Abstract
This paper investigates the problem of formation fault-tolerant control of multiple quadrotors (QRs) for a mobile sensing oriented application. The QRs subject to faults, input saturation and time-varying delays can be controlled to perform a target-enclosing and covering task while guaranteeing the state constraints will not be exceeded. A distributed formation control scheme is proposed, using a radial basis function neural network (RBFNN)-based time-delay position controller and an adaptive fault-tolerant attitude controller. The Lyapunov–Krasovskii approach is used to analyze the time-varying delay. Barrier Lyapunov function is deployed to handle the prescribed constraints, and an auxiliary system combined with a command filter is designed to resolve the saturation problem. An RBFNN and adaptive estimators are deployed to provide estimates of disturbances, fault signals and uncertainties. It is proven that all the closed-loop signals are bounded under the proposed protocol, while the prescribed constraints will not be violated, which enhances the flight safety and QR formation’s applicability. Comparative simulations based on application scenarios further verify the effectiveness of the proposed method.
1. Introduction
Formation control technology, which is based on the theory of multi-agent systems (MAS), enables multiple unmanned aerial vehicles (UAVs) to efficiently complete a shared task and is widely used in aerial mapping, atmospheric environment monitoring and even coordinated military missions [1,2,3].
As a typical small-scale UAV, quadrotor (QR) is qualified to be a formation platform for a variety of applications due to its simple structure, strong maneuverability and hovering capability [4], particularly for mobile sensing tasks, such as target-enclosing and covering, which have been studied by several works so far. The main purpose of the former was to control several mobile sensors to rotate around or above a detected target to obtain detailed information from all angles [5,6,7]. The objective of the latter was to optimize the deployment location of multiple sensors to achieve effective coverage of the interest area, where the methods are mainly Voronoi partitioning-based [8,9], coverage cost function-based [10], K-means-based [11] and reinforcement learning-based [12]. However, these methods cannot be directly applied to small-scale aerial platforms due to the contradiction between the complex location optimization algorithms and limited computing resources. In this paper, a consensus-based formation controller was designed. The UAV’s movement and placement can be directly and flexibly set by time-varying formation functions and virtual leader trajectory, which ensures that the mobile sensing task, including the above two, can be performed when the formation tracking is realized by QR members.
With the expansion of formation technology applications, formation operation reliability has become more prominent, with the fault-tolerant control (FTC) being one of the most important factors. Due to the possibility of a topological chain reaction [13,14], a formation composed of multiple interconnected individuals is more susceptible to malfunction effects than a single system. In recent years, formation FTC has garnered considerable interest, and typical methods can be categorized as either active or passive. In the active FTC design, actuator faults are diagnosed, and parameters can be reconfigured online to achieve the desired performance [15]. An iterative learning observer-based reconstructive-FTC protocol for spacecraft formation was designed in [16]. A reinforcement learning-based data-driven active FTC method for multiple QRs was studied in [17]. However, active FTC approaches are also difficult to implement with small UAVs due to their complexity and high computational requirements. In contrast, the passive FTC requires less computational power due to its algorithm’s simplicity [18,19]. The actuator fault effect for multiple aircraft is addressed in [20] using an adaptive scheme. A projection-based adaptive FTC protocol was proposed in [21] for a group of UAV formation systems. In [22], a sliding mode-based adaptive FTC scheme for a heterogeneous MAS is presented. Taking into account the limited computing resources of QRs, the adaptive FTC method is adopted in this paper, which is one of the state-of-the-art FTC methods.
Even though UAV formation FTC has made significant progress, there are still problems, obstacles and limitations to its practical application. The fact that practical engineering systems have limitations is one of them. On the one hand, due to the hardware’s physical limitations, the control forces and torques generated by UAV actuators are naturally constrained, also known as the saturation phenomenon, which may result in a decline in performance [23]. In [24], anti-windup compensators are employed against input saturations of a linear MAS. In [25], an auxiliary dynamic system is introduced to address the saturation problem for multiple UAVs. On the other hand, due to safe operation or system-specific requirements, certain UAV system states must be constrained. For example, Some sensor payloads that directly attached to the UAV frame require that the UAV’s attitude angular velocity be constrained within the sensor’s allowed range, and the pan-tilt-zoom (PTZ) system used to stabilize optical sensors also has constraint requirements on UAV’s attitude states [26]. Such consideration is crucial, particularly when actuator faults exist and may result in constraints being violated. According to [27], the associated state constraint problem for a second-order MAS was resolved using a combination of the barrier function and sliding mode control technique. According to [28], motion and visibility constraint problems for multiple robots were resolved by planning a feasible trajectory. By employing performance function and error transformation, Ref. [29] solved the field of view constraint problem for mobile robots formation. However, without modifying the control structure, the methods in [27,28,29] cannot be applied to unconstrained scenarios. Moreover, the aforementioned two types of constraints are typically studied separately and have never been investigated simultaneously in the formation FTC domain.
In addition, due to the formation network’s limited communication capabilities, time delays are unavoidable, which may reduce system performance [30,31]. Based on LMIs theory, Ref. [32] solved the equality communication time delay problem for a group of UAVs. By developing the Lyapunov–Krasovskii (L–K) function, Ref. [33] addressed time-varying delay problem for a 2nd-order MAS. By applying generalized Halanay inequality, Ref. [34] investigated the formation tracking control of 2nd-order MAS with time-varying delays. However, the formation configuration cannot be adjusted dynamically in these works, limiting the application scope. In addition, wind disturbance has a significant impact on the movement of small UAVs in the real world, particularly when the modeling is inaccurate. To circumvent this issue, the mainstream techniques typically include neural networks estimators [35,36,37], nonlinear observers [38,39] and adaptive estimators [40,41], etc. On the basis of the aforementioned factors, we neutralize the effect of disturbances, uncertainties and time-varying communication delays and achieve precise control of time-varying formations.
In light of the aforementioned obstacles, we propose a novel QR formation FTC framework for a mobile sensing oriented application. The main contribution of this work is threefold. Firstly, based on a distributed adaptive FTC mechanism, the effect of time-varying multiplicative and additive faults can be effectively compensated for each QR, and the desired formation flight can still be achieved. Secondly, by applying the barrier Lyapunov function (BLF) technique and designing an auxiliary system, the attitude states of QRs can be constrained in the presence of input saturation, and our BLF analysis can also be applied to unconstrained scenarios without modifying the control structure. Compared to the methods in [27,28,29], the scope of application is expanded. Thirdly, the time-varying delay of each QR is different. Only delayed neighbor information is needed to realize formation flight; that is, the proposed protocol is distributed, and the time-varying formation configuration can be flexibly designed to adapt to target enclosing, area covering and other scenarios. Meanwhile, the disturbances and uncertainties are handled properly by radial basis function neural network (RBFNN) and an adaptive estimator; the application restrictions in real-word environments are relaxed compared to [32,33,34].
Let denote the Kronecker product of matrices and , and and indicate the minimum and maximum singular value of a matrix. We denote as the absolute value of a real number, the Euclidean norm of a vector and the Frobenius norm of a matrix.
2. Preliminaries and Problem Formulation
2.1. Basic Concepts on Graph Theory
An undirected graph represents the communication topology of the N QRs, which contains a set of nodes , a set of edges and a weighted adjacency matrix . If agent i is connected by an edge with agent j, that is , then . Otherwise , and for all . The set of neighbors of node is defined by . The out-degree of node is defined by . The degree matrix of graph is represented by , and the Laplacian matrix of graph is represented by . The undirected graph is said to be connected if a path exists between any two nodes , where the path represents a series of diverse adjacent points from to . If can access information from the leader, then the connection weight between them . Otherwise , and the matrix form is . Throughout this brief, the following assumption is made for the communication topology.
Assumption 1.
The undirected graph for N QRs is connected, and there exists at least one path between the leader and follower.
2.2. Problem Formulation and Modeling
Consider a group of N QRs following a virtual leader labeled as 0, of which the interaction topology is described by an undirected graph ; it is assumed that graph is connected. Taking practical factors into account, the dynamic model of QR can be formulated by using Newton’s laws [42]:
where , , and are position, velocity and attitude of the i-th QR in inertia frame, respectively. represents the angular velocity in a body-fixed frame. In addition, and represents the total mass and inertia matrix, respectively. represents the total thrust, and g represents the gravity constant, and represents the lumped uncertainty term including disturbance and inaccurate modeling in (1). , represents the aerodynamic damping coefficient. represent the control input torque. Unknown time-varying function and represent parameter perturbation and external disturbance in (2), respectively. , and are shown below:
where .
The model of input saturation is expressed as follows:
where , represents the control input free from limits but subject to actuator faults, which are expressed as follows
where and are time-varying additive and multiplicative actuator faults, respectively. is generated by the attitude controller to be designed.
Considering that most sensors and PTZ systems have constraint requirements for rotational motion, the attitude states of QRs will be constrained and are defined as follows
where represents the time-varying constraints.
The formation center is regarded as the virtual leader, which is specified by , and its trajectory is , which is piecewise 2nd-order differentiable. The time-varying formation pattern is set by a vector with the geometric center set as , where , are 2nd-order differentiable functions defining the motion mode of i-th QR with respect to the geometric center, . Based on consensus theory, we give the following definition:
Definition 1.
The formation tracking flight is said to be achieved when
where .
Except the communication delay between i-th QR and j-th QR, this paper also considers the self delay of i-th QR caused by calculation or measurement. and are generally regarded as uniform delay in the MAS consensus control problem [43].
Assumption 2.
The time-varying delay has upper bound, that is, , .
2.3. Control Objective
As depicted in Figure 1, the objective of this work is to design a formation control scheme for the QR mobile sensing platforms to perform the following tasks. The first one is a covering task, in which the QRs can follow the virtual leader to track a moving target and fully cover the target’s adjacent area to carry out sensing or surveillance. The second task is target enclosing, in which the QRs can be controlled to gather and rotate above the moving target to monitor or observe it. The detailed control objectives of proposed formation control protocol are as follows:
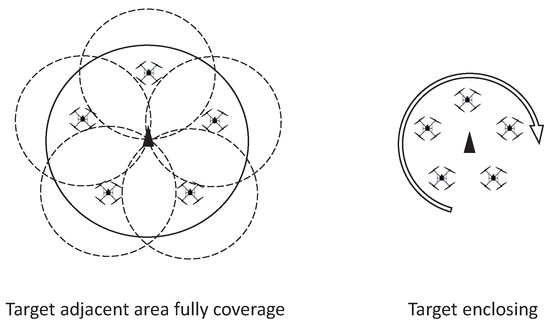
Figure 1.
Depiction of the target-enclosing and covering task.
- Consensus-based time-varying formation control protocol (10) is designed based on the demands of the target-enclosing and covering tasks;
- Distributed adaptive FTC mechanism is deployed to compensate the fault signals (4);
- BLF and auxiliary system are designed to ensure that the constraint requirements (5) of sensor payload will not be violated in the presence of input saturation (3);
- The influence of time-varying communication delay can be eliminated by the L–K technique;
- The problem of uncertainties and disturbances in (1) and (2) can be neutralized RBFNN (12) and adaptive estimators (49).
3. Main Results
The desired formation control scheme is proposed in Figure 2, which can be divided into a RBFNN-based time-delay position controller (NTDPC) (outer-loop) and an adaptive fault-tolerant attitude controller (AFTAC) (inner-loop). The inputs of outer-loop, including time-delayed neighbor information , time-delayed self information and time-delayed leader information are entered to NTDPC. In the mean time, the lumped uncertainties are compensated by the RBFNN approximation law. Then, the command attitude signals and total thrust are calculated from the outputs of NTDPC. The inputs of inner-loop, including command attitude signals , are transferred to AFTAC. Meanwhile, the external disturbances , actuator faults and model uncertainties are compensated by adaptive estimation laws. Finally, the control inputs and are applied to i-th QR for formation flight. It should be pointed out that the derivatives of are obtained from Command Filter_1 for the sake of reducing computational burden.
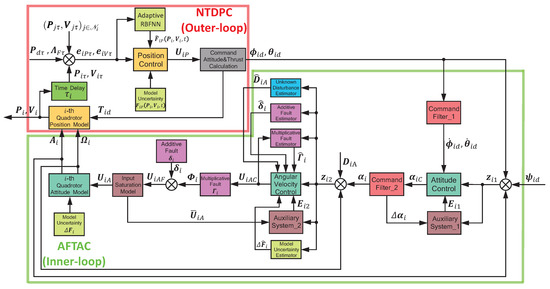
Figure 2.
Block diagram of proposed formation control scheme scheme.
3.1. RBFNN Approximation
Suppose an unknown smooth nonlinear function can be approximated over a prescribed compact set as follows
where denotes the radial basis function vector, of which the element is expressed as follows
where and are the center and spread. is the bounded RBFNN approximation error on , that is, with is an unknown constant. is the ideal RBFNN weight vector expressed as follows
where represents the estimation of .
3.2. Design of NTDPC
For i-th QR, the local tracking errors are defined as follows
where , .
Then the error dynamics of system (2) can be expressed in a compact form as follows
where , , , , , , .
Assumption 3.
The second derivatives of and are bounded; there exists positive constants and , such that and .
To obtain the approximation of the lumped uncertainty , we adopt an adaptive RBFNN with time-delayed states and as inputs and approximation value as output, which is expressed as
where is the current RBFNN weights estimation value of i-th QR, , , , .
Then can be expressed as
where , , with , the approximation of is
where .
In addition, the RBFNN weights estimation error is denoted as .
Remark 1.
In the light of Stone–Weierstrass approximation theorem [44], , and are bounded, namely, , and , , and are positive numbers.
Now we design the control inputs of i-th QR position subsystem (2) and update laws of RBFNN weights as:
where . , and . and are positive design constants, , , is positive definite with , .
Combining (14) and (15), we have
where , and .
Lemma 1.
Under Assumption 1, is positive definite [45], so and [44], in which and are formation tracking errors, with , .
Lemma 2.
According to [46], we can conclude that the following inequality is always valid:
where , and are arbitrary differentiable vector and scalar functions, respectively, and . is an arbitrary positive definite constant matrix.
Theorem 1.
Under Assumptions 1–3, with the control law (14) and update law (15), the time-varying formation tracking for N QRs position systems (2) subject to time-varying delays and uncertainties can be achieved if the positive design constants and , , , , are chosen appropriately to make the symmetric matrix be positive definite, which is
where .
Proof.
Consider the Lyapunov–Krasovskii candidate function as with
where .
Taking the time derivative of and we have
where , and .
By Lemma 2, we obtain the time derivatives of and as follows
and
where . By applying (23)–(25) we obtain
where , , and , are defined by (18). If is positive definite, then , and
Thus, is uniformly ultimately bounded (UUB) according to [47]. Moreover, , are bounded stable referring to the definition of , and following Lemma 1, the formation tracking errors and are also UUB. So, the desired position control for formation flight can be realized by control law (14) and RBFNN update law (15). □
Remark 2.
In matrix , , , , and are control and adaptive parameters, and , and are constants to be selected. is the upper bound of time delays. Except , all of the above parameters are adjustable to ensure the solvability of . Besides, one can see that all of the diagonal elements of are positive when being a certain value. Therefore, is solvable in Theorem 1.
3.3. Design of AFTAC
The command attitude and total thrust of i-th QR can be obtained from , which is derived as
where is a free variable and can be set to for simplicity.
Remark 3.
It is feasible to ensure is constantly positive to avoid singularity because is bounded by selecting suitable gain constant and is in a cetain range when calculating in (28).
To deploy the attitude control scheme, the following assumptions and lemma need to be made:
Assumption 4.
There exists a 2nd order differentiable continuous bound of command attitude within the constraint , namely, . The initial state of the attitude subsystem needs to be within the constraints , which is the -th order differentiable.
Assumption 5.
The actuators will not completely fail during operation, and the fault signals and change continuously within certain ranges, that is, , , where , are known constants with , and .
Assumption 6.
The model uncertainty factor and its derivatives and unknown disturbances are bounded, which are expressed as , , , can be unknown.
Lemma 3.
By [48], we know that the following inequality holds:
where are arbitrary numbers, .
The attitude tracking error of i-th QR is , of which the dynamic can be derived as
where is angular velocity tracking error, is the command filtered signal of designed virtual control law , in which the command filter limits the magnitude, rate and bandwidth of and is shown in Figure 3.
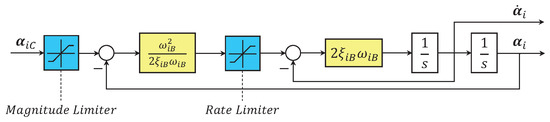
Figure 3.
Framework of the command filter, with and being design constants, .
In order to deal with the constraints on the attitude states, we adopt the -type BLF as follows
where . It is easy to see that when , then ; thus, holds if and only if is bounded, .
Remark 4.
When there is no attitude constraint on i-th QR, then ; thus, , and we have
that is, our BLF analysis method is also available for the unconstrained circumstance.
For simplicity of notation, define and take the derivative of with respect to time, and we have
The designed virtual control law is shown as below
where is a positive small constant, , is a design parameter, and with the small constant .
Remark 5.
To make be negative definite, the terms , , in (33) will be canceled by terms , , in (34), respectively. Noticing that
this will generate the negative definite BLF-form term in (33).
The auxiliary system is designed as
where , is a small constant, , are design constants, , .
Remark 6.
When saturation occurs, the auxiliary system will respond to it. Otherwise, , then ; thus, will converge into , after which, if saturation occurs again, can be reset so that . Then, the auxiliary system can be made responsive again.
As can be seen from (33),
Besides, . Set , then we have
The Lyapunov function for this step is constructed as
Taking the time derivative of (37) and notice that
then we have
where will be compensated later.
Similarly, the BLF for is
where , and
The dynamics of the angular velocity tracking error is derived as
where . According to (4), the following inequality holds:
where is the given input, is produced by our desired control law and and are known from Assumption 5; thus, can be determined. Define as
where is the estimation of the multiplicative fault , will be designed later. Notice that
where is the estimation error of multiplicative fault . Then, the desired control law is designed as
where , are small constants, is a design parameter and with , is the estimation value of disturbances’ upper bound .
The update law for , , and are constructed as
where , , , , , , , , , are design constants.
Similarly, auxiliary system is designed as
where , , are design parameters and is a small constant.
Set , similarly as (36), and we can obtain
where and are estimation errors of model uncertainty and additive fault, respectively. The Lyapunov candidate function for this step is derived as
where . Taking the time derivative of and observing that
then we have
where .
Now, denote , , where , . From (57), we have
Theorem 2.
Under the Assumptions 4–6, with the adaptive estimation laws (46)–(49) and control laws (43), (45), the attitude subsystem (3) of i-th QR subject to input saturation (3), actuator faults (4) and state constraints (5), possesses the following properties:
- i.
- The attitude state constraints (5) of i-th QR will not be exceeded during formation flight.
- ii.
- The attitude and angular velocity tracking error will exponentially converge into the set .
- iii.
- The estimation errors , , and the closed-loop signals will be bounded, .
Proof.
By (58), we have ; thus, has upper bound, which means the BLF is bounded. Besides,
then we get , . Due to and , we have and ; hence, during formation flight, no violation of attitude state constraints will occur. Additionally,
where , which indicates that will exponentially converge into , and the estimation errors and closed-signals mentioned above will also be bounded. □
4. Simulations
To demonstrate the effectiveness of the proposed scheme, some comparative simulations were carried out, which were programmed via Matlab 2016a and performed on a PC with a 4-core Intel i7-4980HQ@2.8 GHz CPU and 16 GB of RAM. The application scenario of using 5 QRs to enclose and cover a moving ground target is considered. Suppose a target is detected at and moving along . Meanwhile, the QRs will follow the virtual leader to fly right above the target and cover its adjacent area to monitor or sense. Then, the QR formation will converge towards its center at , start spinning at and lower the altitude at to enclose the target closely. The target’s adjacent area is defined as a circular area with the radius being 3.5 m and centered on the target. The coverage area of i-th QR is centered on , with the radius being , and represents the angle of view of the sensor payload. The trajectory of the virtual leader is set as , with . The formation function is designed as , where , with , and . The topology graph is shown in Figure 4, which is undirected and connected, with the weights being , , , and .
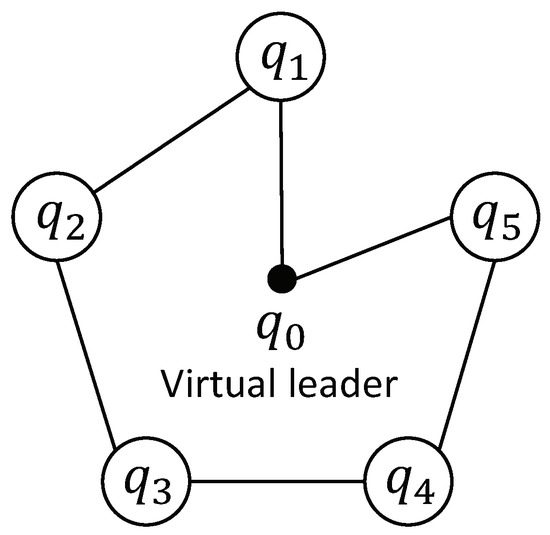
Figure 4.
The communication topology graph.
Remark 7.
In practical applications, the motion information of some non-cooperative targets may not be directly obtained. In this case, the estimated motion information can be obtained by other means and used for formation control, but it is not within the scope of this study. More details can be seen in [49,50]. can be designed carefully according to different sensing tasks, sensor performances and quality-of-service policies. The chosen in this paper is a basic example to demonstrate the effectiveness of the proposed method.
With reference to a physical product, the parameters of the QRs are set as (kg), and . The time-varying delays are set as (s), (s) and (s). The initial conditions are (m), (m), (m), (m), (m), (rad), and (m/s), (rad/s). The constraints on attitude state is (rad) and the angular velocity state is constrained by (rad/s). The control input saturation of attitude controller is set as (Nm), (Nm). The position controller parameters are , , , , , (). The attitude controller parameters are , . The adaptive laws parameters are , , , , , . The design constant of command filter are , . The parameters for RBFNN are and the initial weights are set randomly, where . The lumped uncertainty terms of position subsystem are given as
Besides, the external disturbances of the attitude subsystem containing stable, periodic and aperiodic components are set as follows
The time-varying multiplicative and additive actuator fault signals are considered as follows
with , , as the initial estimation values.
The simulation results of trajectory, position, attitude, attitude constraints, angular velocity constraints, control inputs, RBFNN, disturbance estimation, multiplicative fault estimation and additive fault estimation are demonstrated in Figure 5, Figure 6, Figure 7, Figure 8, Figure 9, Figure 10, Figure 11, Figure 12, Figure 13 and Figure 14, respectively. The trajectory and position snapshots of QRs and a moving target are illustrated in Figure 5. It can be seen that the QRs can successfully form the desired formation pattern and track the desired trajectory , thereby achieving the full coverage and close-range enclosing. Figure 6 shows the position tracking errors with and without RBFNN. In the case of with RBFNN, the tracking errors converge to the neighborhood of zero rapidly under the influence of lumped uncertainties. The effectiveness of RBFNN is demonstrated by the fact that tracking error cannot be reduced to near zero and continues to oscillate in the absence of RBFNN. Figure 7 demonstrates the robust learning ability of RBFNNs, convergence of approximation errors takes only a few seconds and oscillation at the beginning is caused by randomly selected initial weights. Figure 8 depicts the tracking performance of AFTAC, which, despite initial misalignments, tracks the command signal exceptionally well. Furthermore, Figure 9 and Figure 10 show the norm of attitude and norm of angular velocity always satisfy the predefined constraints and during the whole process. In Figure 9, the unconstrained AFTAC in [51] is compared under identical conditions, and the parameters of the comparison AFTAC are adjusted to achieve relatively good tracking performance. One can observe that the comparison AFTAC tracks the command signal closely throughout the whole process, but it cannot guarantee the state constraints will always be met; the constraints are occasionally exceeded, particularly when the command signal changes rapidly. The comparison results demonstrate that the specific system states can be constrained within a certain range to meet safety or sensor payload requirements, which is an advantage of our method. Figure 11 depicts the input signals of QRs, which contain large spikes at the beginning, and . These spikes are effectively filtered out by input saturation, where the actuator’s limitations are fully reflected. As demonstrated by the proof of Theorem 2, the upper bound of external disturbance and actuator fault signals are effectively estimated in Figure 12, Figure 13 and Figure 14.
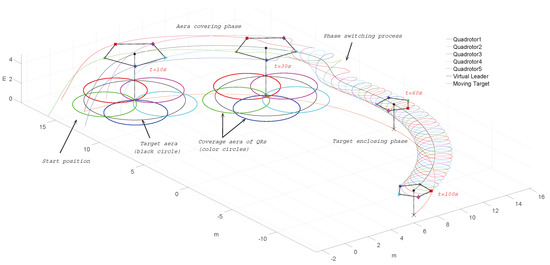
Figure 5.
Trajectory, position snapshots and coverage areas of Quadrotors (QRs) and a moving target with , .
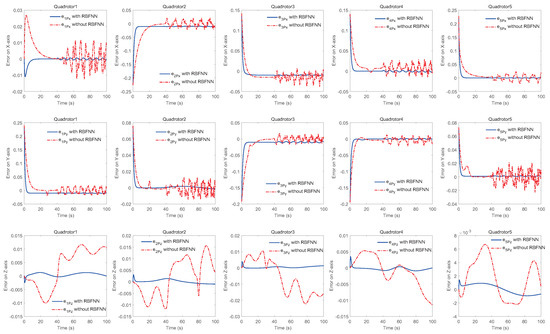
Figure 6.
Comparison of position tracking errors with and without radial basis function neural network (RBFNN).
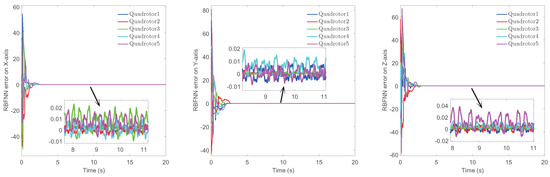
Figure 7.
RBFNN approximation errors on 3 axes.
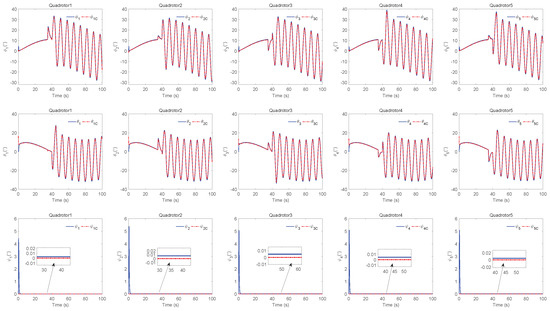
Figure 8.
Attitude signals of QRs.
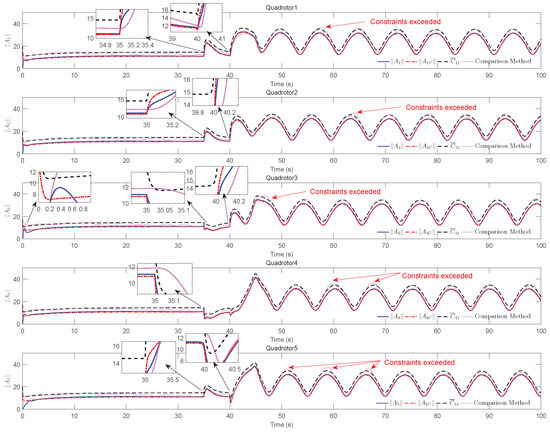
Figure 9.
, and constraints , .
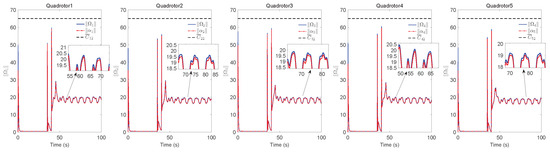
Figure 10.
, and constraints , .
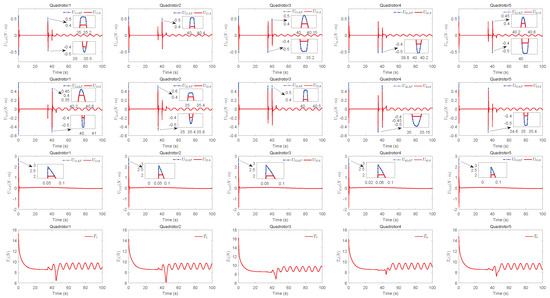
Figure 11.
Input signals of QRs.
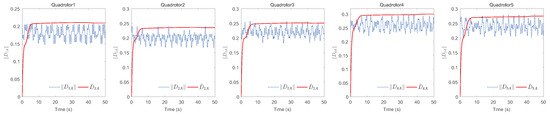
Figure 12.
Estimation of external disturbances’ upper bounds.
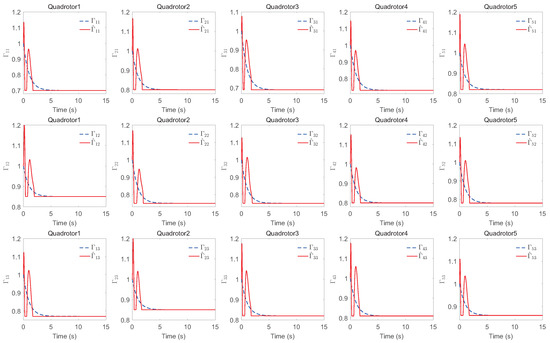
Figure 13.
Estimation of multiplicative faults.
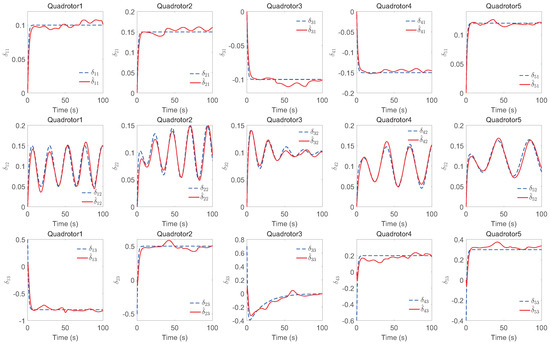
Figure 14.
Estimation of additive faults.
5. Conclusions
This article presents a distributed formation control scheme for a group of QRs subject to constraints and time-varying delays. The proposed scheme consists of NTDPC for position control and state-constrained AFTAC for attitude regulating. In NTDPC, an adaptive RBFNN is utilized to compensate the lumped uncertainties, and a Lyapunov–Krasovskii analysis is applied to handle the time-varying delay. Based on the backstepping technique, AFTAC employs a tan-type BLF to handle the state constraints, an auxiliary system combined with a command filter to deal with input saturation and adaptive estimators to compensate fault signals and disturbances. To determine the efficacy of the proposed method, comparative simulations were conducted. We demonstrate that the proposed method can be applied for a mobile sensing task; the formation tracking errors are UUB; the estimation errors of actuator faults, uncertainties, and disturbances are also bounded; and the predefined constraints will never be violated during formation flight. However, the current method has some limitations, such as symmetric state constraints and a fixed network topology. Additional research will yield asymmetric state constraints and a mechanism for switching topologies.
Author Contributions
Conceptualization, Z.Z. and X.Z.; methodology, Z.Z.; software, Z.Z.; validation, Z.Z. and X.Z.; formal analysis, Z.Z.; investigation, Z.Z.; resources, Z.Z.; data curation, X.Z.; writing—original draft preparation, Z.Z.; writing—review and editing, Z.Z.; visualization, X.Z.; supervision, M.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Fundamental Research Funds for the Central Universities (Grant No. YWF-22-JC-01,02,03).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Wang, J.; Zhou, Z.; Wang, C.; Shan, J. Multiple Quadrotors Formation Flying Control Design and Experimental Verification. Unmanned Syst. 2019, 7, 47–54. [Google Scholar] [CrossRef]
- Du, H.; Zhu, W.; Wen, G.; Duan, Z.; Lü, J. Distributed Formation Control of Multiple Quadrotor Aircraft Based on Nonsmooth Consensus Algorithms. IEEE Trans. Cybern. 2019, 49, 342–353. [Google Scholar] [CrossRef]
- Dong, X.; Hua, Y.; Zhou, Y.; Ren, Z.; Zhong, Y. Theory and Experiment on Formation-Containment Control of Multiple Multirotor Unmanned Aerial Vehicle Systems. IEEE Trans. Autom. Sci. Eng. 2019, 16, 229–240. [Google Scholar] [CrossRef]
- Zhao, Z.; Wang, J.; Chen, Y.; Ju, S. Iterative learning-based formation control for multiple quadrotor unmanned aerial vehicles. Int. J. Adv. Robot. Syst. 2020, 17. [Google Scholar] [CrossRef]
- Aranda, M.; Mezouar, Y.; Lopez, N.; Sagues, C. Enclosing a moving target with an optimally rotated and scaled multiagent pattern. Sensors 2021, 94, 601–611. [Google Scholar] [CrossRef]
- Zhang, D.; Duan, H.; Zeng, Z. Leader-Follower Interactive Potential for Target Enclosing of Perception-Limited UAV Groups. IEEE Syst. J. 2022, 16, 856–867. [Google Scholar] [CrossRef]
- Yu, X.; Ma, J.; Ding, N.; Zhang, A. Cooperative Target Enclosing Control of Multiple Mobile Robots Subject to Input Disturbances. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 3440–3449. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.; Li, X. Reactive Autonomous Navigation of UAVs for Dynamic Sensing Coverage of Mobile Ground Targets. Sensors 2020, 20, 3720. [Google Scholar] [CrossRef] [PubMed]
- Sun, Q.; Liu, Z.; Chi, M.; Dou, Y.; He, D.; Qin, Y. Coverage control of unicycle multi-agent network in dynamic environment. Math. Methods Appl. Sci. 2021, 7795. [Google Scholar] [CrossRef]
- Song, C.; Fan, Y.; Xu, S. Finite-Time Coverage Control for Multiagent Systems With Unidirectional Motion on a Closed Curve. IEEE Trans. Cybern. 2021, 51, 3071–3078. [Google Scholar] [CrossRef]
- Yu, D.; Xu, H.; Chen, C.; Bai, W.; Wang, Z. Dynamic Coverage Control Based on K-Means. IEEE Trans. Ind. Electron. 2022, 69, 5333–5341. [Google Scholar] [CrossRef]
- Liu, C.; Ma, X.; Guo, X.; Tang, J. Distributed Energy-Efficient Multi-UAV Navigation for Long-Term Communication Coverage by Deep Reinforcement Learning. IEEE Trans. Mob. Comput. 2020, 19, 1274–1285. [Google Scholar] [CrossRef]
- Ghasemi, A.; Askari, J.; Menhaj, M.B. Distributed Fault Tolerant Control for Multi-agent Systems with Complex-weighted Directed Communication Topology subject to Actuator Faults. Int. J. Control Autom. Syst. 2019, 17, 415–424. [Google Scholar] [CrossRef]
- Cheng, W.; Zhang, K.; Jiang, B.; Ding, S.X. Fixed-Time Fault-Tolerant Formation Control for Heterogeneous Multi- Agent Systems with Parameter Uncertainties and Disturbance. IEEE Trans. Circuits Syst. 2021, 68, 2121–2133. [Google Scholar] [CrossRef]
- Abbaspour, A.; Mokhtari, S.; Sargolzaei, A.; Yen, K.K. A Survey on Active Fault-Tolerant Control Systems. Electronics 2020, 9, 1513. [Google Scholar] [CrossRef]
- Gui, Y.; Jia, Q.; Li, H.; Cheng, Y. Reconfigurable Fault-Tolerant Control for Spacecraft Formation Flying Based on Iterative Learning Algorithms. Appl. Sci. 2022, 12, 2485. [Google Scholar] [CrossRef]
- Zhao, W.; Liu, H.; Wan, Y. Data-driven fault-tolerant formation control for nonlinear quadrotors under multiple simultaneous actuator fault. Syst. Control. Lett. 2021, 158, 105063. [Google Scholar] [CrossRef]
- Zheng, Z.; Qian, M.; Li, P.; Yi, H. Distributed Adaptive Control for UAV Formation With Input Saturation and Actuator Fault. IEEE Access 2019, 7, 144638–144647. [Google Scholar] [CrossRef]
- Yu, X.; Liu, Z.; Zhang, Y. Fault-tolerant formation control of multiple UAVs in the presence of actuator faults. Int. J. Robust Nonlinear Control 2016, 26, 2668–2685. [Google Scholar] [CrossRef]
- Liu, C.; Jiang, B.; Zhang, K. Adaptive Fault-Tolerant H-Infinity Output Feedback Control for Lead–Wing Close Formation Flight. IEEE Trans. Syst. Man Cybern. 2020, 50, 2804–2814. [Google Scholar] [CrossRef]
- Zou, Y.; Xia, K.; He, W. Adaptive Fault-Tolerant Distributed Formation Control of Clustered Vertical Takeoff and Landing UAVs. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 1069–1082. [Google Scholar] [CrossRef]
- Gong, J.; Ma, Y.; Jiang, B.; Mao, Z. Distributed adaptive fault-tolerant formation control for heterogeneous multiagent systems under switching directed topologies. J. Frankl. Inst. 2022, 359, 3366–3388. [Google Scholar] [CrossRef]
- Liu, F.; Hua, Y.; Dong, X.; Li, Q.; Ren, Z. Adaptive fault-tolerant time-varying formation tracking for multi-agent systems under actuator failure and input saturation. ISA Trans. 2020, 104, 145–153. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Dong, X.; Shi, P.L.; Ren, Z.; Liu, J. Distributed Fault-Tolerant Formation Tracking Control for Multiagent Systems With Multiple Leaders and Constrained Actuators. IEEE Trans. Cybern. 2022. [Google Scholar] [CrossRef] [PubMed]
- Liu, B.; Li, A.; Guo, Y.; Wang, C. Adaptive distributed finite-time formation control for multi-UAVs under input saturation without collisions. Aerosp. Sci. Technol. 2022, 120, 107252. [Google Scholar] [CrossRef]
- Huang, S.; Teo, R.; Leong, W. Multi-Camera Networks for Coverage Control of Drones. Drones 2022, 6, 67. [Google Scholar] [CrossRef]
- Yang, J.; Cao, G.; Chen, W.; Zhang, W. Finite-Time Formation Control of Second-Order Linear Multi-Agent Systems with Relative State Constraints: A Barrier Function Sliding Mode Control Approach. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 1253–1256. [Google Scholar] [CrossRef]
- López-Nicolás, G.; Aranda, M.; Mezouar, Y. Adaptive Multirobot Formation Planning to Enclose and Track a Target With Motion and Visibility Constraint. IEEE Trans. Robot. 2020, 36, 142–156. [Google Scholar]
- Miao, Z.; Zhong, H.; Lin, J.; Wang, Y.; Chen, Y.; Fierro, R. Vision-Based Formation Control of Mobile Robots With FOV Constraints and Unknown Feature Depth. IEEE Trans. Control Syst. Technol. 2021, 29, 2231–2238. [Google Scholar] [CrossRef]
- Liu, H.; Ma, T.; Lewis, F.L.; Wan, Y. Robust Formation Trajectory Tracking Control for Multiple Quadrotors With Communication Delays. IEEE Trans. Control Syst. Technol. 2020, 28, 2633–2640. [Google Scholar] [CrossRef]
- Ren, H.; Karimi, H.R.; Lu, R.; Wu, Y. Synchronization of Network Systems via Aperiodic Sampled-Data Control With Constant Delay and Application to Unmanned Ground Vehicles. IEEE Trans. Ind. Electron. 2020, 67, 4980–4990. [Google Scholar] [CrossRef]
- Ma, P.; Ji, J.; Sui, J.; Lei, M. Research on Cooperative Formation Flight Control of Multi-UAV with Communication Time Delay. In Proceedings of the International Conference on Control Science and Electric Power Systems (CSEPS), Shanghai, China, 28–30 May 2021; pp. 54–58. [Google Scholar]
- Wang, M.; Zhang, T. Leader-following Formation Control of Second-order Nonlinear Systems with Time-varying Communication Delay. Int. J. Control Autom. Syst. 2021, 19, 1729–1739. [Google Scholar] [CrossRef]
- Liu, X.; Deng, F.; Wei, W.; Wan, F. Formation Tracking Control of Networked Systems With Time-Varying Delays and Sampling Under Fixed and Markovian Switching Topology. IEEE Trans. Control Netw. Syst. 2022, 9, 601–612. [Google Scholar] [CrossRef]
- Ren, H.P.; Jiao, S.S.; Wang, X.; Kaynak, O. Fractional Order Integral Sliding Mode Controller Based on Neural Network: Theory and Electro-Hydraulic Benchmark Test. IEEE-ASME Trans. Mechatronics 2022, 27, 1457–1466. [Google Scholar] [CrossRef]
- Singh, P.; Giri, D.K.; Ghosh, A.K. Robust backstepping sliding mode aircraft attitude and altitude control based on adaptive neural network using symmetric BLF. Aerosp. Sci. Technol. 2022, 126, 107653. [Google Scholar] [CrossRef]
- Ge, Y.; Zhou, J.; Deng, W.; Yao, J.; Xie, L. Neural network robust control of a 3-DOF hydraulic manipulator with asymptotic tracking. Asian J. Control 2022. [Google Scholar] [CrossRef]
- Nuss, U. Design of a disturbance observer based on an already existing observer without disturbance model. At-Automatisierungstechnik 2022, 70, 134–141. [Google Scholar]
- Huang, Z.G.; Chen, M. Coordinated Disturbance Observer-Based Flight Control of Fixed-Wing UAV. IEEE Trans. Circuits Syst.-Express Briefs 2022, 69, 3545–3549. [Google Scholar] [CrossRef]
- Xie, W.; Cabecinhas, D.; Cunha, R.; Silvestre, C. Adaptive Backstepping Control of a Quadcopter With Uncertain Vehicle Mass, Moment of Inertia, and Disturbances. IEEE Trans. Ind. Electron. 2022, 69, 549–559. [Google Scholar] [CrossRef]
- Wang, N.; Hao, F. Event-based adaptive sliding mode control for Euler-Lagrange systems with parameter uncertainties and external disturbances. Int. J. Robust Nonlinear Control 2022, 32, 5420–5435. [Google Scholar] [CrossRef]
- Matouk, D.; Gherouat, O.; Abdessemed, F.; Hassam, A. Quadrotor position and attitude control via backstepping approach. In Proceedings of the International Conference on Modelling, Identification and Control (ICMIC), Algiers, Algeria, 15–17 November 2016; pp. 73–79. [Google Scholar]
- Liu, K.; Xie, G.; Wang, L. Consensus for multi-agent systems under double integrator dynamics with time-varying communication delays. Int. J. Robust Nonlinear Control 2012, 22, 1881–1898. [Google Scholar] [CrossRef]
- Zhang, H.; Lewis, F.L. Adaptive cooperative tracking control of higher-order nonlinear systems with unknown dynamics. Automatica 2012, 46, 1432–1439. [Google Scholar] [CrossRef]
- Ni, W.; Cheng, D. Leader-following consensus of multi-agent systems under fixed and switching topologies. Syst. Control Lett. 2010, 59, 209–217. [Google Scholar] [CrossRef]
- Zhu, Z.; Guo, Y.; Zhong, C. Distributed attitude coordination tracking control for spacecraft formation with time-varying delays. Trans. Inst. Meas. Control 2018, 40, 2082–2087. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2001; pp. 168–174. [Google Scholar]
- Li, P.; Yang, G.H. Fault-tolerant control of uncertain nonlinear systems with nonlinearly parameterized fuzzy system. In Proceedings of the IEEE Control Applications, (CCA) & Intelligent Control, (ISIC), St. Petersburg, Russia, 8–10 October 2009; pp. 382–387. [Google Scholar]
- Zhou, B.; Cai, G.; Liu, Y.; Liu, P. Motion prediction of a non-cooperative space target. Adv. Space Res. 2018, 61, 207–222. [Google Scholar] [CrossRef]
- Zhu, Z.; Xiang, W.; Huo, J.; Yang, M.; Zhang, G. Non-cooperative target pose estimation based on improved iterative closest point algorithm. J. Syst. Eng. Electron. 2022, 33, 1–10. [Google Scholar] [CrossRef]
- Yu, W.; Yan, J.; Pan, X.; Tan, S.; Cao, H.; Song, Y. Fault-tolerant attitude tracking control with practical finite time convergence for unmanned aerial vehicles under actuation faults. Int. J. Robust Nonlinear Control 2022, 32, 3737–3753. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).