


Current Ratio and Stability Issues of Electronically Enhanced Current Transformer Stimulated by Stray Inter-Winding Capacitance and Secondary-Side Disturbance Voltage


Abstract
:
1. Introduction
2. Construction and Modelling of the EECT
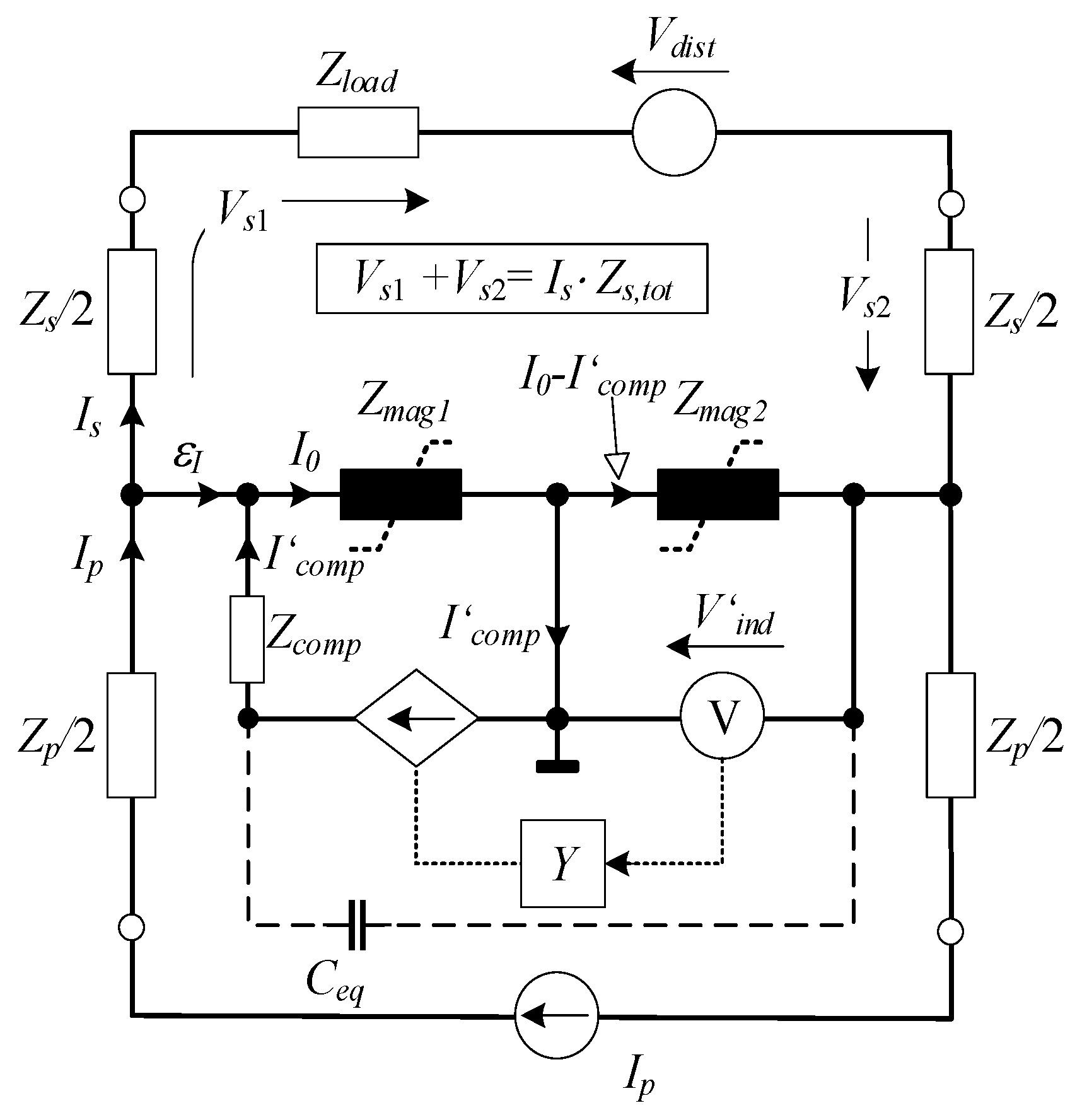
EECT Current Error Derivation
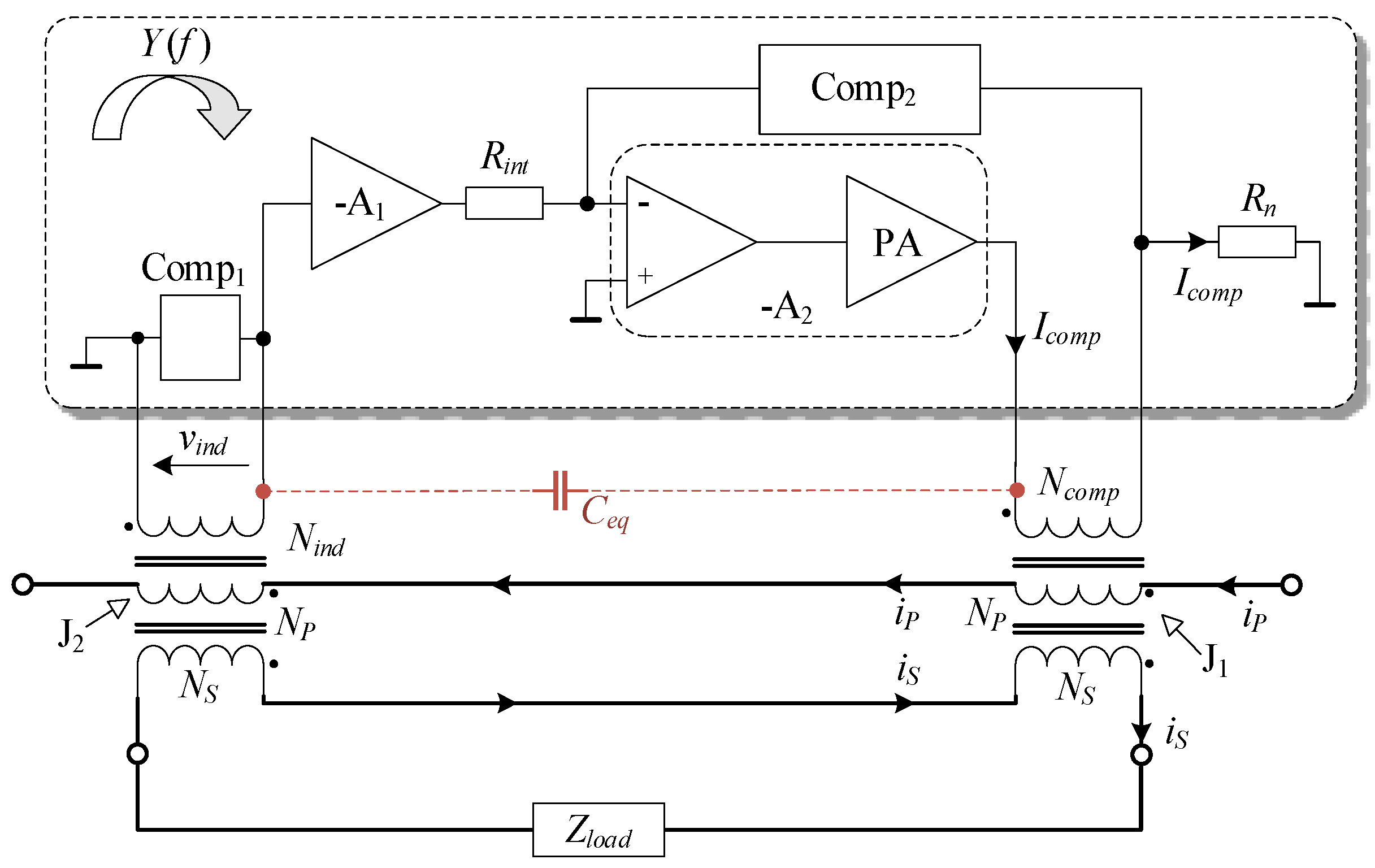
3. Description of the Electronic Unit
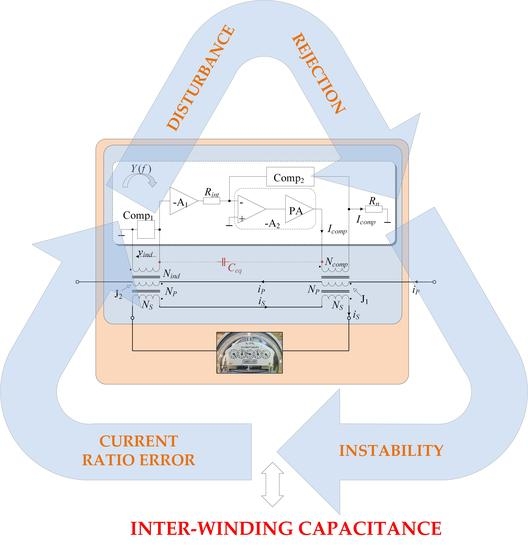
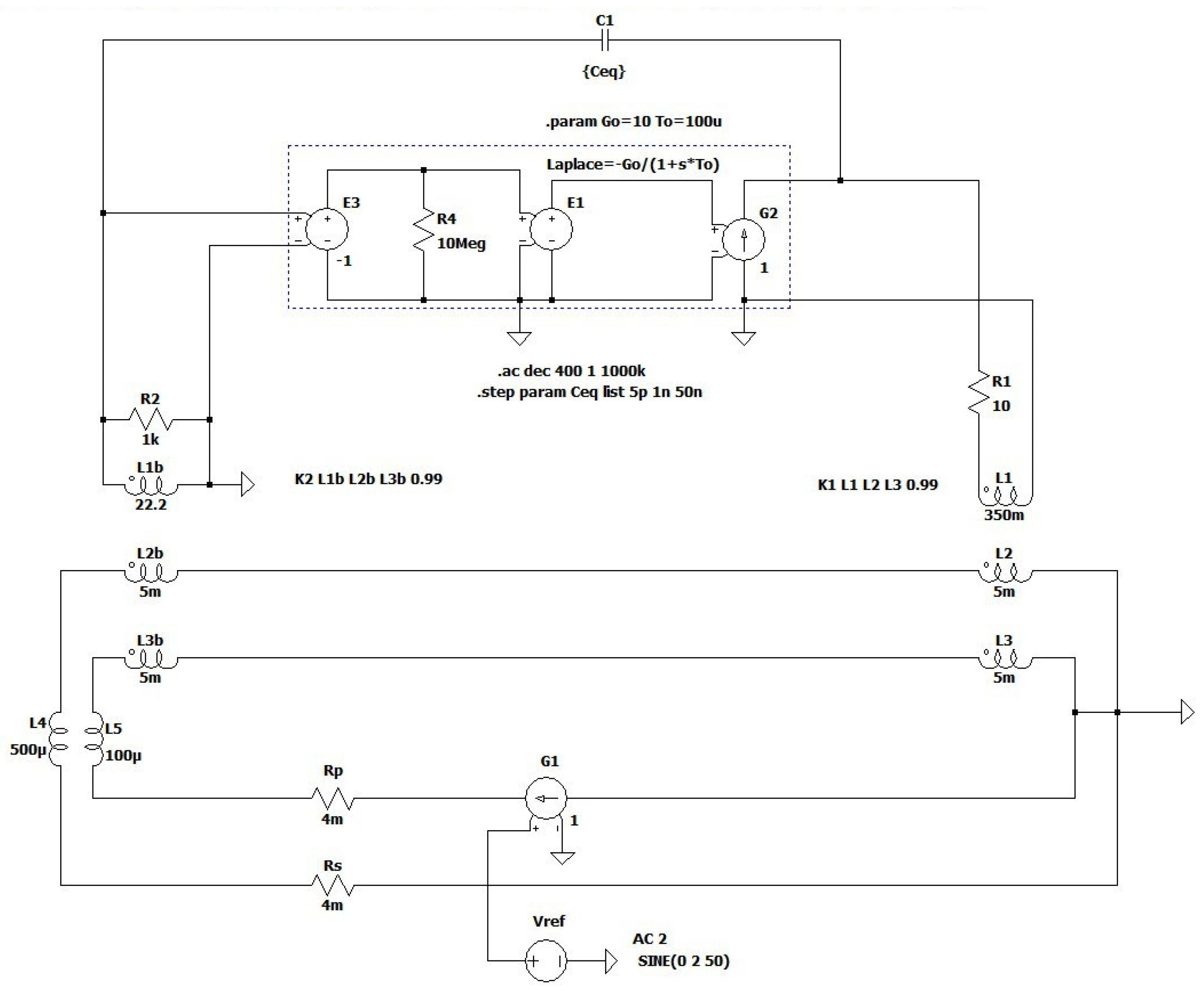
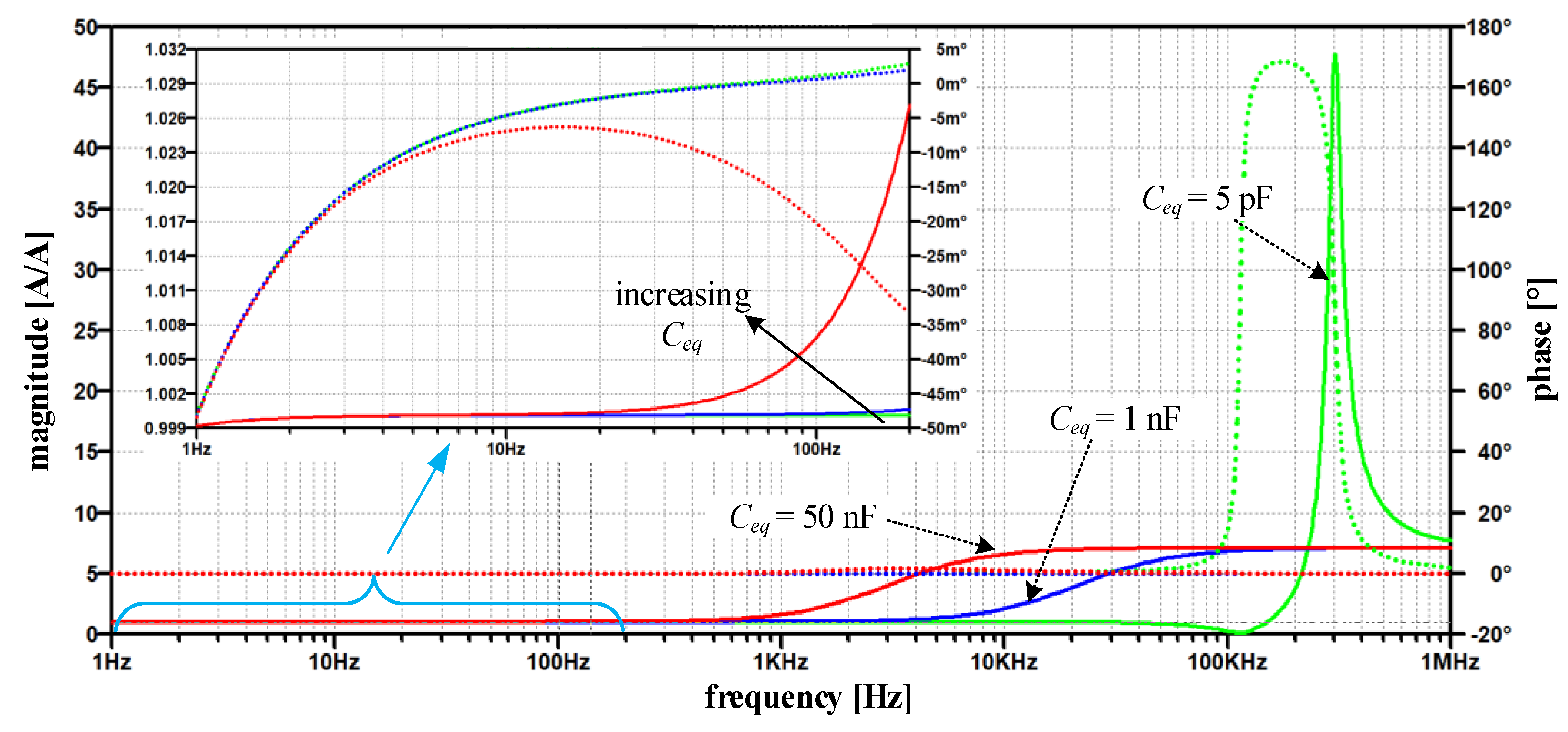
3.1. Stray Inter-Winding Capacitances
3.2. Disturbance Rejection Capability
3.3. Compensating Networks Guidelines
- In frequency bandwidth extending up to the 20th harmonic of the maximum value of nominal frequency (65 Hz), the TC amplifier gain (Y) must be considerably large with a negligible phase shift—both quantities are primarily subjected to Comp2;
- To substantially decrease the EECT’s magnitude error (6), the following Y · Zmag1 · Zmag2 >> Zmag1+ Zmag2 + Zs,tot must be fulfilled;
- To attain negligible phase error, the imaginary part of Y· Zmag2 must be zero. As Zmag2 is inductive, the Comp1 is mandatory to compensate for its phase shift;
- Due to differences in throughput power, the Zmag2 > Zmag1 is preferred.
4. Experimental Results
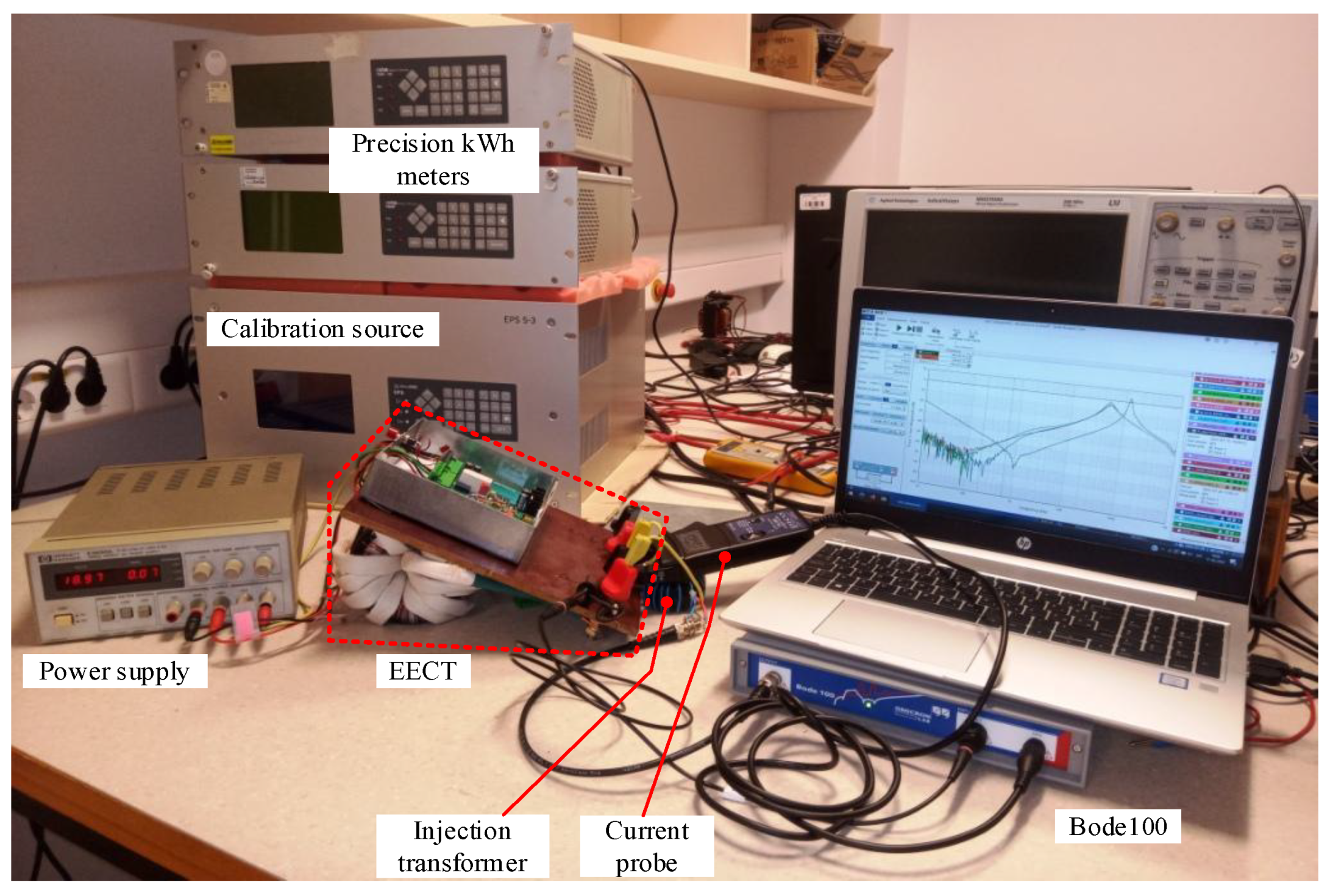
4.1. The Y Frequency Response Measurement
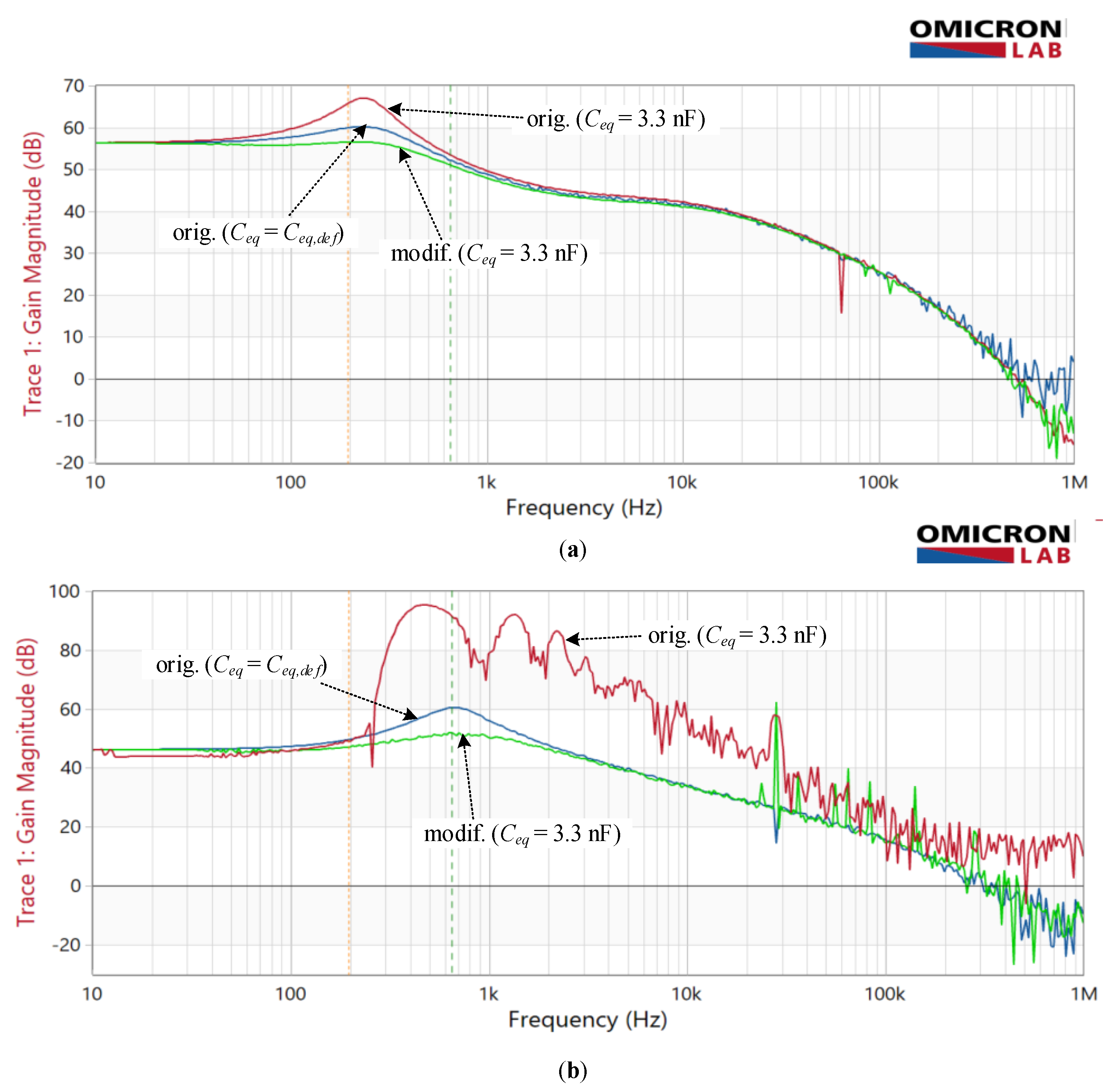
4.2. Disturbance Rejection Measurement
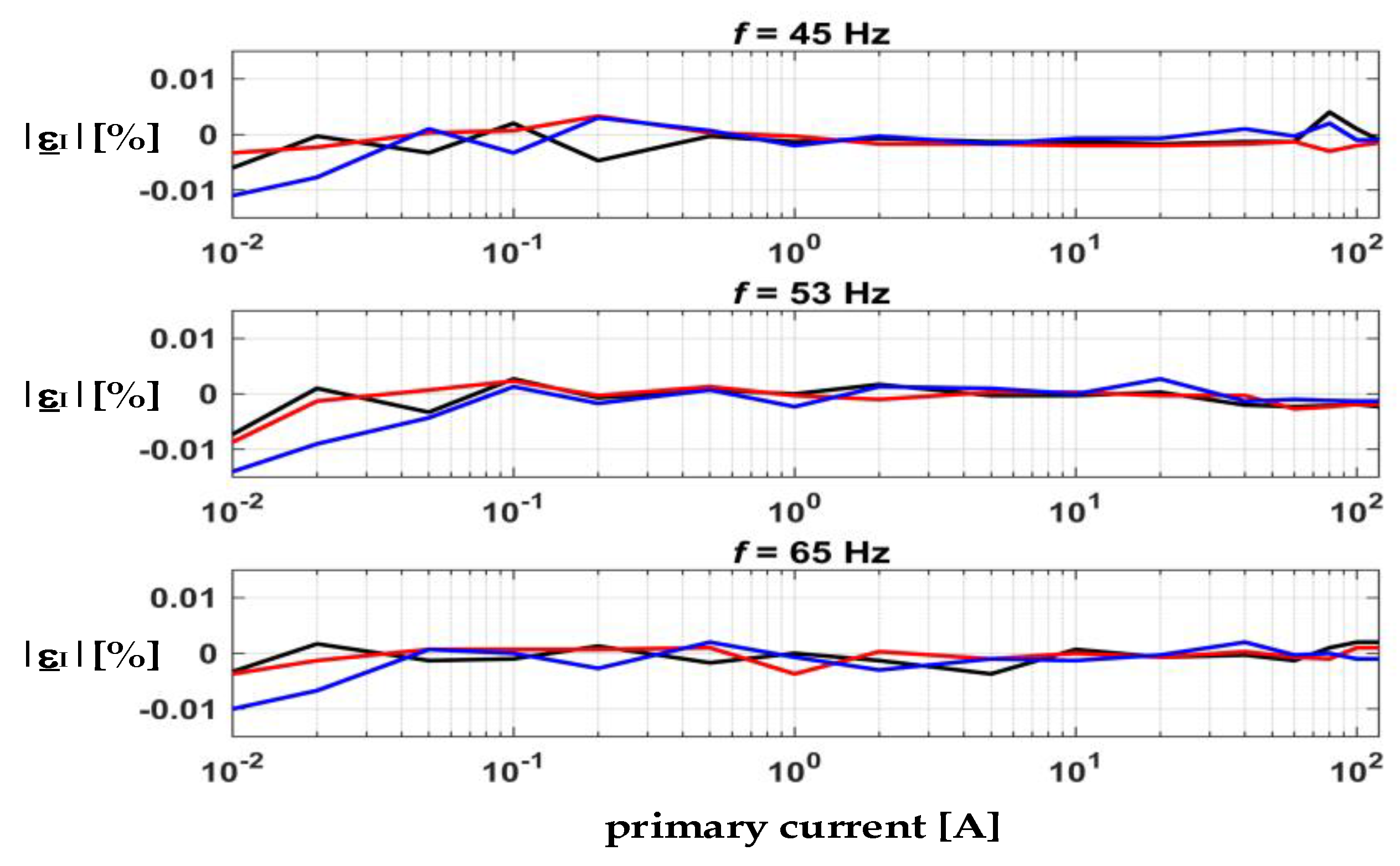
4.3. The Experimental Summary
5. Discussion
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Locci, N.; Muscas, C. A digital compensation method for improving current transformer accuracy. IEEE Trans. Power Deliv. 2000, 15, 1104–1109. [Google Scholar] [CrossRef]
- Crotti, G.; Chen, Y.; Çayci, H.; D’Avanzo, G.; Landi, C.; Letizia, P.S.; Luiso, M.; Mohns, E.; Muñoz, F.; Styblikova, R.; et al. How Instrument Transformers Influence Power Quality Measurements: A Proposal of Accuracy Verification Tests. Sensors 2022, 22, 5847. [Google Scholar] [CrossRef] [PubMed]
- Kaczmarek, M.; Szczęsny, A.; Stano, E. Operation of the Electronic Current Transformer for Transformation of Distorted Current Higher Harmonics. Energies 2022, 15, 4368. [Google Scholar] [CrossRef]
- Lesniewska, E.E.; Rajchert, R. Application of the Field-Circuit Method for the Computation of Measurement Properties of Current Transformers With Cores Consisting of Different Magnetic Materials. IEEE Trans. Magn. 2010, 46, 3778–3782. [Google Scholar] [CrossRef]
- So, E.; Verhoeven, R.; Simons, B.; Parks, H.V.; Angelo, D. A High-Precision Current Transformer for Loss Measurements of EHV Shunt Reactors. IEEE Trans. Instrum. Meas. 2019, 68, 1680–1687. [Google Scholar] [CrossRef]
- So, E.; Bennett, D.A. Current Ratio Device for Use in Forming a Current Transformer. U.S. Patent US5896027A, 20 April 1999. Available online: https://patents.google.com/patent/US5896027A/en (accessed on 9 August 2022).
- Takahashi, K. Evaluation of errors in a current comparator system used for current transformer testing. IEEE Trans. Instrum. Meas. 1989, 38, 402–406. [Google Scholar] [CrossRef]
- West, J.; Miljanic, P. An improved two-stage current transformer. IEEE Trans. Instrum. Meas. 1991, 40, 633–635. [Google Scholar] [CrossRef]
- Slomovitz, D.; Trigo, L.; Faverio, C. Two-Stage Current Transformer with Electronic Compensation. Acta IMEKO 2012, 1, 85–88. [Google Scholar] [CrossRef]
- Miljanic, P.; So, E.; Moore, W. An electronically enhanced magnetic core for current transformers. IEEE Trans. Instrum. Meas. 1991, 40, 410–414. [Google Scholar] [CrossRef]
- Slomovitz, D.; Santos, A. A self-calibrating instrument current transformer. Measurement 2012, 45, 2213–2217. [Google Scholar] [CrossRef]
- McNeill, N.; Dymond, H.; Mellor, P.H. High-Fidelity Low-Cost Electronic Current Sensor for Utility Power Metering. IEEE Trans. Power Deliv. 2011, 26, 2309–2317. [Google Scholar] [CrossRef]
- Slomovitz, D.; Trigo, L.; Faverio, C. Error compensation of capacitive effects in current transformers. In Proceedings of the 2012 Conference on Precision electromagnetic Measurements, Washington, DC, USA, 1–6 July 2012; pp. 158–159. [Google Scholar] [CrossRef]
- Slomovitz, D.; de Souza, H. Shielded Electronic Current Transformer. IEEE Trans. Instrum. Meas. 2005, 54, 500–502. [Google Scholar] [CrossRef]
- Koch, M.; Anglhuber, M. Experiences with Measurement and Analysis of the Dielectric Response of Instrument Transformers. In Proceedings of the 2018 IEEE International Conference on High Voltage Engineering and Application (ICHVE), Athens, Greece, 10–13 September 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Ostergaard, C.; Kjeldsen, C.; Nymand, M. Simple Equivalent Circuit Capacitance Model for Two-Winding Transformers. In Proceedings of the 2020 IEEE Vehicle Power and Propulsion Conference (VPPC), Gijon, Spain, 18 November–16 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Tsolaridis, G.; Seiler, P.; Biela, J. High Sensitivity Current Transformer with low Settling Time, for Magnified AC Current Measurements in Pulsed Applications. In Proceedings of the 2020 22nd European Conference on Power Electronics and Applications (EPE’20 ECCE Europe), Lyon, France, 7–11 September 2020; pp. P.1–P.10. [Google Scholar] [CrossRef]
- Xiong, K.; Yue, C.; Yu, J.; Li, H.; Zhu, K. Study on Capacitive Leakage Error of Current Transformer in Distribution Network: Theory and Testing. In Proceedings of the 2019 IEEE Sustainable Power and Energy Conference (iSPEC), Beijing, China, 21–23 November 2019; pp. 2713–2717. [Google Scholar] [CrossRef]
- Bittanti, S.; Cuzzola, F.; Lorito, F.; Poncia, G. Compensation of nonlinearities in a current transformer for the reconstruction of the primary current. IEEE Trans. Control Syst. Technol. 2001, 9, 565–573. [Google Scholar] [CrossRef]
- Kaczmarek, M. The source of the inductive current transformers metrological properties deterioration for transformation of distorted currents. Electr. Power Syst. Res. 2014, 107, 45–50. [Google Scholar] [CrossRef]
- IEC 62057-1 Ed.1.0; Test Equipment, Techniques and Procedures for Electrical Energy Meters—Part 1: Stationary Meter Test Units (MTU). DKE Deutsche Kommission Elektrotechnik: Frankfurt am Main, Germany, 2020.
- Franco, S. Design with Operational Amplifiers and Analog Integrated Circuits; McGraw-Hill: New York, NY, USA, 2002. [Google Scholar]
- Gupta, A.; Dhanasekaran, V.; Soundarapandian, K.; Sanchez-Sinencio, E. Multipath common-mode feedback scheme suitable for high-frequency two-stage amplifiers. Electron. Lett. 2006, 42, 499–500. [Google Scholar] [CrossRef]
- Eschauzier, R.G.H.; Huijsing, J.H. Frequency Compensation Techniques for Low-Power Operational Amplifiers; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1995. [Google Scholar] [CrossRef]
- Middlebrook, R.D. Measurement of loop gain in feedback systems†. Int. J. Electron. 1975, 38, 485–512. [Google Scholar] [CrossRef]
- Vector Network Analyzer Bode 100|OMICRON Lab. Available online: https://www.omicron-lab.com/products/vector-network-analysis/bode-100 (accessed on 9 August 2022).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Parameters | Requirements | ||
|---|---|---|---|
| Current range | 10 mA up to 120 A | ||
| Nominal frequency | 45 Hz up to 65 Hz | ||
| Ratio | 1:1 | ||
| Power rating | Max. 60 VA at 120 A, max. load voltage 0.5 V over whole current range | ||
| Current range | Ratio error (%) | Phase angle error (min) | |
| Accuracy | 1 mA ≤ I ≤ 10 mA | 1 | 50 |
| 10 mA ≤ I ≤ 25 mA | 0.5 | 20 | |
| 25 mA ≤ I ≤ 150 mA | 0.2 | 10 | |
| 150 mA ≤ I ≤ 120 A | 0.05 | 3 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zajec, P. Current Ratio and Stability Issues of Electronically Enhanced Current Transformer Stimulated by Stray Inter-Winding Capacitance and Secondary-Side Disturbance Voltage. Sensors 2022, 22, 7565. https://doi.org/10.3390/s22197565
Zajec P. Current Ratio and Stability Issues of Electronically Enhanced Current Transformer Stimulated by Stray Inter-Winding Capacitance and Secondary-Side Disturbance Voltage. Sensors. 2022; 22(19):7565. https://doi.org/10.3390/s22197565
Chicago/Turabian StyleZajec, Peter. 2022. "Current Ratio and Stability Issues of Electronically Enhanced Current Transformer Stimulated by Stray Inter-Winding Capacitance and Secondary-Side Disturbance Voltage" Sensors 22, no. 19: 7565. https://doi.org/10.3390/s22197565
APA StyleZajec, P. (2022). Current Ratio and Stability Issues of Electronically Enhanced Current Transformer Stimulated by Stray Inter-Winding Capacitance and Secondary-Side Disturbance Voltage. Sensors, 22(19), 7565. https://doi.org/10.3390/s22197565