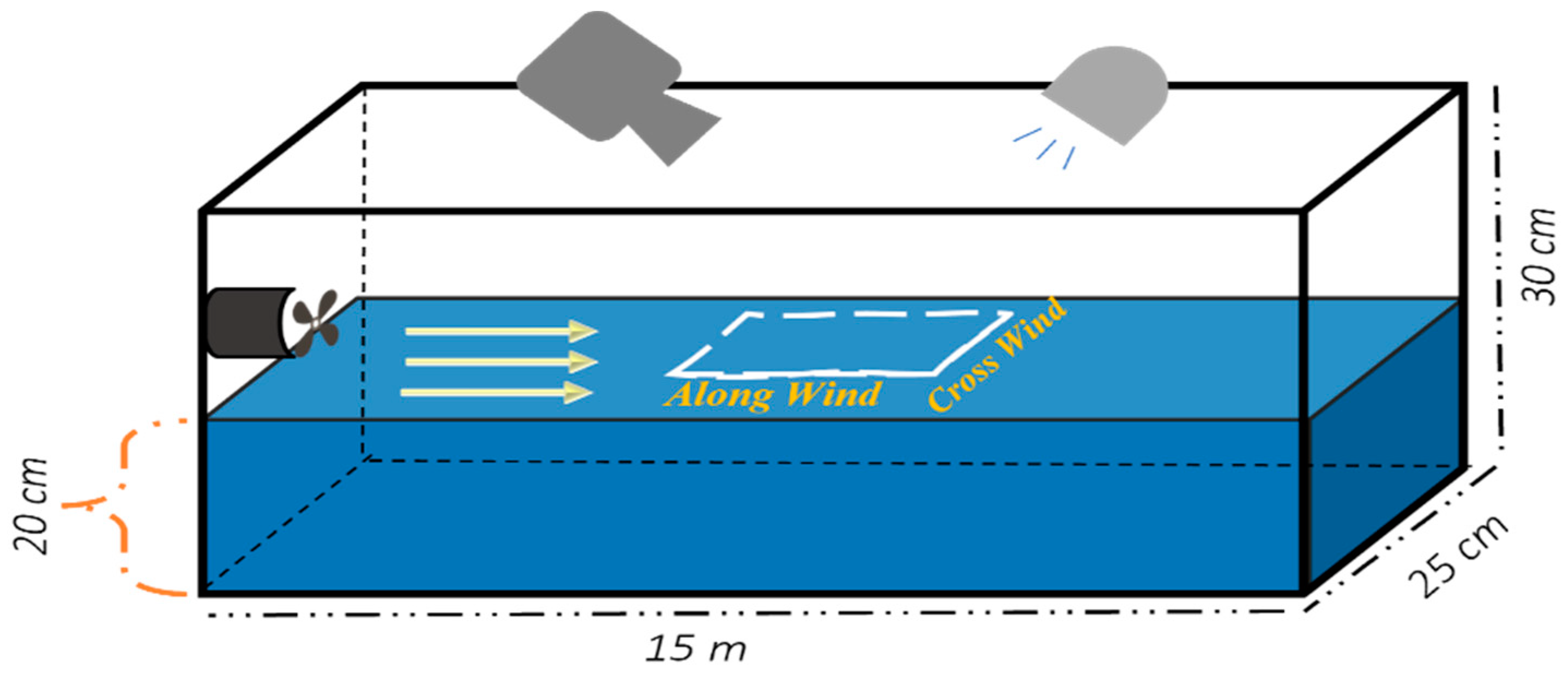
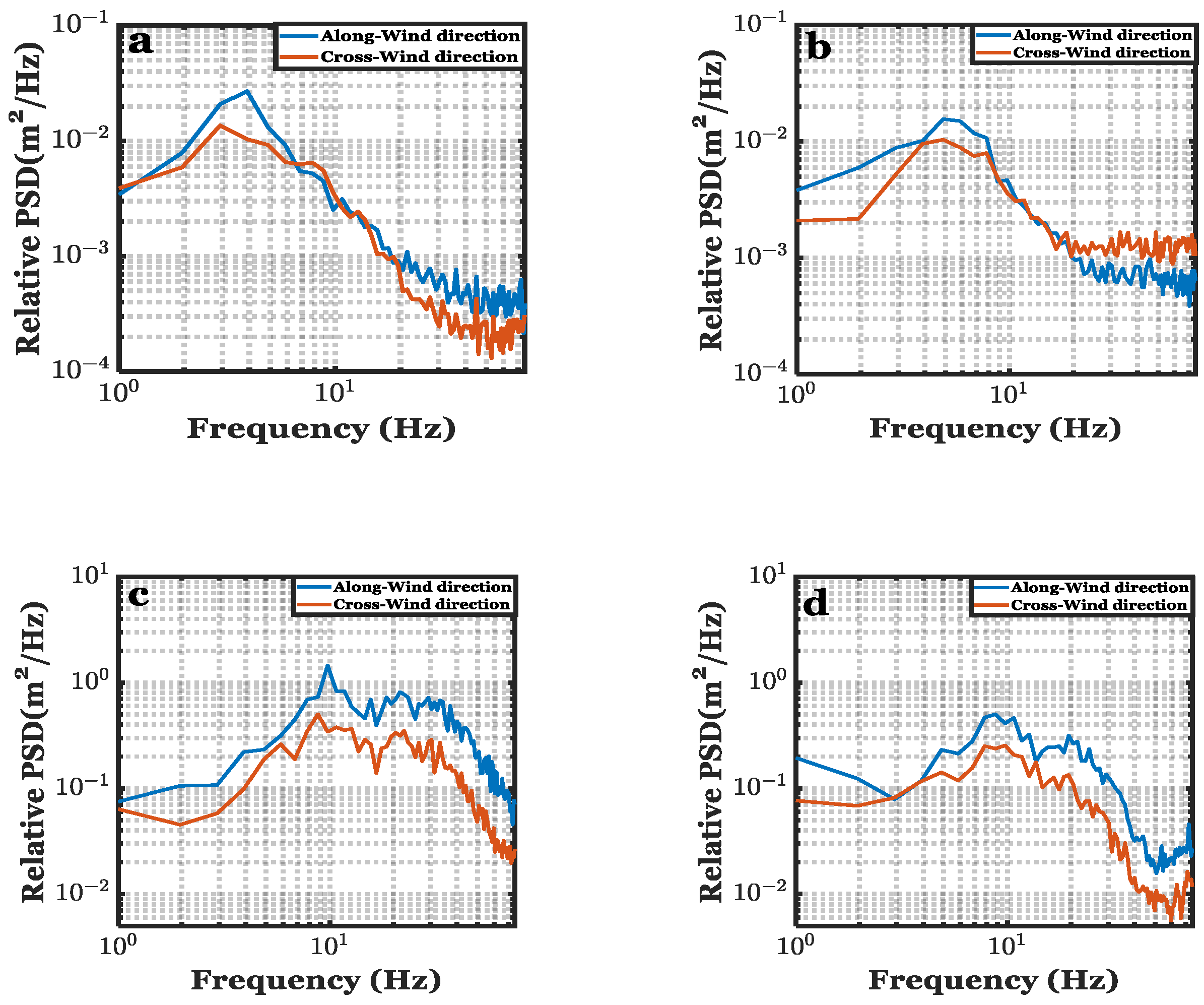
- A fourth classification is with respect to the presence or absence of wind-forcing. Waves are classified as being either “sea” or “swell”, where seas are the waves that feel the influence of wind-forcing, and swelling are the waves that have propagated away from the influence of the wind. Because of the wind-forcing, seas are steeper than swells; they have a larger value of than the swells. Because deep-water waves are dispersive, the swells sorted themselves into narrow-banded spectra, with the longer waves traveling faster than the shorter waves. Their frequencies are smaller, and their wavelengths are longer than those of the sea. A typical separation frequency is about 0.18 Hz [20]. The waves in the experiments discussed herein are seas. Their spectra are broad-banded and propagate in two horizontal directions at the air–sea interface. They have two independent slopes: the along-wind slope formed along the wind direction (x-axis herein) and the cross-wind slope formed perpendicular to the wind direction (y-axis).
2.2. Models of Ocean Wave Spectra
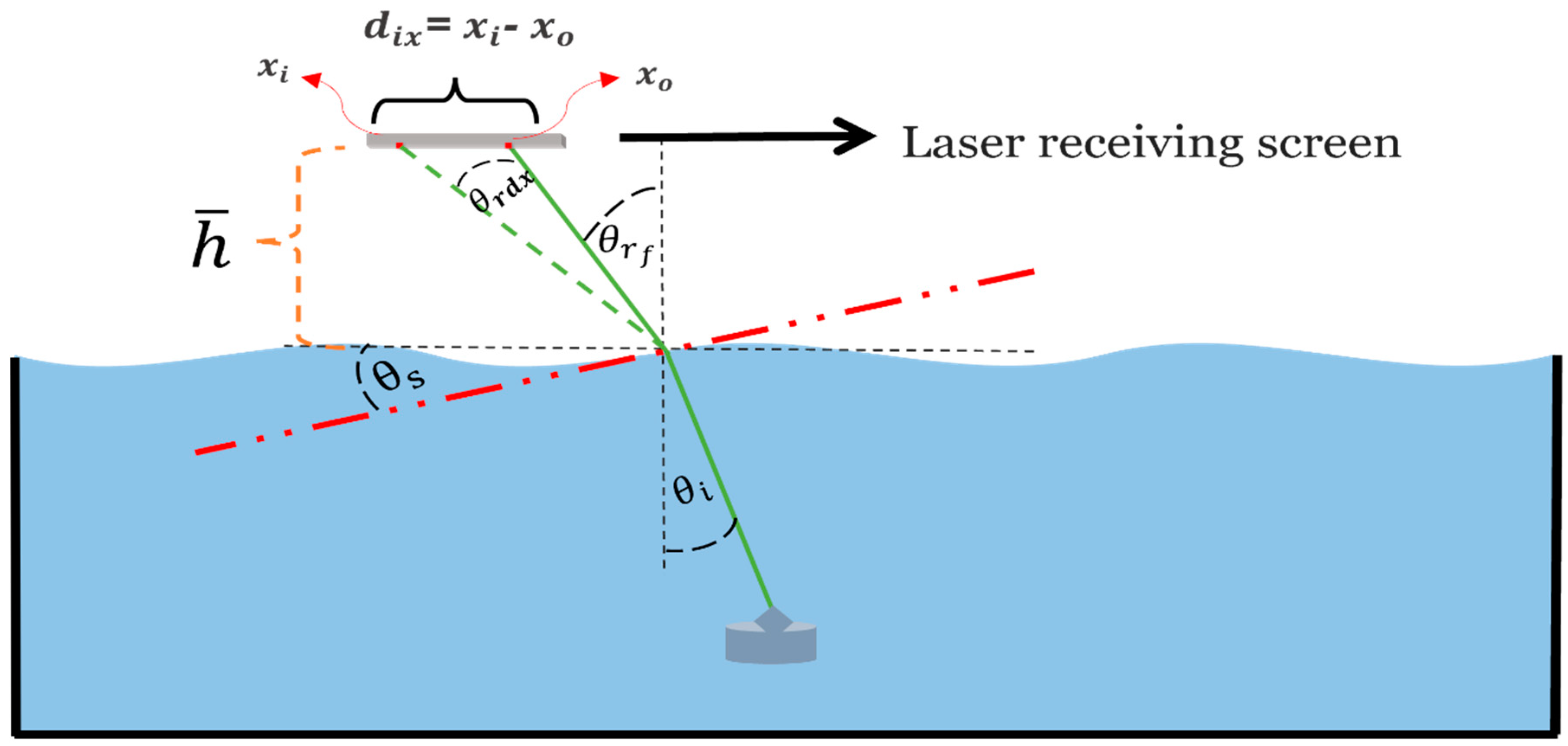
3. Laser Propagation at the Air–Sea Interface
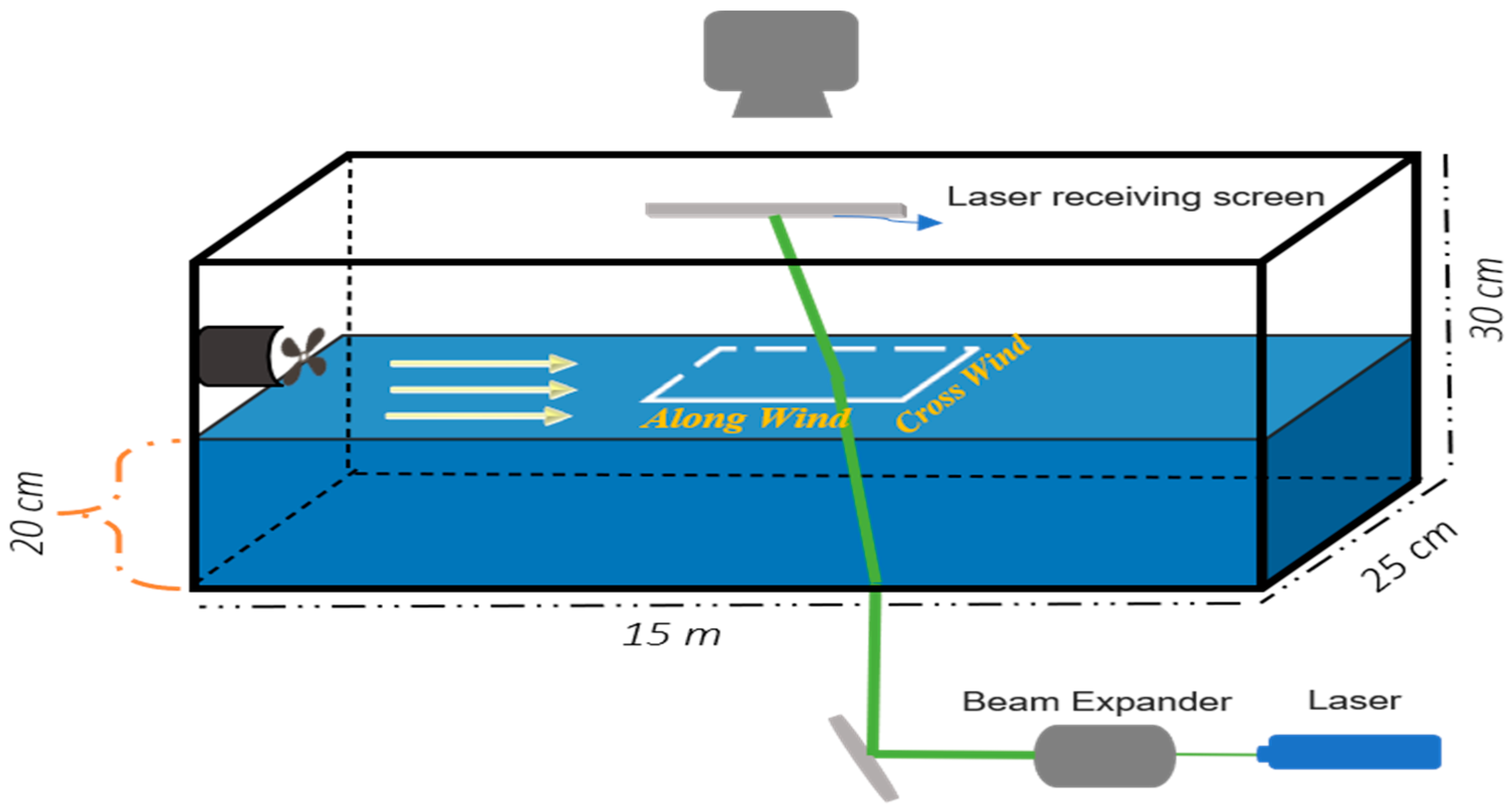
4. Experimental Apparatus and Procedures
5. Results and Discussion
5.1. Water Surface Spectrum
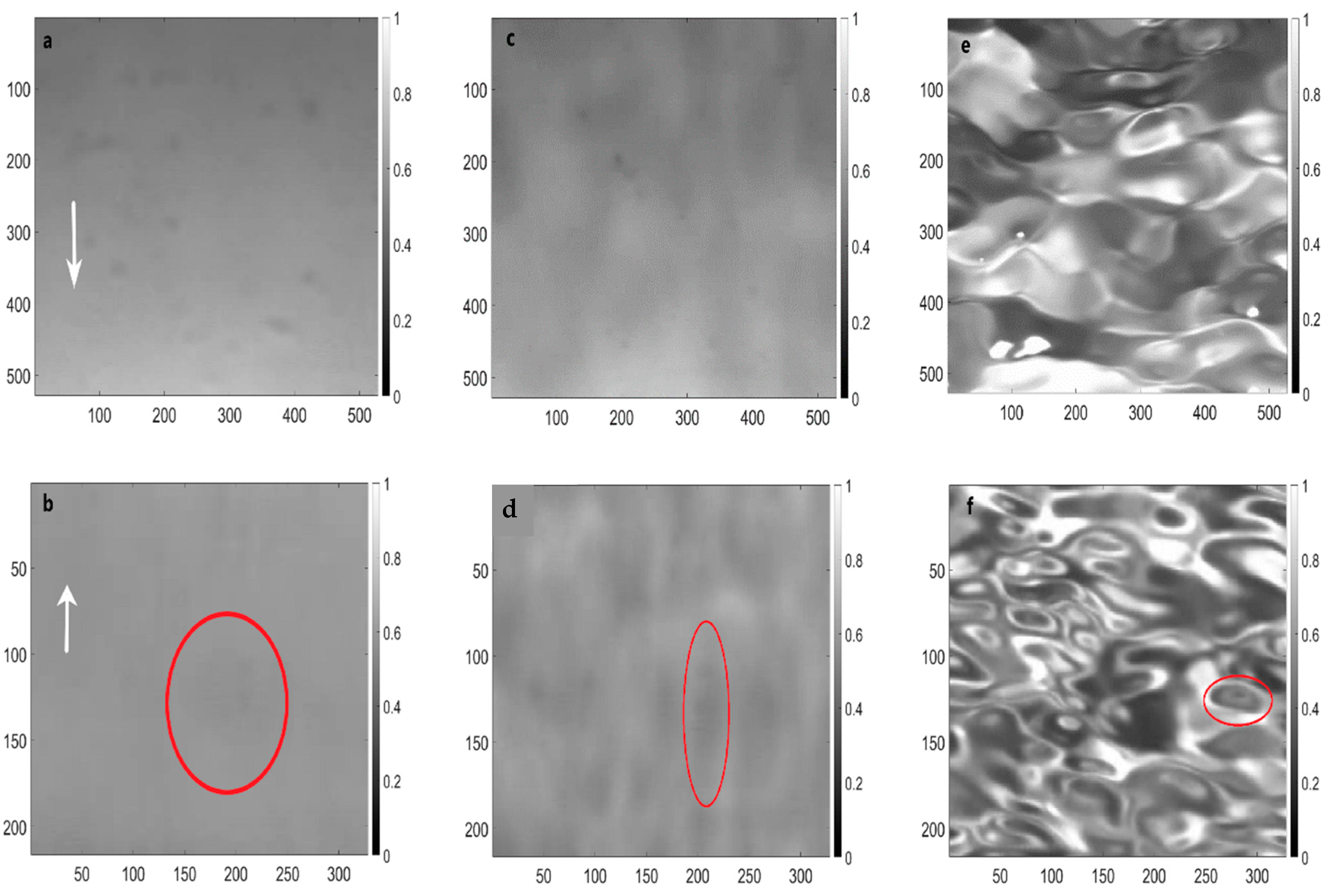
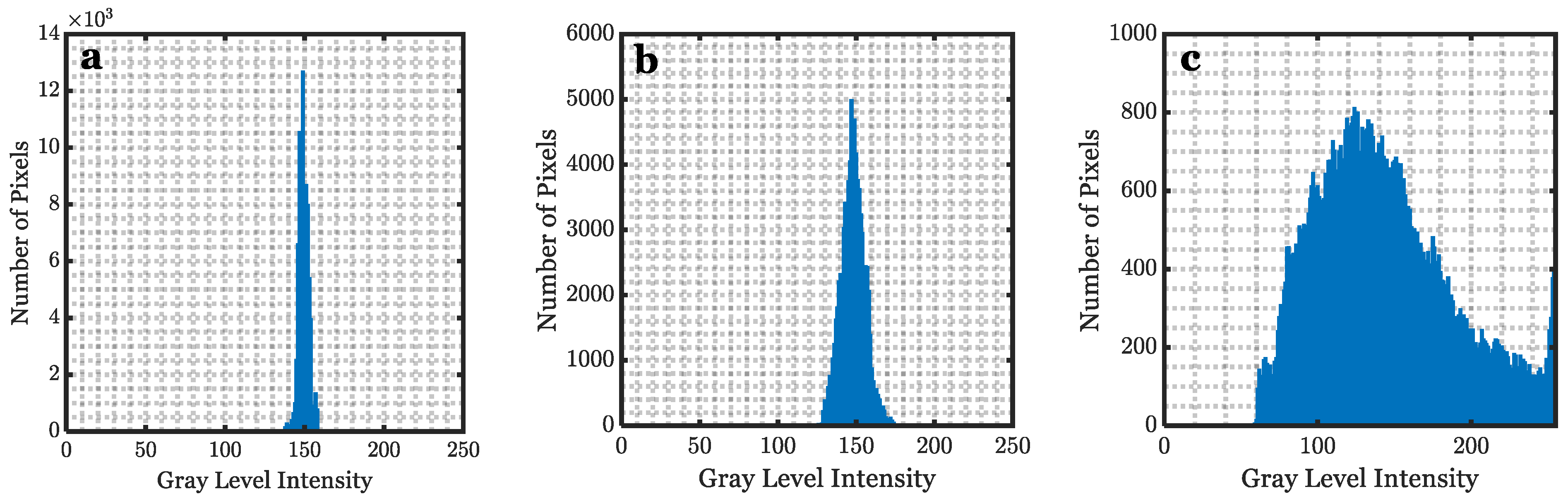
5.2. Laser Propagation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, Y.; Kong, M.; Ali, T.; Wang, J.; Sarwar, R.; Han, J.; Guo, C.; Sun, B.; Deng, N.; Xu, J. 26 m/55 Gbps air-water optical wireless communication based on an OFDM-modulated 520-nm laser diode. Opt. Express 2017, 25, 14760. [Google Scholar] [CrossRef] [PubMed]
- Alhalafi, A. Real-Time and Ultra-High Definition Video Transmission in Underwater Wireless Optical Networks. Ph.D. Thesis, KAUST, Thuwal, Saudi Arabia, 2018. [Google Scholar]
- Shihada, B.; Amin, O.; Bainbridge, C.; Jardak, S.; Alkhazragi, O.; Ng, T.K.; Ooi, B.; Berumen, M.; Alouini, M.S. Aqua-Fi: Delivering internet underwater using wireless optical networks. IEEE Commun. Mag. 2020, 58, 84–89. [Google Scholar] [CrossRef]
- Karp, S. Optical Communications between Underwater and above Surface (Satellite) Terminals. IEEE Trans. Commun. 1976, 24, 66–81. [Google Scholar] [CrossRef]
- Jerlov, N.G. Beam Attenuation. In Optical Oceanography; American Elsevier Publishing Company Incorporation: Amsterdam, The Netherlands, 1968; pp. 47–62. [Google Scholar]
- Kaushal, H.; Kaddoum, G. Underwater Optical Wireless Communication. IEEE Access 2016, 4, 1518–1547. [Google Scholar] [CrossRef]
- Arnon, S.; Barry, J.R.; Karagiannidis, G.K.; Schober, R.; Uysal, M. Advanced Optical Wireless Communication Systems; Cambridge University Press: Cambridge, UK, 2012; Volume 9780521197. [Google Scholar]
- Kizilkaya, S.; Walters, G.; Kane, T. The impact of oceanic gravity waves on laser propagation. In Dimensional Optical Metrology and Inspection for Practical Applications IV; SPIE: Cardiff, UK, 2015; Volume 9489, p. 94890E. [Google Scholar]
- Karlsson, T. Uncertainties Introduced by the Ocean Surface when Conducting Airborne Lidar Bathymetry Surveys. Master’s Thesis, Lund Institute of Technology, Lund, Sweden, 2011. [Google Scholar]
- Birkebak, M.; Eren, F.; Pe’eri, S.; Weston, N. The effect of surface waves on airborne lidar bathymetry (ALB) measurement uncertainties. Remote Sens. 2018, 10, 453. [Google Scholar] [CrossRef]
- Cavaleri, L.; Alves, J.H.G.M.; Ardhuin, F.; Babanin, A.; Banner, M.; Belibassakis, K.; Benoit, M.; Donelan, M.; Groeneweg, J.; Herbers, T.H.C.; et al. Wave modelling—The state of the art. Prog. Oceanogr. 2007, 75, 603–674. [Google Scholar] [CrossRef]
- Thon, S.; Ghazanfarpour, D. Ocean waves synthesis and animation using real world information. Comput. Graph. 2002, 26, 99–108. [Google Scholar] [CrossRef]
- Laing, A.K.; Gemmill, W.; Magnusson, A.K.; Burroughs, L.; Reistad, M.; Khandekar, M.; Holthuijsen, L.; Ewing, J.A.; Carter, D.J.T. Guide to Wave Analysis; World Meteorological Organization: Geneva, Switzerland, 1998; Volume 1998. [Google Scholar]
- Ryabkova, M.; Karaev, V.; Guo, J.; Titchenko, Y. A Review of Wave Spectrum Models as Applied to the Problem of Radar Probing of the Sea Surface. J. Geophys. Res. Ocean. 2019, 124, 7104–7134. [Google Scholar] [CrossRef]
- Dean, R.G.; Dalrymple, R.A. Water Wave Mechanics for Engineers and Scientists; World Scientific Publishing Company: Singapore, 1991; Volume 2. [Google Scholar]
- Stokes, G.G. On the theory of oscillatory waves. Trans. Camb. Philos. Soc. 1847, 8, 441–455. [Google Scholar]
- LeBlond, P.H.M. Waves in the Ocean, 1st ed.; Elsevier Oceanography Series; Elsevier: New York, NY, USA, 1981; Volume 20. [Google Scholar]
- Ablowitz, M.J.; Segur, H. Solitons and the Inverse Scattering Transform; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1981; p. 425. [Google Scholar]
- Hammack, J.L.; Henderson, D.M. Resonant Interactions Among Surface Water Waves. Annu. Rev. Fluid Mech. 1993, 25, 55–97. [Google Scholar] [CrossRef]
- US Department of Commerce, N.O. and A.A.N.W.S.N.D.B.C. NDBC Moored Buoy Program. 8 February 2010. Available online: http://www.ndbc.noaa.gov/dwa.shtml (accessed on 21 August 2022).
- Kinsman, B. Wind Waves, Their Generation and Propagation on the Ocean Surface; Prentice-Hall: Englewood Cliffs, NJ, USA, 1965. [Google Scholar]
- Pierson, W.J.J.; Moskowitz, L. A Proposed Spectral Form for Fully Developed Wind Seas Based on the Similarity Theory of S. A. Kitaigorodskii. J. Geophys. Res. Space Phys. 1964, 69, 5181–5190. [Google Scholar] [CrossRef]
- Hasselmann, K.; Barnett, T.P.; Bouws, E.; Carlson, H.; Cartwright, D.E.; Enke, K.; Ewing, J.A.; Gienapp, H.; Hasselmann, D.E.; Kruseman, P.; et al. Measurements of wind-wave growth and swell decay during the Joint North Sea Wave Project (JONSWAP). Ergänzungsheft 1973, 8–12. [Google Scholar] [CrossRef]
- Xiradakis, P. The Refractive Effects of Laser Propagation through the Ocean and within the Ocean. Master’s Thesis, Naval Postgraduate School, Monterey, CA, USA, 2009. [Google Scholar]
- Tessendorf, J. Simulating Ocean Water. In Proceedings of the SIGGRAPH, Los Angeles, CA, USA, 12–17 August 2001. [Google Scholar]
- Horvath, C.J. Empirical directional wave spectra for computer graphics. In Proceedings of the 2015 Symposium on Digital Production, Los Angeles, CA, USA, 8 August 2015; pp. 29–39. [Google Scholar]
- Gholami, A.; Saghafifar, H. Simulation of an active underwater imaging through a wavy sea surface. J. Mod. Opt. 2018, 65, 1210–1218. [Google Scholar] [CrossRef]
- Nair, M.A.; Kumar, V.S. Wave spectral shapes in the coastal waters based on measured data off Karwar on the western coast of India. Ocean Sci. 2017, 13, 365–378. [Google Scholar] [CrossRef]
- Kitaigordskii, S.A.; Krasitskii, V.P.; Zaslavskii, M.M. On Phillips’ theory of equilibrium range in the spectra of wind-generated gravity waves. J. Phys. Oceanogr. 1975, 5, 1689–1699. [Google Scholar] [CrossRef]
- Majumdar, A.K.; Siegenthaler, J.; Land, P. Analysis of optical communications through the random air-water interface: Feasibility for under-water communications. In Laser Communication and Propagation through the Atmosphere and Oceans; SPIE: Cardiff, UK, 2012; Volume 8517, p. 85170T. [Google Scholar]
- Alharbi, O.; Xia, W.; Wang, M.; Deng, P.; Kane, T. Measuring and modeling the air-sea interface and its impact on FSO systems. In Laser Communication and Propagation through the Atmosphere and Oceans VII; SPIE: Cardiff, UK, 2018; Volume 1077002, p. 1. [Google Scholar]
- Apel, J.R. An improved model of the ocean surface wave vector spectrum and its effects on radar backscatter. J. Geophys. Res. Earth Surf. 1994, 99, 16269–16291. [Google Scholar] [CrossRef]
- Elfouhaily, T.; Chapron, B.; Katsaros, K.; Vandemark, D. A unified directional spectrum for long and short wind-driven waves. J. Geophys. Res. C Ocean. 1997, 102, 15781–15796. [Google Scholar] [CrossRef]
- Karlsson, T.; Pe’eri, S.; Axelsson, A. The impact of sea state condition on airborne lidar bathymetry measurements. In Laser Radar Technology and Applications XVII; SPIE: Cardiff, UK, 2012; Volume 8379, p. 837913. [Google Scholar]
- Westfeld, P.; Maas, H.G.; Richter, K.; Weiß, R. Analysis and correction of ocean wave pattern induced systematic coordinate errors in airborne LiDAR bathymetry. ISPRS J. Photogramm. Remote Sens. 2017, 128, 314–325. [Google Scholar] [CrossRef]
- Wang, M.; Yuan, X.; Alharbi, O.; Deng, P.; Kane, T. Propagation of laser beams through air-sea turbulence channels. In Laser Communication and Propagation through the Atmosphere and Oceans VII; SPIE: Cardiff, UK, 2018; Volume 1077003, p. 8. [Google Scholar]
- Dong, L.; Li, N.; Xie, X.; Bao, C.; Li, X.; Li, D. A fast analysis method for blue-green laser transmission through the sea surface. Sensors 2020, 20, 1758. [Google Scholar] [CrossRef]
- Wang, A.; Zhu, L.; Zhao, Y.; Li, S.; Lv, W.; Xu, J.; Wang, J. Adaptive water-air-water data information transfer using orbital angular momentum. Opt. Express 2018, 26, 8669. [Google Scholar] [CrossRef] [PubMed]
- Sun, X.; Kong, M.; Shen, C.; Kang, C.H.; Ng, T.K.; Ooi, B.S. On the realization of across wavy water-air-interface diffuse-line-of-sight communication based on an ultraviolet emitter. Opt. Express 2019, 27, 19635. [Google Scholar] [CrossRef] [PubMed]
- Sun, X.; Kong, M.; Alkhazragi, O.A.; Telegenov, K.; Ouhssain, M.; Sait, M.; Guo, Y.; Jones, B.H.; Shamma, J.S.; Ng, T.K.; et al. Field Demonstrations of Wide-Beam Optical Communications through Water-Air Interface. IEEE Access 2020, 8, 160480–160489. [Google Scholar] [CrossRef]
- Carver, C.J.; Tian, Z.; Science, C.; College, D.; Zhang, H.; Odame, K.M.; Nsdi, I.; Carver, C.J.; Tian, Z.; Zhang, H.; et al. AmphiLight: Direct Air-Water Communication with Laser Light This paper is included in the Proceedings of the AmphiLight: Direct Air-Water Communication with Laser Light. Nsdi 2020. [Google Scholar] [CrossRef]
- Tonolini, F.; Adib, F. Networking across Boundaries: Enabling Wireless Communication through the Water-Air Interface. In Proceedings of the Conference of the ACM Special Interest Group on Data Communication, Budapest, Hungary, 20–25 August 2018; Volume 1, pp. 117–131. [Google Scholar]
- Kizilkaya, S. Optical Propagation through the Ocean Surface. Master Thesis, The Pennsylvania State University, State College, PA, USA, 2012. [Google Scholar]
- Mobley, C.D. Modeling Sea Surfaces a Tutorial on Fourier Transform Techniques; no. October; Sequoia Scientific, Inc.: Bellevue, WA, USA, 2014. [Google Scholar]
- Foster, R.; Gilerson, A. Polarized transfer functions of the ocean surface for above-surface determination of the vector submarine light field. Appl. Opt. 2016, 55, 9476–9494. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Chen, H.; Yin, H. Facet-Based Investigation on EM Scattering from Electrically Large Sea Surface with Two-Scale Profiles: Theoretical Model. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1967–1975. [Google Scholar] [CrossRef]
- Gholami, A.; Saghafifar, H. Computational modeling of the effect of wind-driven ocean waves on the underwater light field distributions. Optik 2017, 142, 598–607. [Google Scholar] [CrossRef]
- Garby, B. The Effect of Ocean Waves on Airborne Lidar Bathymetry by. Master’s Thesis, University of Colorado, Boulder, CO, USA, 2019. [Google Scholar]
- Li, J.; Yuan, X.; Luo, J.; Li, S.-B. The centroid drift of laser spots with watersurface wave turbulence in underwater opticalwireless communication. Appl. Opt. 2020, 59, 6210–6217. [Google Scholar] [CrossRef]
- Singh, R.; Hattuniemi, J.M.; Mäkynen, A.J. Analysis of accuracy of laser spot centroid estimation. Adv. Laser Technol. 2007, 7022, 702216. [Google Scholar]
- Du-Ming, T. A fast thresholding selection procedure for multimodal and unimodal histograms. Pattern Recognit. Lett. 1995, 16, 653–666. [Google Scholar] [CrossRef]
- Hwang, P.A. Variable Spectral Slope and Nonequilibrium Surface Wave Spectrum. January 2019. Available online: https://arxiv.org/abs/1906.07998v1 (accessed on 29 January 2022).
- Pierson, W.J.J.; Stacy, R.A.; Stacy, R.A. The Elevation, Slope, and Curvature Spectra of a Wind Roughened Sea Surface; NASA: Washington, DC, USA, 1973. [Google Scholar]
- Munk, W.H. High frequency spectrum of ocean waves. J. Mar. Res. 1955, 14, 302–314. [Google Scholar]
- Melville, W.K.; Felizardo, F.C.; Matusov, P. Wave slope and wave age effects in measurements of electromagnetic bias. J. Geophys. Res. 2004, 109, 7018. [Google Scholar] [CrossRef]
- Land, P.; Majumdar, A.K. Demonstration of adaptive optics for mitigating laser propagation through a random air-water interface. In Ocean Sensing and Monitoring VIII; SPIE: Cardiff, UK, 2016; Volume 9827, p. 982703. [Google Scholar]
- Deng, P.; Kane, T.; Alharbi, O.; Deng, P.; Kane, T.; Alharbi, O. Reconfigurable free space optical data center network using gimbal-less MEMS retroreflective acquisition and tracking. In Free-Space Laser Communication and Atmospheric Propagation XXX; SPIE: Cardiff, UK, 2021; Volume 1052403. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spectrum/Model | Description | References |
|---|---|---|
| Gerstner Waves (1802) | It is based on Navier–Stokes equation by describing a particle’s motion on the surface as a circular motion to provide an approximate to simulate the air–water interface. | [12,25] |
| Phillips (1954) | A fully developed sea is considered deep water. It is widely used in real-time simulation of oceanic waves. | [9,25,26] |
| Neumann (1955) | It is valid for only fully developed sea, and it is valid for only gravity waves regime. | [8] |
| Pierson–Moskowitz (1964) | It is based on the Phillips equilibrium range representing a fully developed sea. It is designed to describe gravity waves over infinite fetch. | [13,24] |
| JONSWAP (1964) | A modified Pierson–Moskowitz spectrum with enhanced peak and fetch dependent factors. It is valid only for limited fetch and infinite water depth. | [13,27,28] |
| TMA (1985) | Developed as an extension of the JONSWAP spectrum for finite water depth. | [26,29] |
| Majumdar & Brown (1992) | Probabilistic method applied to investigate the influence of the wavy air–sea interface on the laser beam transmission based on the Gram–Charlier model. | [30] |
| Apel (1994) | Modified version of the JONSWAP spectrum includes improved capillary and gravity–capillary wave predictions. It is developed for shallow water with short fetch winds (100–1000) m. | [10,31,32] |
| Elfouhaily (1997) | Using data observations from previous models, a unified directional spectrum for long and short wind-driven waves based on the Apel wave spectrum. | [33] |
| Laser Beam Incident Angle (o) with d = 0.3 cm | ||||||||
|---|---|---|---|---|---|---|---|---|
| Standard Deviation of Slope Angle (o) | Standard Deviation of Refraction Angle (o) | |||||||
| Wind Speed (m/s) | Along-Wind Direction | Cross-Wind Direction | Along-Wind Direction | Cross-Wind Direction | ||||
| (0°) | (32°) | (0°) | (32°) | (0°) | (0°) | (32°) | (0°) | |
| 0.9 | 0.04 | 0.07 | 0.03 | 0.03 | 0.01 | 0.04 | 0.01 | 0.02 |
| 1.9 | 0.21 | 0.17 | 0.2 | 0.09 | 0.07 | 0.10 | 0.06 | 0.05 |
| 3.3 | 4.18 | 2.13 | 1.66 | 0.78 | 1.39 | 1.27 | 0.55 | 0.47 |
| Laser Beam Incident Angle (o) with d = 0.8 cm | ||||||||
|---|---|---|---|---|---|---|---|---|
| Standard Deviation of Slope Angle (o) | Standard Deviation of Refraction Angle (o) | |||||||
| Wind Speed (m/s) | Along-Wind Direction | Cross-Wind Direction | Along-Wind Direction | Cross-Wind Direction | ||||
| (0°) | (32°) | (0°) | (32°) | (0°) | (32°) | (0°) | (32°) | |
| 0.9 | 0.04 | 0.05 | 0.04 | 0.03 | 0.01 | 0.03 | 0.01 | 0.02 |
| 1.9 | 0.2 | 0.10 | 0.17 | 0.07 | 0.07 | 0.06 | 0.06 | 0.04 |
| 3.3 | 1.73 | 1.05 | 0.83 | 0.38 | 0.57 | 0.63 | 0.27 | 0.23 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alharbi, O.; Kane, T.; Henderson, D. Impact of a Turbulent Ocean Surface on Laser Beam Propagation. Sensors 2022, 22, 7676. https://doi.org/10.3390/s22197676
Alharbi O, Kane T, Henderson D. Impact of a Turbulent Ocean Surface on Laser Beam Propagation. Sensors. 2022; 22(19):7676. https://doi.org/10.3390/s22197676
Chicago/Turabian StyleAlharbi, Omar, Tim Kane, and Diane Henderson. 2022. "Impact of a Turbulent Ocean Surface on Laser Beam Propagation" Sensors 22, no. 19: 7676. https://doi.org/10.3390/s22197676
APA StyleAlharbi, O., Kane, T., & Henderson, D. (2022). Impact of a Turbulent Ocean Surface on Laser Beam Propagation. Sensors, 22(19), 7676. https://doi.org/10.3390/s22197676