



AIS Trajectories Simplification Algorithm Considering Topographic Information


Abstract
1. Introduction
2. Methods
2.1. AIS Data Preprocessing
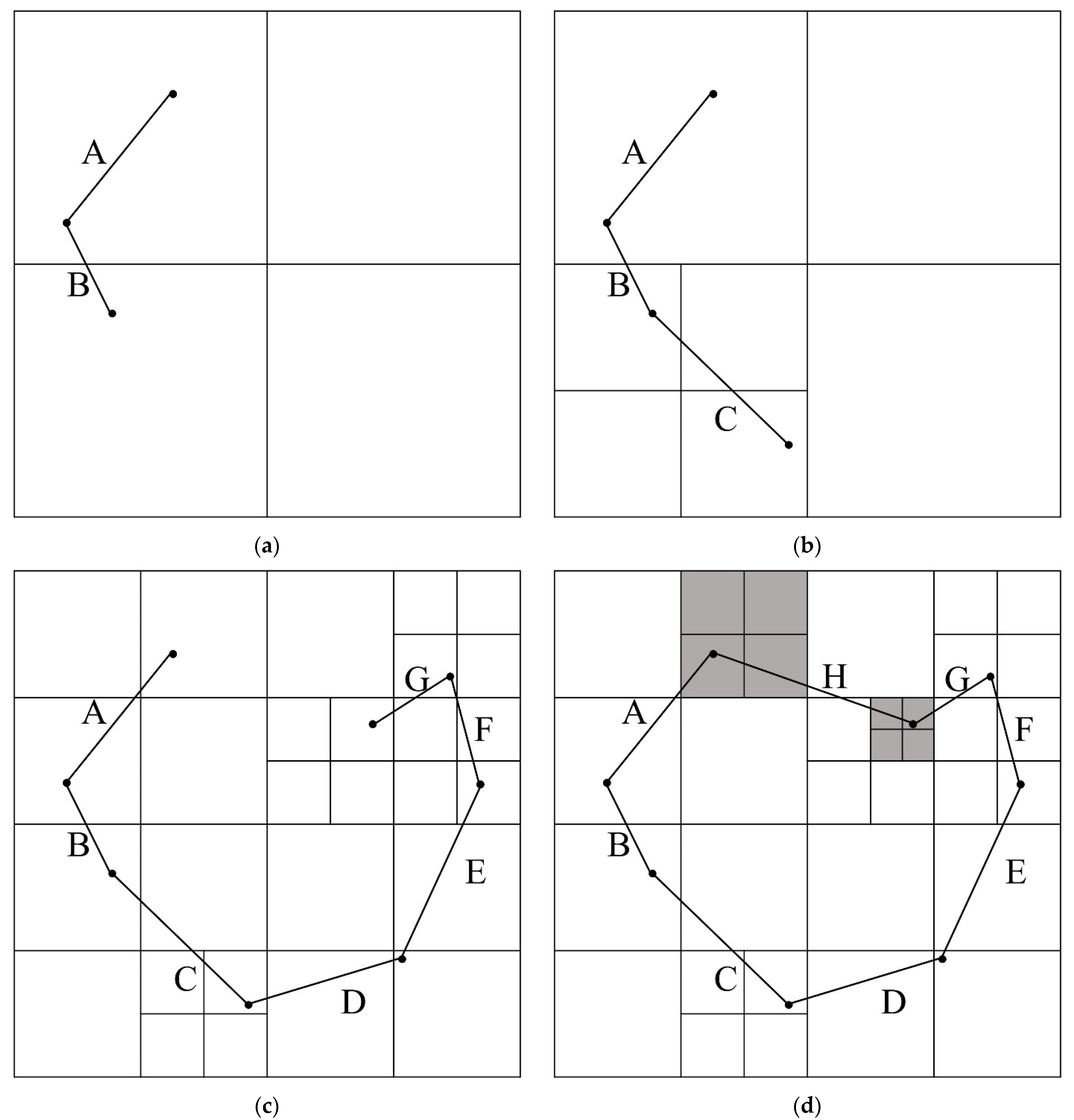
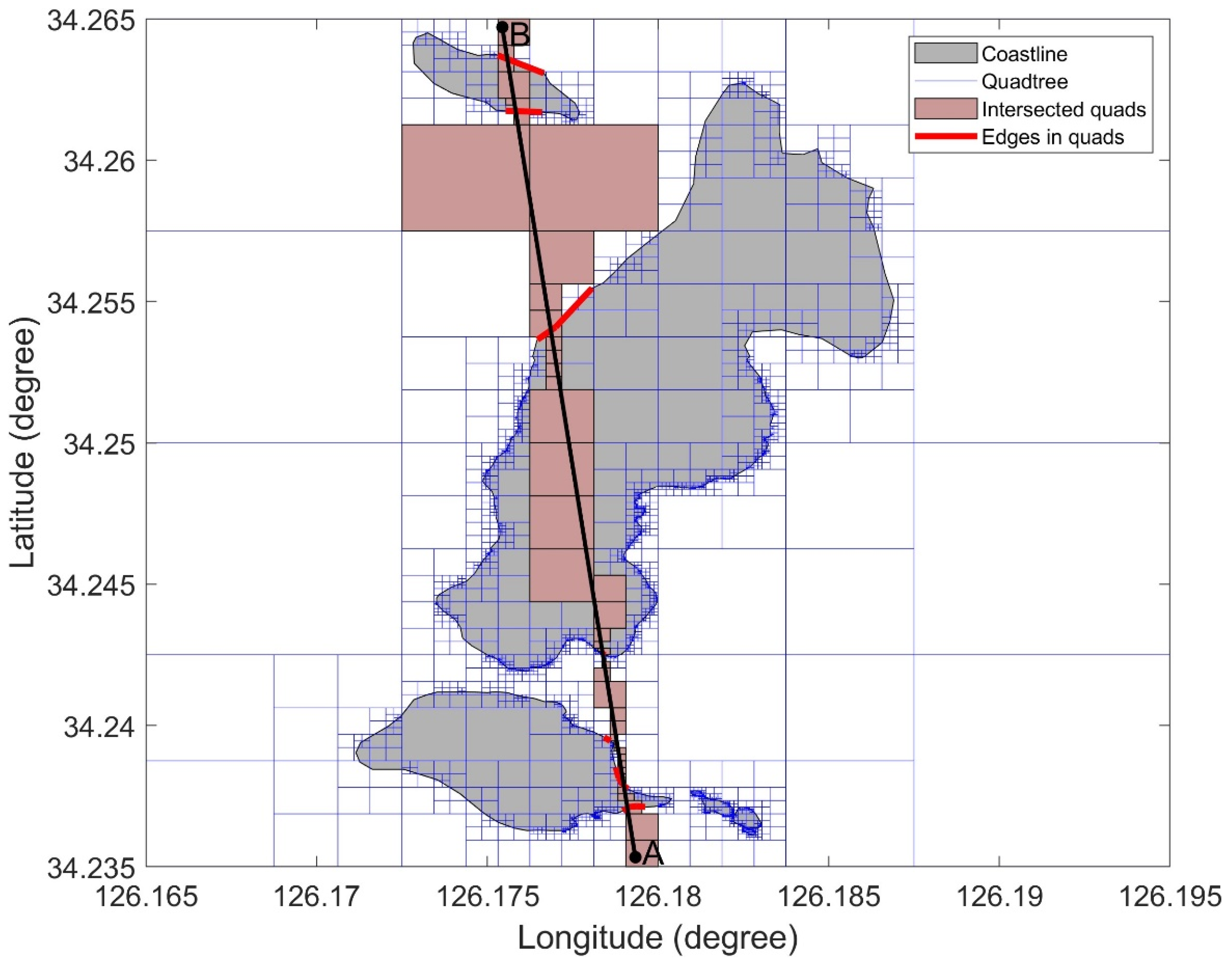
2.2. ILP Algorithm Using Quadtree
| Algorithm 1 Edge acquisition in quads intersecting with line | |
| Input: | |
| Output: | |
| 1: | function LineIntersectPoly() |
| 2: | GetEdges |
| 3: | for = 1 to N //N is the number of edges in |
| 4: | If () then return true |
| 5: | end for |
| 6: | return false |
| 7: | end function |
| 8: | function GetEdges |
| 9: | if .child and .edges then |
| 10: | .append(.edges) |
| 11: | else |
| 12: | child = {NE, NW, SE, SW} |
| 13: | for i = 1:4 do |
| 14: | if .bound () then |
| 15: | GetEdges |
| 16: | end if |
| 17: | end for |
| 18: | end if |
| 19: | end function |
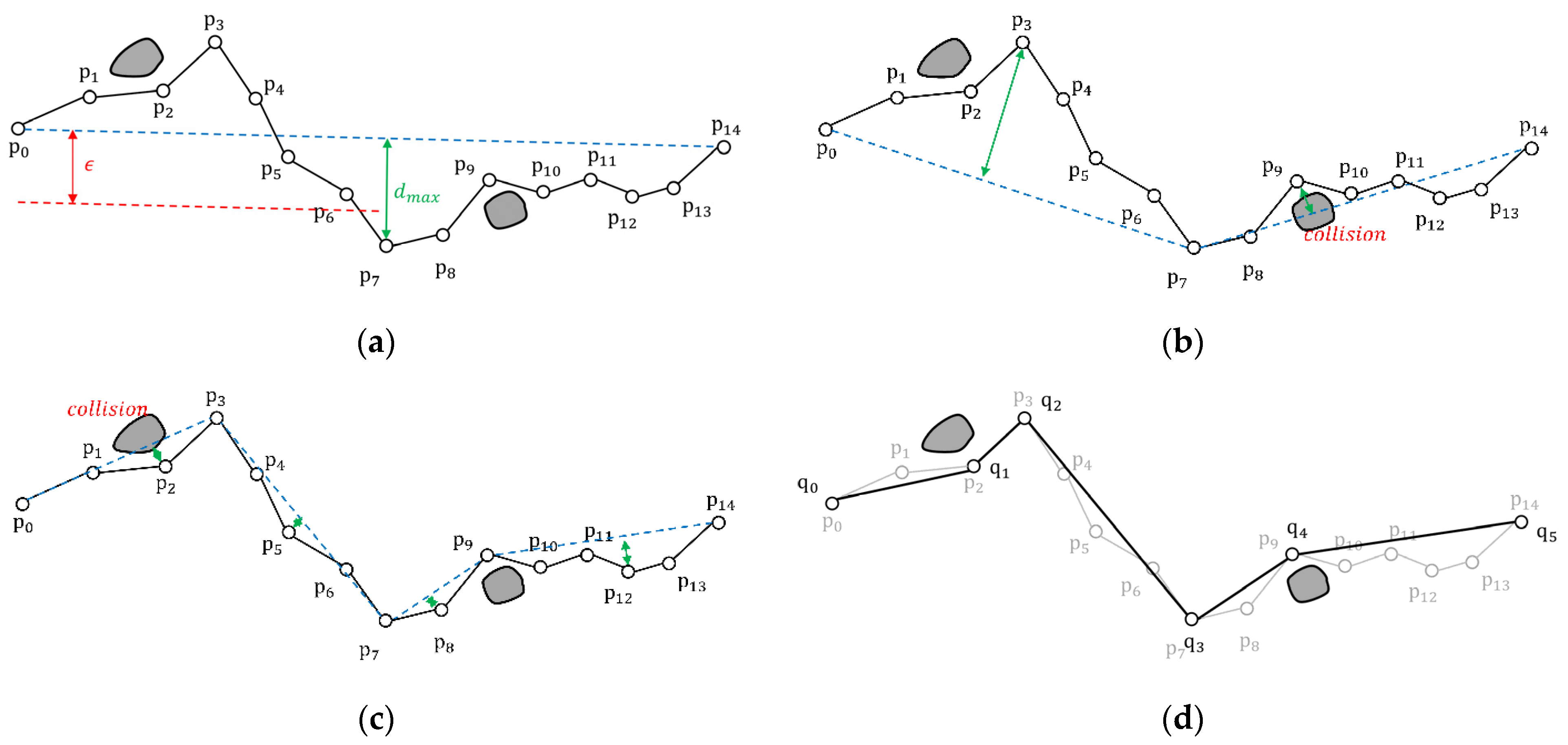
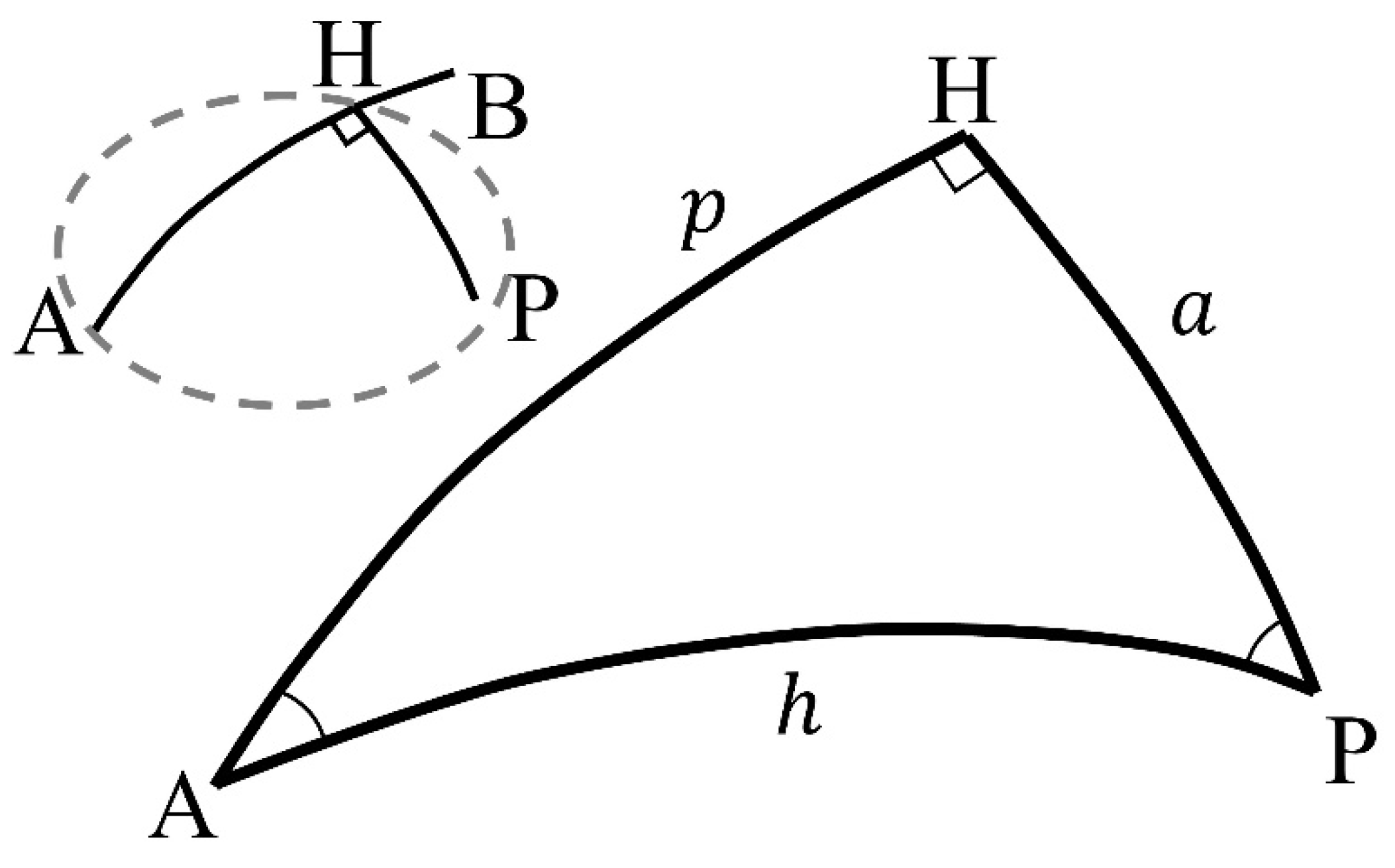
2.3. Trajectory Simplification Algorithm Considering Topographic Information
| Algorithm 2 ODP algorithm | |
| Input: (trajectory), (threshold) | |
| Output: (simplified trajectory) | |
| 1: | function Obstacle_DP |
| 2: | n .size() |
| 3: | , = PerpendicularGeoDistance (, ) |
| 4: | if or LineIntersectPoly |
| 5: | result1 Obstacle_DP |
| 6: | result2 Obstacle_DP |
| 7: | s_trj = [result1 result2] |
| 8: | else |
| 9: | s_trj = [ ] |
| 10: | end if |
| 11: | end function |
2.4. Evaluation Metric
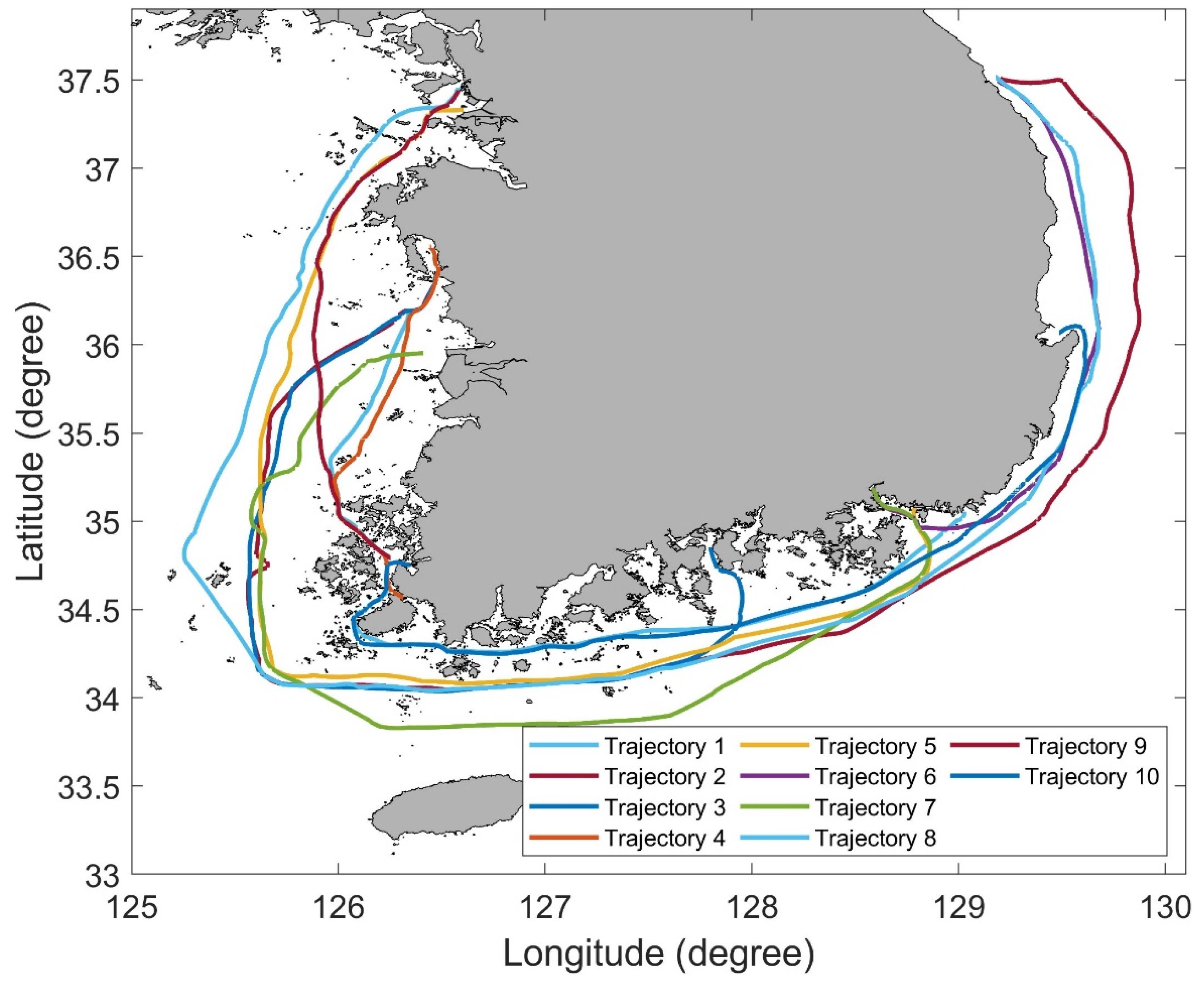
3. Results
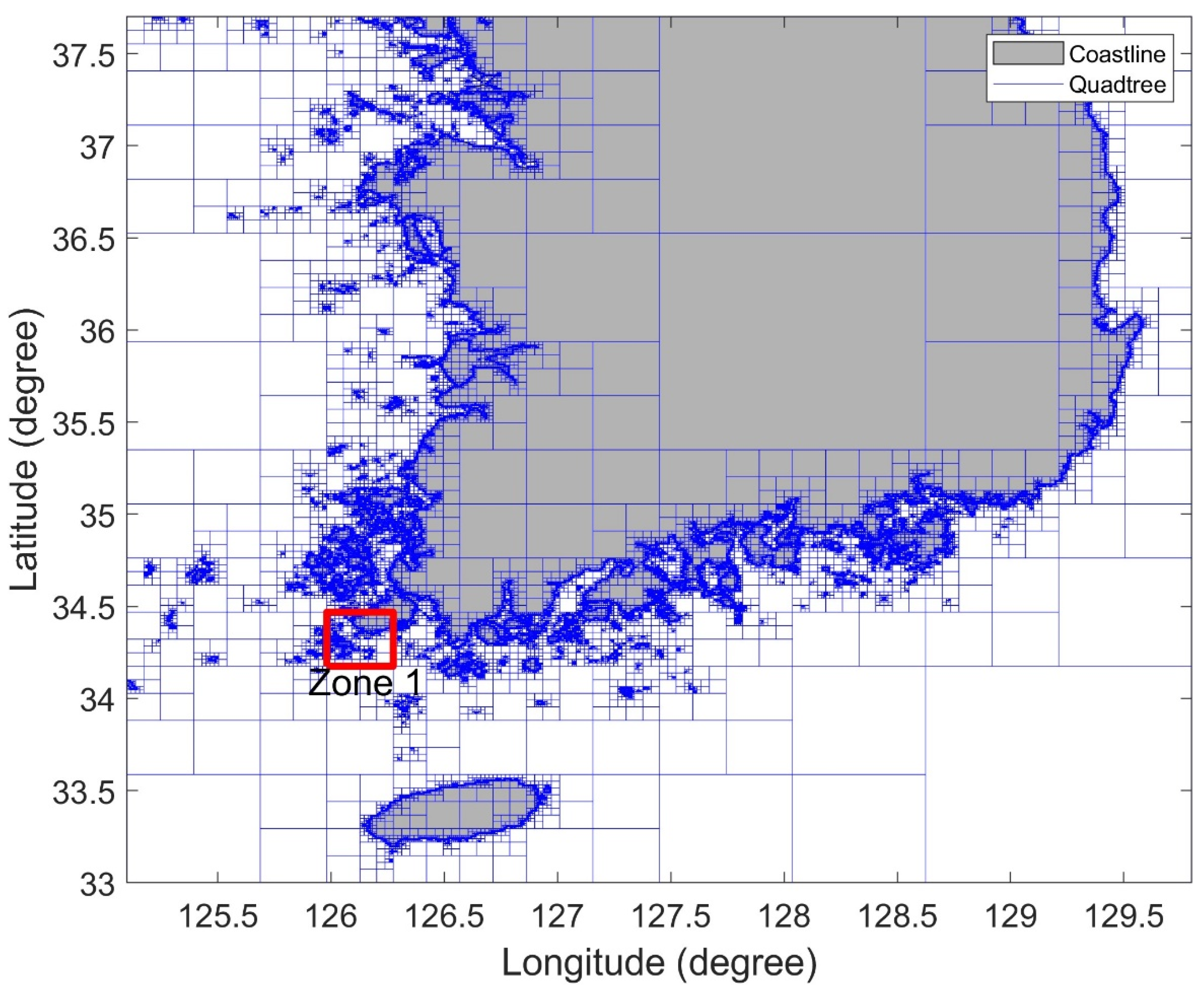
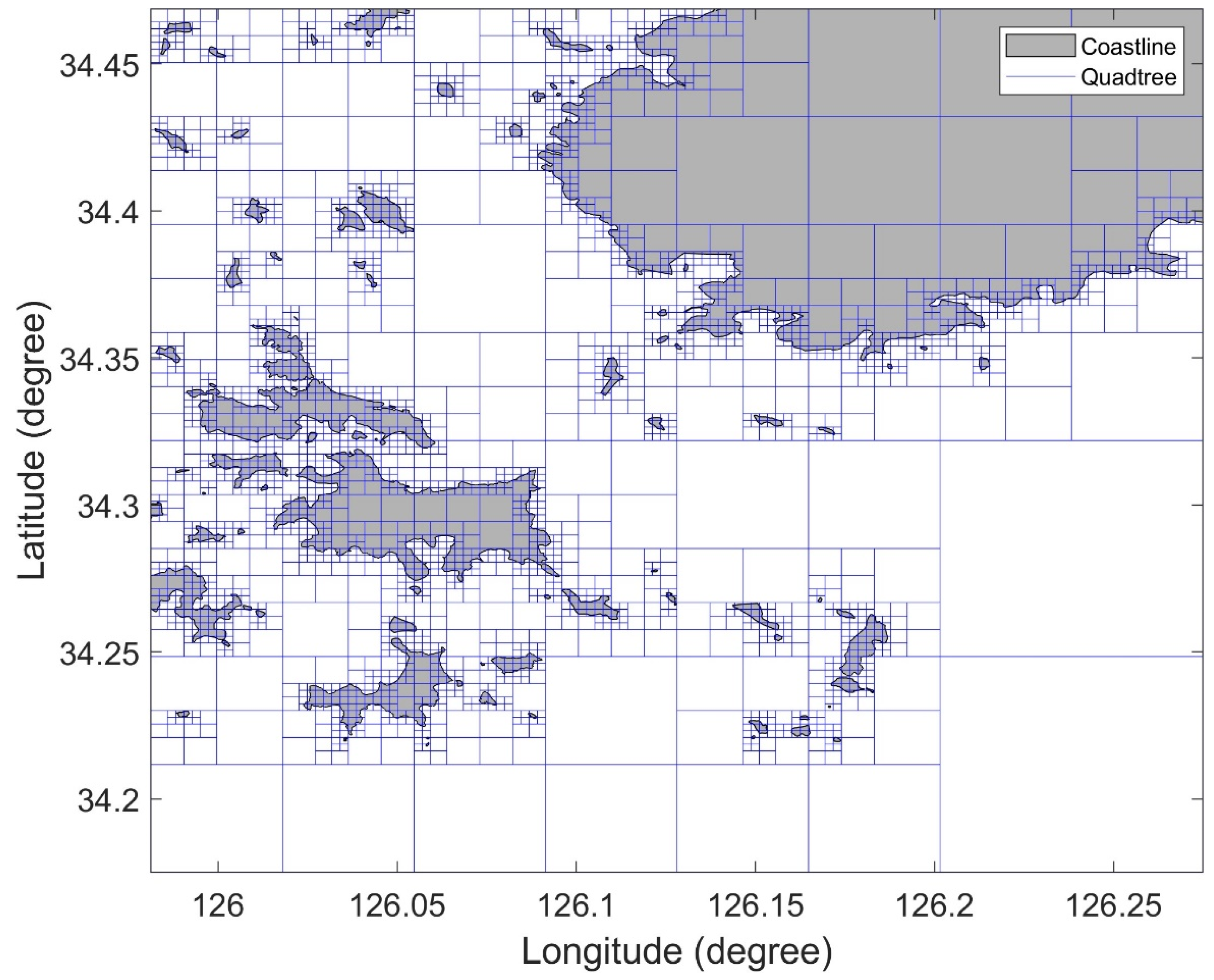
3.1. Comparison of Quadtree and Uniform Method
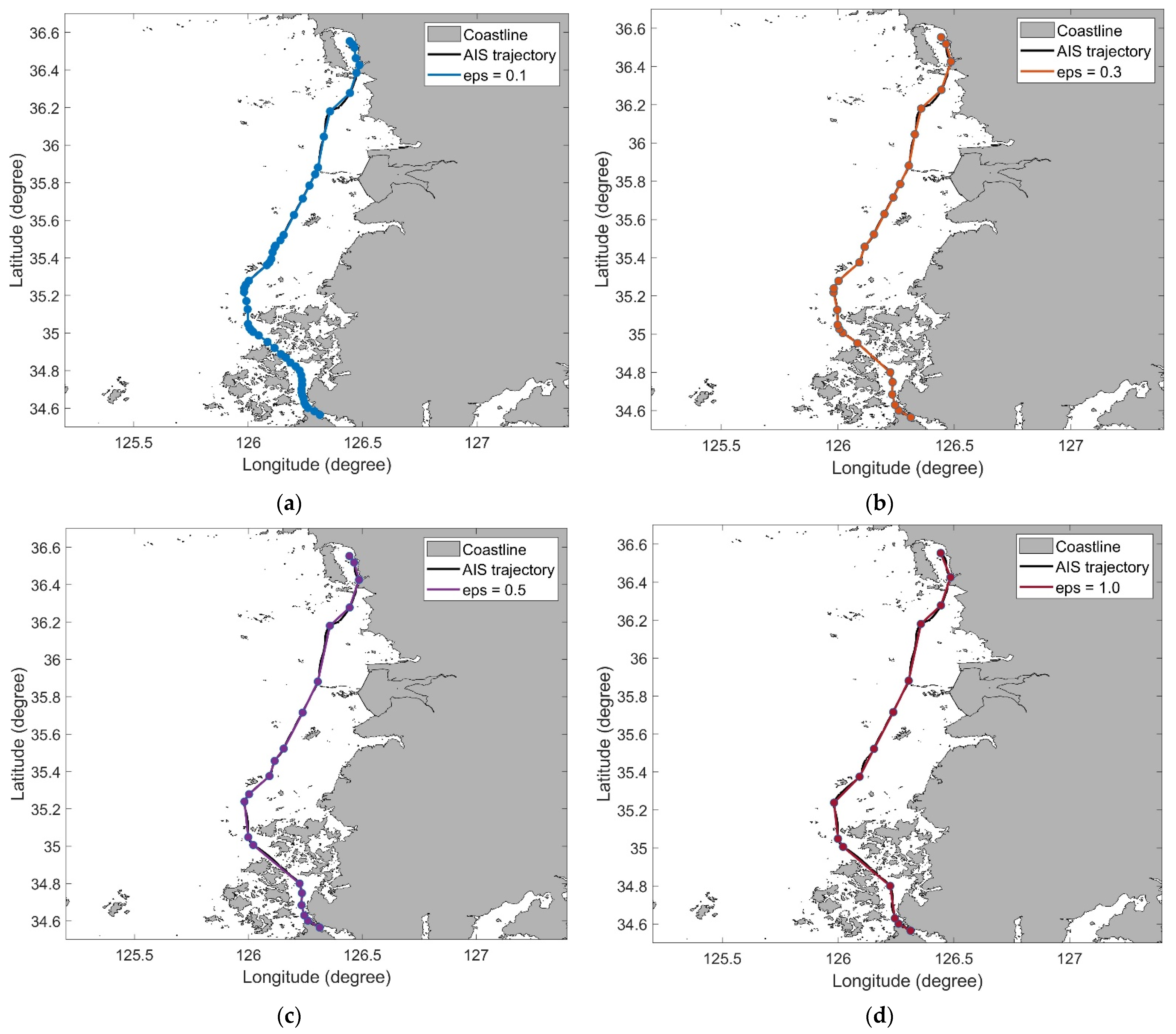
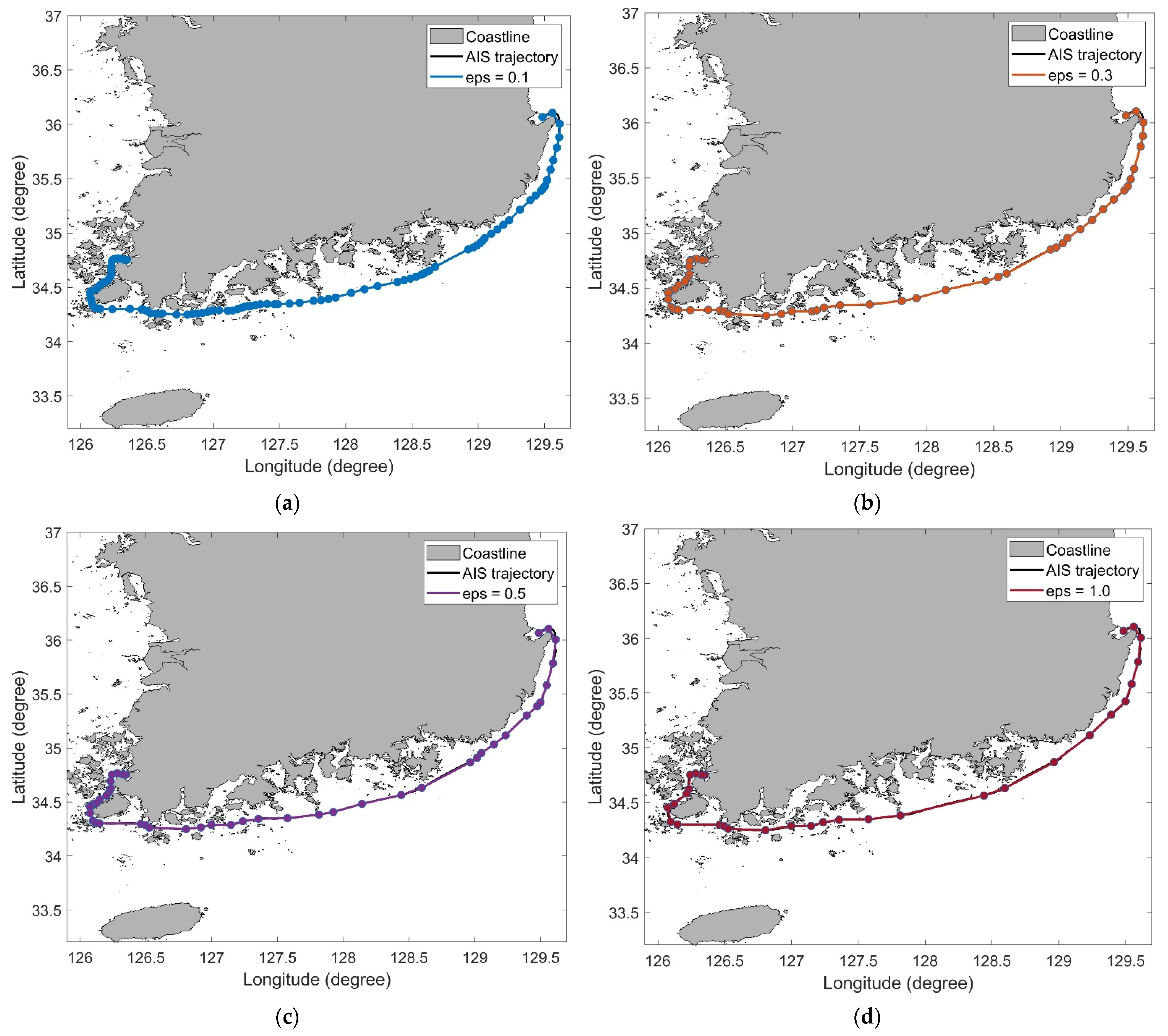
3.2. Comparison of AIS Trajectory Simplification Results between the ODP and DP Algorithm
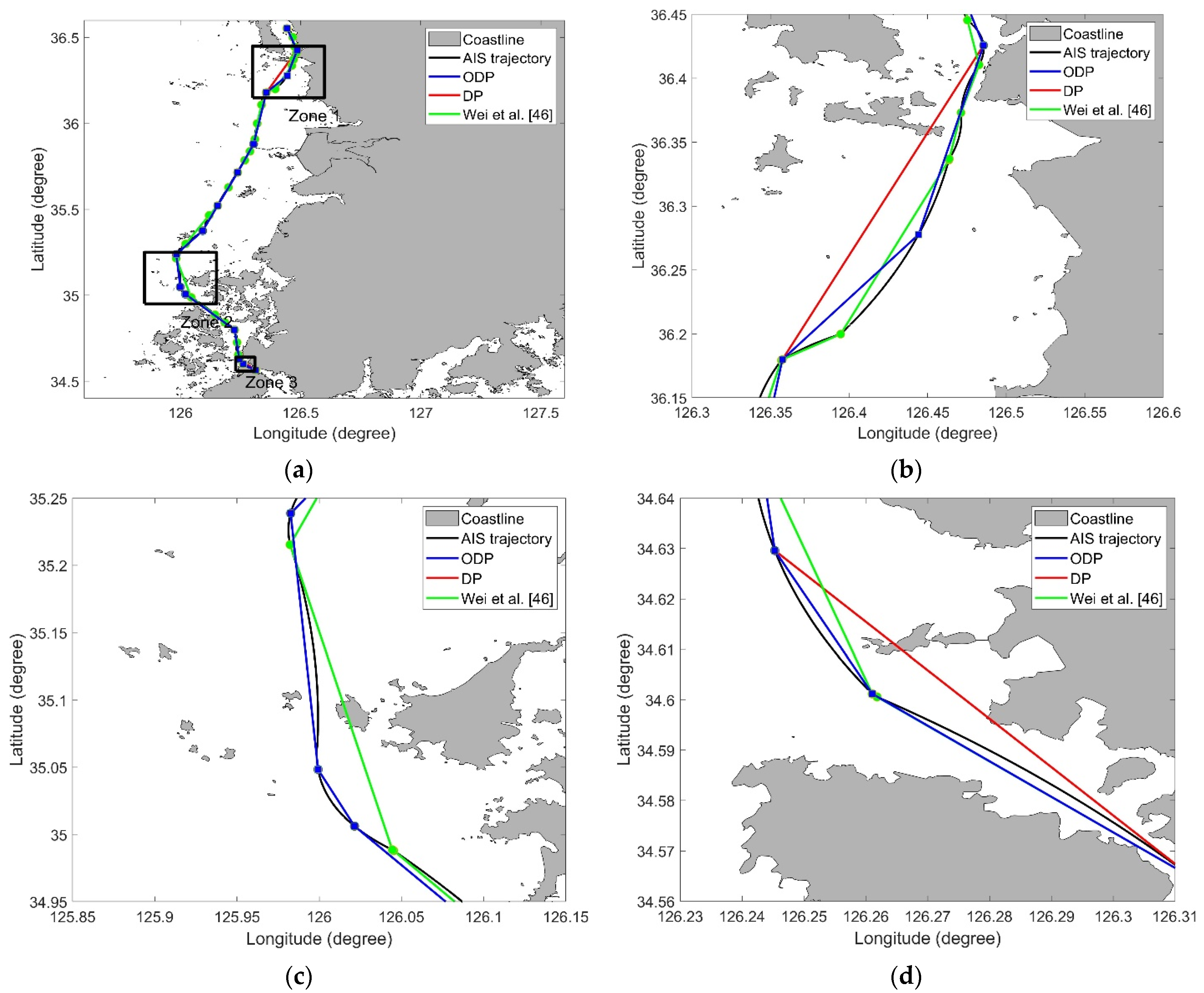
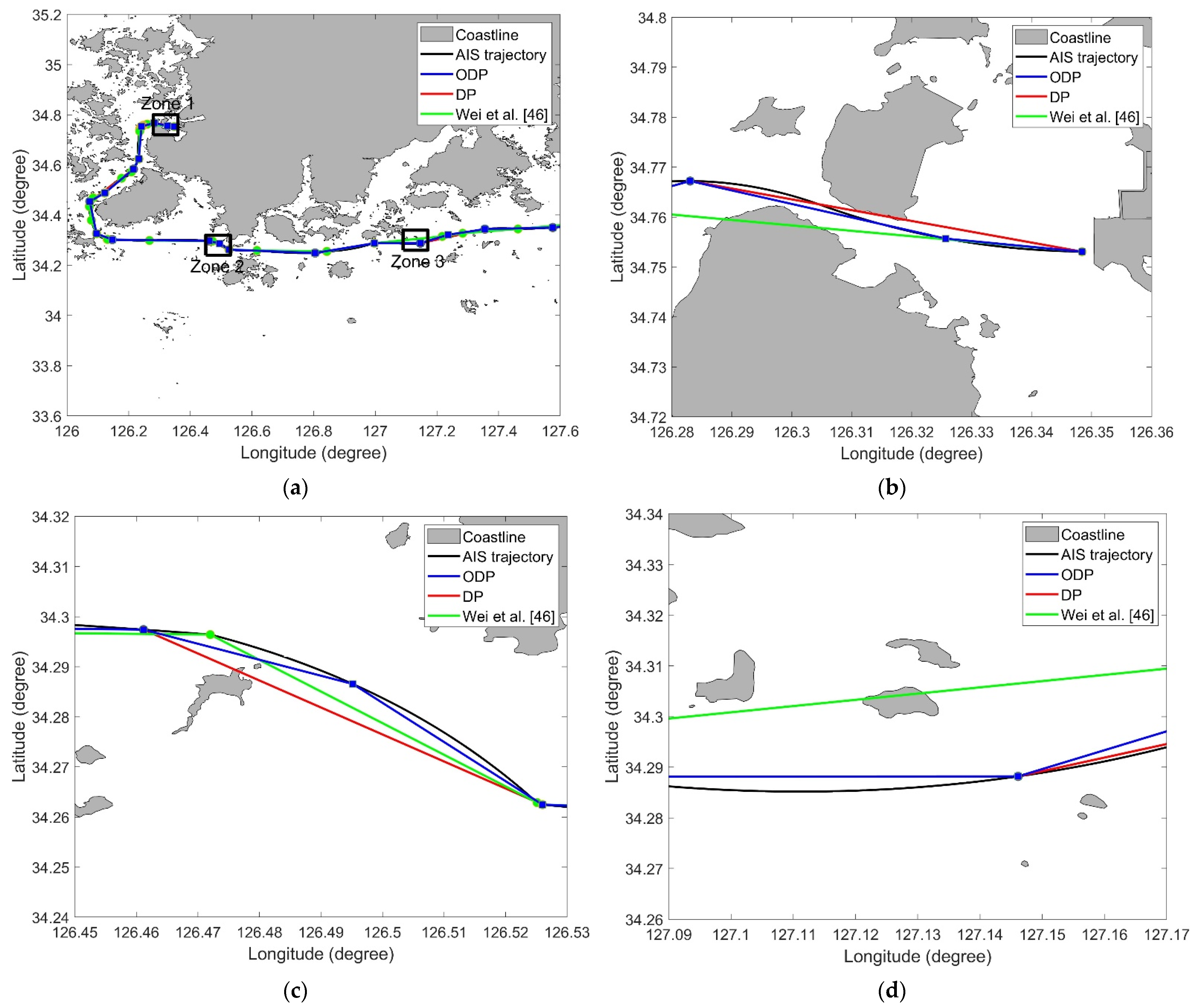
3.3. Comparison with Other Methods
3.4. Computation Efficiency of the ODP Algorithm with PMR Quadtree
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- International Maritime Organisation (IMO). Guidelines for the Onboard Operational Use of Shipborne Automatic Identification Systems (AIS); International Maritime Organisation (IMO): London, UK, 2002. [Google Scholar]
- Harati-Mokhtari, A.; Wall, A.; Brooks, P.; Wang, J. Automatic Identification System (AIS): Data reliability and human error implications. J. Navig. 2007, 60, 373–389. [Google Scholar] [CrossRef]
- Filipiak, D.; Węcel, K.; Stróżyna, M.; Michalak, M.; Abramowicz, W. Extracting maritime traffic networks from AIS data using evolutionary algorithm. Bus. Inf. Syst. Eng. 2020, 62, 435–450. [Google Scholar] [CrossRef]
- Wang, G.; Meng, J.; Han, Y. Extraction of maritime road networks from large-scale AIS data. IEEE Access 2019, 7, 123035–123048. [Google Scholar] [CrossRef]
- Liu, T.; Ma, J. Ship Navigation Behavior Prediction Based on AIS Data. IEEE Access 2022, 10, 47997–48008. [Google Scholar] [CrossRef]
- Murray, B.; Perera, L.P. An AIS-based deep learning framework for regional ship behavior prediction. Reliab. Eng. Syst. Saf. 2021, 215, 107819. [Google Scholar] [CrossRef]
- Suo, Y.; Ji, Y.; Zhang, Z.; Chen, J.; Claramunt, C. A Formal and Visual Data-Mining Model for Complex Ship Behaviors and Patterns. Sensors 2022, 22, 5281. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, W. Dynamic Maritime Traffic Pattern Recognition with Online Cleaning, Compression, Partition, and Clustering of AIS Data. Sensors 2022, 22, 6307. [Google Scholar] [CrossRef]
- Suo, Y.; Chen, W.; Claramunt, C.; Yang, S. A ship trajectory prediction framework based on a recurrent neural network. Sensors 2020, 20, 5133. [Google Scholar] [CrossRef]
- Sørensen, K.A.; Heiselberg, P.; Heiselberg, H. Probabilistic Maritime Trajectory Prediction in Complex Scenarios Using Deep Learning. Sensors 2022, 22, 2058. [Google Scholar] [CrossRef]
- Pelot, R.; Akbari, A.; Li, L. Vessel location modeling for maritime search and rescue. In Applications of Location Analysis; Springer: Berlin/Heidelberg, Germany, 2015; pp. 369–402. [Google Scholar]
- Wielgosz, M.; Malyszko, M. Multi-Criteria Selection of Surface Units for SAR Operations at Sea Supported by AIS Data. Remote Sens. 2021, 13, 3151. [Google Scholar] [CrossRef]
- Ferreira, M.D.; Spadon, G.; Soares, A.; Matwin, S. A Semi-Supervised Methodology for Fishing Activity Detection Using the Geometry behind the Trajectory of Multiple Vessels. Sensors 2022, 22, 6063. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.S.; Lee, H.T.; Cho, I.S. Maritime Traffic Route Detection Framework Based on Statistical Density Analysis From AIS Data Using a Clustering Algorithm. IEEE Access 2022, 10, 23355–23366. [Google Scholar] [CrossRef]
- Yan, Z.; Xiao, Y.; Cheng, L.; He, R.; Ruan, X.; Zhou, X.; Li, M.; Bin, R. Exploring AIS data for intelligent maritime routes extraction. Appl. Ocean Res. 2020, 101, 102271. [Google Scholar] [CrossRef]
- Karataş, G.B.; Karagoz, P.; Ayran, O. Trajectory pattern extraction and anomaly detection for maritime vessels. Internet Things 2021, 16, 100436. [Google Scholar] [CrossRef]
- Rong, H.; Teixeira, A.; Soares, C.G. Data mining approach to shipping route characterization and anomaly detection based on AIS data. Ocean Eng. 2020, 198, 106936. [Google Scholar] [CrossRef]
- Sánchez-Heres, L.F. Simplification and event identification for ais trajectories: The equivalent passage plan method. J. Navig. 2019, 72, 307–320. [Google Scholar] [CrossRef]
- Li, H.; Liu, J.; Liu, R.W.; Xiong, N.; Wu, K.; Kim, T.h. A dimensionality reduction-based multi-step clustering method for robust vessel trajectory analysis. Sensors 2017, 17, 1792. [Google Scholar] [CrossRef]
- Last, P.; Bahlke, C.; Hering-Bertram, M.; Linsen, L. Comprehensive analysis of automatic identification system (AIS) data in regard to vessel movement prediction. J. Navig. 2014, 67, 791–809. [Google Scholar] [CrossRef]
- Iphar, C.; Napoli, A.; Ray, C. Detection of false AIS messages for the improvement of maritime situational awareness. In Proceedings of the Oceans 2015-mts/ieee washington, Washington, DC, USA, 19–22 October 2015; pp. 1–7. [Google Scholar]
- Tu, E.; Zhang, G.; Rachmawati, L.; Rajabally, E.; Huang, G.B. Exploiting AIS data for intelligent maritime navigation: A comprehensive survey from data to methodology. IEEE Trans. Intell. Transp. Syst. 2017, 19, 1559–1582. [Google Scholar] [CrossRef]
- Makris, A.; Kontopoulos, I.; Alimisis, P.; Tserpes, K. A comparison of trajectory compression algorithms over AIS data. IEEE Access 2021, 9, 92516–92530. [Google Scholar] [CrossRef]
- Qi, L.; Zheng, Z. A measure of similarity between trajectories of vessels. J. Eng. Sci. Technol. Rev. 2016, 9, 17–22. [Google Scholar] [CrossRef]
- Pallotta, G.; Vespe, M.; Bryan, K. Vessel pattern knowledge discovery from AIS data: A framework for anomaly detection and route prediction. Entropy 2013, 15, 2218–2245. [Google Scholar] [CrossRef]
- De Vries, G.K.D.; Van Someren, M. Machine learning for vessel trajectories using compression, alignments and domain knowledge. Expert Syst. Appl. 2012, 39, 13426–13439. [Google Scholar] [CrossRef]
- Patroumpas, K.; Alevizos, E.; Artikis, A.; Vodas, M.; Pelekis, N.; Theodoridis, Y. Online event recognition from moving vessel trajectories. GeoInformatica 2017, 21, 389–427. [Google Scholar] [CrossRef]
- Zhao, L.; Shi, G. A trajectory clustering method based on Douglas-Peucker compression and density for marine traffic pattern recognition. Ocean Eng. 2019, 172, 456–467. [Google Scholar] [CrossRef]
- Fikioris, G.; Patroumpas, K.; Artikis, A. Optimizing vessel trajectory compression. In Proceedings of the 2020 21st IEEE International Conference on Mobile Data Management (MDM), Versailles, France, 30 June–3 July 2020; pp. 281–286. [Google Scholar]
- Feng, C.; Fu, B.; Luo, Y.; Li, H. The Design and Development of a Ship Trajectory Data Management and Analysis System Based on AIS. Sensors 2021, 22, 310. [Google Scholar] [CrossRef]
- Zhang, S.K.; Liu, Z.J.; Cai, Y.; Wu, Z.L.; Shi, G.Y. AIS trajectories simplification and threshold determination. J. Navig. 2016, 69, 729–744. [Google Scholar] [CrossRef]
- Shi, W.; Cheung, C. Performance evaluation of line simplification algorithms for vector generalization. Cartogr. J. 2006, 43, 27–44. [Google Scholar] [CrossRef]
- Ji, Y.; Xu, W.; Deng, A. A Study of Vessel Trajectory Compression Based on Vector Data Compression Algorithms. In International Conference on Business Information Systems; Springer: Berlin/Heidelberg, Germany, 2019; pp. 473–484. [Google Scholar]
- Qi, L.; Ji, Y. Ship trajectory data compression algorithms for Automatic Identification System: Comparison and analysis. J. Water Resour. Ocean. Sci. 2020, 9, 42. [Google Scholar] [CrossRef]
- Douglas, D.H.; Peucker, T.K. Algorithms for the reduction of the number of points required to represent a digitized line or its caricature. Cartographica 1973, 10, 112–122. [Google Scholar] [CrossRef]
- Opheim, H. Fast data reduction of a digitized curve. Geo-processing 1982, 2, 33–40. [Google Scholar]
- Visvalingam, M.; Whyatt, J.D. Line generalization by repeated elimination of points. In Landmarks in Mapping; Routledge: London, UK, 2017; pp. 144–155. [Google Scholar]
- Willems, N.; Van De Wetering, H.; Van Wijk, J.J. Visualization of vessel movements. In Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2009; Volume 28, pp. 959–966. [Google Scholar]
- Etienne, L.; Devogele, T.; Bouju, A. Spatio-temporal trajectory analysis of mobile objects following the same itinerary. Adv. Geo-Spat. Inf. Sci. 2012, 10, 47–57. [Google Scholar]
- Muckell, J.; Olsen, P.W.; Hwang, J.H.; Lawson, C.T.; Ravi, S. Compression of trajectory data: A comprehensive evaluation and new approach. GeoInformatica 2014, 18, 435–460. [Google Scholar] [CrossRef]
- Li, Y.; Liu, R.W.; Liu, J.; Huang, Y.; Hu, B.; Wang, K. Trajectory compression-guided visualization of spatio-temporal AIS vessel density. In Proceedings of the 2016 8th International Conference on Wireless Communications & Signal Processing (WCSP), Yangzhou, China, 13–15 October 2016; pp. 1–5. [Google Scholar]
- Singh, A.K.; Aggarwal, V.; Saxena, P.; Prakash, O. Performance analysis of trajectory compression algorithms on marine surveillance data. In Proceedings of the 2017 International Conference on Advances in Computing, Communications and Informatics (ICACCI), Udupi, India, 13–16 September 2017; pp. 1074–1079. [Google Scholar]
- Zhang, S.k.; Shi, G.y.; Liu, Z.j.; Zhao, Z.w.; Wu, Z.l. Data-driven based automatic maritime routing from massive AIS trajectories in the face of disparity. Ocean Eng. 2018, 155, 240–250. [Google Scholar] [CrossRef]
- Zhao, L.; Shi, G. A method for simplifying ship trajectory based on improved Douglas–Peucker algorithm. Ocean Eng. 2018, 166, 37–46. [Google Scholar] [CrossRef]
- Huang, Y.; Li, Y.; Zhang, Z.; Liu, R.W. GPU-accelerated compression and visualization of large-scale vessel trajectories in maritime IoT industries. IEEE Internet Things J. 2020, 7, 10794–10812. [Google Scholar] [CrossRef]
- Wei, Z.; Xie, X.; Zhang, X. AIS trajectory simplification algorithm considering ship behaviours. Ocean Eng. 2020, 216, 108086. [Google Scholar] [CrossRef]
- Liu, J.; Li, H.; Yang, Z.; Wu, K.; Liu, Y.; Liu, R.W. Adaptive douglas-peucker algorithm with automatic thresholding for AIS-based vessel trajectory compression. IEEE Access 2019, 7, 150677–150692. [Google Scholar] [CrossRef]
- Tang, C.; Wang, H.; Zhao, J.; Tang, Y.; Yan, H.; Xiao, Y. A method for compressing AIS trajectory data based on the adaptive-threshold Douglas-Peucker algorithm. Ocean Eng. 2021, 232, 109041. [Google Scholar] [CrossRef]
- Ji, Y.; Qi, L.; Balling, R. A dynamic adaptive grating algorithm for AIS-based ship trajectory compression. J. Navig. 2022, 75, 213–229. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Yap, P. Grid-based path-finding. In Conference of the Canadian Society for Computational Studies of Intelligence; Springer: Berlin/Heidelberg, Germany, 2002; pp. 44–55. [Google Scholar]
- Zhang, Y.; Zhang, A.; Gao, M.; Liang, Y. Research on Three-Dimensional Electronic Navigation Chart Hybrid Spatial Index Structure Based on Quadtree and R-Tree. ISPRS Int. J. Geo-Inf. 2022, 11, 319. [Google Scholar] [CrossRef]
- Yahja, A.; Stentz, A.; Singh, S.; Brumitt, B.L. Framed-quadtree path planning for mobile robots operating in sparse environments. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation (Cat. No. 98CH36146), Leuven, Belgium, 20–22 May 1998; Volume 1, pp. 650–655. [Google Scholar]
- Brondani, J.R.; de Lima Silva, L.A.; Zacarias, E.; de Freitas, E.P. Pathfinding in hierarchical representation of large realistic virtual terrains for simulation systems. Expert Syst. Appl. 2019, 138, 112812. [Google Scholar] [CrossRef]
- Shah, B.C.; Gupta, S.K. Speeding up A* search on visibility graphs defined over quadtrees to enable long distance path planning for unmanned surface vehicles. In Proceedings of the Twenty-Sixth International Conference on Automated Planning and Scheduling, London, UK, 12–17 June 2016. [Google Scholar]
- Thomas, M.; Geiger, C.; Kambhamettu, C. High Resolution Motion Estimation of Sea Ice Using an Implicit Quad-Tree Approach. ISPRS Workshop on High-Resolution Earth Imaging for Geospatial Information. Citeseer. 2007. Available online: https://www.isprs.org/proceedings/XXXVI/1-W51/paper/Thomas_geiger_kambha.pdf (accessed on 10 September 2022).
- Lee, W.; Choi, G.H.; Kim, T.W. Visibility graph-based path-planning algorithm with quadtree representation. Appl. Ocean Res. 2021, 117, 102887. [Google Scholar] [CrossRef]
- Bielak, J.; Ghattas, O.; Kim, E. Parallel octree-based finite element method for large-scale earthquake ground motion simulation. Comput. Modeling Eng. Sci. 2005, 10, 99. [Google Scholar]
- Liang, M.I.; Ramaswamy, B.; Patterson, C.C.; McKelvey, M.T.; Gordillo, G.; Nuovo, G.J.; Carson, W.E. Giant breast tumors: Surgical management of phyllodes tumors, potential for reconstructive surgery and a review of literature. World J. Surg. Oncol. 2008, 6, 117. [Google Scholar] [CrossRef]
- Popinet, S. Quadtree-adaptive tsunami modelling. Ocean. Dyn. 2011, 61, 1261–1285. [Google Scholar] [CrossRef]
- Zhou, C.; Chen, Z.; Li, M. A parallel method to accelerate spatial operations involving polygon intersections. Int. J. Geogr. Inf. Sci. 2018, 32, 2402–2426. [Google Scholar] [CrossRef]
- Hjaltason, G.R.; Samet, H. Speeding up construction of PMR quadtree-based spatial indexes. VLDB J. 2002, 11, 109–137. [Google Scholar] [CrossRef]
- Baselga, S.; Martínez-Llario, J.C. Intersection and point-to-line solutions for geodesics on the ellipsoid. Studia Geophys. Geod. 2018, 62, 353–363. [Google Scholar] [CrossRef]
- Pietrzykowski, Z.; Wielgosz, M. Effective ship domain–Impact of ship size and speed. Ocean Eng. 2021, 219, 108423. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | The Number of Nodes | Minimum Node Size (km) | The Number of Edge Comparisons |
|---|---|---|---|
| Quadtree | 55,534 | 0.407 | 95 |
| Uniform (256 × 256) | 65,536 | 1.629 | 2534 |
| Uniform (512 × 512) | 262,144 | 0.814 | 355 |
| Uniform (1024 × 1024) | 1,048,576 | 0.407 | 95 |
| ODP Algorithm | DP Algorithm | |||||
|---|---|---|---|---|---|---|
| (km) | Length Loss (%) | Compression Rate (%) | Number of Violations | Length Loss (%) | Compression Rate (%) | Number of Violations |
| None | 100.0 | 100.0 | - | 100.0 | 100.0 | - |
| 0.1 | 99.62 | 97.85 | 0 | 99.62 | 97.85 | 0 |
| 0.3 | 99.49 | 98.88 | 0 | 99.49 | 98.88 | 0 |
| 0.5 | 99.43 | 99.17 | 0 | 99.18 | 99.21 | 1 |
| 0.7 | 99.26 | 99.38 | 0 | 99.01 | 99.42 | 1 |
| 1.0 | 99.26 | 99.38 | 0 | 98.92 | 99.46 | 2 |
| ODP Algorithm | DP Algorithm | |||||
|---|---|---|---|---|---|---|
| (km) | Length Loss (%) | Compression Rate (%) | Number of Violations | Length Loss (%) | Compression Rate (%) | Number of Violations |
| None | 100.0 | 100.0 | - | 100.0 | 100.0 | - |
| 0.1 | 99.61 | 98.03 | 0 | 99.61 | 98.03 | 0 |
| 0.3 | 99.49 | 98.97 | 0 | 99.49 | 98.98 | 0 |
| 0.5 | 99.44 | 99.14 | 0 | 99.44 | 99.16 | 1 |
| 0.7 | 99.33 | 99.32 | 0 | 99.3 | 99.36 | 1 |
| 1.0 | 99.26 | 99.39 | 0 | 96.85 | 99.51 | 2 |
| DP | Wei et al. [46] | ODP | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Trajectory | Length Loss (%) | Compression Rate (%) | Number of Violations | Length Loss (%) | Compression Rate (%) | Number of Violations | Length Loss (%) | Compression Rate (%) | Number of Violations |
| 1 | 0.74 | 99.48 | 1 | 1.04 | 98.77 | 3 | 0.72 | 99.47 | 0 |
| 2 | 0.71 | 99.62 | 1 | 0.67 | 98.73 | 1 | 0.46 | 99.60 | 0 |
| 3 | 0.98 | 99.61 | 1 | 0.45 | 98.83 | 1 | 0.56 | 99.59 | 0 |
| 4 | 1.08 | 99.46 | 2 | 1.13 | 98.35 | 2 | 0.74 | 99.38 | 0 |
| 5 | 0.40 | 99.56 | 1 | 0.48 | 98.79 | 1 | 0.37 | 99.55 | 0 |
| 6 | 0.58 | 99.51 | 1 | 0.60 | 97.65 | 1 | 0.55 | 99.48 | 0 |
| 7 | 0.46 | 99.50 | 1 | 0.55 | 98.43 | 2 | 0.45 | 99.48 | 0 |
| 8 | 0.38 | 99.57 | 2 | 0.45 | 99.12 | 1 | 0.36 | 99.55 | 0 |
| 9 | 0.64 | 99.51 | 1 | 0.79 | 99.01 | 1 | 0.61 | 99.48 | 0 |
| 10 | 3.15 | 99.51 | 5 | 0.58 | 98.42 | 2 | 0.74 | 99.39 | 0 |
| (km) | ODP with PMR Quadtree | ODP without PMR Quadtree | Ratio (%) (with/without) |
|---|---|---|---|
| 0.1 | 6.4 | 169.3 | 3.78 |
| 0.2 | 6.2 | 115.1 | 5.39 |
| 0.3 | 5.8 | 87.1 | 6.66 |
| 0.4 | 5.6 | 75.1 | 7.46 |
| 0.5 | 5.4 | 66.6 | 8.11 |
| 0.6 | 5.2 | 59.5 | 8.74 |
| 0.7 | 5.2 | 55.2 | 9.42 |
| 0.8 | 5.0 | 50.4 | 9.92 |
| 0.9 | 5.0 | 45.8 | 10.92 |
| 1.0 | 4.9 | 43.8 | 11.19 |
| (km) | ODP with PMR Quadtree | ODP without PMR Quadtree | Ratio (%) (with/without) |
|---|---|---|---|
| 0.1 | 6.9 | 180.1 | 3.83 |
| 0.2 | 6.4 | 127.7 | 5.01 |
| 0.3 | 6.0 | 99.4 | 6.04 |
| 0.4 | 5.8 | 78.6 | 7.38 |
| 0.5 | 6.0 | 68.3 | 8.78 |
| 0.6 | 5.4 | 62 | 8.71 |
| 0.7 | 5.6 | 55.7 | 10.05 |
| 0.8 | 5.2 | 51.6 | 10.08 |
| 0.9 | 5.0 | 47.4 | 10.55 |
| 1.0 | 5.1 | 46.1 | 11.06 |
| (km) | ODP with PMR Quadtree | ODP without PMR Quadtree | Ratio (%) (with/without) |
|---|---|---|---|
| 0.1 | 6.7 | 174.2 | 3.85 |
| 0.2 | 6.2 | 118 | 5.25 |
| 0.3 | 5.8 | 89.8 | 6.46 |
| 0.4 | 5.6 | 76.1 | 7.36 |
| 0.5 | 5.4 | 66.3 | 8.14 |
| 0.6 | 5.2 | 59.7 | 8.71 |
| 0.7 | 5.2 | 55.8 | 9.32 |
| 0.8 | 5.1 | 51.3 | 9.94 |
| 0.9 | 4.9 | 45.4 | 10.79 |
| 1.0 | 4.9 | 43.4 | 11.29 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, W.; Cho, S.-W. AIS Trajectories Simplification Algorithm Considering Topographic Information. Sensors 2022, 22, 7036. https://doi.org/10.3390/s22187036
Lee W, Cho S-W. AIS Trajectories Simplification Algorithm Considering Topographic Information. Sensors. 2022; 22(18):7036. https://doi.org/10.3390/s22187036
Chicago/Turabian StyleLee, Wonhee, and Sung-Won Cho. 2022. "AIS Trajectories Simplification Algorithm Considering Topographic Information" Sensors 22, no. 18: 7036. https://doi.org/10.3390/s22187036
APA StyleLee, W., & Cho, S.-W. (2022). AIS Trajectories Simplification Algorithm Considering Topographic Information. Sensors, 22(18), 7036. https://doi.org/10.3390/s22187036