1. Introduction
The Internet of Things (IoT) concept is expected to fulfil demands in the use of smart systems. Mainly, IoT is a network of interconnected devices equipped with tiny sensors. As communication between the devices as well as the users is enabled with the help of the Internet, it becomes possible to develop several intelligent applications for healthcare, automotive, and many other industries. Thus, it enables people to utilize such applications in order to facilitate the activities of daily life. However, the development of IoT technology presents a challenging issue due to the diversity of these applications. Particularly, when a growing interest in building IoT-based smart cities is regarded, it is necessary to consider common requirements of IoT devices such as low cost, low power consumption, and wide coverage for typical smart city applications [
1]. In order to satisfy these requirements, several communication technologies such as 6LoWPAN [
2], Wi-Fi [
3,
4], BLE [
5], and ZigBee [
6,
7] have already been developed. However, the main concern of these technologies is the limitation of network coverage. For this reason, they are commonly preferred for indoor applications. To improve network coverage, Low-Power Wide Area Network (LPWAN) technologies such as SigFox, NB-IoT, Ingenu, and LoRa have been designed and implemented in the commercial market [
8]. Alternatively, IQRF is a promising technology that provides efficient solutions in the field of IoT. Hence, as discussed in [
9] several studies considering the use of IQRF in IoT applications have been recently presented in the literature [
10,
11,
12,
13,
14,
15,
16,
17,
18,
19].
A network based on IQRF in urban areas requires an accurate prediction of network coverage. Therefore, in order to design such networks, any propagation impairments affecting the propagation links using actual IQRF transceivers (TRs) need to be analyzed comprehensively. In this context, the most significant impairment could be assigned to path loss. Obviously, it provides useful information about variations in the received signal power with respect to the distance between transceivers, link budget, and the corresponding signal-to-noise ratio. Theoretically, path loss is highly affected by the environmental conditions. Thus, it is evident that the real-world deployment of IQRF networks requires efficient path loss modelling. Moreover, the characteristics of IQRF links in urban environments have thus far not been thoroughly studied in the existing literature. More specifically, empirical path loss models have not been proposed for the deployment of IQRF wireless networks. In addition, most works that have centered on the characteristics of wireless links in urban environments, have used a transmitter or base station at high elevation, and a receiver or mobile station at lower elevation in the measurements. However, these studies do not apply to IQRF applications in which a mesh network in an urban environment can be formed between sensors at a similar height from the ground.
In the related works, very few studies that deal with the propagation aspects of IQRF networks have been presented in [
20,
21,
22]. In [
20], real measurements and simulations of the Received Signal Strength Indicator (RSSI) are performed in three main scenarios: indoor, open-space outdoor and urban-area outdoor. In the same work, the simulated RSSI values are compared with the real performed measurements in order to demonstrate the IQRF network range perfomance. Similarly, in [
21], RSSI values of an IQRF network with nodes placed at different locations of a multi-floor building (indoor) are measured. However, no changes in the distance are conducted. Rather, only the transmission power is set to different levels. The obtained results demonstrate to what extent the IQRF network is stable when the maximum transmission power is used. Another study in [
22], presents the possibilities for deploying a low-power mesh network in an indoor environment using IQRF technology. In this work, RSSI is also measured for three receiving nodes and compared with the sensitivity level that each receiving node allows. Therefore, motivated from the aforementioned discussions, it is evident that there has been no published work on propagation modelling for the deployment of IQRF networks in urban environments.
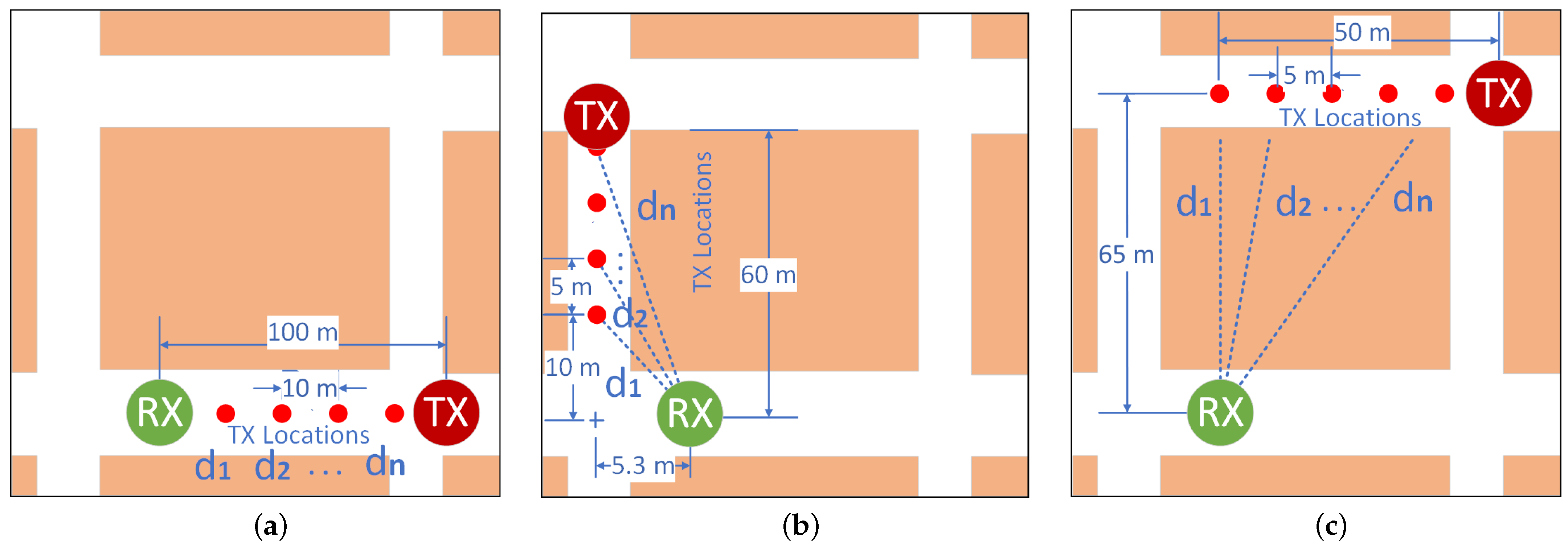
Major contributions of this article include preliminary propagation measurements to be used in the construction of an IQRF network in a urban environment. Moreover, the aim is to evaluate the performance of empirical path loss models in a low-height Peer-to-Peer (P2P) configured system. To this end, firstly, measurement campaigns are performed in an urban environment by utilizing two types of IQRF transceivers operating in the 868 MHz band. In the measurements, IQRF transceivers are intended to be used as IoT devices that could be connected either at the same street in Line-of-Sight (LoS) link, two perpendicular streets in Non-Line-of-Sight (NLoS) with one single knife-edge link (one turn), or two parallel streets in NLoS with double knife-edge link (two turns). Then, the measurement results are compared with well-known empirical path loss models. Notably, although there are an abundance of measurement-based models to statistically characterize the wireless channels, our purpose is to show that which well-known empirical path loss models can be used in the construction of IQRF networks in urban environments. According to the comparison results achieved from various measurement scenarios, the empirical path loss models with higher prediction accuracy are proposed for usage in the efficient deployment of IQRF networks in an urban environment. To the best of our knowledge, no such work in the existing literature has put forth such a claim.
The structure of this article is organized as follows. In
Section 2, an overview of IQRF technology is presented.
Section 3 presents well-known empirical path loss models for the deployment of Wireless Sensor Networks (WSNs) in urban environments. The field measurements along with the experimental setup are described in
Section 4. Next, measurement results and data analysis are provided in
Section 5. Finally, concluding remarks are provided in
Section 6.
5. Results, Analysis and Discussion
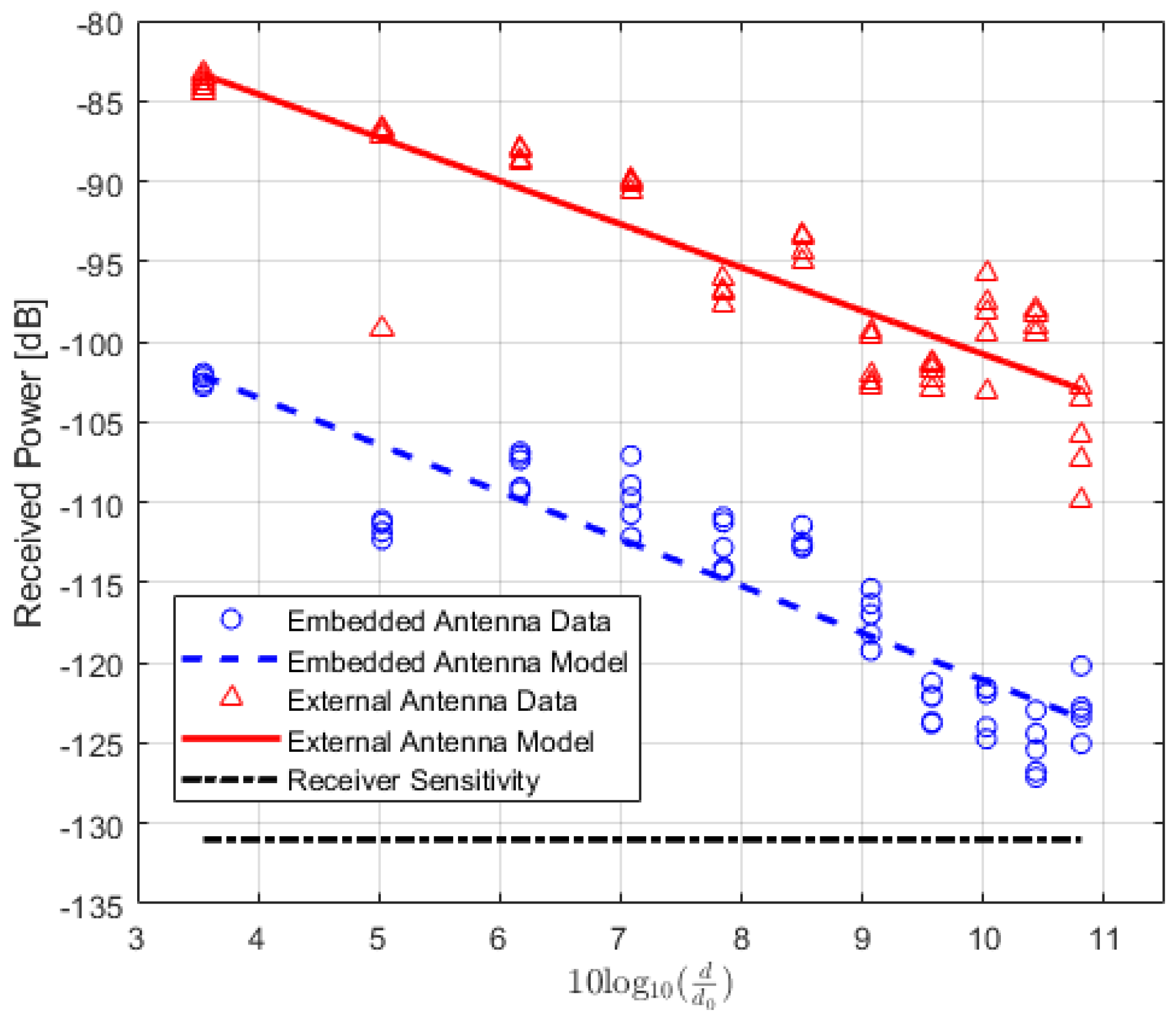
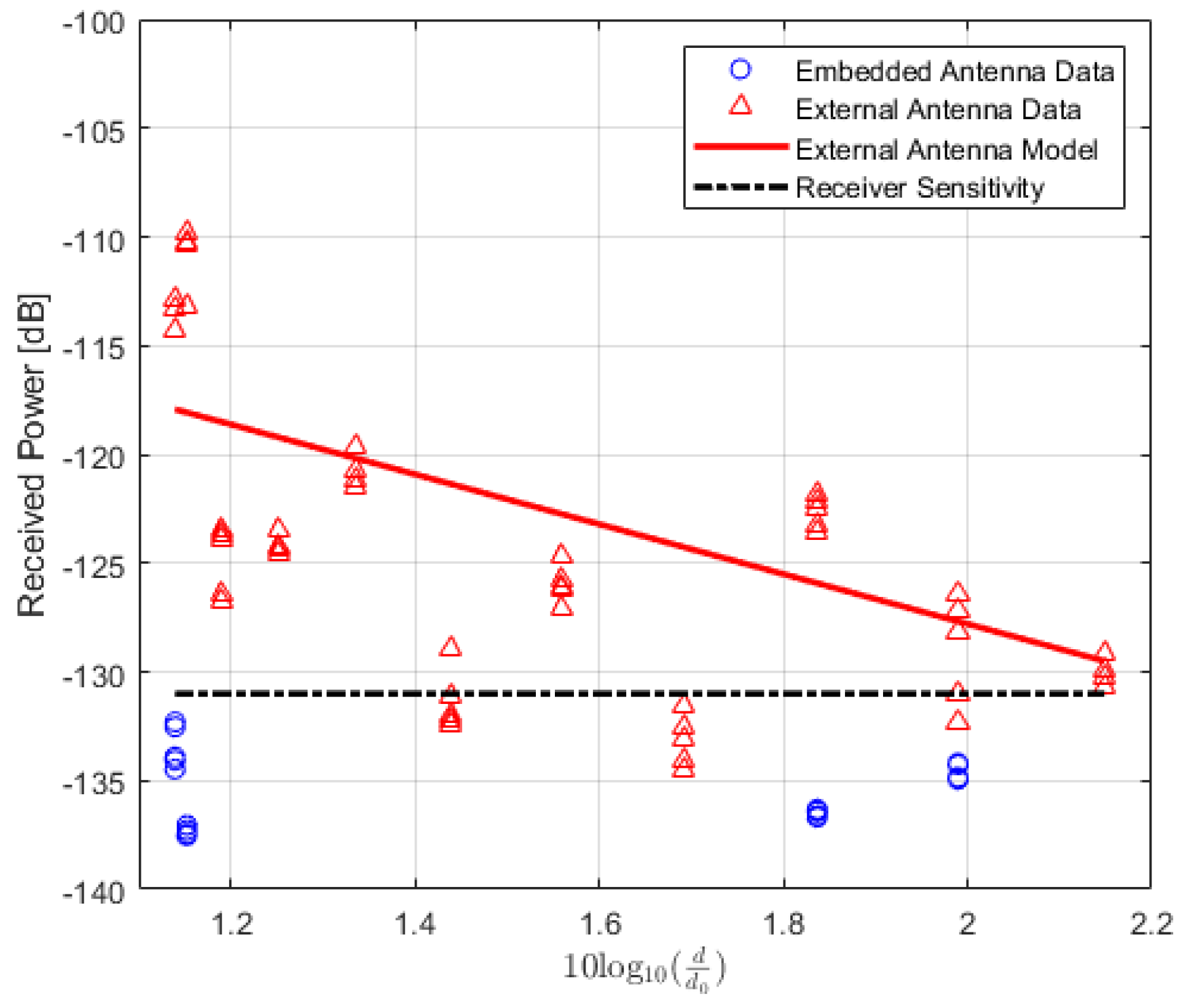
The values of the received power or RSSI are recorded and their averages are calculated. In addition, the Packet Delivery Ratio (PDR) is also calculated to analyze the results. PDR is a well-known performance metric that is mostly used in order to analyze the wireless or IoT network performance [
42,
43]. It provides the relation between the total numbers of packets which are successfully delivered and the total numbers of transmitted packets. For the received power values of the locations where the total number of successfully received packets is lower than
, the data are not included in the path loss calculation. The averaged received power values at each location of TRs using either embedded or external antenna with the corresponding PDR values for LoS, NLoS one-turn and NLoS two-turns links are given in
Table 3,
Table 4 and
Table 5, respectively. Corresponding plots with data fitting models are shown in
Figure 5,
Figure 6 and
Figure 7, respectively.
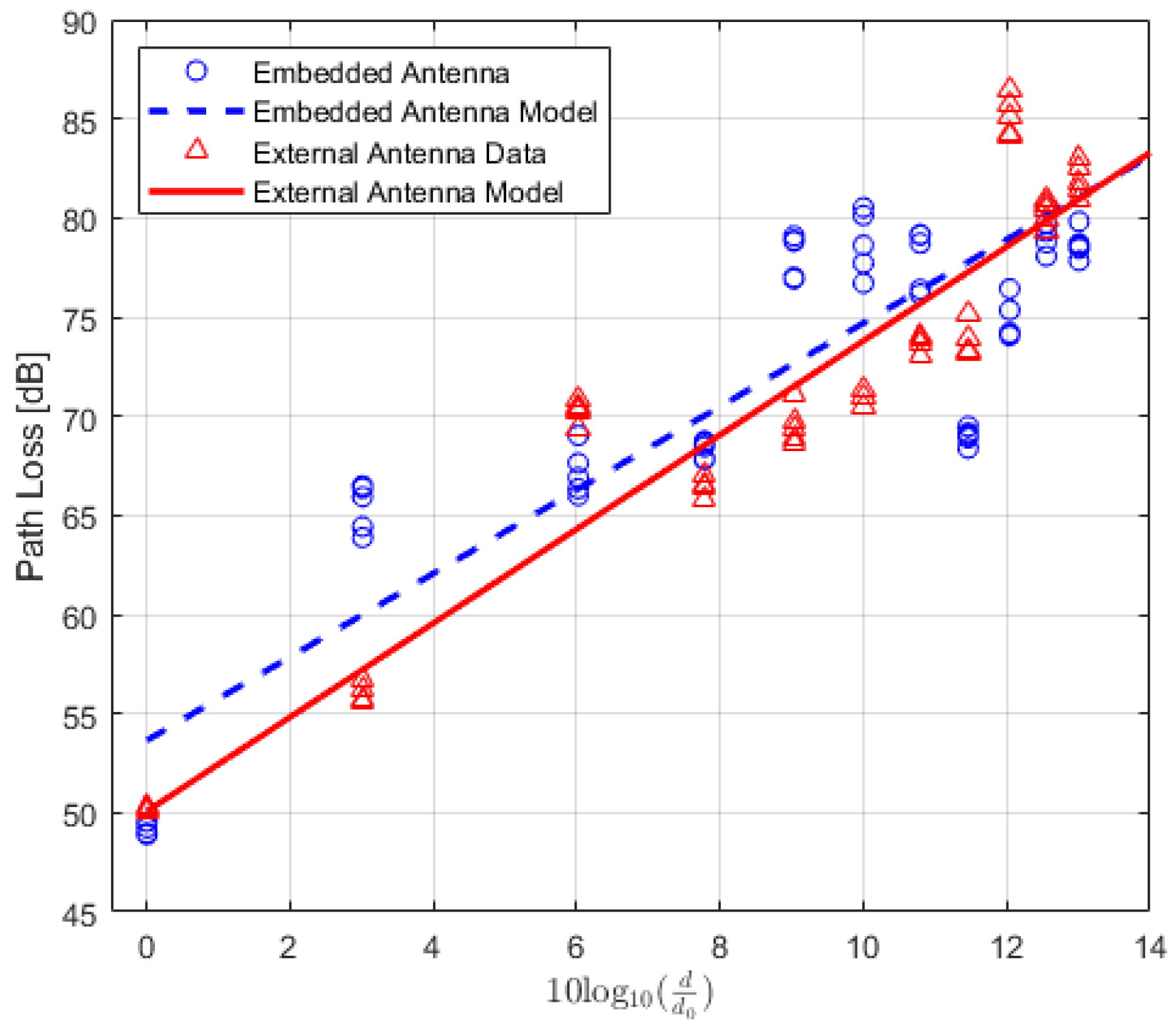
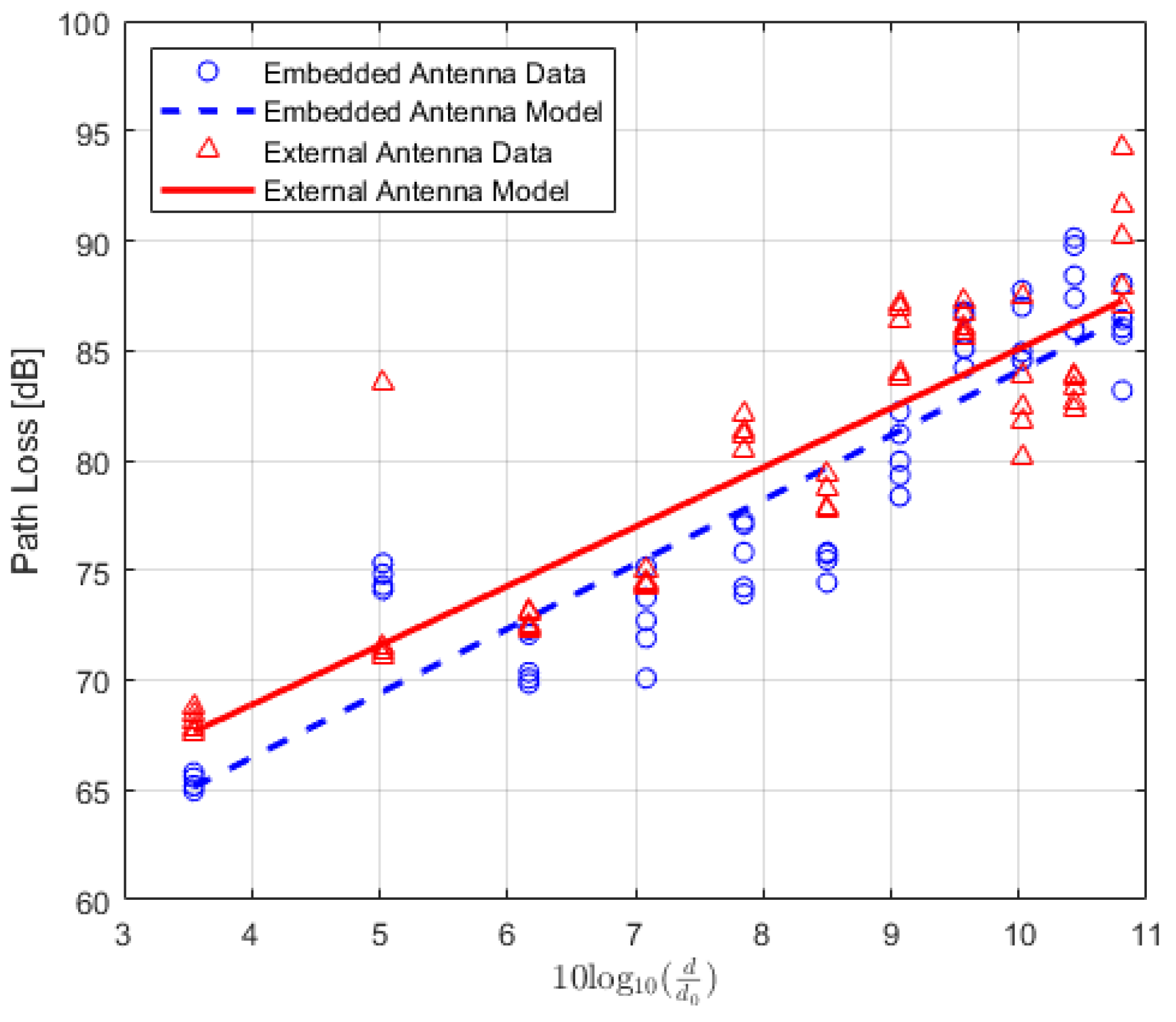
On the other hand, the path loss
of (
2) is calculated by considering the gains of the antennas. The following equation is used to calculate the final path loss model for both types of TRs [
44].
All quantities are expressed in dB, where,
and
are the transmitted and received power, respectively. The
and
are the transmitter and receiver gains, respectively. Using (
2) and (
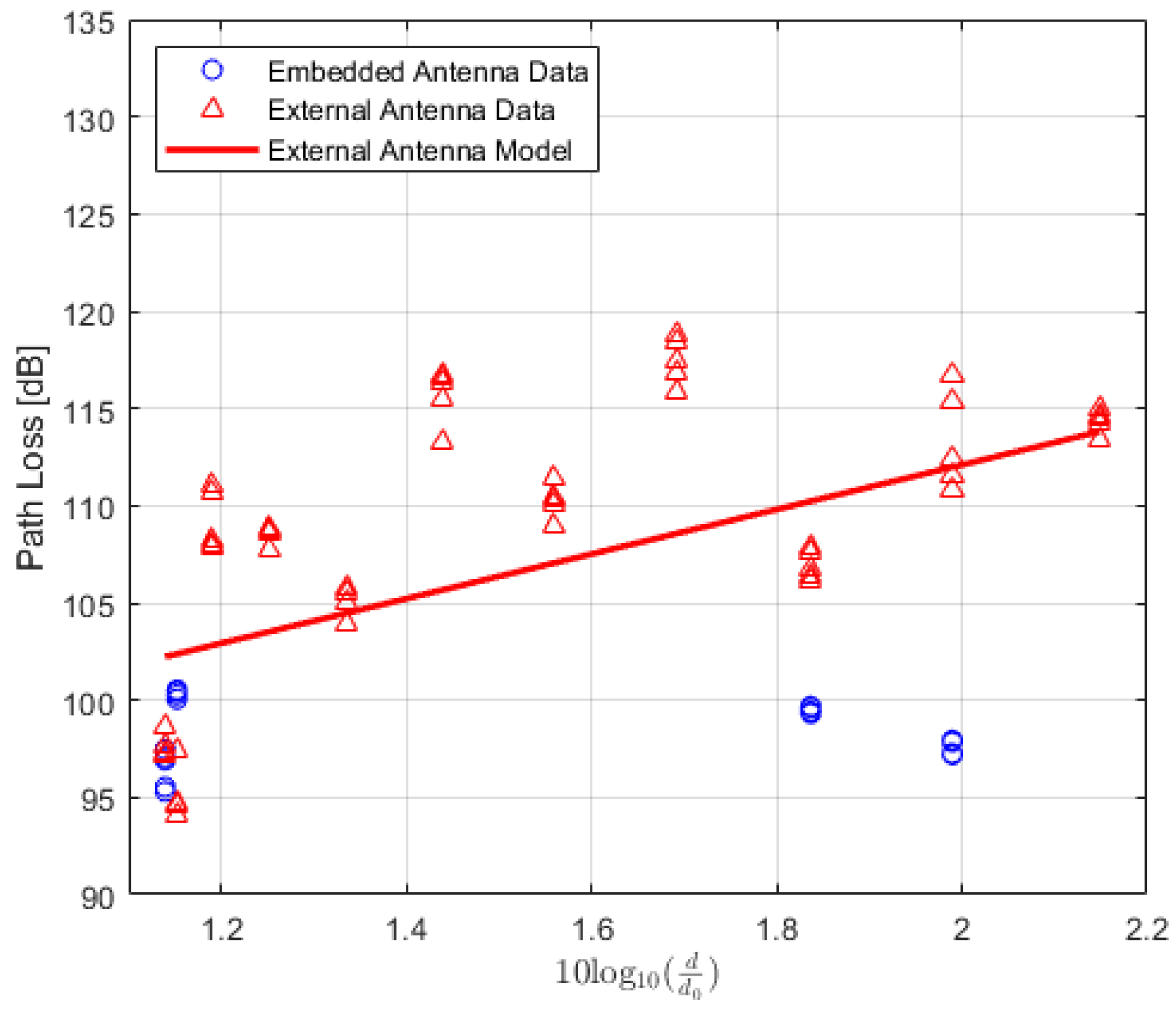
21), the path loss is calculated for both types of TRs and the data are modelled using polynomial curve fitting (in a least-squares sense). The average values of the calculated path loss models along with the corresponding PDR values for LoS, NLoS one-turn and NLoS two-turns links are presented in
Table 6,
Table 7 and
Table 8, respectively. The corresponding plots for the path loss models are shown in
Figure 8,
Figure 9 and
Figure 10. Moreover, path-loss linear regression parameters such as the path loss exponent
n, the losses
at a far-field reference distance
, the correlation factor between measured and predicted values represented by
, the standard deviation
, and finally the estimated range for LoS, NLoS one-turn and NLoS two-turns links are presented in
Table 9,
Table 10 and
Table 11, respectively.
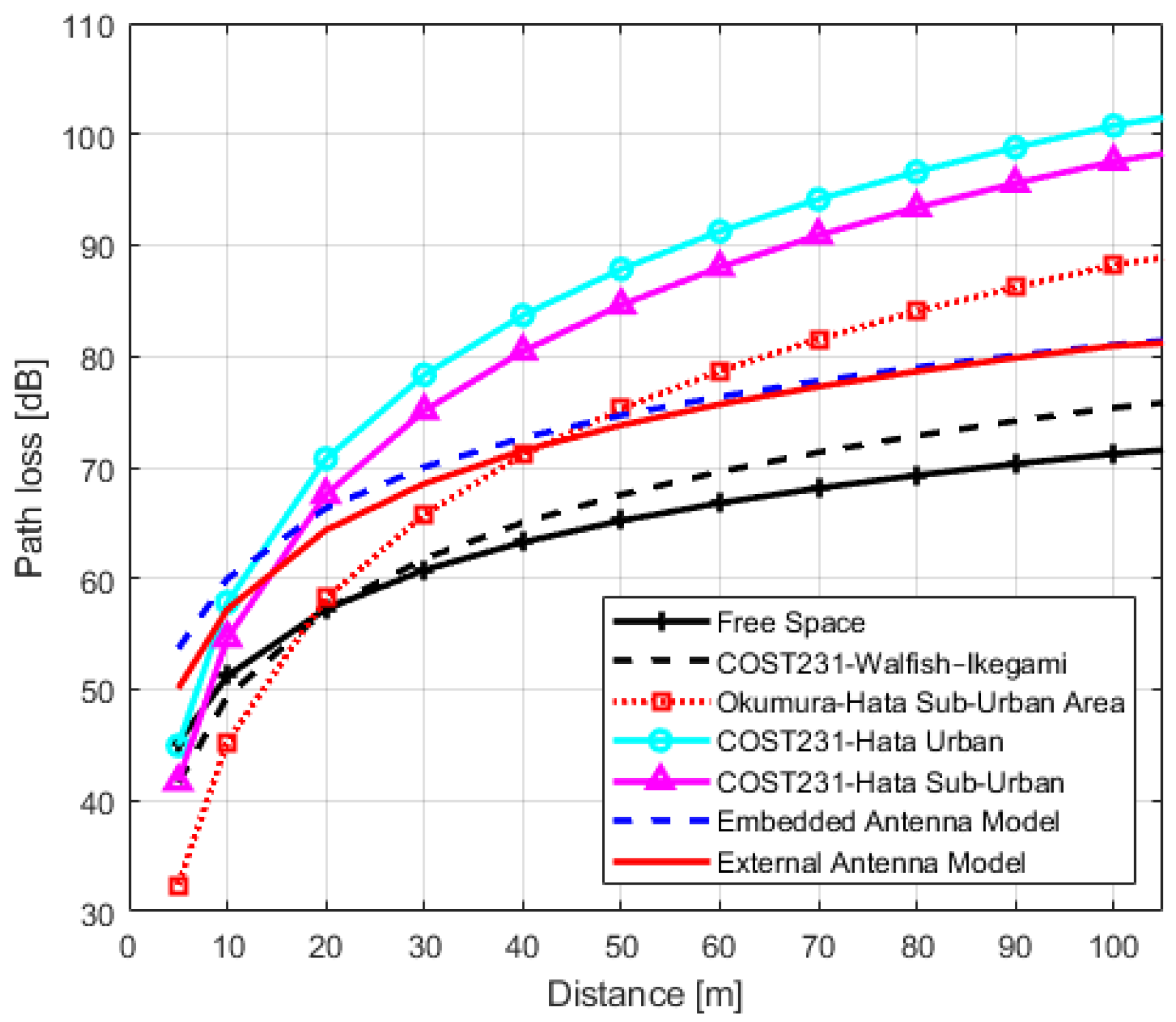
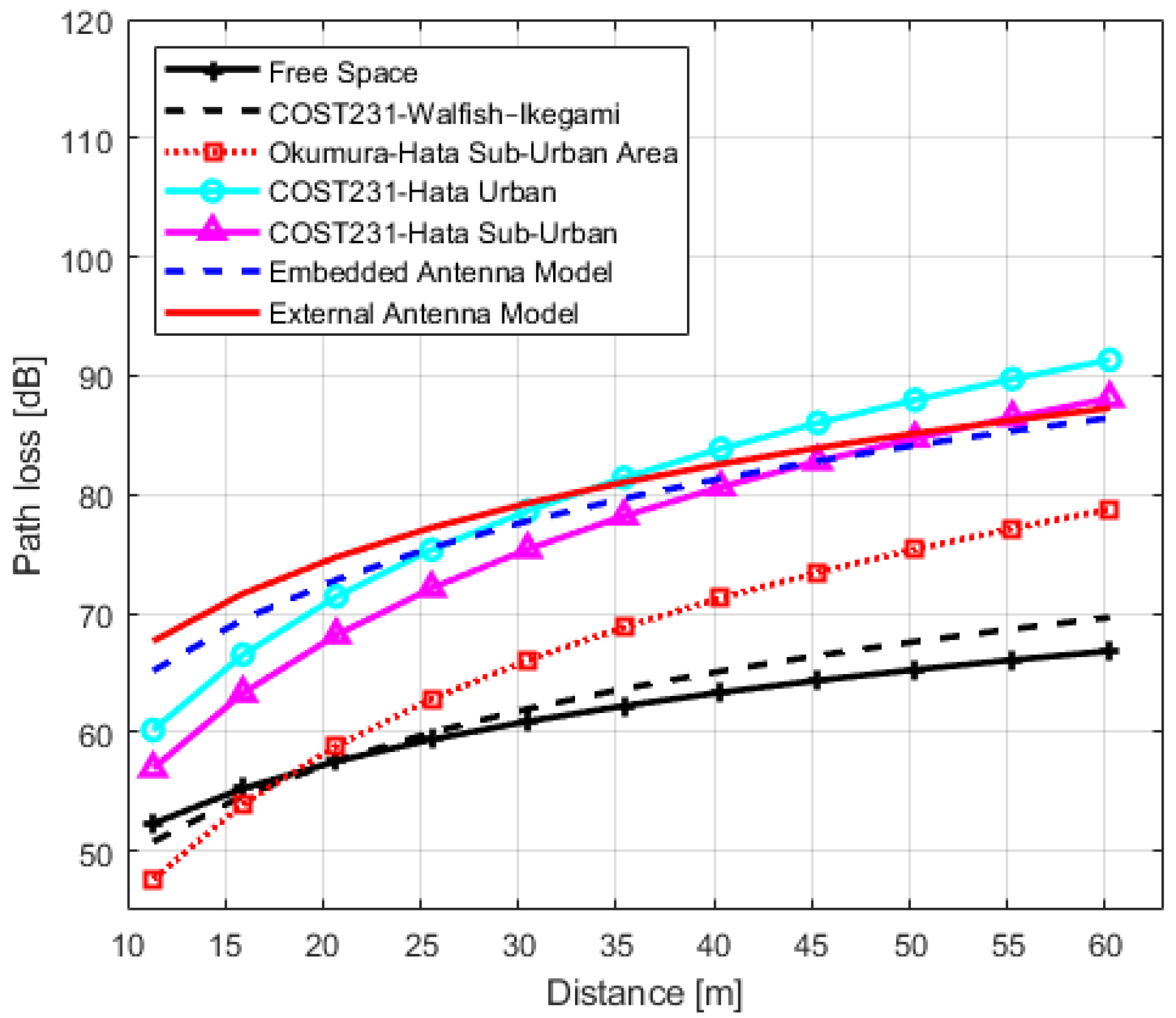
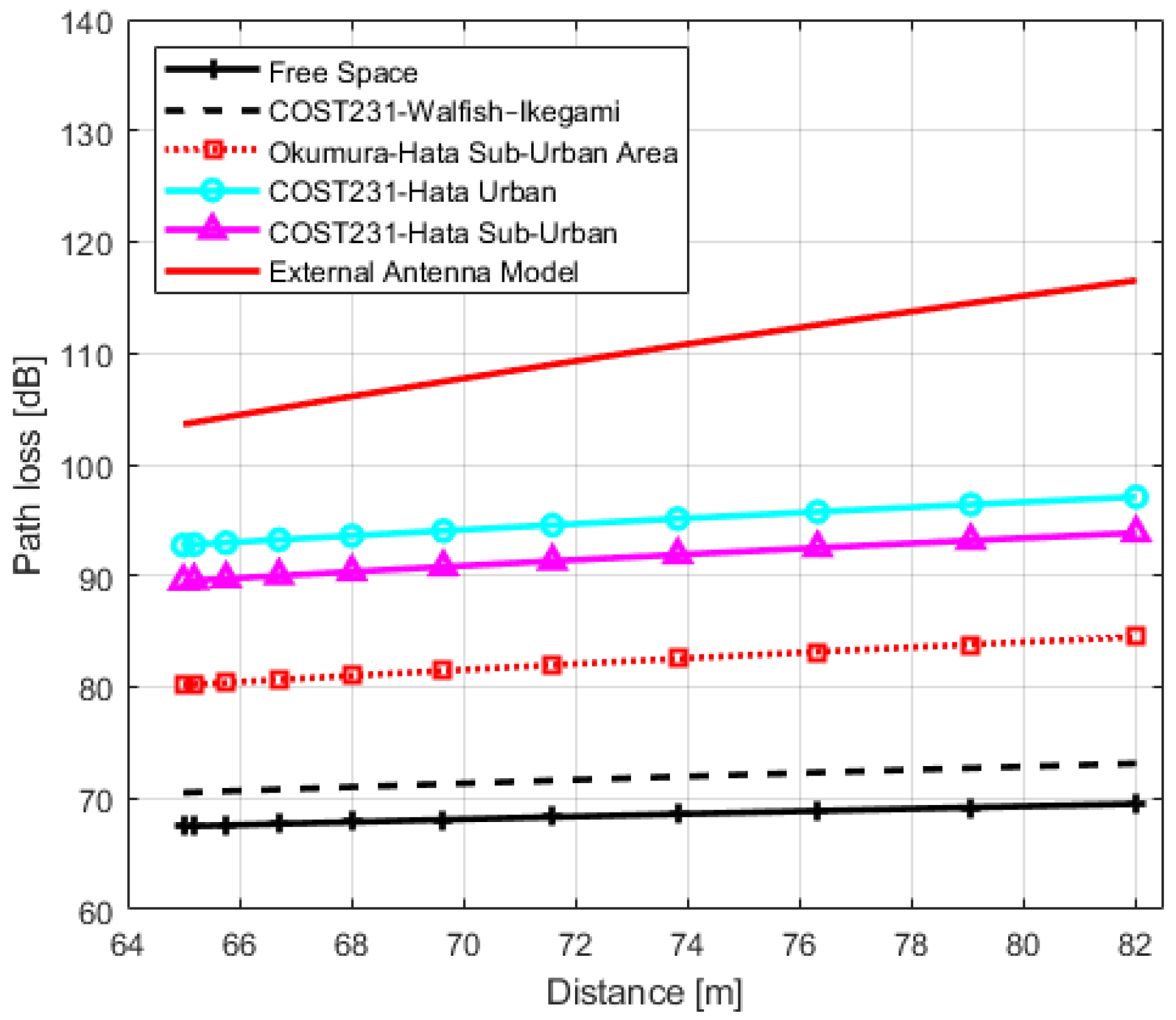
In order to analyze the accuracy of the obtained models and their usability in design, planning and management of IQRF wireless networks in urban environments, we compared IQRF models with the models of
Section 3. The graphs of IQRF path loss models for LoS, NLoS one-turn and NLoS two-turns links with models of
Section 3 are shown in
Figure 11,
Figure 12 and
Figure 13, respectively. The paramters used for plotting the obtained models are presented in
Table 6,
Table 7 and
Table 8, respectively. In order to compare these models with the models of
Section 3, the Root Mean Square Errors (RMSE) method is employed. The comparison results are presented in
Table 12.
For IQRF TRs with embedded antenna in the LoS scenario, the COST231 Walfisch–Ikegami model has better prediction accuracy with a minimal error of 9.00 dB when compared to other models. On the other hand, both the Okumura–Hata Suburban and Free-space models are also considered models with minimal errors of 10.33 dB and 10.44 dB, respectively. However, by comparing the models’ exponents, it can be seen from
Figure 11 that there is an important difference in the slope between the Okumura–Hata Suburban and IQRF model. Although the error is relatively minimal, the difference in slope with the Okumura–Hata Suburban model results in a larger deviation at lower and higher distances (locations). As a result, this model becomes inapplicable as an IQRF model for these type of scenarios.
Moreover, the exponent of the obtained IQRF model for TRs using embedded antenna in the same scenario is
, as presented in
Table 9. This value is closer to the free space model’s exponent. In addition, the intercept term difference is approximately 10 dB. The same discussion can be applied for COST231 Walfisch–Ikegami but reservedly with the slope value of this model. Hence, for IQRF network implementation in an urban environment using TRs with embedded antenna in an LoS link, Free-space and COST231 Walfisch–Ikegami (with bias to Free-space) models plus an intercept of 10 dB can be used.
For IQRF TRs with external antenna in the same scenario, the minimal errors of 8.03 dB, 8.10 dB and 10.16 dB are also obtained for the Okumura–Hata Suburban, COST231 Walfisch–Ikegami and Free-space models, respectively. Although the error is minimal for the Okumura–Hata Suburban model, there is a difference in slope of this model compared to the IQRF model resulting in the same important deviation at lower and higher distances. For similar reasons, this renders it inapplicable as an IQRF model. On the other hand, the exponent of the obtained IQRF model for these types of TRs is . In this case, it is closer to the COST231 Walfisch–Ikegami and Free-space exponents with an intercept term difference of approximately 10 dB, making these two models (with bias to COST231 Walfisch–Ikegami model) more efficient.
In the NLoS one-turn scenario, the best matches for TRs with embedded antenna can both be COST231-Hata for urban and suburban models with error values of 4.38 dB and 4.76 dB, respectively. This is also the case for TR with an external antenna with error values 4.72 dB and 5.94 dB, respectively. Finally, in the NLoS two-turns scenario, for a transceiver with an external antenna, the closest model that can be considered with a minimal error of 15.36 dB, is the COST231-Hata Model for urban areas, but reservedly since the goodness of fit measure for this case is relatively low, and the log-distance model is likely an unsuitable model in these types of scenarios.
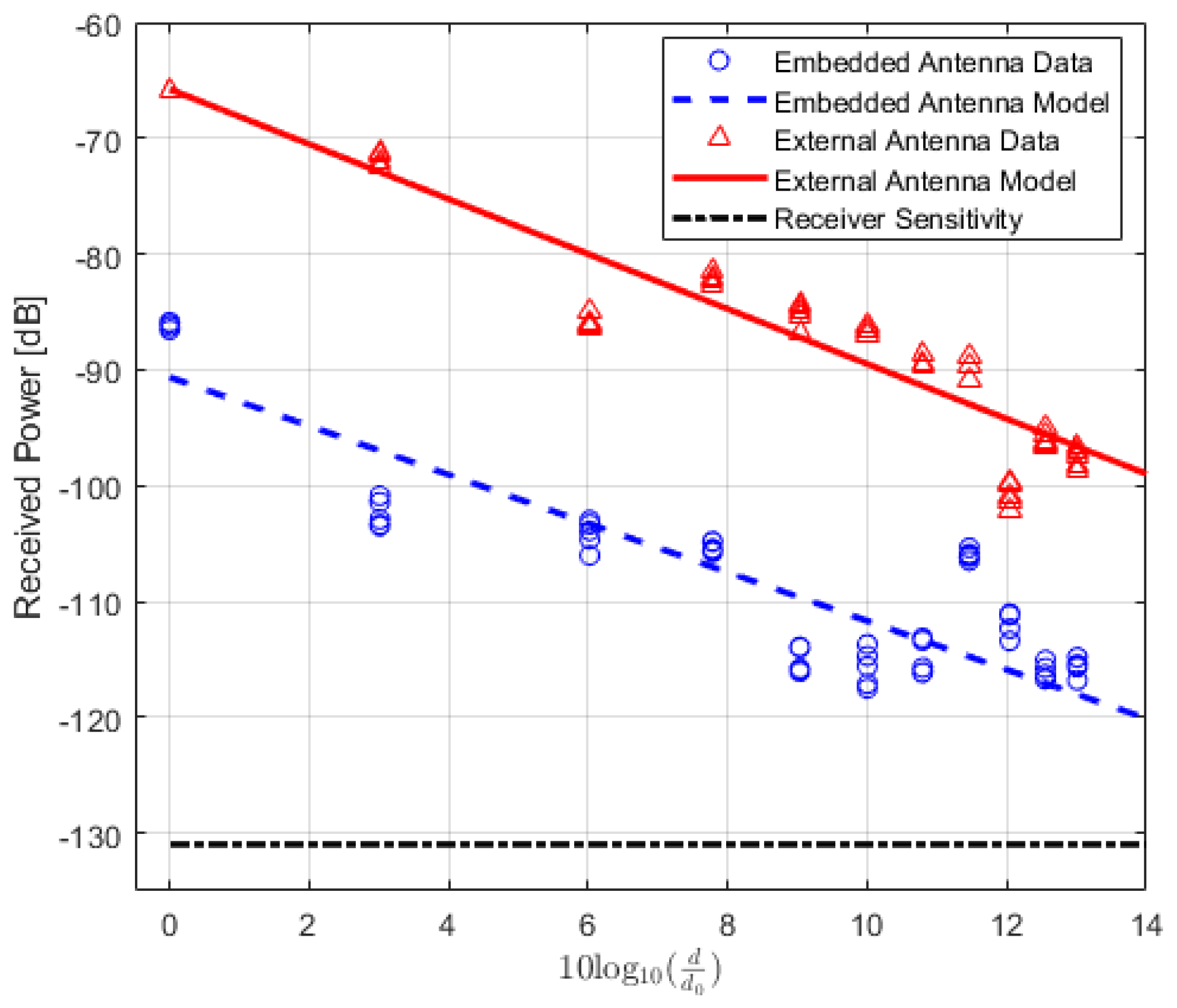
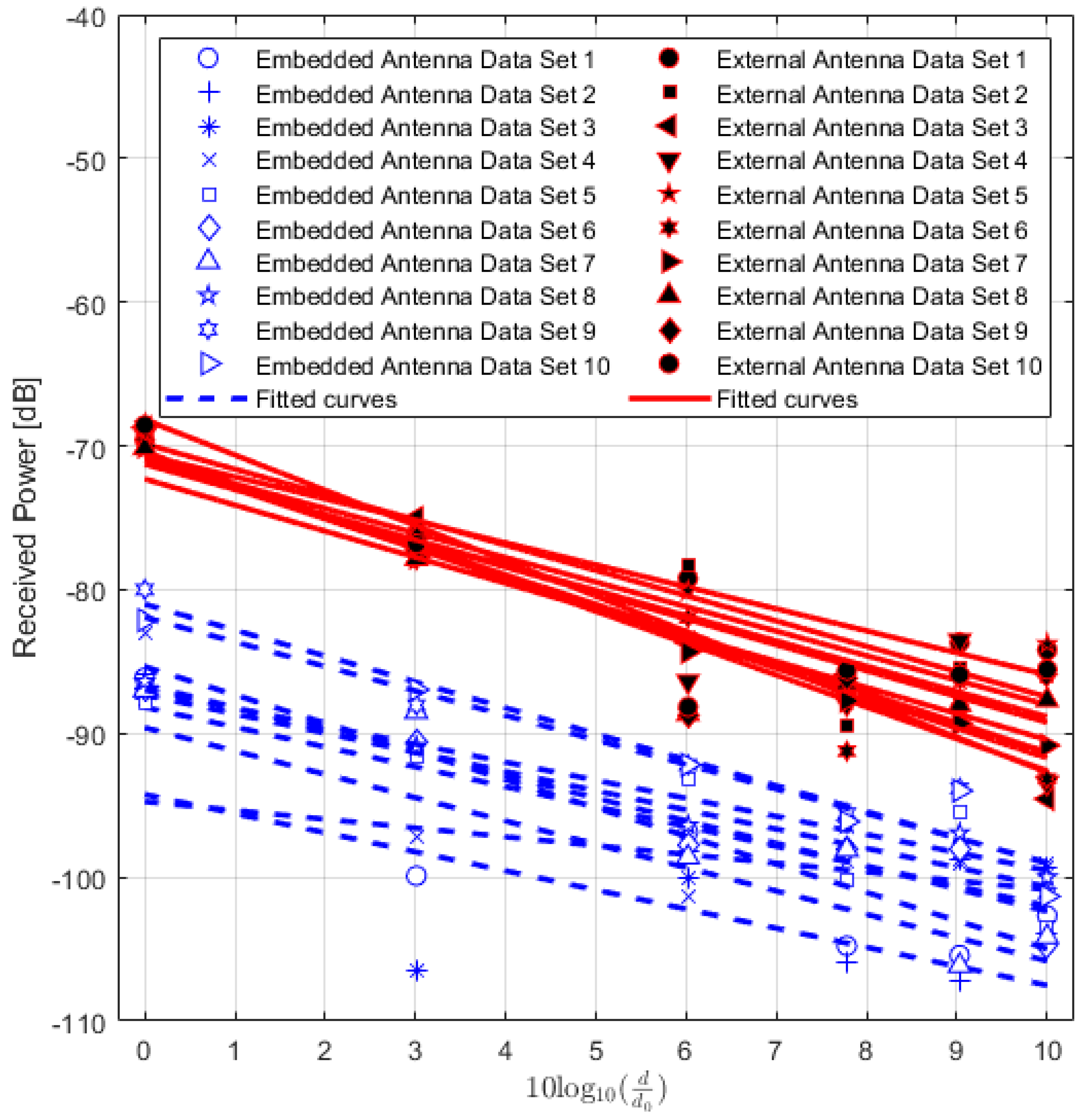
Furthermore, the performance of both types of IQRF TRs in terms of received power are compared. In this case, ten sets of measurements of the RSSI in an LoS environment in an open field (stadium) are conducted. Each set of data is comprises six measurements at six different locations 5, 10, 20, 30, 40 and 50 m from the fixed Rx stand. In order to keep the Tx stand at the same place, the locations are marked on the ground. Each set of data is modelled with one fitting curve. The results are shown in
Figure 14.
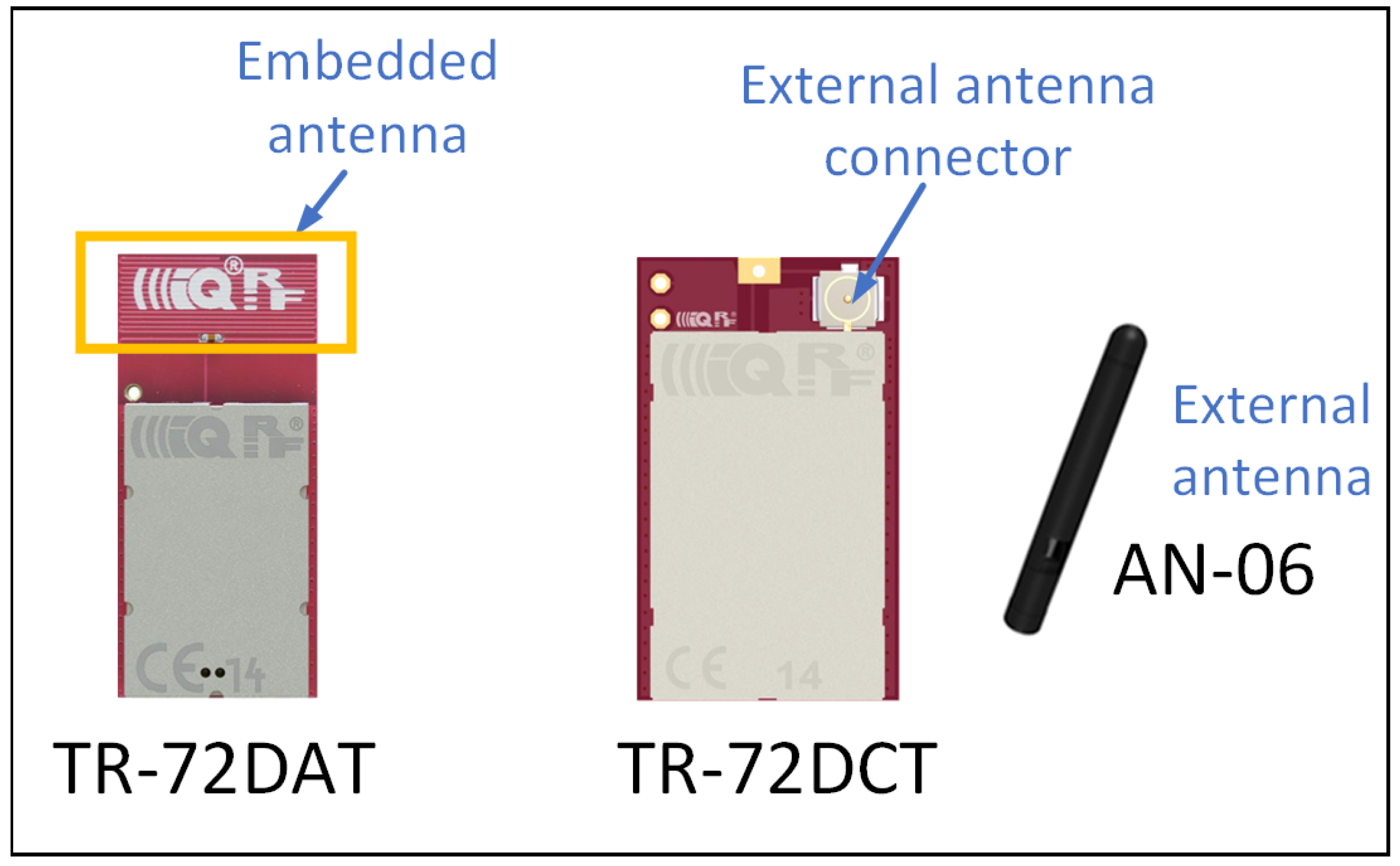
From the figure, it can be seen that the results show a larger spread of values for TRs with the embedded antenna (MLA) compared to TRs with the external antenna (SLDA). For TRs with embedded antenna, the spread is minimum, and the maximum average difference is about 15 dB. However, for TRs with external antenna, the minimum and maximum average differences are about 7 dB. Although similar measurements are conducted for both types of transceivers, TRs with embedded antenna are inconsistent. SLDA antennas are usually more efficient as the imaginary component of its complex input impedance is zero [
45]. Thus, this represents an important result for the practical use of IQRF. TRs with the embedded antenna seems to be much more sensitive to fading effects, possibly due to the coupling between the antenna and the nearby structure of the circuit board with the electronics and the casing. In addition, the average of its received power level is lower compared to that for the TRs with external antenna. The reason can be linked to the small embedded antenna gain (−8.5 dBi) [
29] causing the stochastic noise to exhibit a relatively larger effect. In other words, these results show that the use of IQRF TRs with an external antenna provides better and stable received power and less sensitivity to background noise when compared with TRs with embedded antenna. Hence, a stable IQRF network with longer ranges between nodes could be achieved.
Overall, it is worth mentioning that by using the obtained received power fitting models, the maximum range for IQRF TRs with embedded antenna in an urban environment in the LoS scenario is estimated to be 420 m as listed in
Table 9. As discussed in [
9] the theoretical range for these types of TRs is 1 km in an LoS setup assuming that there are no obstacles between Tx and Rx by using some sort of range extender. However, if TRs are used without the range extender, then the range shrinks in half (500 m) as mentioned in the IQRF technical documents [
29]. The comparison shows an 80-meter difference between the theoretical (technical) and the practical data. This is due to the fact that the TRs are installed in a more dense environment (urban). Additionally, in the NLoS one-turn scenario, the maximum range for these types of TRs is estimated to be 110 m. However, for the NLoS two-turns scenario, the maximum range is not presented as the models could not be calculated. This can give an indication about the range limitations of IQRF TRs (network) with embedded antennas in similar scenarios. On the other side, for TRs with an external antenna, the maximum range is larger. In the LoS scenario, it is estimated to be 2800 m. In this case, there are no technical data available about the maximum range using these types of TRs. Hence, the obtained range is not compared as in the case of TRs with an embedded antenna. Furthermore, in the NLoS one-turn scenario, the range is 660 m. Finally, for the NLoS two-turns scenario, the maximum range is around 90 m. Beyond these ranges, packets may start becoming lost.
As a summary,
Table 13 lists the achieved results from this study.
6. Conclusions and Future Work
In this paper, empirical path loss models of two types of IQRF transceivers are calculated through the measurement of received power in three different scenarios, LoS, NLoS one-turn and NLoS two-turns. IQRF obtained empirical path loss models were compared with other well-known models to analyze the accuracy of the achieved empirical IQRF models. To this end, the RMSE between the obtained IQRF models and other models was calculated. The results show that in an LoS environment the models that agree well with the IQRF model employing transceivers with embedded and external antennas are the free-space and COST231 Walfisch–Ikegami models, respectively, with an offset of approximately 10 dB. Moreover, for the NLoS one-turn environment, IQRF models for both types of transceivers agree well with two models: COST231-Hata for urban areas, and COST231-Hata for suburban areas. In the NLoS two-turns environment, for a transceiver with an external antenna, the closest model with minimal error is the COST231-Hata Model for urban areas. Furthermore, an IQRF transceiver with embedded antenna was shown to receive power below that of those with external antenna by approximately 20 dB, and was also shown to be more sensitive to fading effects, showing a fluctuation of about 10 dB more than transceivers with external antennas. Finally, maximum ranges of IQRF transceivers are also estimated.
The PDR values for locations (distances) in three scenarios are calculated. From the results, it is observed that the PDR changes inconsistently when increasing the distance. This comes from the fact that the reflected signals are constructed differently in different Tx placements (locations). Hence, longer ranges are required to observe the variation pattern of the PDR; however, this is outside the scope of this study and can be a part of future work.
Another important conclusion is that although IQRF technology can be an alternative to short- and long-range IoT technologies, it is clear that IQRF has a better coverage compared to short-range technologies. However, when compared with long-range technologies, the same range could be achieved using the multi-hops scheme. Nevertheless, to achieve more robust and reliable results regarding coverage in outdoor environments, another experimental study is planned to be implemented in the near future.

 ,
, 
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}