1. Introduction
Signals contain rich feature information, so it is particularly important to extract key information through signal processing techniques [
1]. In the early stage of bearing failure, the local surface damage will excite the transient impact of vibration signal. Therefore, finding damage-related transient shocks from complex vibration signals is the key to fault diagnosis [
2]. However, the early fault diagnosis of bearings faces three great challenges: (1) the interaction between mechanical components and the environment causes the coupling between non-stationary vibration signals and noise signals [
2]; (2) repeated transients induced by faults are hidden in noise and interference components [
3]; and (3) compared with the natural frequency of bearing, the characteristics of slight damage fault are not obvious.
At present, two types of methods are commonly used to solve the above problems, including spectral analysis and envelope demodulation [
4]. Spectral analysis locates the resonant frequency bands by establishing the spectral frequency and cyclic frequency planes, but most spectral analysis methods are time-consuming and memory-intensive. Envelope demodulation preserves the effective resonant frequency band by bandpass filtering and performs envelope analysis. However, finding the most suitable demodulation frequency band is the main challenge of this method [
5]. At present, researchers determine the most appropriate demodulation frequency band through the following three methods: (1) detect the impulse sequence in the signal through bandpass filter and kurtosis. Popular methods include spectral kurtosis (SK), infographic, etc. [
6]; (2) the demodulation frequency band is determined by detecting the periodic shocks of the signal, and the classical methods include minimum entropy deconvolution (MED), maximum correlation kurtosis deconvolution (MCKD), and so on [
7]; and (3) signal decomposition is another effective method. Common decomposition methods include wavelet packet decomposition (WPD), local mean decomposition (LMD), empirical mode decomposition (EMD), etc. In addition, intrinsic time scale decomposition (ITD), variational modal decomposition (VMD) and empirical wavelet transform (EWT) are novel methods. However, these methods have some inherent defects. WPD will produce frequency aliasing and false frequencies [
8]. EMD and LMD methods have the problems of modal aliasing and endpoint effect [
9]. ITD adopts a linear transformation strategy, which leads to waveform blur and distortion [
10]. The mode number and penalty parameters of VMD need to be set in advance, when the parameters are not suitable, over-decomposition or under-decomposition will occur [
11]. The Fourier segmentation required by EWT strongly depends on the local maxima of the Fourier spectral amplitude, which means that the reliability of the Fourier segmentation is low [
12].
Heng Li proposed time-varying filtering empirical mode decomposition (TVF-EMD) [
13]. Compared with the above methods, this method has the following advantages [
14]: (1) a time-varying filter is used in the transformation process of TVF-EMD, which can improve the mode aliasing while maintaining the time-varying characteristics of the algorithm; (2) the improved stopping criterion gives TVF-EMD robust performance at low sampling rate.; and (3) this method is insensitive to noise. However, we need to pre-set two key parameters of TVF-EMD. The bandwidth threshold affects the performance of modal separation, and the order of B-spline affects the filtering performance of the algorithm. When the parameters are selected appropriately, TVF-EMD also has two other advantages: (1) the screening process is completed by the optimal time-varying filter (B-spline approximate filter), which effectively solves the problem of mode aliasing in the decomposition process; and (2) the separation and intermittency problems in the decomposition process are completely solved. It can be seen that the parameter selection of TVF-EMD is particularly important. Inspired by the application of natural heuristic method in signal processing, this paper considers using a bionic algorithm to adaptively determine the parameters of TVF-EMD.
The application of optimization algorithm in signal processing is gradually increasing, which not only avoids the influence of human experience, but also improves the signal processing performance of the corresponding methods. The performance of signal decomposition largely depends on the segmentation effect of the intrinsic mode function (IMF). Those sub signals with the same zero crossing points and extreme points are called standard IMF, and several IMFs can form any signal. Wang et al. [
15] proposed an improved VMD based on the Archimedes optimization algorithm (AOA) and used the AOA algorithm to find IMFs that were sensitive to fault features. Jin et al. [
16] proposed an improved gray wolf optimization (GWO) algorithm based on hybrid strategy, and the improved GWO algorithm was used to optimize VMD parameters for signal decomposition. However, this method relies on manually extracted features. Meng et al. [
17] proposed a fault diagnosis method based on the autoregressive moving average (ARMA) model and the multi-point optimal minimum entropy deconvolution adjustment (MOMEDA) algorithm, and the MOMEDA parameters were optimized by using the sparrow search algorithm (SSA). Ji et al. [
18] proposed an OWT structural performance degradation evaluation method based on an optimized variational modal decomposition (VMD) algorithm, which can extract structural performance degradation characteristics from noise reduction data. Lu et al. [
19] proposed an improved VMD adaptive signal denoising method, which used the optimized VMD to decompose the pipeline leakage signal and obtain multiple eigenmode functions. MGA et al. [
20] proposed a framework based on the sailfish optimization algorithm (SFO) and Gini index (GI), which adaptively selects the optimal VMD parameters for each fault signal. However, the VMD method consumes more time than other competitive algorithms. Zhang et al. [
21] proposed a parameter-adaptive VMD method based on the grasshopper optimization algorithm (GOA) to analyze the vibration signals of rotating machinery. Mehdi et al. [
22] used the grasshopper optimization algorithm (GOA) to determine the clustering center, and used transformer operation data to evaluate and compare the performance under different conditions. Hu et al. [
23] used nonlinear strategy to improve the attenuation coefficient of GOA, and introduced golden sine operator to update the individual position of GOA. However, the calculation time of this method model is long. Yahya et al. [
24] proposed an improved grasshopper optimization algorithm (GOA) to improve the exploration and development ability of GOA by adjusting the new function of GOA main control parameters, but this method is too complex and inflexible. Ahmed A et al. [
25] proposed an improved grasshopper optimization algorithm (GOA) based on opposed learning (OBL) strategy, called OBLGOA, to solve benchmark optimization functions and engineering problems, but this method is more time-consuming than GOA. Therefore, we proposed a simple and effective improvement strategy in this paper, which dynamically adjusts the decline coefficient of GOA through the nonlinear decline strategy.
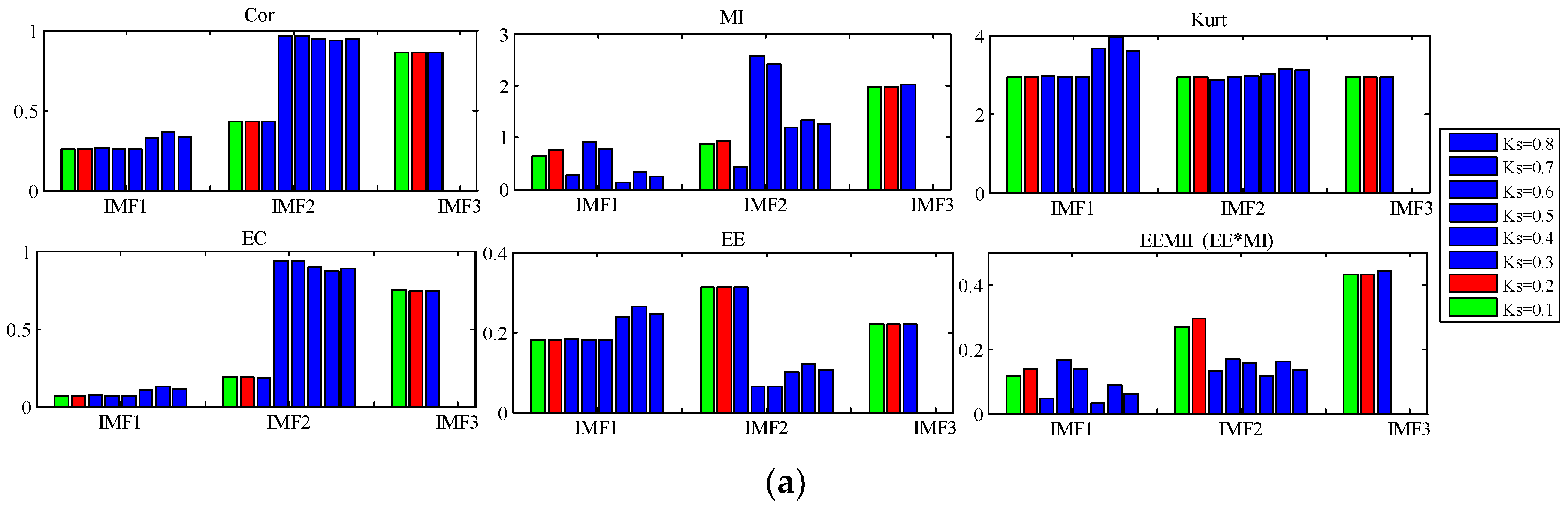
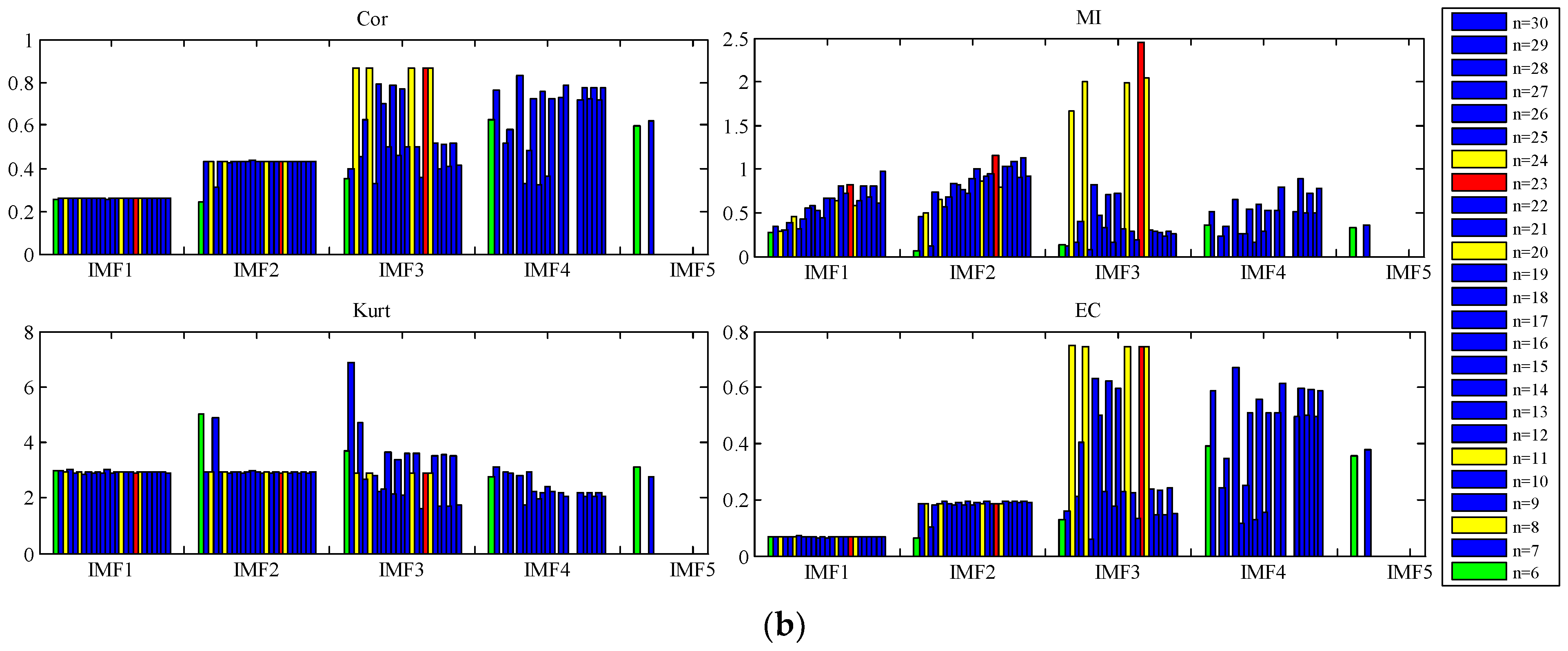
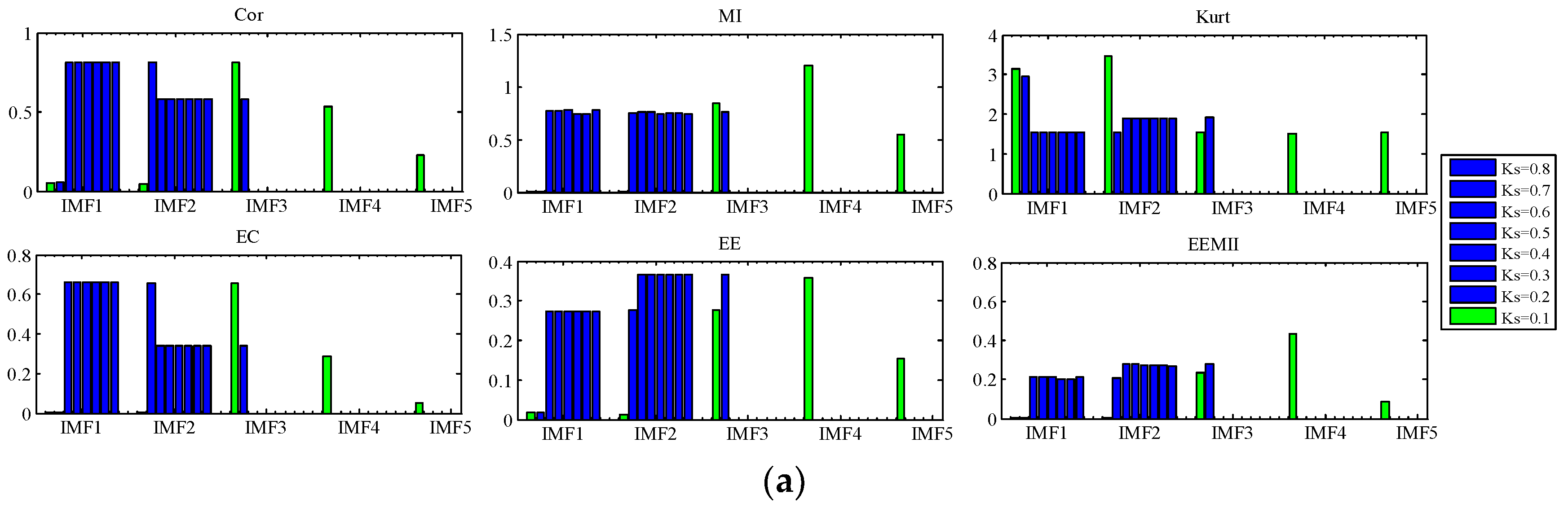
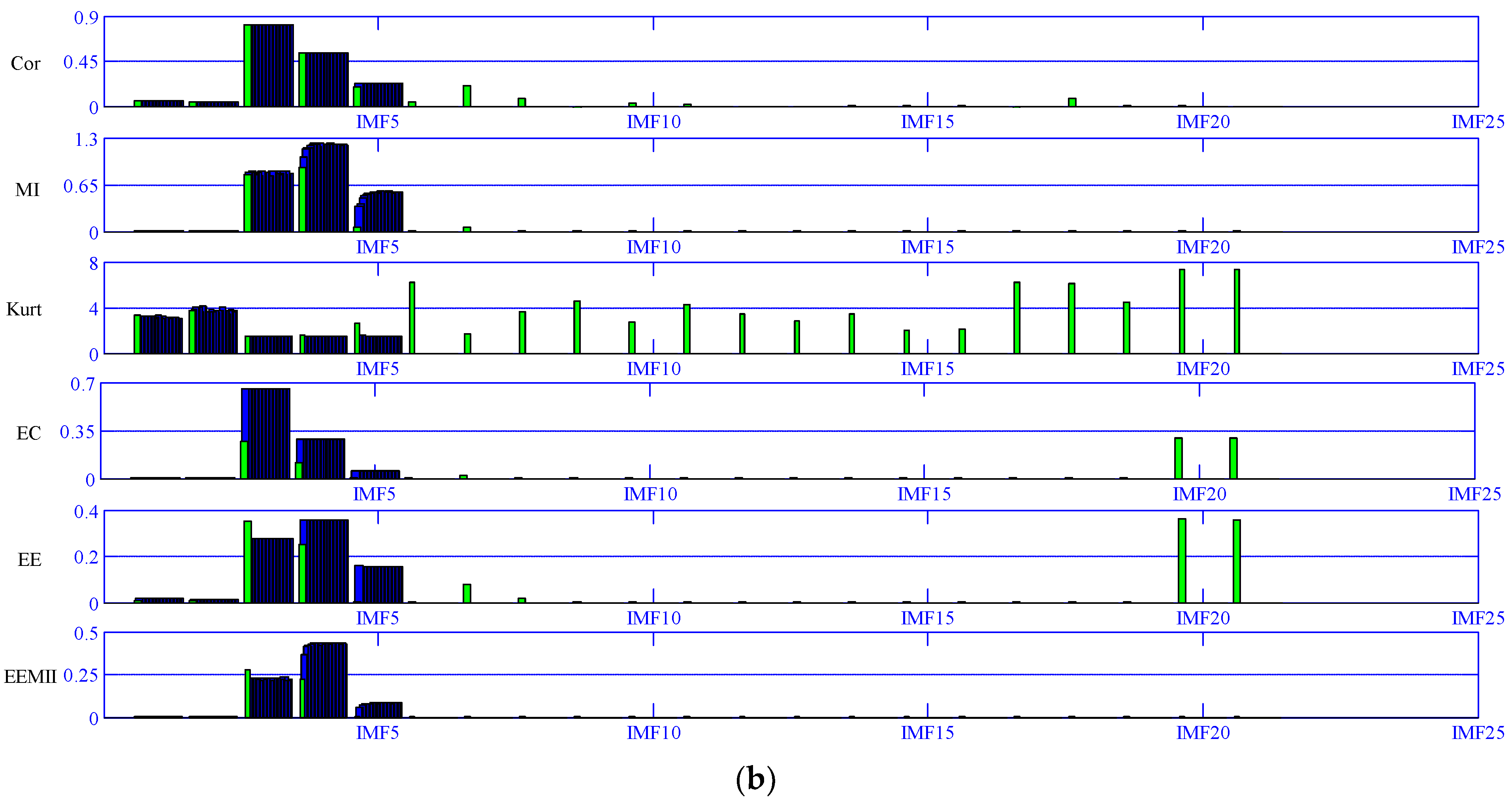
In the above optimization problems, the selection of the objective function directly determines the optimal solution of the problem. Cor [
26], mutual information (MI) [
27], Kurt, energy coefficient (EC) [
28], and energy entropy (
EE) [
29] are commonly used evaluation indexes in signal processing. Other indexes include entropy, sparsity metrics, smooth metrics, etc. [
30]. MI can characterize the interdependence and matching degree between two signals. If only MI is used as the objective function, the information related to the original signal will be preserved, and the information related to the fault may be lost.
EE can characterize the energy distribution of the signal in the frequency-domain, and the energy distribution of the frequency is closely related to the operating state. If only
EE is used as the objective function, the information related to the original signal may be lost. Considering the shortcomings of both, the energy entropy mutual information (
EEMI) composed of
EE and
MI is used as the objective function.
To sum up, we proposed a parameter-adaptive TVF-EMD feature extraction method based on IGOA in this paper. First, the GOA decrement coefficient is adjusted through a nonlinear decrement strategy, which can not only balance exploration and development, but also enhance global and local search capabilities. Then, EEMI is introduced to consider the energy distribution of the modal and the dependence between the modes and the original signal, and take it as the objective function. Then, TVF-EMD is optimized by IGOA and the optimal parameters matching the input signal are obtained. Finally, sensitive modes with large kurtosis are analyzed to extract the characteristic frequency of the signal. The effectiveness of the proposed method is demonstrated by analyzing the simulation signals and the bearing test bench signals.
The arrangement of this paper is as follows: The
Section 2 briefly introduces the theory of TVF-EMD and GOA; in the
Section 3, the proposed method is introduced in detail; in the
Section 4, the effectiveness of the proposed method is verified by 23 benchmark functions, simulation signals and bearing signals; the
Section 5 draws a conclusion.
3. Proposed Method
3.1. Improved Grasshopper Optimization Algorithm
In Equation (8), the decreasing coefficient
appears twice. As the number of iterations increases, the inner
reduces the attraction or repulsion between grasshoppers. It is used to explore a larger search space. Outer
balances the exploration and development of groups near the target [
35]. It is used to reduce the movement of grasshoppers near the target.
In GOA, decreases linearly, which means that the interaction force between grasshoppers decreases linearly, and the moving speed of grasshoppers near the target also decreases linearly. Therefore, there are two flaws in this strategy: (1) the inner decreasing speed is too fast, which will cause the force between the grasshoppers to be very small, so the large-scale parameter space will be missed; and (2) if the outer decreases too slowly, the grasshopper near the target will move too fast, so the global optimal solution will be lost.
In order to solve the above problems, the nonlinear decline strategy is used to improve the decline coefficient
. Replace inner
with
and outer
with
. The improved location update formula is shown below.
where
and
are natural numbers, and other parameters are the same as those of Formula (9). Since
,
,
is approximately equal to
, indicating that the same value of
and
has little effect on
. Therefore, in IGOA, the value of the
strategy is
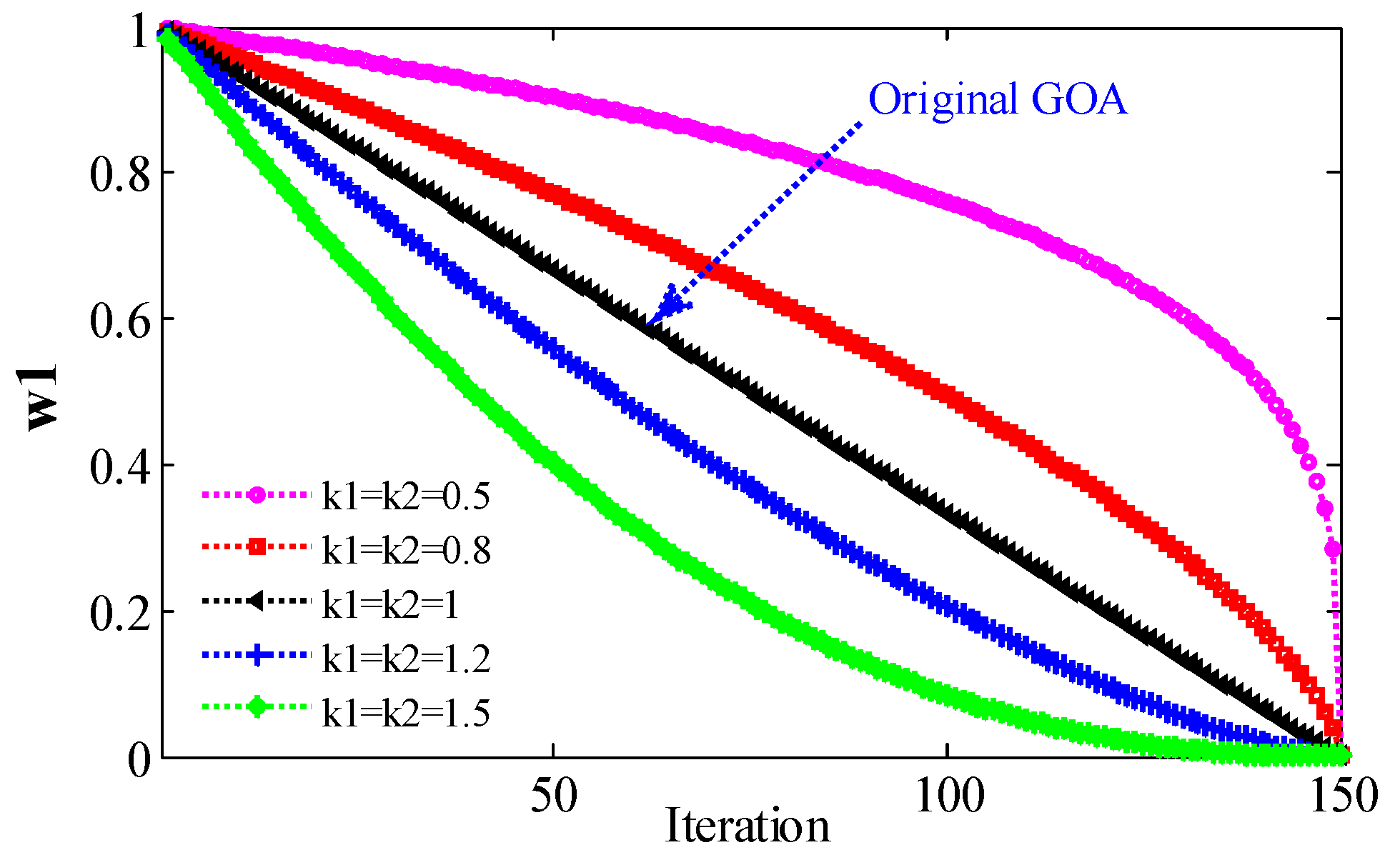
. At the same time, in order to compare the influence of different parameters on the results,
and
are set to 0.5, 0.8, 1, 1.2, and 1.5, respectively, in the following experiments. When the maximum number of iterations (Maxiter)
, the change trend of
is shown in
Figure 1. When
, Equation (10) is equivalent to (9), i.e.,
is the original linear decreasing strategy
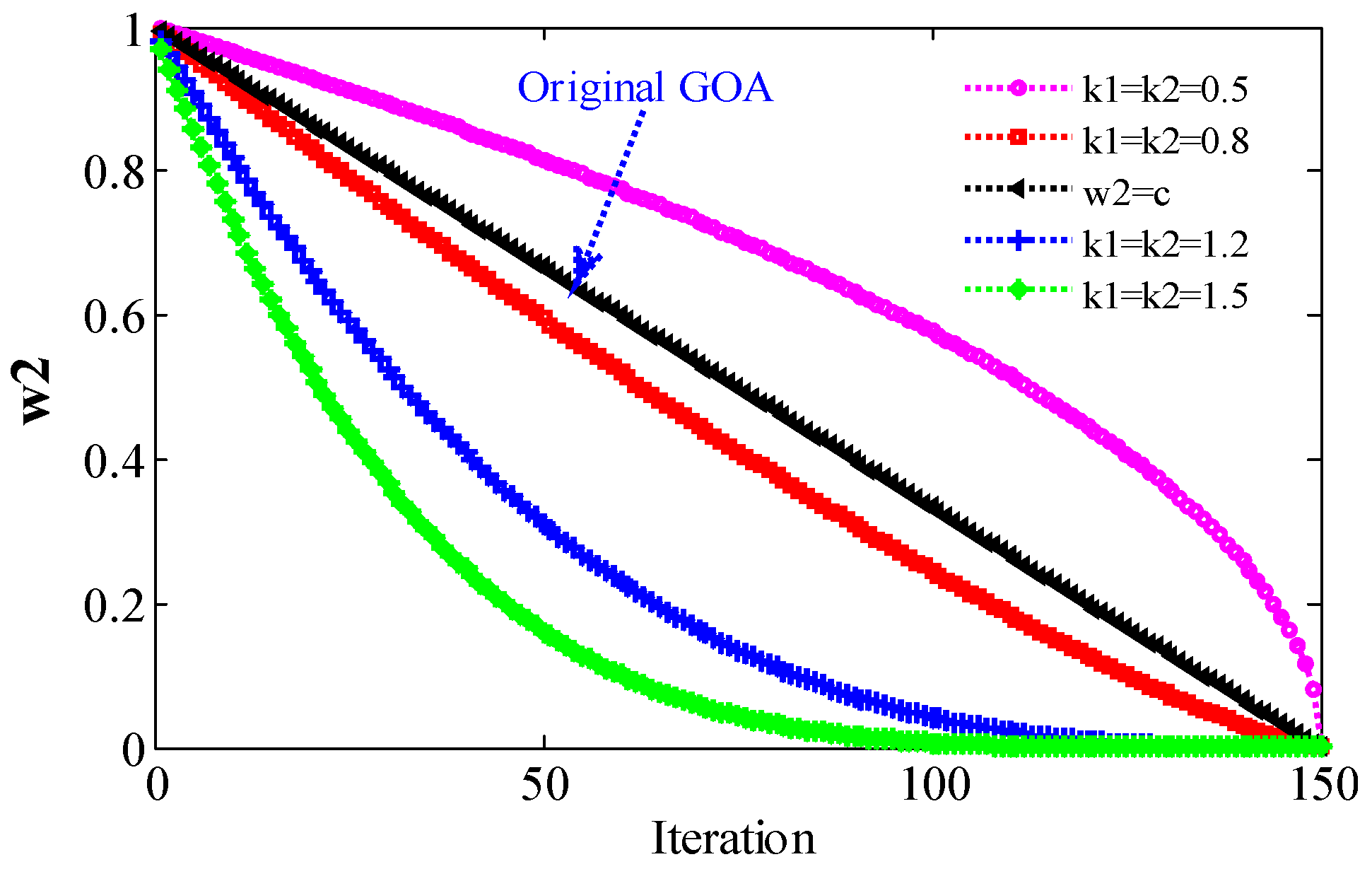
. The change trend of
is shown in
Figure 2. When
, it is the decreasing strategy of the original GOA.
Compared with the original GOA (), the decline rate of decline strategy (inner , ) is very slow. This means that the force between grasshoppers decreases slowly. Therefore, grasshoppers move rapidly in a wide parameter space and can explore a larger search space. From the theoretical analysis, the first problem of GOA can be solved.
Compared with the original GOA (), the decrement strategy (outer , ) has a fast decrement. This means that the movement speed of grasshoppers near the target decreases quickly. The grasshopper moves slowly in a small search space near the target, so the algorithm can obtain the global optimal solution. Theoretically, the second problem of GOA can be solved. The above two strategies are called IGOA, and the effects of different parameters will be discussed in the comparative experiments.
3.2. Construction of Optimization Model
In the stable operation stage, the signal energy depends on the bearing rotational frequency and its harmonics. When local damage occurs, the energy is gradually absorbed to the fault frequency [
36]. Therefore, the failover information can be characterized by energy entropy (
EE). In addition, the dependence between the original signal and the modes obtained by TVF-EMD can be characterized by mutual information (
MI). Considering these two factors, we proposed the energy entropy mutual information (
EEMI) index in this paper. In each decomposition process, the cumulative sum
of the
EEMI indexes of all IMFs is calculated. The maximization of
is the optimization problem of this paper.
where
is the fitness and
is the parameter to be optimized. In order to ensure the reliability of the parameter optimization, we optimize the two parameters within a relatively large parameter range. In order to ensure the reliability of the parameter optimization, we optimize the two parameters within a relatively large parameter range. The parameter range is
,
.
For each IMF,
EEMI is the product of
EE and
MI. The calculation of
EE for each mode is as follows:
where
is the mode of different frequency bands, and
is the energy distribution of the vibration signal in the frequency-domain. For ease of analysis, the energy is normalized, known as the energy coefficient (EC).
where
, the
EE of the IMF is defined by the Shannon entropy.
MI can be used to measure the dependence between the original signal
(denoted as
) and the mode
(denoted as
).
MI is more efficient than Cor [
27]. In the discrete domain, the mutual information between
and
is defined as follows, which is equivalent to Equation (20).
where
and
are the marginal probability distribution functions of
and
, respectively, and
represents the joint probability distribution function of
and
.
is the marginal entropy of
and
is the conditional entropy.
3.3. Proposed Parameter-Adaptive TVF-EMD
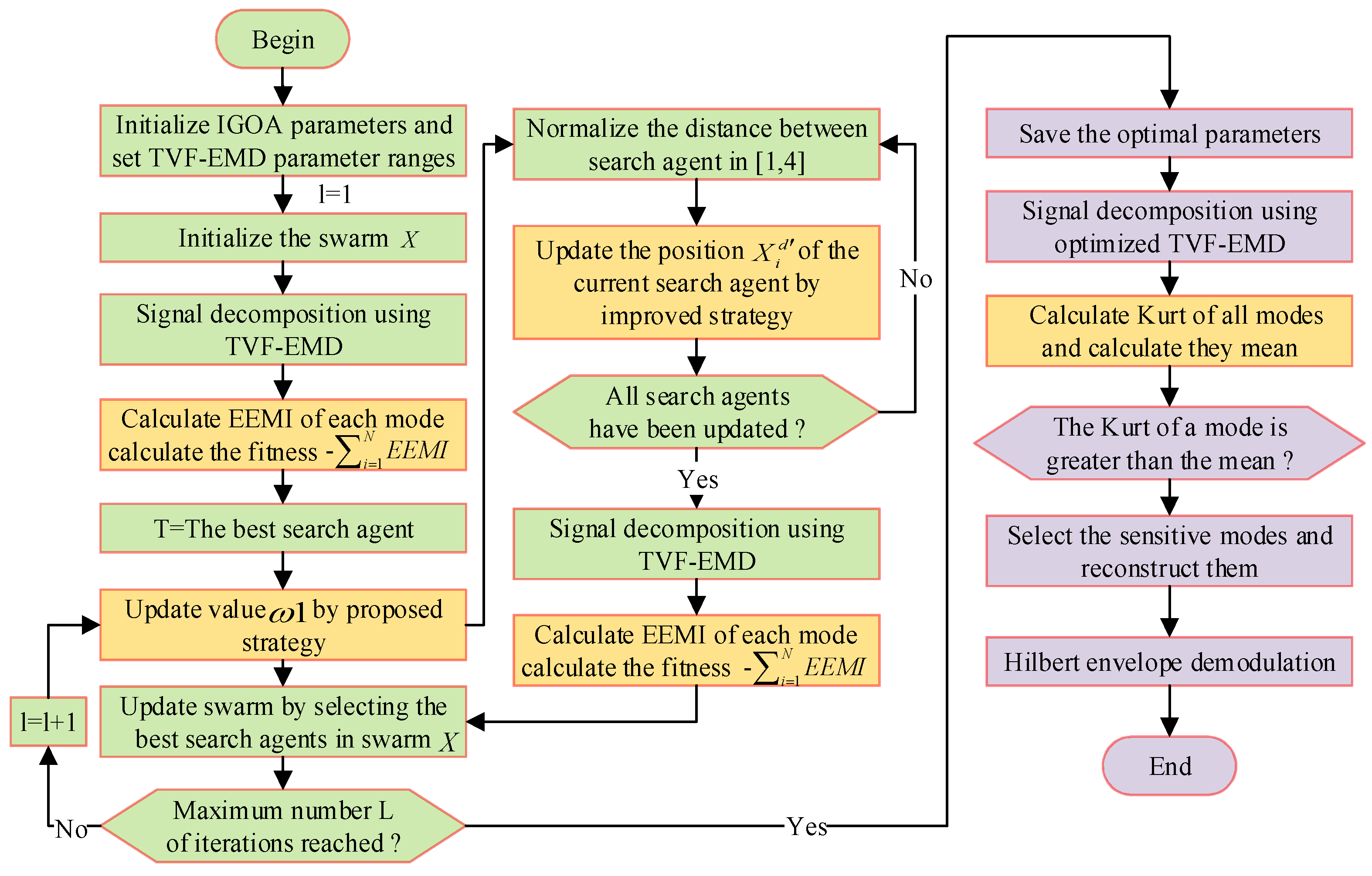
As shown in
Figure 3, the detailed steps of the proposed method are as follows:
(1) Set the parameter range of TVF-EMD, and initialize the parameters of IGOA and population , including search agent , Maxiter L, and .
(2) Use TVF-EMD to decompose the signal and calculate the EEMI index of the IMF to obtain the fitness . Store the best fitness and location.
(3) , update the parameter using the improved strategy (10).
(4) Normalize the distance between search agents to be between [1, 4]. Update the location of the search agent using an improved strategy (13).
(5) Determine whether all search agents have been updated, and if not, execute (4). Otherwise, execute (6).
(6) Use TVF-EMD to decompose the signal and calculate the fitness , store the best fitness and position.
(7) Update the population X by obtaining the best search agent.
(8) Judge whether the Maxiter is reached, if not, execute (3)~(7). Otherwise, obtain the best fitness and parameter combination.
(9) Use the optimized TVF-EMD to decompose the signal, and use the IMFs with kurtosis larger than the mean kurtosis as the sensitive mode.
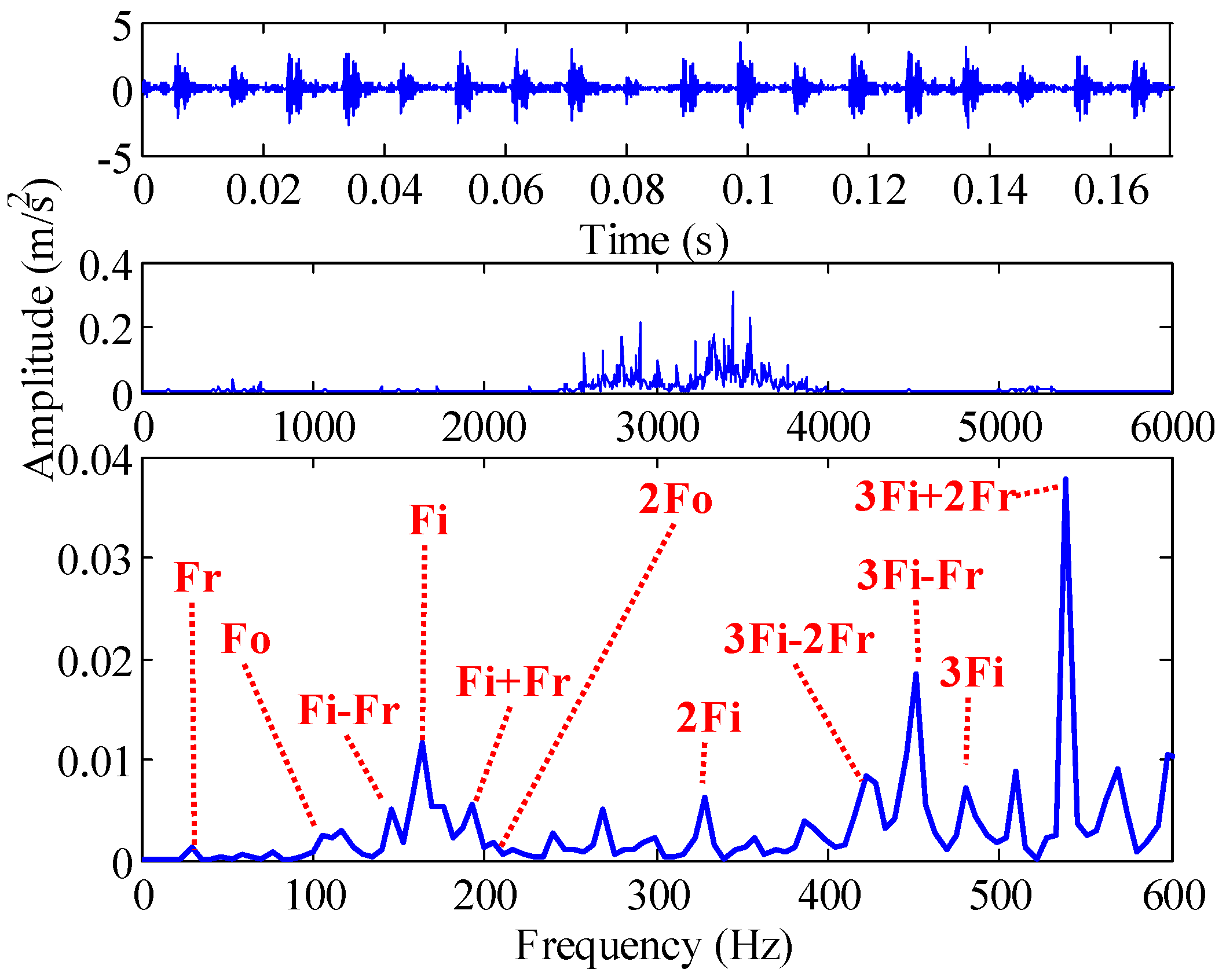
(10) Analyze the sensitive modes by Hilbert envelope demodulation.
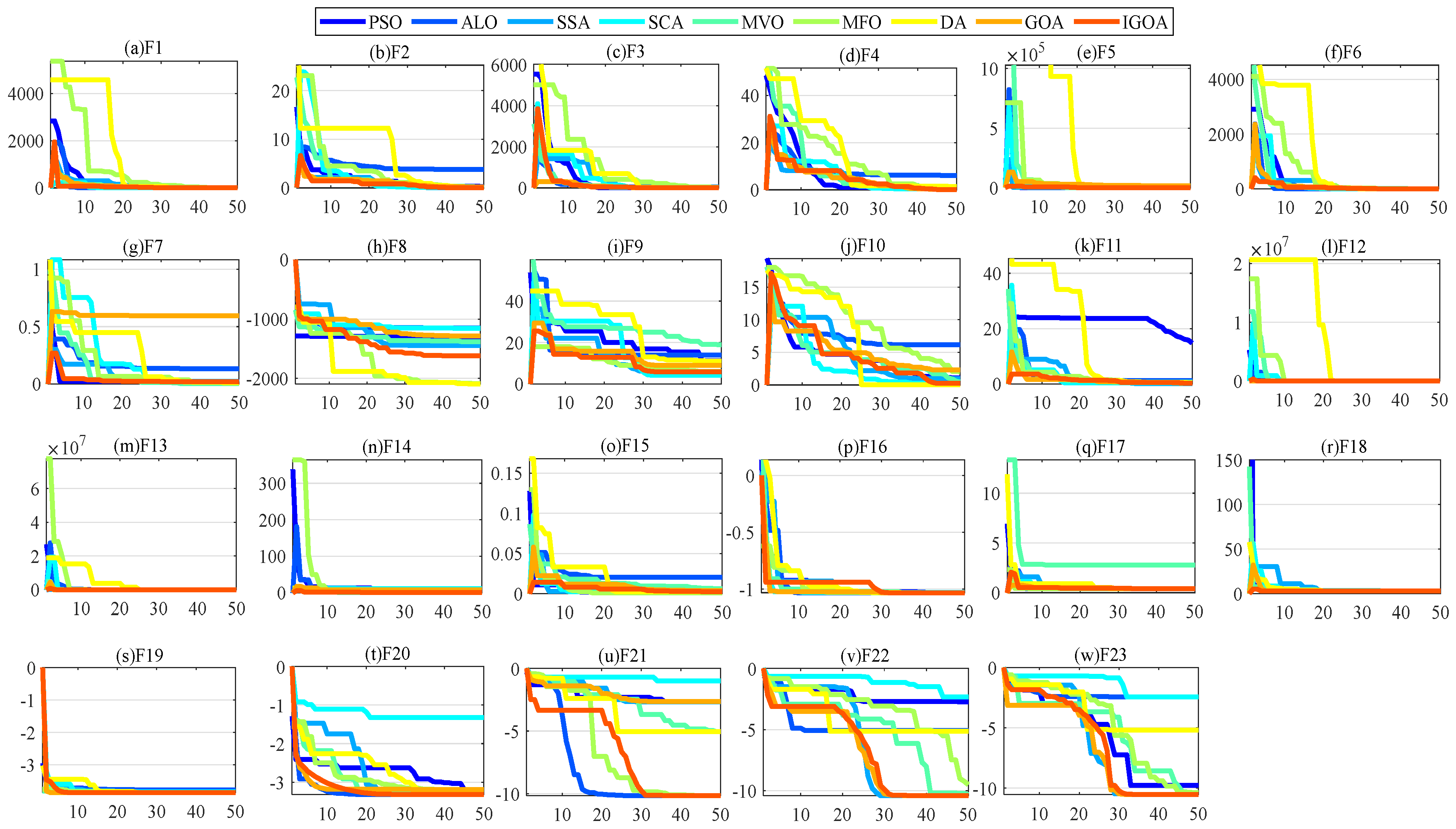
5. Conclusions
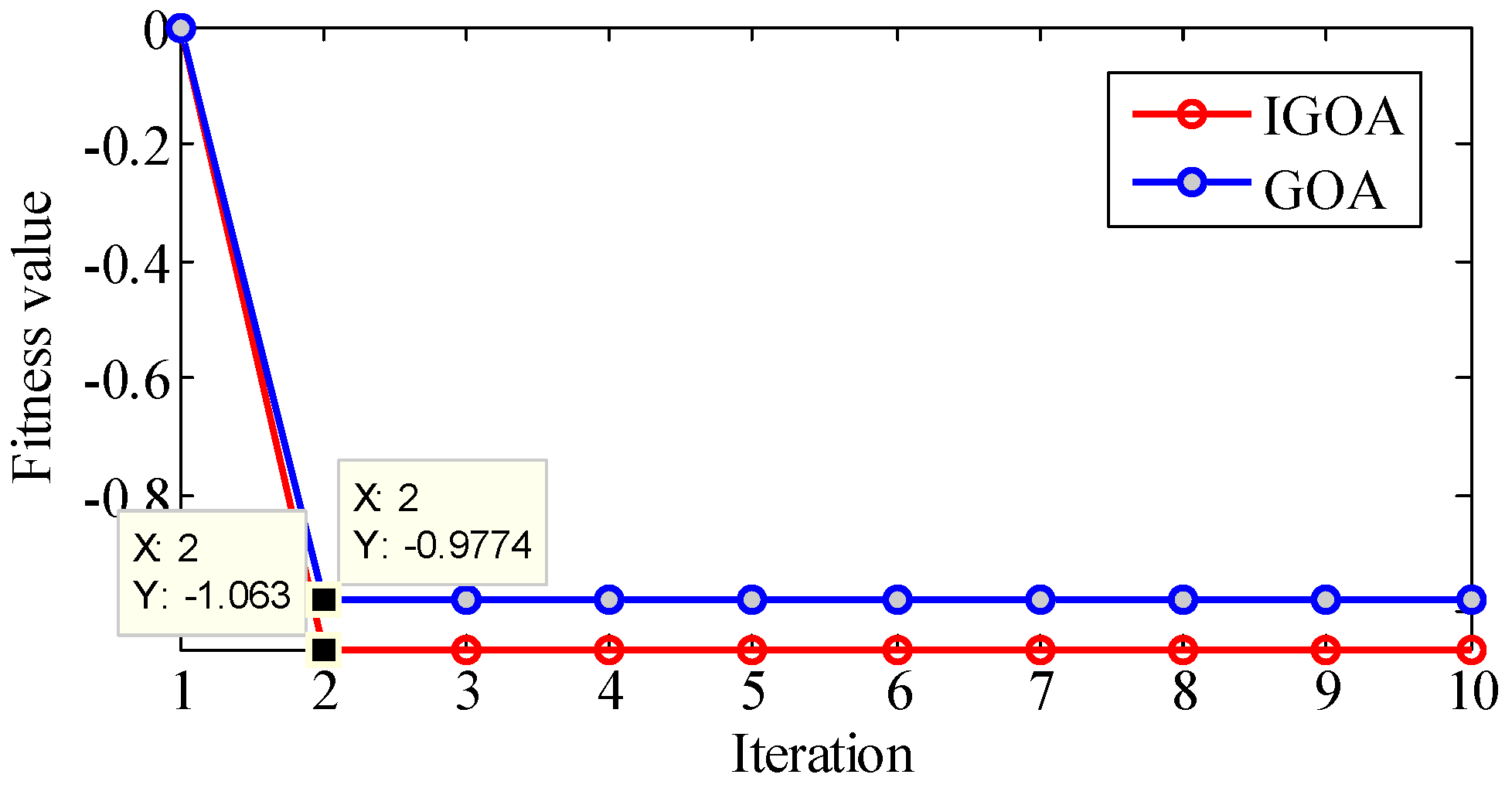
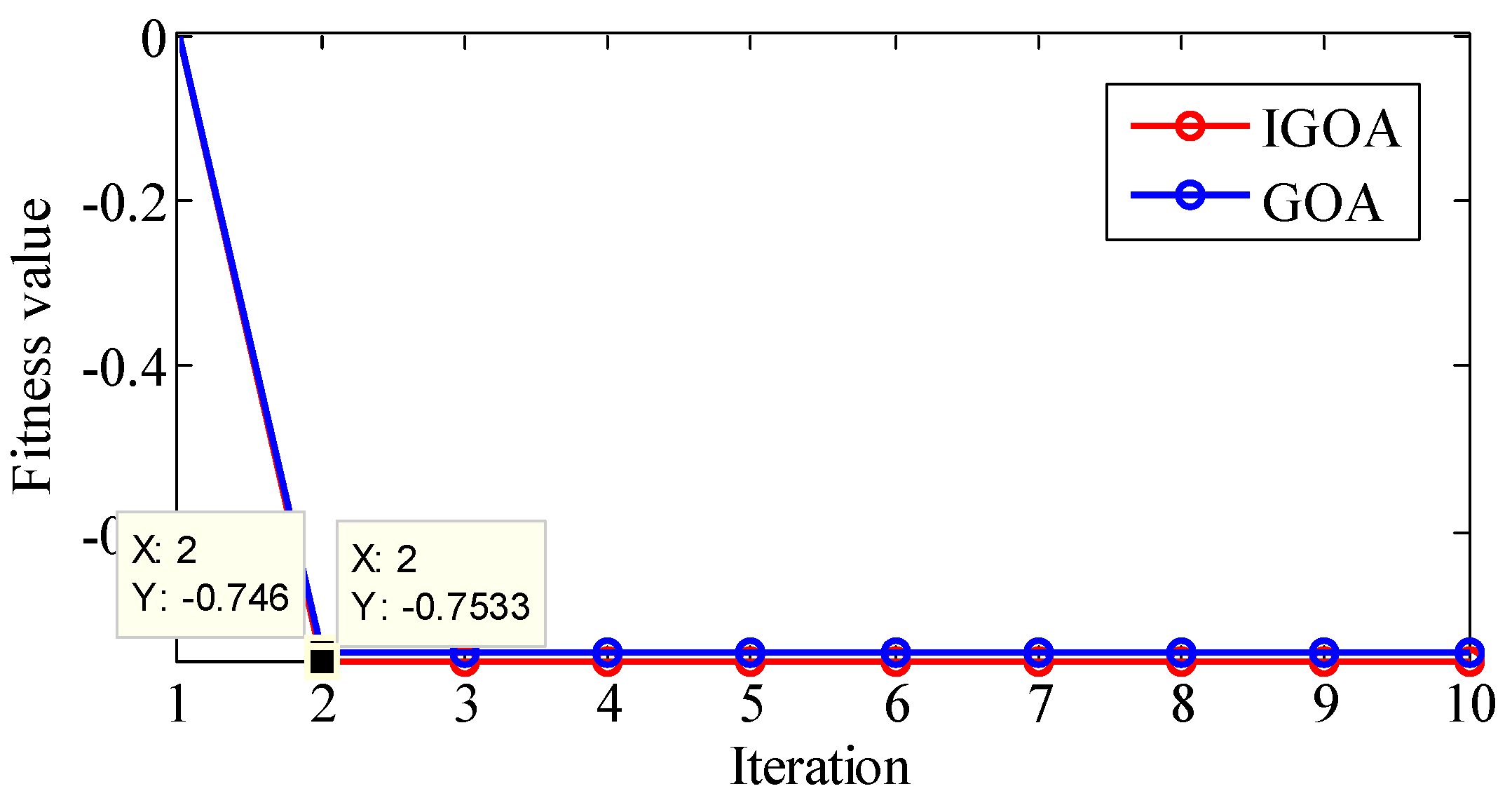
In order to accurately separate the sub-signals and extract the frequency information in the signal, a parameter-adaptive TVF-EMD feature extraction method based on IGOA is proposed in this paper. First, we introduce a nonlinear decreasing strategy to dynamically adjust the two decreasing coefficients of GOA in this paper. Then, 23 sets of benchmark functions are optimized by IGOA, and the influence of IGOA parameters on the results is discussed. When the coefficient of IGOA is 0.8, its comprehensive optimization performance is the best compared with other methods, and the time complexity is almost unchanged. Then, the EEMI index is introduced to comprehensively consider the energy distribution of the modal and the dependence between the IMFs and the original signal, and it is taken as the objective function. Next, TVF-EMD parameters are optimized by IGOA and the optimal parameters matching the input signal are obtained. Finally, sensitive modes with larger kurtosis are analyzed to extract the characteristic frequency of the signal. The proposed method is used to analyze two sets of simulation signals and bearing vibration signals. The results show that: (1) the method can adaptively determine the parameters of TVF-EMD according to the signal features, and it solved the problems of under-decomposition, over-decomposition and mode aliasing of TVF-EMD effectively; (2) the fitness obtained by IGOA is smaller than that obtained by GOA. Compared with GOA and other algorithms, the comprehensive optimization performance of IGOA is stronger, so the proposed IGOA is effective; (3) the EEMI index is effective because it considers the energy distribution and correlation of the signal comprehensively, and it is more sensitive to the parameters of TVF-EMD than Cor, Kurt, EC, and EE; and (4) the decomposition accuracy of the adaptive TVF-EMD based on IGOA is high, the energy leakage is very small, and meaningful modes can be obtained by decomposition. Therefore, the method proposed in this paper is effective, and the method has potential application value in the field of mechanical fault diagnosis.


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}