


RSU-Based Online Intrusion Detection and Mitigation for VANET

Abstract
1. Introduction
1.1. False Data Injection Attacks Targeting Integrity
1.2. DDoS Attacks Targeting Availability
1.3. Contributions
- A novel machine learning detector for RSU is proposed for FDI and DDoS attacks.
- The asymptotic false alarm rate of the proposed detector is analyzed, and a closed-form expression for the detection threshold is derived based on this analysis.
- Based on the detection method, an anomaly localization and accordingly attack mitigation method is proposed for FDI and DDoS attacks for VANET.
- Performance of the proposed detection and mitigation methods are extensively evaluated using state-of-the-art traffic simulators and a real traffic dataset. To the best of our knowledge, this is the first work to use real traffic data in the cybersecurity literature for VANET.
2. Related Work
2.1. False Data Injection Attacks
2.2. Denial-of-Service Attacks
2.3. Comparisons
3. System Model
3.1. VANET Model
3.2. Attack Model
3.2.1. False Data Injection Attacks
3.2.2. Distributed Denial-of-Service Attacks
4. Proposed Intrusion Detection and Mitigation Systems
4.1. Challenges in VANET for an IDS
- (C1)
- Unknown attack patterns: As opposed to the traditional computer networks and the Internet, the possible attack patterns (i.e., signatures) are mostly unknown in the emerging field of ITS/VANET security. Hence, conventional signature-based IDS, which can only detect the known attack signatures, and supervised anomaly-based IDS are, in general, not suitable for VANET.
- (C2)
- Disparate data types: Since anomalies occur relative to the context defined by the entire data dimensions, they should ideally be jointly monitored through multivariate analysis. However, due to the disparate data types conveyed in messages, the multivariate probability distribution of the message content is quite complicated. For instance, speed data are numerical, direction is angular, and position is numerical/angular. As a result, parametric anomaly detection methods, which try to fit tractable probability distributions to the training data, are not feasible here.
- (C3)
- Timely and minimally invasive mitigation: Considering the life-threatening and economic concerns of a failure in VANET communications, cyberattacks should be quickly mitigated in a minimally invasive manner. The identification of malicious users should also be accurate such that legitimate users continue receiving regular service. It is known that sequential methods are much more effective in timely detection than sample-by-sample outlier detection methods [59].
4.2. Proposed Detection and Mitigation Method for FDI attack
| Algorithm 1:Proposed detection and localization algorithm |
|
4.3. Proposed Detection and Mitigation Method for DDoS
4.4. Computational Complexity
5. Performance Evaluation
5.1. Detection Results for FDI Attack
5.1.1. Experiment Setup
5.1.2. Results
5.2. Detection Results for DDoS Attack
5.2.1. Experiment Setup
5.2.2. Results
5.3. Localization Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Hasrouny, H.; Samhat, A.E.; Bassil, C.; Laouiti, A. VANet security challenges and solutions: A survey. Veh. Commun. 2017, 7, 7–20. [Google Scholar] [CrossRef]
- Amoozadeh, M.; Raghuramu, A.; Chuah, C.N.; Ghosal, D.; Zhang, H.M.; Rowe, J.; Levitt, K. Security vulnerabilities of connected vehicle streams and their impact on cooperative driving. IEEE Commun. Mag. 2015, 53, 126–132. [Google Scholar] [CrossRef]
- Hakak, S.; Gadekallu, T.R.; Ramu, S.P.; Maddikunta, P.K.R.; de Alwis, C.; Liyanage, M. Autonomous Vehicles in 5G and beyond: A Survey. arXiv 2022, arXiv:2207.10510. [Google Scholar]
- Uhlemann, E. The battle of technologies or the battle of business models? [Connected vehicles]. IEEE Veh. Technol. Mag. 2018, 13, 14–18. [Google Scholar] [CrossRef]
- Mannoni, V.; Berg, V.; Sesia, S.; Perraud, E. A comparison of the V2X communication systems: ITS-G5 and C-V2X. In Proceedings of the 2019 IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019; pp. 1–5. [Google Scholar]
- Lee, J.; Ahn, S. Adaptive Configuration of Mobile Roadside Units for the Cost-Effective Vehicular Communication Infrastructure. Wirel. Commun. Mob. Comput. 2019, 2019, 6594084. [Google Scholar] [CrossRef]
- Alrehan, A.M.; Alhaidari, F.A. Machine Learning Techniques to Detect DDoS Attacks on VANET System: A Survey. In Proceedings of the 2019 2nd International Conference on Computer Applications & Information Security (ICCAIS), Riyadh, Saudi Arabia, 19–21 March 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Xu, X.; Wang, Y.; Wang, P. Comprehensive Review on Misbehavior Detection for Vehicular Ad Hoc Networks. J. Adv. Transp. 2022, 2022, 4725805. [Google Scholar] [CrossRef]
- Soleymani, S.A.; Abdullah, A.H.; Hassan, W.H.; Anisi, M.H.; Goudarzi, S.; Baee, M.A.R.; Mandala, S. Trust management in vehicular ad hoc network: A systematic review. EURASIP J. Wirel. Commun. Netw. 2015, 2015, 146. [Google Scholar] [CrossRef]
- Khan, U.; Agrawal, S.; Silakari, S. A detailed survey on misbehavior node detection techniques in vehicular ad hoc networks. In Information Systems Design and Intelligent Applications; Springer: Berlin/Heidelberg, Germany, 2015; pp. 11–19. [Google Scholar]
- Zhang, C.; Cai, Z.; Chen, W.; Luo, X.; Yin, J. Flow level detection and filtering of low-rate DDoS. Comput. Netw. 2012, 56, 3417–3431. [Google Scholar] [CrossRef]
- Chen, Z.; Yeo, C.K.; Lee, B.S.; Lau, C.T. Power spectrum entropy based detection and mitigation of low-rate DoS attacks. Comput. Netw. 2018, 136, 80–94. [Google Scholar] [CrossRef]
- Boualouache, A.; Engel, T. A Survey on Machine Learning-based Misbehavior Detection Systems for 5G and Beyond Vehicular Networks. arXiv 2022, arXiv:2201.10500. [Google Scholar]
- Wahab, O.A.; Otrok, H.; Mourad, A. A cooperative watchdog model based on Dempster–Shafer for detecting misbehaving vehicles. Comput. Commun. 2014, 41, 43–54. [Google Scholar] [CrossRef]
- Li, X.; Liu, J.; Li, X.; Li, H. A reputation-based secure scheme in vehicular ad hoc networks. Int. J. Grid Util. Comput. 2015, 6, 83–90. [Google Scholar] [CrossRef]
- van der Heijden, R.W.; Dietzel, S.; Leinmüller, T.; Kargl, F. Survey on Misbehavior Detection in Cooperative Intelligent Transportation Systems. IEEE Commun. Surv. Tutor. 2019, 21, 779–811. [Google Scholar] [CrossRef]
- Wex, P.; Breuer, J.; Held, A.; Leinmuller, T.; Delgrossi, L. Trust issues for vehicular ad hoc networks. In Proceedings of the Vehicular Technology Conference, Singapore, 11–14 May 2008; pp. 2800–2804. [Google Scholar]
- Hasrouny, H.; Samhat, A.E.; Bassil, C.; Laouiti, A. Misbehavior detection and efficient revocation within VANET. J. Inf. Secur. Appl. 2019, 46, 193–209. [Google Scholar] [CrossRef]
- Abhishek, N.V.; Lim, T.J. Trust-based adversary detection in edge computing assisted vehicular networks. J. Commun. Netw. 2022, 24, 451–462. [Google Scholar] [CrossRef]
- Ruj, S.; Cavenaghi, M.A.; Huang, Z.; Nayak, A.; Stojmenovic, I. On data-centric misbehavior detection in VANETs. In Proceedings of the Vehicular Technology Conference (VTC Fall), San Francisco, CA, USA, 5–8 September 2011; pp. 1–5. [Google Scholar]
- Ghaleb, F.A.; Maarof, M.A.; Zainal, A.; Al-Rimy, B.A.S.; Saeed, F.; Al-Hadhrami, T. Hybrid and Multifaceted Context-Aware Misbehavior Detection Model for Vehicular Ad Hoc Network. IEEE Access 2019, 7, 159119–159140. [Google Scholar] [CrossRef]
- Sharshembiev, K.; Yoo, S.M.; Elmahdi, E.; Kim, Y.K.; Jeong, G.H. Fail-Safe Mechanism Using Entropy Based Misbehavior Classification and Detection in Vehicular Ad Hoc Networks. In Proceedings of the 2019 International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Atlanta, GA, USA, 14–17 July 2019; pp. 123–128. [Google Scholar]
- Guo, J.; Li, X.; Liu, Z.; Ma, J.; Yang, C.; Zhang, J.; Wu, D. TROVE: A context-awareness trust model for VANETs using reinforcement learning. IEEE Internet Things J. 2020, 7, 6647–6662. [Google Scholar] [CrossRef]
- Sedjelmaci, H.; Senouci, S.M.; Abu-Rgheff, M.A. An efficient and lightweight intrusion detection mechanism for service-oriented vehicular networks. IEEE Internet Things J. 2014, 1, 570–577. [Google Scholar] [CrossRef]
- Sedjelmaci, H.; Senouci, S.M.; Bouali, T. Predict and prevent from misbehaving intruders in heterogeneous vehicular networks. Veh. Commun. 2017, 10, 74–83. [Google Scholar] [CrossRef][Green Version]
- Zaidi, K.; Milojevic, M.B.; Rakocevic, V.; Nallanathan, A.; Rajarajan, M. Host-Based Intrusion Detection for VANETs: A Statistical Approach to Rogue Node Detection. IEEE Trans. Veh. Technol. 2016, 65, 6703–6714. [Google Scholar] [CrossRef]
- Liang, J.; Lin, Q.; Chen, J.; Zhu, Y. A Filter Model Based on Hidden Generalized Mixture Transition Distribution Model for Intrusion Detection System in Vehicle Ad Hoc Networks. IEEE Trans. Intell. Transp. Syst. 2019, 10, 2707–2722. [Google Scholar] [CrossRef]
- Eziama, E.; Tepe, K.; Balador, A.; Nwizege, K.S.; Jaimes, L.M. Malicious Node Detection in Vehicular Ad-Hoc Network Using Machine Learning and Deep Learning. In Proceedings of the 2018 IEEE Globecom Workshops (GC Wkshps), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar]
- So, S.; Sharma, P.; Petit, J. Integrating Plausibility Checks and Machine Learning for Misbehavior Detection in VANET. In Proceedings of the 2018 17th IEEE International Conference on Machine Learning and Applications (ICMLA), Orlando, FL, USA, 17–20 December 2018; pp. 564–571. [Google Scholar] [CrossRef]
- Gyawali, S.; Qian, Y. Misbehavior Detection using Machine Learning in Vehicular Communication Networks. In Proceedings of the ICC 2019—2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Nguyen, V.L.; Lin, P.C.; Hwang, R.H. Enhancing misbehavior detection in 5G vehicle-to-vehicle communications. IEEE Trans. Veh. Technol. 2020, 69, 9417–9430. [Google Scholar] [CrossRef]
- van der Heijden, R.W.; Lukaseder, T.; Kargl, F. Veremi: A dataset for comparable evaluation of misbehavior detection in vanets. In Proceedings of the International Conference on Security and Privacy in Communication Systems, Singapore, 8–10 August 2018; pp. 318–337. [Google Scholar]
- So, S.; Petit, J.; Starobinski, D. Physical Layer Plausibility Checks for Misbehavior Detection in V2X Networks. In Proceedings of the 12th Conference on Security and Privacy in Wireless and Mobile Networks, Miami, FL, USA, 15–17 May 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 84–93. [Google Scholar] [CrossRef]
- Singh, P.K.; Gupta, S.; Vashistha, R.; Nandi, S.K.; Nandi, S. Machine Learning Based Approach to Detect Position Falsification Attack in VANETs. In Proceedings of the International Conference on Security & Privacy, Jaipur, India, 9–11 January 2019; pp. 166–178. [Google Scholar]
- Sharma, P.; Liu, H. A machine-learning-based data-centric misbehavior detection model for internet of vehicles. IEEE Internet Things J. 2020, 8, 4991–4999. [Google Scholar] [CrossRef]
- Ercan, S.; Ayaida, M.; Messai, N. Misbehavior detection for position falsification attacks in VANETs using machine learning. IEEE Access 2021, 10, 1893–1904. [Google Scholar] [CrossRef]
- Ullah, S.; Khan, M.A.; Ahmad, J.; Jamal, S.S.; e Huma, Z.; Hassan, M.T.; Pitropakis, N.; Buchanan, W.J. HDL-IDS: A hybrid deep learning architecture for intrusion detection in the Internet of Vehicles. Sensors 2022, 22, 1340. [Google Scholar] [CrossRef] [PubMed]
- Yu, Y.; Zeng, X.; Xue, X.; Ma, J. LSTM-Based Intrusion Detection System for VANETs: A Time Series Classification Approach to False Message Detection. IEEE Trans. Intell. Transp. Syst. 2022, 1–13. [Google Scholar] [CrossRef]
- Parkinson, S.; Ward, P.; Wilson, K.; Miller, J. Cyber Threats Facing Autonomous and Connected Vehicles: Future Challenges. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2898–2915. [Google Scholar] [CrossRef]
- Soryal, J.; Saadawi, T. DoS attack detection in Internet-connected vehicles. In Proceedings of the 2013 International Conference on Connected Vehicles and Expo (ICCVE), Las Vegas, NV, USA, 2–6 December 2013; pp. 7–13. [Google Scholar] [CrossRef]
- Verma, K.; Hasbullah, H.; Kumar, A. Prevention of DoS attacks in VANET. Wirel. Pers. Commun. 2013, 73, 95–126. [Google Scholar] [CrossRef]
- Mokdad, L.; Ben-Othman, J.; Nguyen, A.T. DJAVAN: Detecting jamming attacks in Vehicle Ad hoc Networks. Perform. Eval. 2015, 87, 47–59. [Google Scholar] [CrossRef]
- Kerrache, C.A.; Lagraa, N.; Calafate, C.T.; Lakas, A. TFDD: A trust-based framework for reliable data delivery and DoS defense in VANETs. Veh. Commun. 2017, 9, 254–267. [Google Scholar] [CrossRef]
- Zhang, T.; Xu, C.; Zou, P.; Tian, H.; Kuang, X.; Yang, S.; Zhong, L.; Niyato, D. How to Mitigate DDoS Intelligently in SD-IoV: A Moving Target Defense Approach. IEEE Trans. Ind. Inform. 2022, 1–10. [Google Scholar] [CrossRef]
- Gaurav, A.; Gupta, B.; Peñalvo, F.J.G.; Nedjah, N.; Psannis, K. Ddos attack detection in vehicular ad-hoc network (vanet) for 5g networks. In Security and Privacy Preserving for IoT and 5G Networks; Springer: Berlin/Heidelberg, Germany, 2022; pp. 263–278. [Google Scholar]
- Karagiannis, D.; Argyriou, A. Jamming attack detection in a pair of RF communicating vehicles using unsupervised machine learning. Veh. Commun. 2018, 13, 56–63. [Google Scholar] [CrossRef]
- Lyamin, N.; Kleyko, D.; Delooz, Q.; Vinel, A. AI-Based Malicious Network Traffic Detection in VANETs. IEEE Netw. 2018, 32, 15–21. [Google Scholar] [CrossRef]
- Kolandaisamy, R.; Md Noor, R.; Ahmedy, I.; Ahmad, I.; Reza Z’aba, M.; Imran, M.; Alnuem, M. A multivariant stream analysis approach to detect and mitigate DDoS attacks in vehicular ad hoc networks. Wirel. Commun. Mob. Comput. 2018, 2018, 2874509. [Google Scholar] [CrossRef]
- Türkoğlu, M.; Polat, H.; Koçak, C.; Polat, O. Recognition of DDoS Attacks on SD-VANET Based on Combination of Hyperparameter Optimization and Feature Selection. Expert Syst. Appl. 2022, 203, 117500. [Google Scholar] [CrossRef]
- Adhikary, K.; Bhushan, S.; Kumar, S.; Dutta, K. Hybrid algorithm to detect DDoS attacks in VANETs. Wirel. Pers. Commun. 2020, 114, 3613–3634. [Google Scholar] [CrossRef]
- Kadam, N.; Krovi, R.S. Machine Learning Approach of Hybrid KSVN Algorithm to Detect DDoS Attack in VANET. Int. J. Adv. Comput. Sci. Appl. 2021, 12. [Google Scholar] [CrossRef]
- Anyanwu, G.O.; Nwakanma, C.I.; Lee, J.M.; Kim, D.S. Optimization of RBF-SVM Kernel using Grid Search Algorithm for DDoS Attack Detection in SDN-based VANET. IEEE Internet Things J. 2022. [Google Scholar] [CrossRef]
- Haydari, A.; Yilmaz, Y. Real-Time Detection and Mitigation of DDoS Attacks in Intelligent Transportation Systems. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 157–163. [Google Scholar]
- Wahab, O.A.; Mourad, A.; Otrok, H.; Bentahar, J. CEAP: SVM-based intelligent detection model for clustered vehicular ad hoc networks. Expert Syst. Appl. 2016, 50, 40–54. [Google Scholar] [CrossRef]
- Yu, B.; Xu, C.Z.; Xiao, B. Detecting sybil attacks in VANETs. J. Parallel Distrib. Comput. 2013, 73, 746–756. [Google Scholar] [CrossRef]
- Nexusguard. DDoS Threat Report 2019 Q3 [Online]. Available online: https://tinyurl.com/25juf7ma (accessed on 29 August 2022).
- Baker, M. Statisticians issue warning over misuse of P values. Nature 2016, 531, 151. [Google Scholar] [CrossRef] [PubMed]
- Basseville, M.; Nikiforov, I.V. Detection of Abrupt Changes: Theory and Application; Prentice Hall: Englewood Cliffs, NJ, USA, 1993; Volume 104. [Google Scholar]
- Poor, H.V.; Hadjiliadis, O. Quickest Detection; Cambridge University Press: Cambridge, UK, 2009; Volume 40. [Google Scholar]
- Yilmaz, Y. Online nonparametric anomaly detection based on geometric entropy minimization. In Proceedings of the 2017 IEEE International Symposium on Information Theory (ISIT), Aachen, Germany, 25–30 June 2017; pp. 3010–3014. [Google Scholar]
- Hero, A.O. Geometric entropy minimization (GEM) for anomaly detection and localization. In Proceedings of the Advances in Neural Information Processing Systems, Vancouver, BC, Canada, 3–6 December 2007; pp. 585–592. [Google Scholar]
- Poor, H.V. An Introduction to Signal Detection and Estimation; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Ward, J.; Worrall, S.; Agamennoni, G.; Nebot, E. The warrigal dataset: Multi-vehicle trajectories and v2v communications. IEEE Intell. Transp. Syst. Mag. 2014, 6, 109–117. [Google Scholar] [CrossRef]
- Varga, A.; Hornig, R. An overview of the OMNeT++ simulation environment. In Proceedings of the 1st International Conference on Simulation Tools and Techniques for Communications, Networks and Systems & Workshops, Marseille, France, 3–7 March 2008; p. 60. [Google Scholar]
- Behrisch, M.; Bieker, L.; Erdmann, J.; Krajzewicz, D. SUMO–simulation of urban mobility: An overview. In Proceedings of the SIMUL 2011, The Third International Conference on Advances in System Simulation, ThinkMind, Barcelona, Spain, 23–29 October 2011. [Google Scholar]
- Sommer, C.; German, R.; Dressler, F. Bidirectionally Coupled Network and Road Traffic Simulation for Improved IVC Analysis. IEEE Trans. Mob. Comput. 2011, 10, 3–15. [Google Scholar] [CrossRef]
- Jiang, D.; Delgrossi, L. IEEE 802.11 p: Towards an international standard for wireless access in vehicular environments. In Proceedings of the Vehicular Technology Conference, Singapore, 11–14 May 2008; pp. 2036–2040. [Google Scholar]
- Guo, Y.; Lee, I. Forensic analysis of DoS attack traffic in MANET. In Proceedings of the 2010 4th International Conference on IEEE Network and System Security (NSS), Melbourne, Australia, 1–3 September 2010; pp. 293–298. [Google Scholar]
- Mei, Y. Efficient scalable schemes for monitoring a large number of data streams. Biometrika 2010, 97, 419–433. [Google Scholar] [CrossRef]
- Chiu, S.N.; Stoyan, D.; Kendall, W.S.; Mecke, J. Stochastic Geometry and Its Applications; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Scott, T.C.; Fee, G.; Grotendorst, J. Asymptotic series of generalized Lambert W function. ACM Commun. Comput. Algebra 2014, 47, 75–83. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
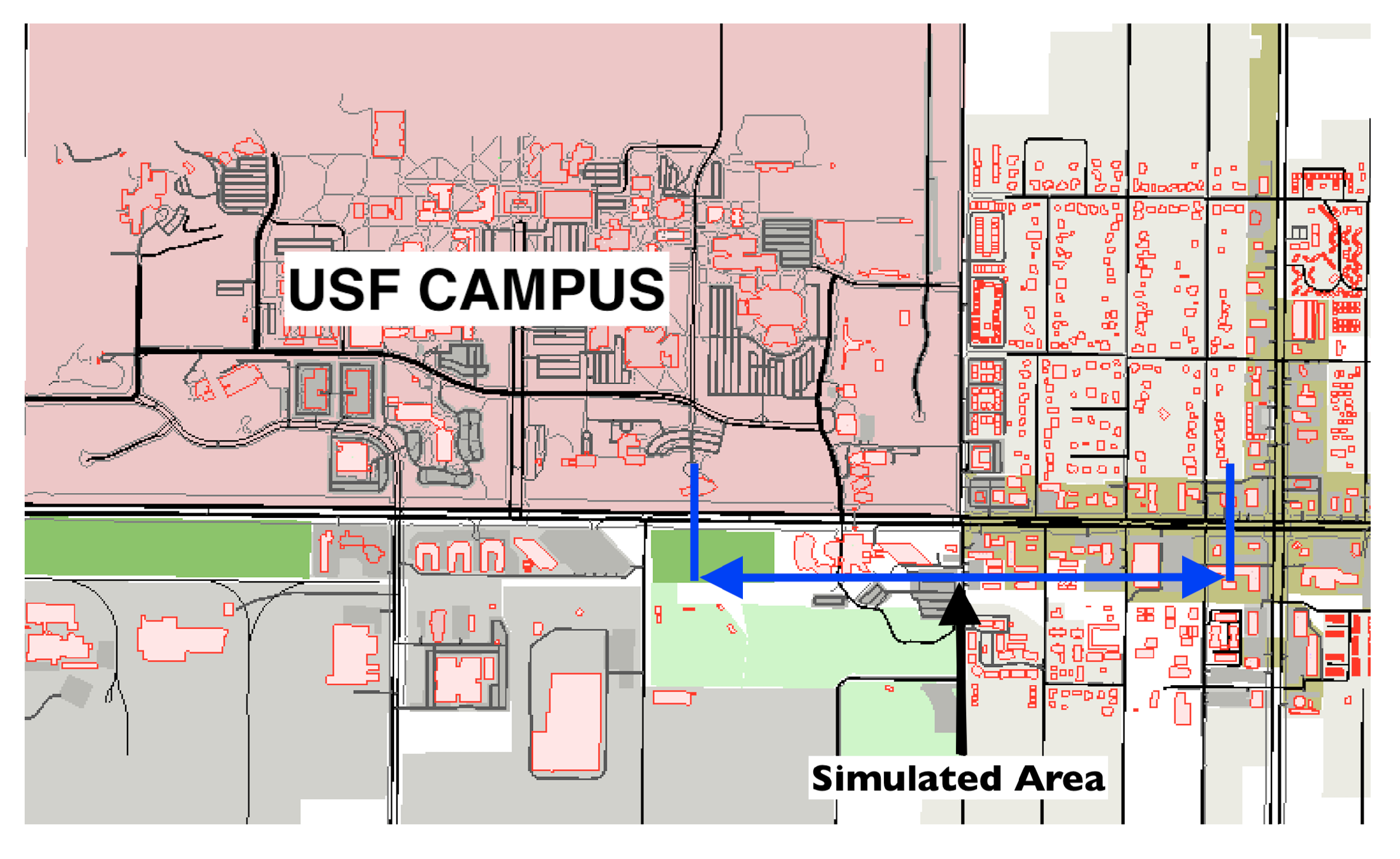
| Simulation Area | 9000 × 5000 m |
|---|---|
| Simulation Time (Each Trial) | 200 s |
| Number of Trials | 600 |
| Average Number of Vehicle | 250 |
| Traffic Generation | Random |
| Route Generation | Random |
| Network Protocol | IEEE 802.11p |
| Beacon Rate | 1 s |
| Network Interface | OMNET++ |
| Network Mobility Framework | Veins |
| Traffic Generator | SUMO |
| Map | Fowler Av. Tampa, FL |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Haydari, A.; Yilmaz, Y. RSU-Based Online Intrusion Detection and Mitigation for VANET. Sensors 2022, 22, 7612. https://doi.org/10.3390/s22197612
Haydari A, Yilmaz Y. RSU-Based Online Intrusion Detection and Mitigation for VANET. Sensors. 2022; 22(19):7612. https://doi.org/10.3390/s22197612
Chicago/Turabian StyleHaydari, Ammar, and Yasin Yilmaz. 2022. "RSU-Based Online Intrusion Detection and Mitigation for VANET" Sensors 22, no. 19: 7612. https://doi.org/10.3390/s22197612
APA StyleHaydari, A., & Yilmaz, Y. (2022). RSU-Based Online Intrusion Detection and Mitigation for VANET. Sensors, 22(19), 7612. https://doi.org/10.3390/s22197612