


Data-Driven Predictive Control of Exoskeleton for Hand Rehabilitation with Subspace Identification



Abstract
1. Introduction
2. Materials and Methods
2.1. Exoskeleton for Hand Rehabilitation
2.2. Proposed Control Method
2.3. System Identification Methods
2.3.1. Output Error Method for Identification
2.3.2. Subspace Identification Method
2.4. Data-Driven Predictive Controller
2.5. DDPC with Considering Constraints via Quadratic Programming
2.6. Experimental Setup
2.7. Passive and Active Rehabilitation
3. Results and Discussion
3.1. Experimental Results of Subspace Prediction Algorithm
3.2. Experimental Results of Data-Driven Predictive Controller
3.2.1. Effect of Data Length on Control Success
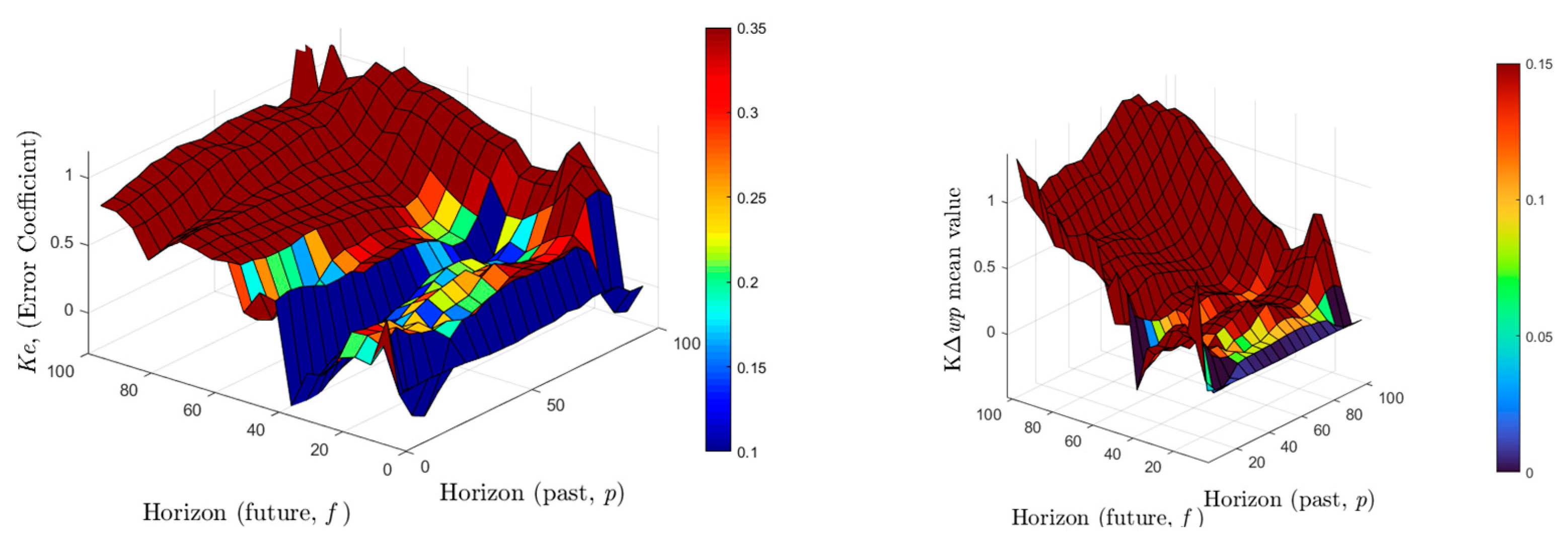
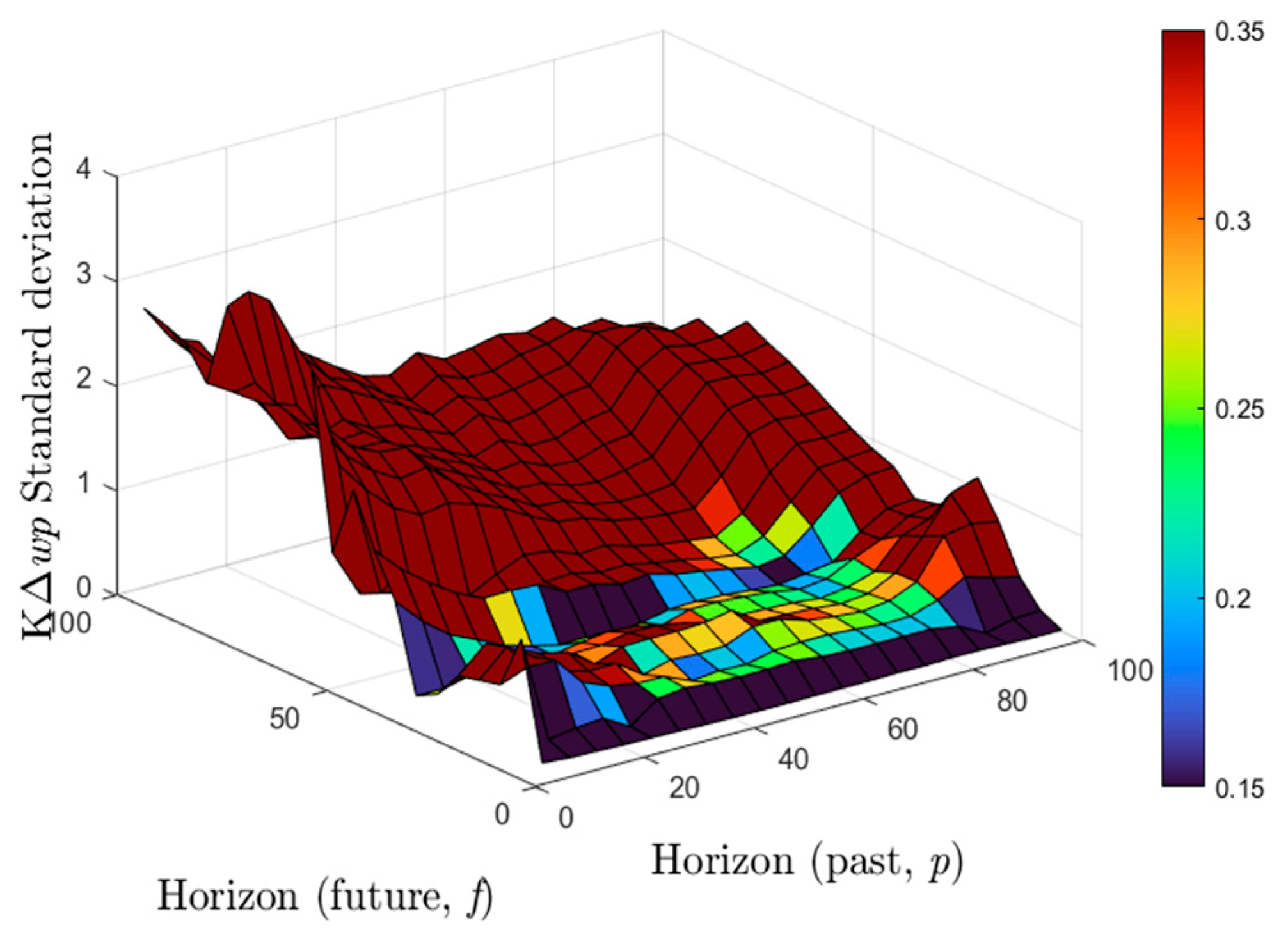
3.2.2. Analysis of Model Horizon Parameters (p, f)
3.3. The Effect of Q and R Parameters on the Control System Succession
3.4. Passive and Active Rehabilitation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Yue, Z.; Zhang, X.; Wang, J. Hand rehabilitation robotics on poststroke motor recovery. Behav. Neurol. 2017, 2017, 3908135. [Google Scholar] [CrossRef] [PubMed]
- Akgun, G.; Cetin, A.E.; Kaplanoglu, E. Exoskeleton design and adaptive compliance control for hand rehabilitation. Trans. Inst. Meas. Control 2020, 42, 493–502. [Google Scholar] [CrossRef]
- Du Plessis, T.; Djouani, K.; Oosthuizen, C. A review of active hand exoskeletons for rehabilitation and assistance. Robotics 2021, 10, 40. [Google Scholar] [CrossRef]
- Reitan, I.; Dahlin, L.B.; Rosberg, H.E. Patient-reported quality of life and hand disability in elderly patients after a traumatic hand injury—A retrospective study. Health Qual. Life Outcomes 2019, 17, 148. [Google Scholar] [CrossRef]
- Dovat, L.; Lambercy, O.; Gassert, R.; Maeder, T.; Milner, T.; Leong, T.C.; Burdet, E. HandCARE: A cable-actuated rehabilitation system to train hand function after stroke. IEEE Trans. Neural Syst. Rehabil. Eng. 2008, 16, 582–591. [Google Scholar] [CrossRef]
- Kabir, R.; Sunny, M.S.H.; Ahmed, H.U.; Rahman, M.H. Hand Rehabilitation Devices: A Comprehensive Systematic Review. Micromachines 2022, 13, 1033. [Google Scholar] [CrossRef]
- Perry, J.C.; Trimble, S.; Machado, L.G.C.; Schroeder, J.S.; Belloso, A.; Rodriguez-de-Pablo, C.; Keller, T. Design of a spring-assisted exoskeleton module for wrist and hand rehabilitation. In Proceedings of the 2016 38th Annual International Conference, Orlando, FL, USA, 16–20 August 2016. [Google Scholar]
- Tsoi, Y.H.; Xie, S.Q. Impedance control of ankle rehabilitation robot. In Proceedings of the 2008 IEEE International Conference on Robotics and Biomimetics, Bangkok, Thailand, 22–25 February 2009; pp. 840–845. [Google Scholar]
- Li, X.; Liu, Y.H.; Yu, H. Iterative learning impedance control for rehabilitation robots driven by series elastic actuators. Automatica 2018, 90, 1–7. [Google Scholar] [CrossRef]
- Culmer, P.R.; Jackson, A.E.; Makower, S.; Richardson, R.; Cozens, J.A.; Levesley, M.C.; Bhakta, B.B. A control strategy for upper limb robotic rehabilitation with a dual robot system. IEEE/ASME Trans. Mechatron. 2009, 15, 575–585. [Google Scholar] [CrossRef]
- Jafarov, E.M.; Parlakçi, M.N.A.; Istefanopulos, Y. A new variable structure PID-controller design for robot manipulators. IEEE Trans. Control Syst. Technol. 2004, 13, 122–130. [Google Scholar] [CrossRef]
- Mo, L.; Feng, P.; Shao, Y.; Shi, D.; Ju, L.; Zhang, W.; Ding, X. Anti-Disturbance Sliding Mode Control of a Novel Variable Stiffness Actuator for the Rehabilitation of Neurologically Disabled Patients. Front. Robot. AI 2022, 9, 9. [Google Scholar] [CrossRef]
- Riani, A.; Madani, T.; Benallegue, A.; Djouani, K. Adaptive integral terminal sliding mode control for upper-limb rehabilitation exoskeleton. Control Eng. Pract. 2018, 75, 108–117. [Google Scholar] [CrossRef]
- Chen, Z.; Li, Z.; Chen, C.P. Disturbance observer-based fuzzy control of uncertain MIMO mechanical systems with input nonlinearities and its application to robotic exoskeleton. IEEE Trans. Cybern. 2016, 47, 984–994. [Google Scholar] [CrossRef]
- Rahmani, M.; Rahman, M.H. An upper-limb exoskeleton robot control using a novel fast fuzzy sliding mode control. J. Intell. Fuzzy Syst. 2019, 36, 2581–2592. [Google Scholar] [CrossRef]
- Yu, H.; Huang, S.; Chen, G.; Thakor, N. Control design of a novel compliant actuator for rehabilitation robots. Mechatronics 2013, 23, 1072–1083. [Google Scholar] [CrossRef]
- Chen, J.; Huang, Y.; Guo, X.; Zhou, S.; Jia, L. Parameter identification and adaptive compliant control of rehabilitation exoskeleton based on multiple sensors. Measurement 2020, 159, 107765. [Google Scholar] [CrossRef]
- Ulkir, O.; Akgun, G.; Nasab, A.; Kaplanoglu, E. Data-Driven Predictive Control of a Pneumatic Ankle Foot Orthosis. Adv. Electr. Comput. Eng. 2021, 21, 65–74. [Google Scholar] [CrossRef]
- Maciejowski, J.M. Predictive Control: With Constraints; Pearson Education: London, UK, 2002. [Google Scholar]
- Mardi, N.A. Data-Driven Subspace-Based Model Predictive Control. Doctoral Dissertation, RMIT University, Melbourne, Australia, 2010. [Google Scholar]
- Ulkir, O.; Akgun, G.A.Z.İ.; Kaplanoglu, E. Real-time implementation of data-driven predictive controller for an artificial muscle. Stud. Inform. Control 2019, 28, 189–200. [Google Scholar] [CrossRef]
- Rossiter, J.A. Model-Based Predictive Control: A Practical Approach; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Akgün, G. Data Driven Predictive Control of Exoskeleton for Rehabilitation. Doctoral Dissertation, Marmara Universitesi, Istanbul, Turkey, 2019. (In Turkish). [Google Scholar]
- Akgun, G.; Kaplanoglu, E.; Cetin, A.E.; Ulkir, O. Mechanical design of exoskeleton for hand therapeutic rehabilitation. Quest J. J. Res. Mech. Eng. 2018, 4, 9–17. [Google Scholar]
- Van Overschee, P.; De Moor, B. Subspace Identification for Linear Systems: Theory—Implementation—Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Kadali, R.; Huang, B.; Rossiter, A. A data driven subspace approach to predictive controller design. Control Eng. Pract. 2003, 11, 261–278. [Google Scholar] [CrossRef]
- González, A.H.; Ferramosca, A.; Bustos, G.A.; Marchetti, J.L.; Fiacchini, M.; Odloak, D. Model predictive control suitable for closed-loop re-identification. Syst. Control Lett. 2014, 69, 23–33. [Google Scholar] [CrossRef]
- Meidanshahi, V.; Corbett, B.; Adams, T.A., II; Mhaskar, P. Subspace model identification and model predictive control based cost analysis of a semicontinuous distillation process. Comput. Chem. Eng. 2017, 103, 39–57. [Google Scholar] [CrossRef]
- Venkat, A.N.; Hiskens, I.A.; Rawlings, J.B.; Wright, S.J. Distributed MPC strategies with application to power system automatic generation control. IEEE Trans. Control Syst. Technol. 2008, 16, 1192–1206. [Google Scholar] [CrossRef]
- Kaplanoğlu, E.; Arsan, T.; Varol, H.S. Predictive control of a constrained pressure and level system. Turk. J. Electr. Eng. Comput. Sci. 2015, 23, 641–653. [Google Scholar] [CrossRef]
- Mayne, D.Q.; Rawlings, J.B.; Rao, C.V.; Scokaert, P.O. Constrained model predictive control: Stability and optimality. Automatica 2000, 36, 789–814. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiments | Error (e) | ||
|---|---|---|---|
| 1 | 0.3 | 5 | 0.0187 |
| 2 | 0.4 | 5 | 0.0266 |
| 3 | 0.5 | 5 | 0.0337 |
| 4 | 0.6 | 5 | 0.0395 |
| 5 | 0.7 | 5 | 0.0727 |
| 6 | 0.8 | 5 | 0.0825 |
| 7 | 1 | 5 | 0.1431 |
| 8 | 2 | 5 | 0.9273 |
| Experiment | Error (e) | ||||
|---|---|---|---|---|---|
| 9 | 0.3 | 0.4 | 2 | 3 | 0.0127 |
| 10 | 0.2 | 0.8 | 2 | 3 | 0.0267 |
| 11 | 0.2 | 0.8 | 1 | 4 | 0.0360 |
| 12 | 0.5 | 0.1 | 2 | 2 | 0.0235 |
| Experiment | Error | ||||||
|---|---|---|---|---|---|---|---|
| 13 | 0.3 | 0.4 | 0.7 | 2 | 2 | 2 | 0.0088 |
| 14 | 0.3 | 0.4 | 0.1 | 2 | 2 | 2 | 0.0239 |
| 15 | 0.3 | 0.4 | 0.1 | 2 | 2 | 5 | 0.0251 |
| 16 | 0.5 | 0.4 | 0.1 | 2 | 2 | 5 | 0.0211 |
| Experiment | e (Error) | ||
|---|---|---|---|
| 17 | 0.003 | 4 | 0.0149 |
| 18 | 0.005 | 5 | 0.0200 |
| 19 | 0.01 | 5 | 0.0083 |
| 20 | 0.01 | 3 | 0.0048 |
| Model Horizon (p) | Ke | Response of Step Function | Tracking Performance | |||
|---|---|---|---|---|---|---|
| Rising Time (s) | Overshoot % | mse | ||||
| 30 | 0.1908 | 0.0730 | 0.2499 | 3.88 | 0.17 | 4.3138 |
| 40 | 0.2853 | 0.0852 | 0.2493 | 5.77 | 0.20 | 18.4100 |
| 50 | 0.3746 | 0.0904 | 0.2399 | 3.84 | 0.18 | 1.4763 |
| 60 | 0.3780 | 0.1045 | 0.2202 | * None | * None | 16.9600 |
| Future Horizon (f) | Ke | Response of Step Function | Tracking Performance | |||
|---|---|---|---|---|---|---|
| Rising Time (s) | Overshoot % | mse | ||||
| 5 | 0.0476 | 0,0066 | 0.0222 | 3.38 | 0.0962 | 9.0828 |
| 10 | 0.1908 | 0.0733 | 0.2400 | 3.85 | 0.0322 | 4.3138 |
| 15 | 0.2191 | 0.0996 | 0.2946 | 3.94 | 0.0220 | 1.2027 |
| 20 | 0.2385 | 0.1580 | 0.3942 | 4.36 | 0.0018 | 3.9737 |
| 25 | 0.1688 | 0.1188 | 0.2980 | 4.48 | 0.0254 | 10.5345 |
| 50 | 0.1951 | 0.1897 | 0.4622 | 6.91 | 0.0524 | 60.1988 |
| Q | R | Ke | Response of Step Function | Tracking Performance | |||
|---|---|---|---|---|---|---|---|
| Rising Time (s) | Overshoot % | mse | |||||
| 5 | 2 | 0.7694 | 0.1969 | 0.8251 | * None | * None | 288.1818 |
| 4 | 2 | 0.5693 | 0.1513 | 0.6184 | 5.654 | 0.0385 | 43.5554 |
| 3 | 2 | 0.4975 | 0.1354 | 0.5512 | 6.631 | 0.0084 | 65.2003 |
| 2 | 2 | 0.4329 | 0.1202 | 0.4776 | 3.093 | 0.0688 | 33.0765 |
| 1 | 2 | 0.2589 | 0.0806 | 0.2981 | 3.031 | 0.0050 | 11.8783 |
| 1 | 3 | 0.1897 | 0.0648 | 0.2269 | 3.528 | 0.0118 | 6.9044 |
| 1 | 5 | 0.1293 | 0.0510 | 0.1649 | 3.189 | 0.0286 | 3.7065 |
| 1 | 10 | 0.0807 | 0.0398 | 0.1152 | 3.493 | 0.0490 | 2.7420 |
| 1 | 20 | 0.0549 | 0.0337 | 0.0889 | 3.902 | 0.0626 | 2.4434 |
| Ke | Response of Step Function | Tracking Performance | ||||
|---|---|---|---|---|---|---|
| Rising Time (s) | Overshoot % | mse | ||||
| 5 | 0.1688 | 0.1188 | 0.2980 | 3.232 | 0.0254 | 10.5345 |
| 10 | 0.1799 | 0.0798 | 0.2429 | 3.224 | 0.0152 | 8.5312 |
| 15 | 0.2220 | 0.0768 | 0.2669 | 3.210 | 0.0084 | 3.9609 |
| 20 | 0.2589 | 0.0806 | 0.2981 | 3.180 | 0.0084 | 11.8783 |
| 25 | 0.3423 | 0.0870 | 0.3562 | 3.192 | 0.0684 | 17.3509 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaplanoglu, E.; Akgun, G. Data-Driven Predictive Control of Exoskeleton for Hand Rehabilitation with Subspace Identification. Sensors 2022, 22, 7645. https://doi.org/10.3390/s22197645
Kaplanoglu E, Akgun G. Data-Driven Predictive Control of Exoskeleton for Hand Rehabilitation with Subspace Identification. Sensors. 2022; 22(19):7645. https://doi.org/10.3390/s22197645
Chicago/Turabian StyleKaplanoglu, Erkan, and Gazi Akgun. 2022. "Data-Driven Predictive Control of Exoskeleton for Hand Rehabilitation with Subspace Identification" Sensors 22, no. 19: 7645. https://doi.org/10.3390/s22197645
APA StyleKaplanoglu, E., & Akgun, G. (2022). Data-Driven Predictive Control of Exoskeleton for Hand Rehabilitation with Subspace Identification. Sensors, 22(19), 7645. https://doi.org/10.3390/s22197645