
An Improved Grey Wolf Optimization with Multi-Strategy Ensemble for Robot Path Planning


Abstract
:1. Introduction
2. Review of GWO
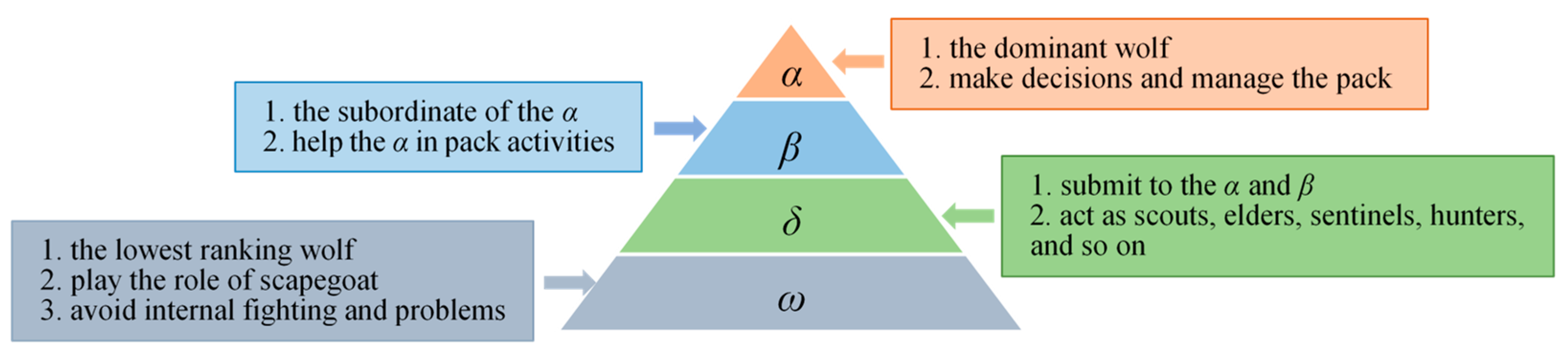
2.1. Leadership Hierarchy
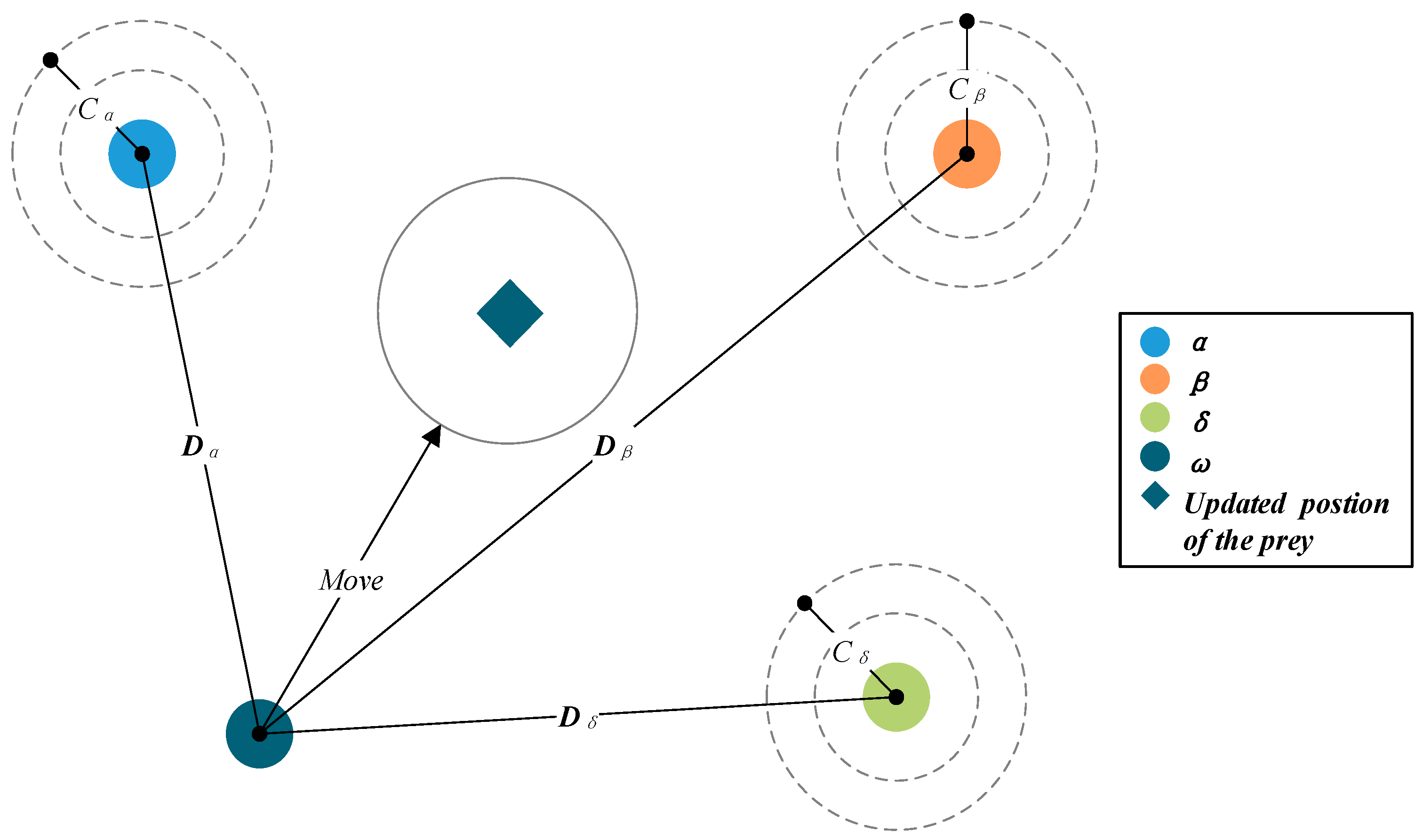
2.2. Hunting Mechanism
| Algorithm 1. The pseudocode of conventional GWO |
| 1. Generate a population Xi (i = 1, 2, …, n) randomly 2. Initialize the parameters of GWO (max_iteration, a, A and C) 3. Calculate the fitness values and assign α, β and δ 4. While (t < max_iteration) 5. For each grey wolf 6. Update the position of the current grey wolf using Equations (6)–(8) 7. End for 8. Update a, A and C 9. Amend the grey wolves’ positions beyond boundary limits 10. Calculate the fitness values of the new positions 11. Update the α, β and δ 12. t = t + 1 13. End while 14. Return the position of α |
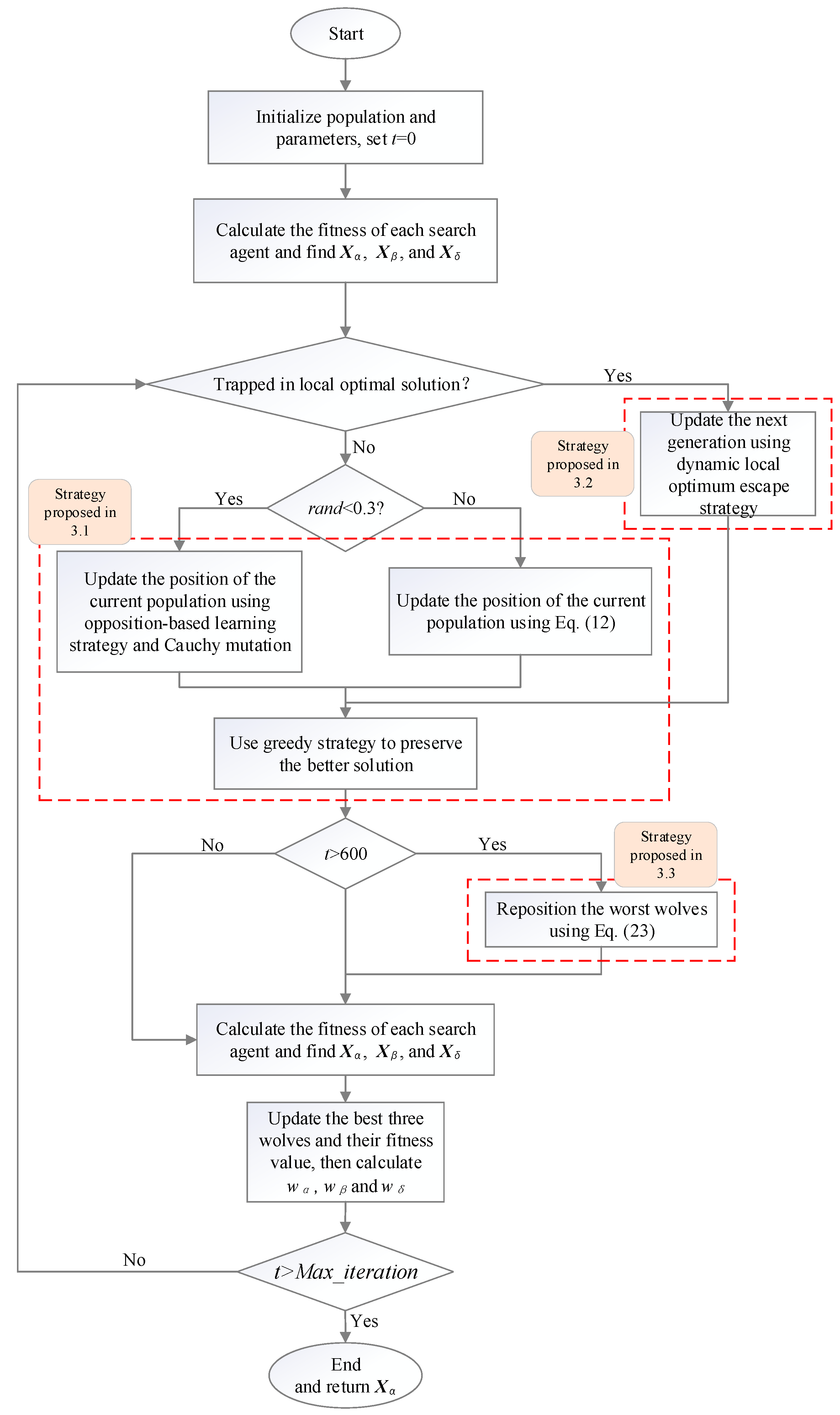
3. Development of IGWO
3.1. Modified Position Update Mechanism
3.2. Dynamic Local Optimum Escape Strategy
3.3. Individual Repositioning Method
4. Numerical Optimization Experiments
4.1. Comparison of IGWO with Different GWO Variants
4.1.1. Analysis of Numerical Results
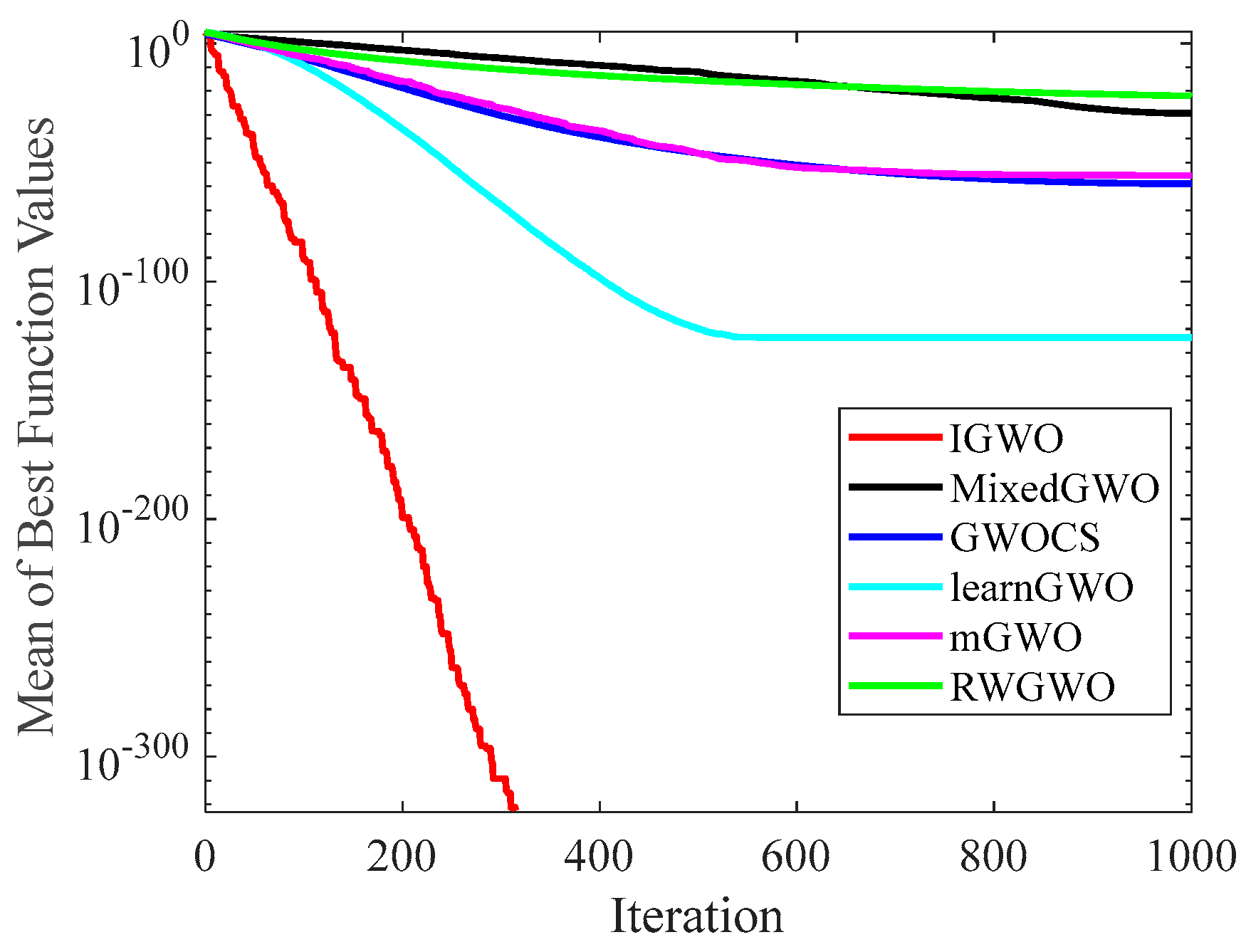
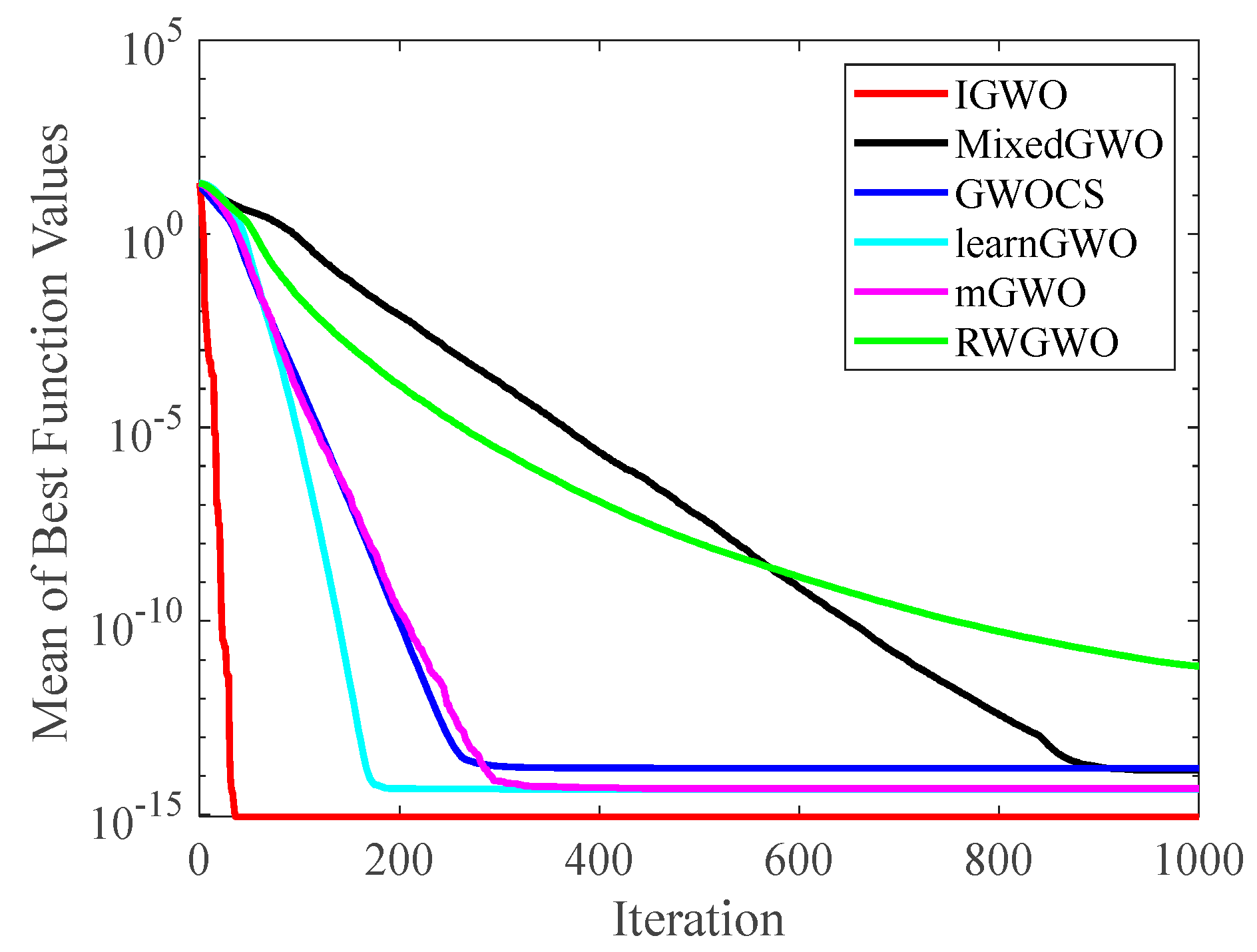
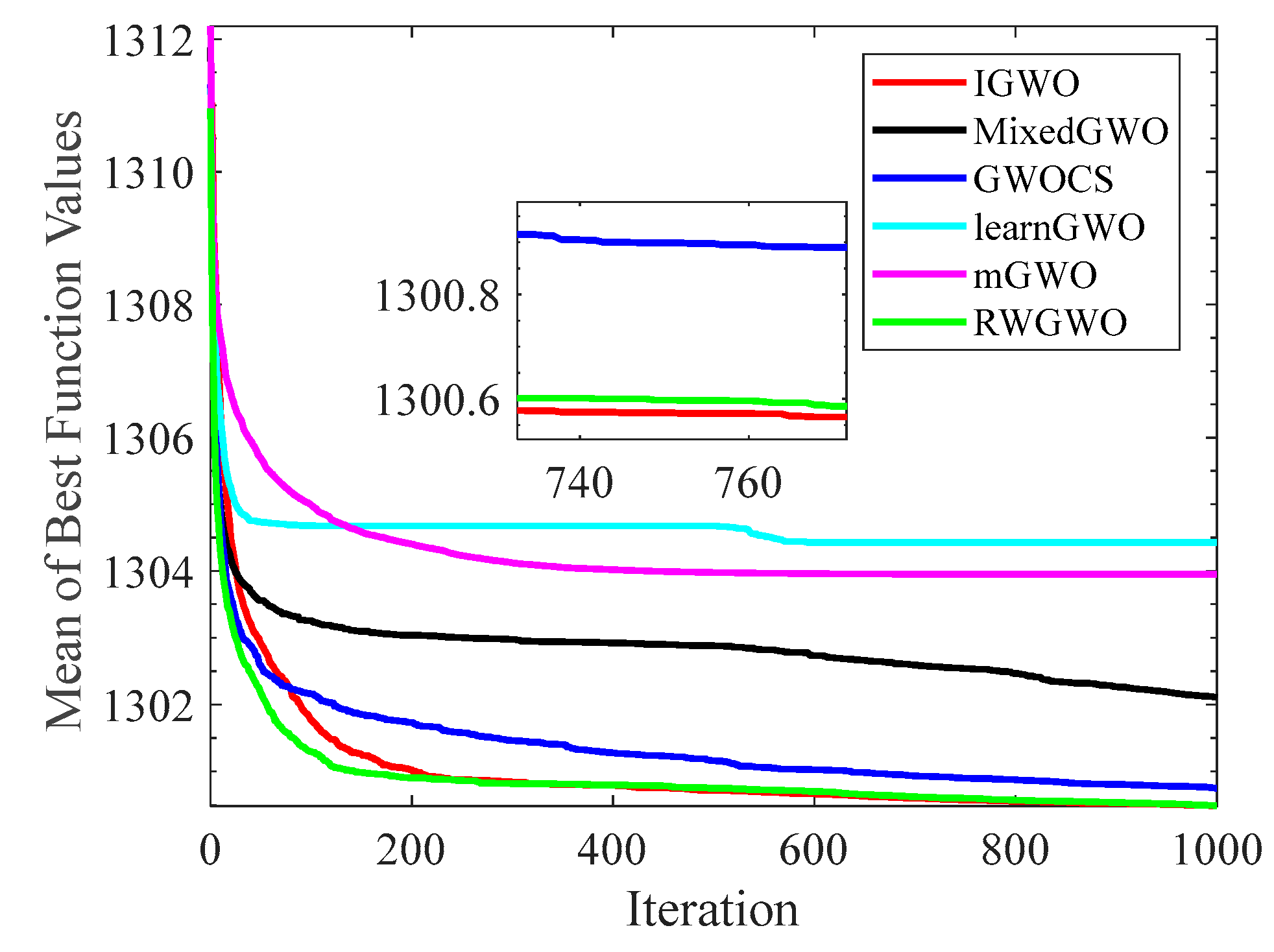
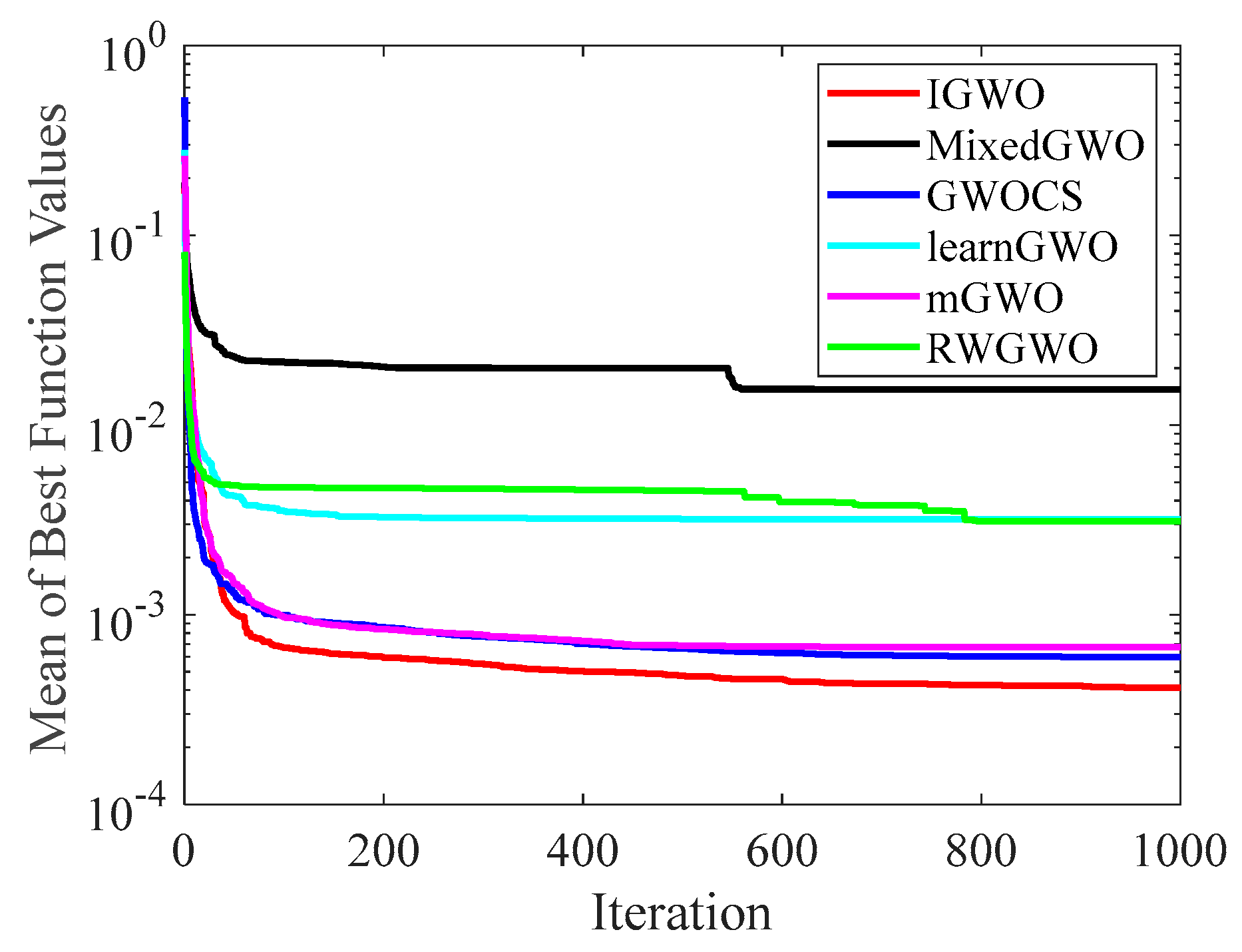
4.1.2. Analysis of Convergence Curves
4.2. Comparison of IGWO with Other Meta-Heuristic Algorithms
4.2.1. Analysis of Numerical Results
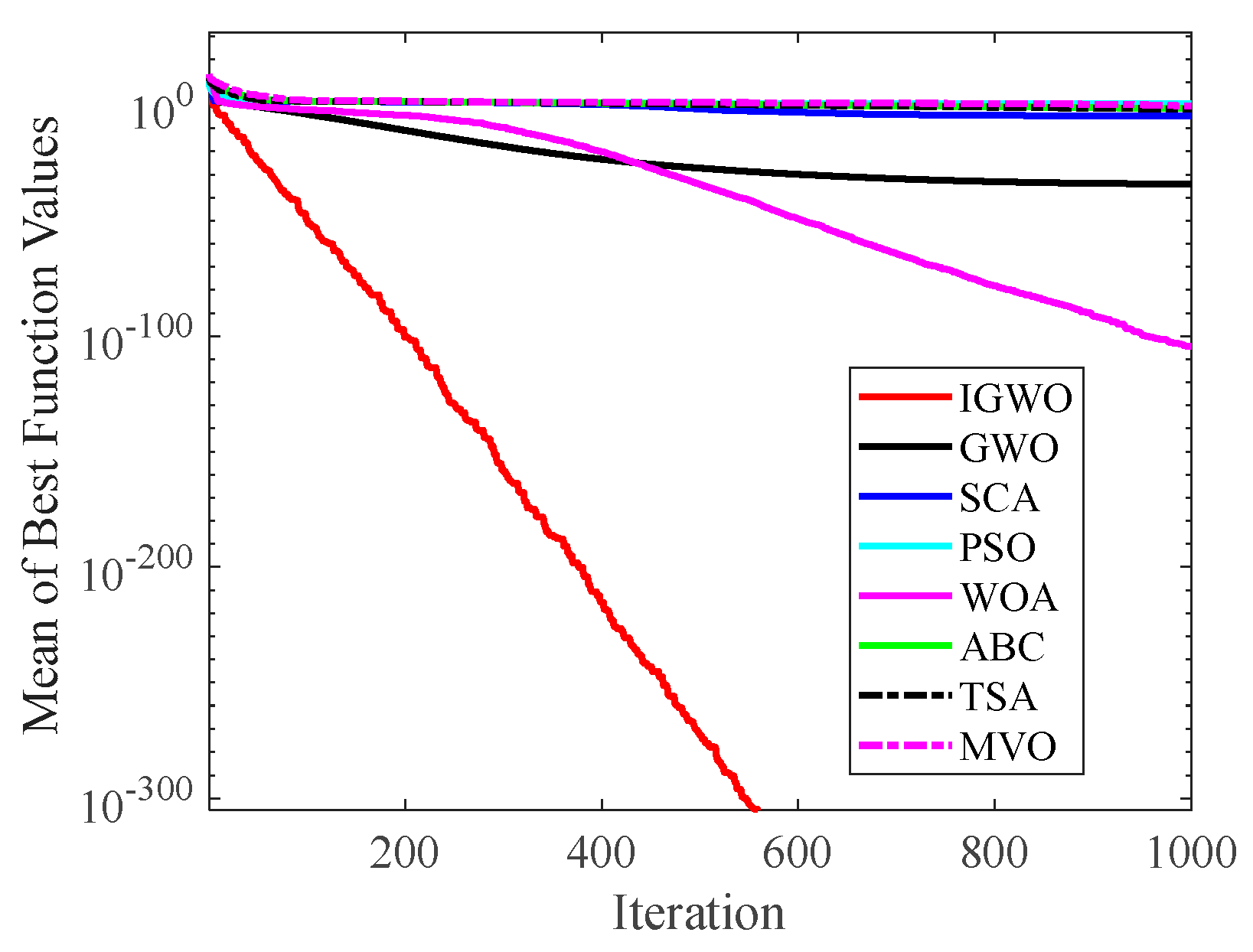
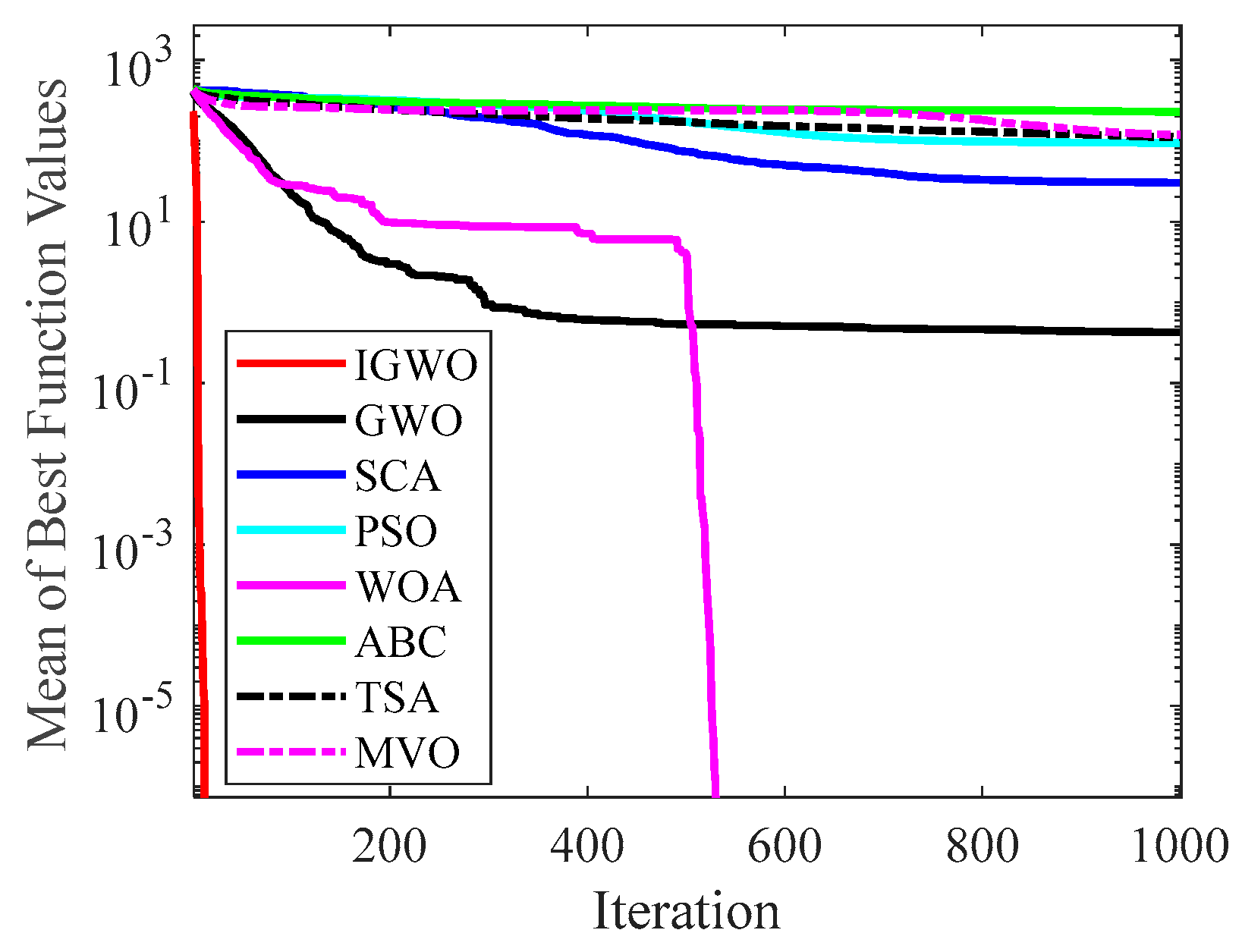
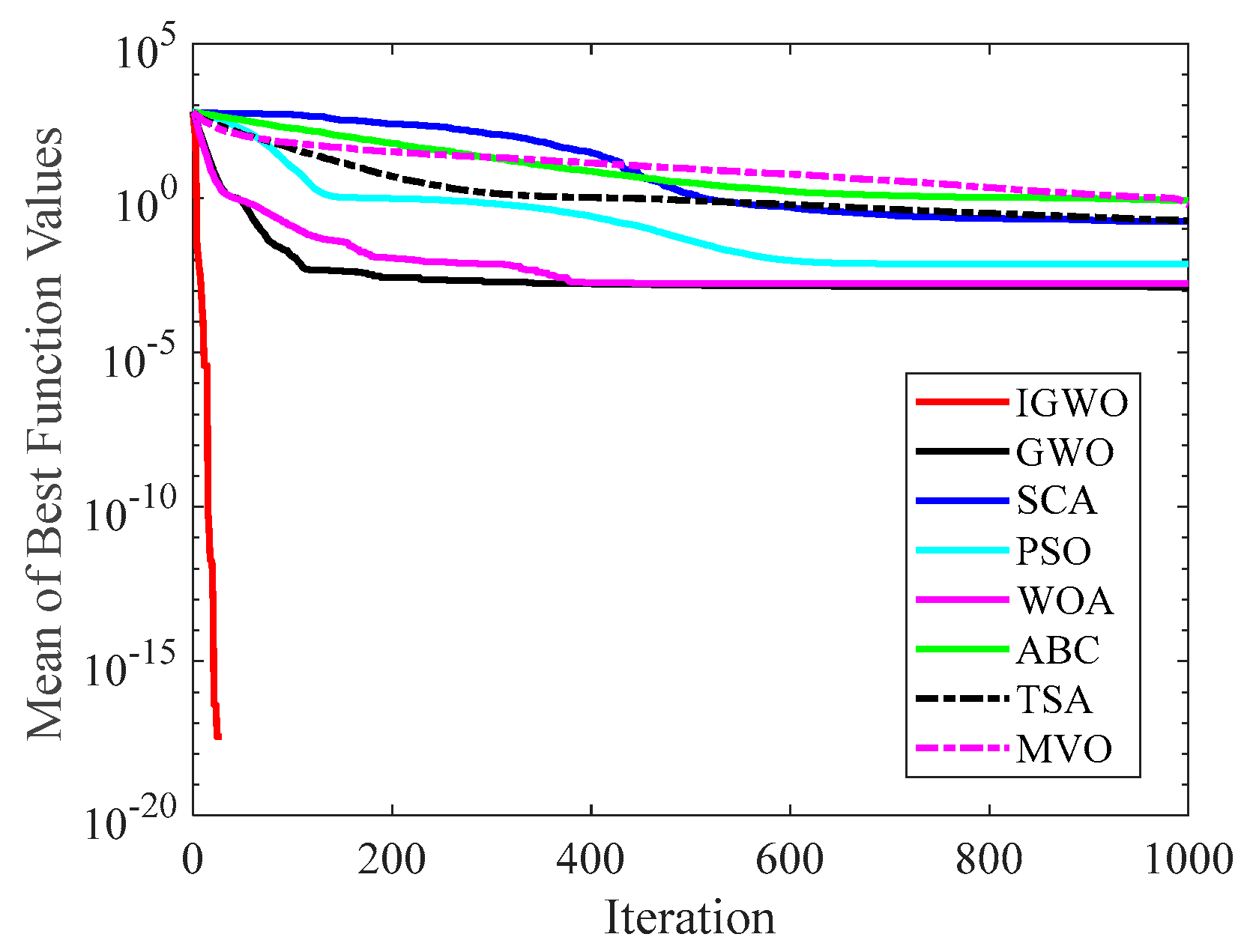
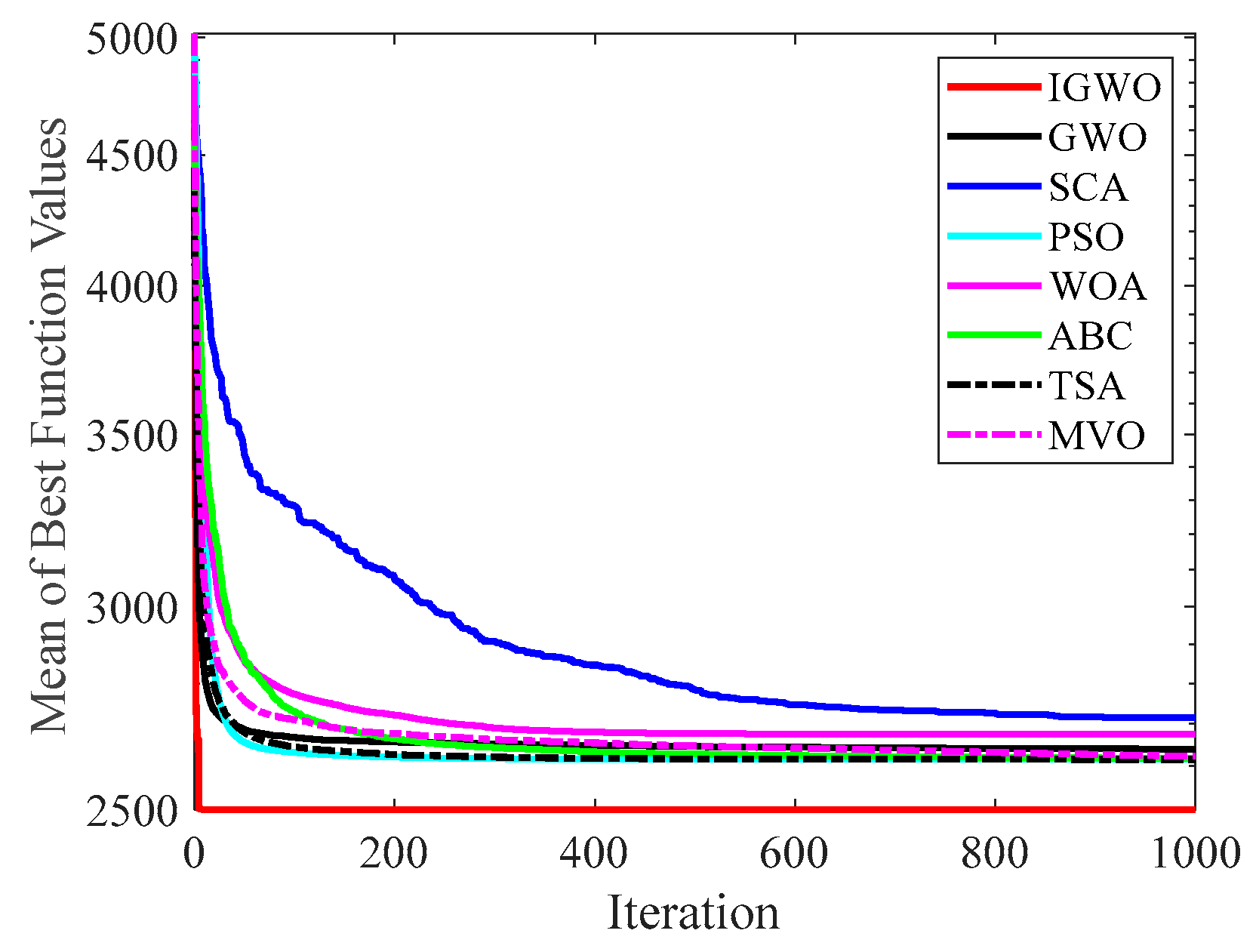
4.2.2. Analysis of Convergence Curve
5. Application of IGWO in Robot Path Planning
5.1. Environment Models
5.2. Path Smoothing
5.3. Construction of Fitness Function
5.4. Experimental Environment and Parameter Setting
5.5. Analysis of Path Planning Results
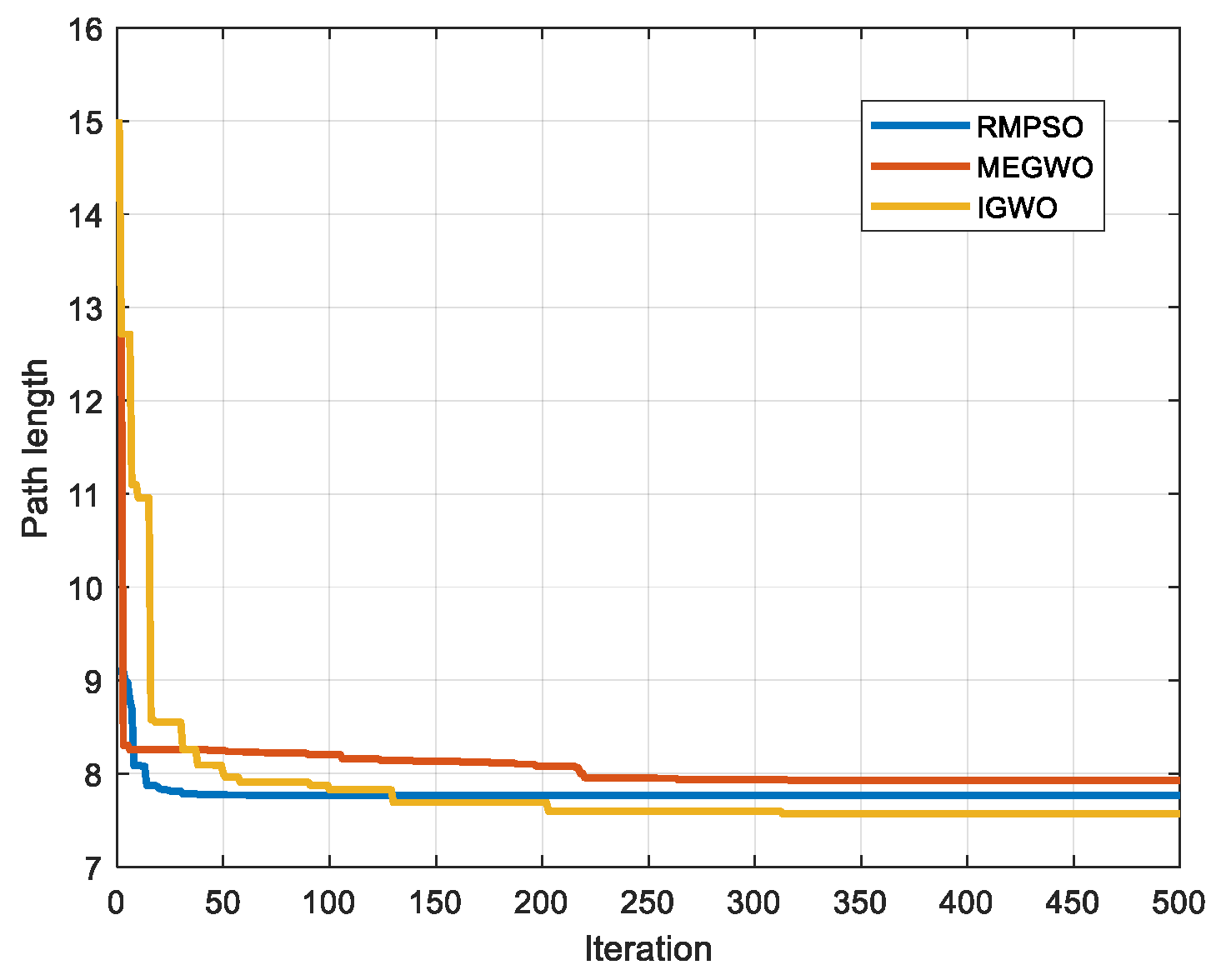
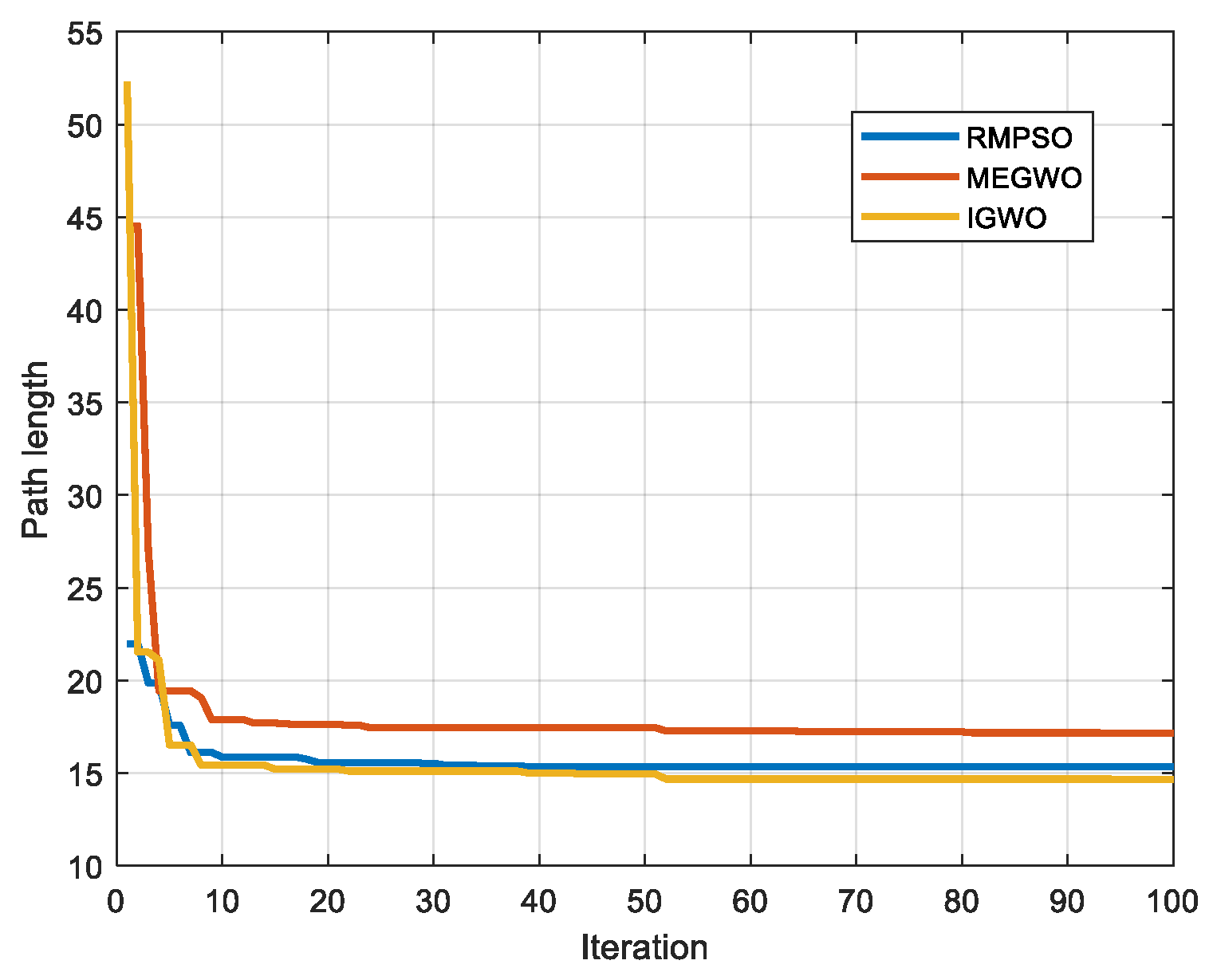
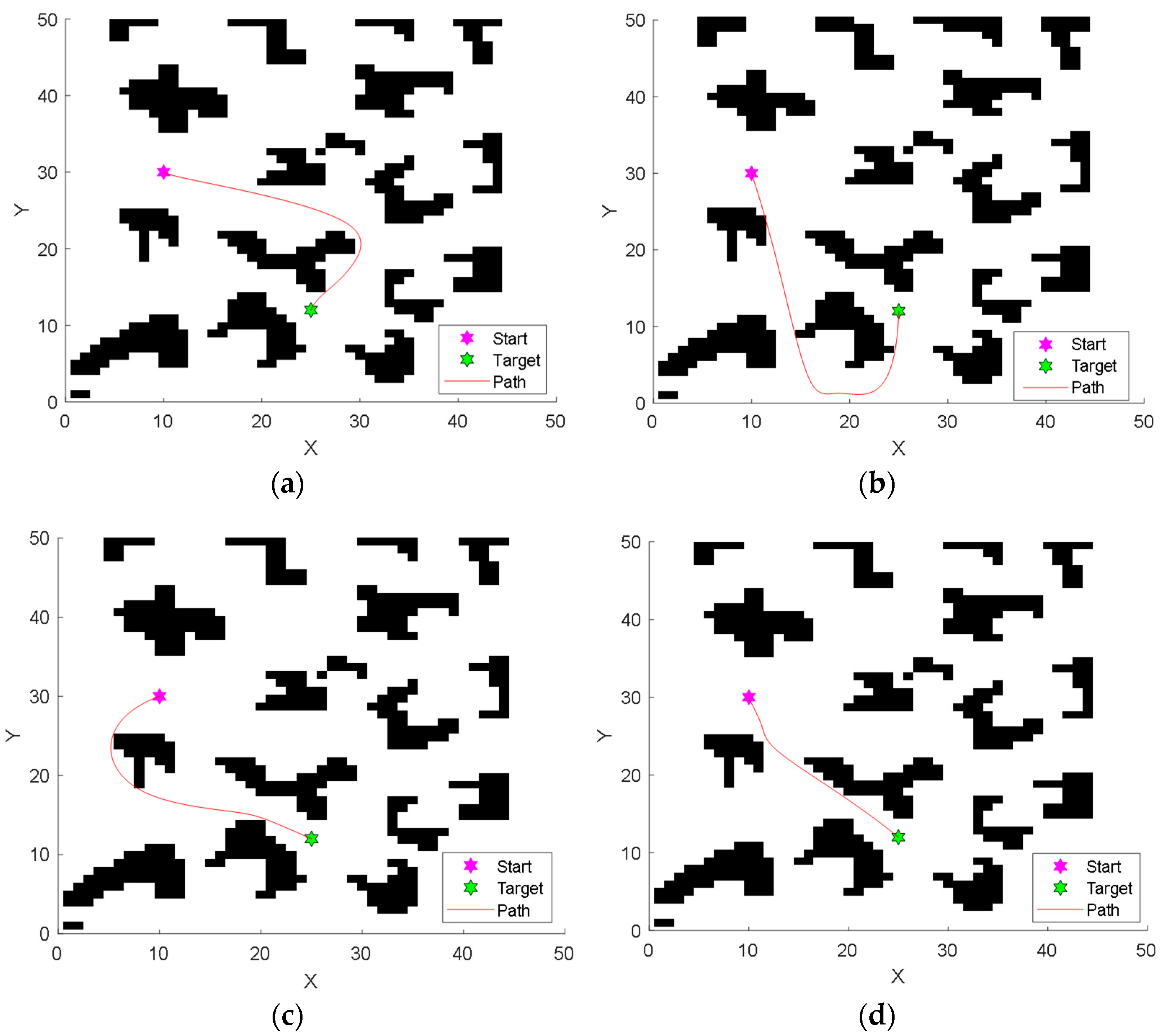
5.5.1. Single Contrast Experiment
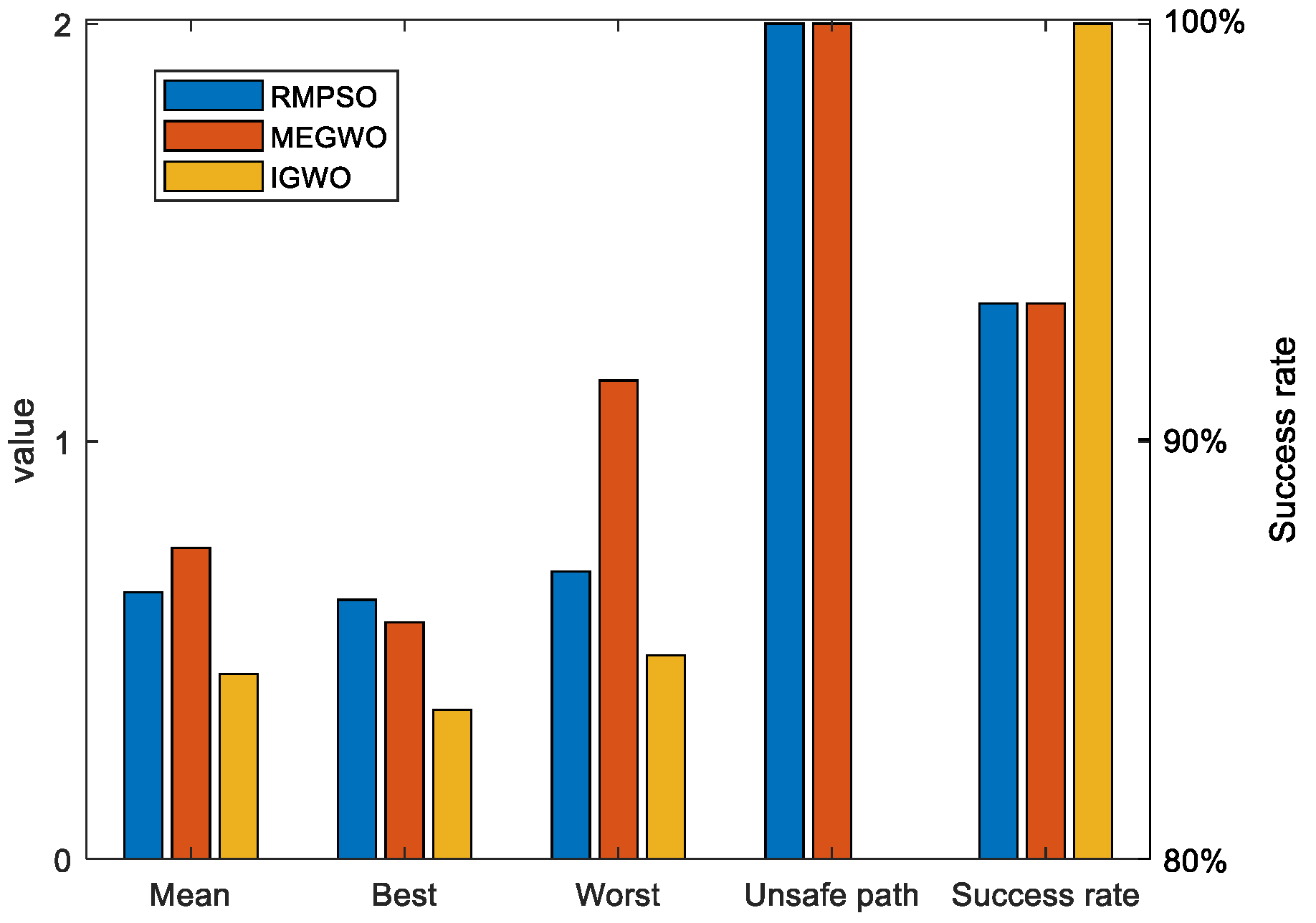
5.5.2. Thirty Independent Contrast Experiments
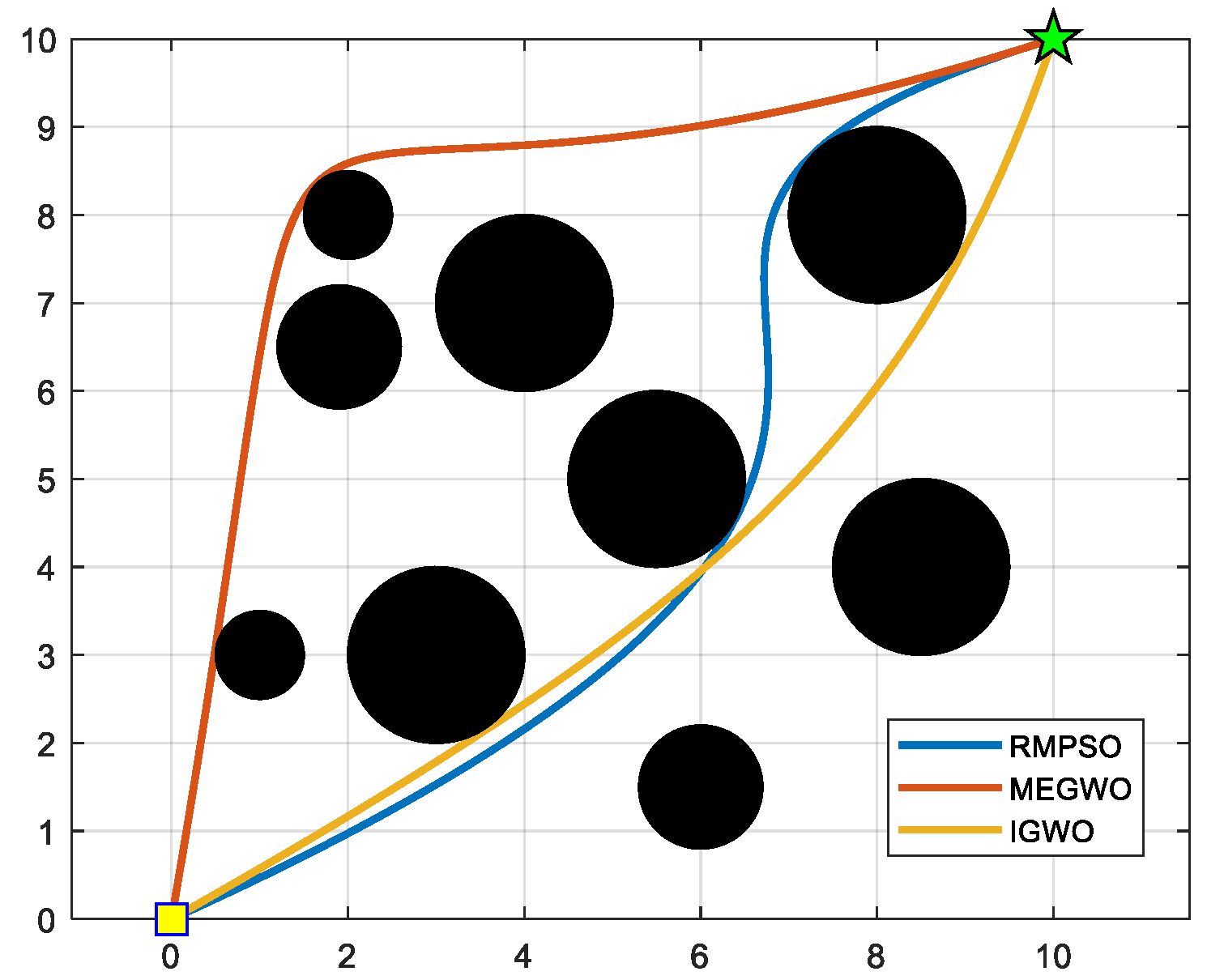
5.6. Contrast Experiment in Complex Environment with Irregular Obstacles
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cui, Z.; Sun, H.M.; Yu, J.T.; Yin, R.; Jia, R. Fast detection method of green peach for application of picking robot. Appl. Intell. 2022, 52, 1718–1739. [Google Scholar] [CrossRef]
- Shin, H.G.; Park, I.; Kim, K.; Kim, H.K.; Chung, W.K. Corneal suturing robot capable of producing sutures with desired shape for corneal transplantation surgery. IEEE Trans. Robot. 2021, 37, 304–312. [Google Scholar] [CrossRef]
- Zhang, M.; Tian, G.; Zhang, Y.; Duan, P. Service skill improvement for home robots: Autonomous generation of action sequence based on reinforcement learning. Knowl. Based Syst. 2021, 212, 106605. [Google Scholar] [CrossRef]
- Lv, Z.; Qiao, L. Deep belief network and linear perceptron based cognitive computing for collaborative robots. Appl. Soft Comput. 2020, 92, 106300. [Google Scholar] [CrossRef]
- Yao, W.; de Marina, H.G.; Lin, B.; Cao, M. Singularity-free guiding vector field for robot navigation. IEEE Trans. Robot 2021, 37, 1206–1221. [Google Scholar] [CrossRef]
- Li, C.; Tian, G. Transferring the semantic constraints in human manipulation behaviors to robots. Appl. Intell. 2020, 50, 1711–1724. [Google Scholar] [CrossRef]
- Gao, Y.; Wei, W.; Wang, X.; Yu, Q. Feasibility, planning and control of ground-wall transition for a suctorial hexapod robot. Appl. Intell. 2021, 51, 5506–5524. [Google Scholar] [CrossRef]
- Tognon, M.; Alami, R.; Siciliano, B. Physical human-robot interaction with a tethered aerial vehicle: Application to a force-based human guiding problem. IEEE Trans. Robot 2021, 37, 723–734. [Google Scholar] [CrossRef]
- Szczepanski, R.; Tarczewski, T. Global path planning for mobile robot based on artificial bee colony and dijkstra’s algorithms. In Proceedings of the IEEE 19th International Power Electronics and Motion Control Conference (PEMC), Gliwice, Poland, 25–29 April 2021; pp. 725–730. [Google Scholar]
- Deng, X.; Li, R.; Zhao, L.; Wang, K.; Gui, X. Multi-obstacle path planning and optimization for mobile robot. Expert. Syst. Appl. 2021, 183, 115445. [Google Scholar] [CrossRef]
- Liu, J.; Yang, J.; Liu, H.; Tian, X.; Gao, M. An improved ant colony algorithm for robot path planning. Soft Comput. 2016, 21, 5829–5839. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the 1995 IEEE International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Trans. Evol. Comput. 1997, 1, 53–66. [Google Scholar] [CrossRef]
- Yang, X.S.; Suash, D. Cuckoo search via Levy flights. In Proceedings of the 2009 World Congress on Nature & Biologically Inspired Computing, Coimbatore, India, 9–11 December 2009; pp. 210–214. [Google Scholar]
- Yang, X.S. A new metaheuristic bat-inspired algorithm. Comput. Knowl. Technol. 2009, 284, 65–74. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Wu, J.; Srivastava, J.; Yun, U.; Tayeb, S.; Lin, J.C. An evolutionary computation-based privacy-preserving data mining model under a multithreshold constraint. Trans. Emerg. Telecommun. Technol. 2021, 32, e4209. [Google Scholar]
- Wu, Z.; Karimi, H.R.; Dang, C. An approximation algorithm for graph partitioning via deterministic annealing neural network. Neural Netw. 2019, 117, 191–200. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Gao, Q.; Jiang, B.; Karimi, H.R. Solving the production transportation problem via a deterministic annealing neural network method. Appl. Math. Comput. 2021, 411, 126518. [Google Scholar] [CrossRef]
- Zivkovic, M.; Stoean, C.; Chhabra, A.; Budimirovic, N.; Petrovic, A.; Bacanin, N. Novel improved salp swarm algorithm: An application for feature selection. Sensors 2022, 22, 1711. [Google Scholar] [CrossRef] [PubMed]
- Singh, N.; Son, L.H.; Chiclana, F.; Magnot, J.P. A new fusion of salp swarm with sine cosine for optimization of non-linear functions. Eng. Comput. 2020, 36, 185–212. [Google Scholar] [CrossRef]
- Qiang, N.; Gao, J.; Gao, F. Multi-robots global path planning based on PSO algorithm and cubic spline. J. Syst. Simul. 2017, 29, 1397–1404. [Google Scholar]
- You, D.; Kang, Y.; Liu, P.; Hu, Y. A path planning method for mobile robot based on improved grey wolf optimizer. Mach. Tool Hydraul. 2021, 49, 1–6. [Google Scholar]
- Xu, L.; Fu, W.; Jiang, W.; Tao, Z. Mobile robots path planning based on 16-directions 24-neighborhoods improved ant colony algorithm. Control. Decis. 2021, 36, 1137–1146. [Google Scholar]
- Song, B.; Wang, Z.; Zou, L. An improved PSO algorithm for smooth path planning of mobile robots using continuous high-degree Bezier curve. Appl. Soft Comput. 2021, 100, 106960. [Google Scholar] [CrossRef]
- Phung, M.D.; Ha, Q.P. Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization. Appl. Soft. Comput. 2021, 107, 107376. [Google Scholar] [CrossRef]
- Song, P.C.; Pan, J.S.; Chu, S.C. A parallel compact cuckoo search algorithm for three-dimensional path planning. Appl. Soft. Comput. 2020, 94, 106443. [Google Scholar] [CrossRef]
- Das, P.K.; Jena, P.K. Multi-robot path planning using improved particle swarm optimization algorithm through novel evolutionary operators. Appl. Soft. Comput. 2020, 92, 106312. [Google Scholar] [CrossRef]
- Medjahed, S.A.; Saadi, T.A.; Benyettou, A.; Ouali, M. Gray wolf optimizer for hyperspectral band selection. Appl. Soft. Comput. 2016, 40, 178–186. [Google Scholar] [CrossRef]
- Hou, Y.; Gao, H.; Wang, Z.; Du, C. Improved grey wolf optimization algorithm and application. Sensors 2022, 22, 3810. [Google Scholar] [CrossRef]
- Wang, S.; Yang, X.; Wang, X.; Qian, Z. A virtual force algorithm-lévy-embedded grey wolf optimization algorithm for wireless sensor network coverage optimization. Sensors 2019, 19, 2735. [Google Scholar] [CrossRef] [PubMed]
- Jarray, R.; Al-Dhaifallah, M.; Rezk, H.; Bouallègue, S. Parallel cooperative coevolutionary grey wolf optimizer for path planning problem of unmanned aerial vehicles. Sensors 2022, 22, 1826. [Google Scholar] [CrossRef]
- Yue, Z.; Zhang, S.; Xiao, W. A novel hybrid algorithm based on grey wolf optimizer and fireworks algorithm. Sensors 2020, 20, 2147. [Google Scholar] [CrossRef] [PubMed]
- Long, W.; Cai, S.; Jiao, J.; Xu, M.; Wu, T. A new hybrid algorithm based on grey wolf optimizer and cuckoo search for parameter extraction of solar photovoltaic models. Energy Conv. Manag. 2020, 203, 112243. [Google Scholar] [CrossRef]
- Peng, T.; Zhou, B. Hybrid bi-objective gray wolf optimization algorithm for a truck scheduling problem in the automotive industry. Appl. Soft Comput. 2019, 81, 105513. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, W.; Pan, Y. Enhancing electronic nose performance by feature selection using an improved grey wolf optimization based algorithm. Sensors 2020, 19, 1577. [Google Scholar] [CrossRef] [PubMed]
- Goel, T.; Murugan, R.; Mirjalili, S.; Chakrabartty, D.K. OptCoNet: An optimized convolutional neural network for an automatic diagnosis of COVID-19. Appl. Intell. 2021, 51, 1351–1366. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, R.; Yang, J.; Lewis, A.; Chiclana, F.; Yang, S. Biology migration algorithm: A new nature-inspired heuristic methodology for global optimization. Soft Comput. 2019, 23, 7333–7358. [Google Scholar] [CrossRef]
- Nadimi-Shahraki, M.H.; Taghian, S.; Mirjalili, S. An improved grey wolf optimizer for solving engineering problems. Expert Syst. Appl. 2021, 166, 113917. [Google Scholar] [CrossRef]
- Qu, C.Z.; Gai, W.D.; Zhong, M.Y.; Zhang, J. A novel reinforcement learning based grey wolf optimizer algorithm for unmanned aerial vehicles (UAVs) path planning. Appl. Soft Comput. 2020, 89, 106099. [Google Scholar] [CrossRef]
- Heidari, A.A.; Abbaspour, R.A.; Chen, H.L. Efficient boosted grey wolf optimizers for global search and kernel extreme learning machine training. Appl. Soft. Comput. 2019, 81, 105521. [Google Scholar] [CrossRef]
- Heidari, A.A.; Pahlavani, P. An efficient modified grey wolf optimizer with Lévy flight for optimization tasks. Appl. Soft Comput. 2017, 60, 115–134. [Google Scholar] [CrossRef]
- Luo, K.P. Enhanced grey wolf optimizer with a model for dynamically estimating the location of the prey. Appl. Soft Comput. 2019, 77, 225–235. [Google Scholar] [CrossRef]
- Liu, J.; Wei, X.; Huang, H. An improved grey wolf optimization algorithm and its application in path planning. IEEE Access 2021, 9, 121944–121956. [Google Scholar] [CrossRef]
- Saxena, A.; Kumar, R.; Das, S. β-chaotic map enabled grey wolf optimizer. Appl. Soft Comput. 2019, 75, 84–105. [Google Scholar] [CrossRef]
- Zhao, X.; Fang, Y.; Liu, L.; Li, J.; Xu, M. An improved moth-flame optimization algorithm with orthogonal opposition-based learning and modified position updating mechanism of moths for global optimization problems. Appl. Intell. 2020, 50, 4434–4458. [Google Scholar] [CrossRef]
- Wang, Z.; Ding, H.; Yang, Z.; Li, B.; Guan, Z.; Bao, L. Rank-driven salp swarm algorithm with orthogonal opposition-based learning for global optimization. Appl. Intell. 2022, 52, 7922–7964. [Google Scholar] [CrossRef]
- Mahdavi, S.; Rahnamayan, S.; Deb, K. Opposition based learning: A literature review. Swarm Evol. Comput. 2018, 39, 1–23. [Google Scholar] [CrossRef]
- Miao, F.; Yao, L.; Zhao, X. Symbiotic organisms search algorithm using random walk and adaptive Cauchy mutation on the feature selection of sleep staging. Expert Syst. Appl. 2021, 176, 114887. [Google Scholar] [CrossRef]
- Miao, Z.; Yuan, X.; Zhou, F.; Qiu, X.; Song, Y.; Chen, K. Grey wolf optimizer with an enhanced hierarchy and its application to the wireless sensor network coverage optimization problem. Appl. Soft Comput. 2020, 96, 106602. [Google Scholar] [CrossRef]
- Martin, B.; Marot, J.; Bourennane, S. Mixed grey wolf optimizer for the joint denoising and unmixing of multispectral images. Appl. Soft Comput. 2019, 74, 385–410. [Google Scholar] [CrossRef]
- Gupta, S.; Deep, K. A memory-based grey wolf optimizer for global optimization tasks. Appl. Soft Comput. 2020, 93, 106367. [Google Scholar] [CrossRef]
- Gupta, S.; Deep, K. A novel random walk grey wolf optimizer. Swarm Evol. Comput. 2019, 44, 101–112. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numerical function optimization: Artificial bee colony (ABC) algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A sine cosine algorithm for solving optimization problems. Knowl. Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Hatamlou, A. Multi-verse optimizer: A nature-inspired algorithm for global optimization. Neural Comput. Appl. 2015, 27, 495–513. [Google Scholar] [CrossRef]
- Kaur, S.; Awasthi, L.K.; Sangal, A.L.; Dhiman, G. Tunicate swarm algorithm: A new bio-inspired based metaheuristic paradigm for global optimization. Eng. Appl. Artif. Intell. 2020, 90, 103541. [Google Scholar] [CrossRef]
- Tu, Q.; Chen, X.; Liu, X. Multi-strategy ensemble grey wolf optimizer and its application to feature selection. Appl. Soft Comput. 2019, 76, 16–30. [Google Scholar] [CrossRef]
- Jana, B.; Mitra, S.; Acharyya, S. Repository and mutation based particle swarm optimization (RMPSO): A new PSO variant applied to reconstruction of gene regulatory network. Appl. Soft Comput. 2019, 74, 330–355. [Google Scholar] [CrossRef]
- Wang, H.; Yin, P.; Zheng, W. Mobile robot path planning based on improved A* algorithm and dynamic window method. Robot 2020, 42, 92–99. [Google Scholar]
- Liu, J.; Ji, H.; Li, Y. Robot path planning based on improved bat algorithm and cubic spline interpolation. Acta Autom. Sin. 2021, 47, 1710–1719. [Google Scholar]
- Zheng, F.; Zecchin, A.C.; Newman, J.P. An adaptive convergence-trajectory controlled ant colony optimization algorithm with application to water distribution system design problems. IEEE Trans. Evol. Comput. 2017, 21, 773–791. [Google Scholar] [CrossRef]
- Dai, J.; Qiu, J.; Yu, H.; Zhang, C.; Wu, Z.; Gao, Q. Robot Static Path Planning Method Based on Deterministic Annealing. Machines 2022, 10, 600. [Google Scholar] [CrossRef]
- Beiranvand, V.; Hare, W.; Lucet, Y. Best practices for comparing optimization algorithms. Optim. Eng. 2017, 18, 815–848. [Google Scholar] [CrossRef] [Green Version]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Test Function | Dim | Range | F * |
|---|---|---|---|---|
| F1 | 30 | [−100, 100]n | 0 | |
| F2 | 30 | [−10, 10]n | 0 | |
| F3 | 30 | [−100, 100]n | 0 | |
| F4 | 30 | [−100, 100]n | 0 | |
| F5 | 30 | [−30, 30]n | 0 | |
| F6 | 30 | [−1.28, 1.28]n | 0 | |
| F7 | 30 | [−5.12, 5.12]n | 0 | |
| F8 | 30 | [−32, 32]n | 0 | |
| F9 | 30 | [−600, 600]n | 0 | |
| F10 | 30 | [−50, 50]n | 0 | |
| F11 | Shifted and Rotated Katsuura Function | 30 | [−100, 100]n | 1200 |
| F12 | Shifted and Rotated HappyCat Function | 30 | [−100, 100]n | 1300 |
| F13 | Shifted and Rotated HGBat Function | 30 | [−100, 100]n | 1400 |
| Function | Test Function | Dim | Range | F * |
|---|---|---|---|---|
| F14 | 4 | [−5, 5]n | 0.00030 | |
| F15 | 2 | [−5, 5]n | 0.398 | |
| F16 | 2 | [−2, 2]n | 3 | |
| F17 | 4 | [0, 10]n | −10.1532 | |
| F18 | Composition Function 1 (N = 5) | 30 | [−100, 100]n | 2300 |
| F19 | Composition Function 2 (N = 3) | 30 | [−100, 100]n | 2400 |
| F20 | Composition Function 3 (N = 3) | 30 | [−100, 100]n | 2500 |
| MixedGWO | GWOCS | LearnGWO | mGWO | RW_GWO | IGWO | ||
|---|---|---|---|---|---|---|---|
| F1 | Mean | 3.83 × 10−30 | 1.60 × 10−59 | 1.3498 × 10−123 | 7.04 × 10−60 | 1.46 × 10−22 | 0 |
| Std | 3.94 × 10−29 | 2.27 × 10−58 | 2.8395 × 10−122 | 1.47 × 10−58 | 9.50 × 10−22 | 0 | |
| R/T | 5/+ | 4/+ | 2/+ | 3/+ | 6/+ | 1 | |
| F2 | Mean | 1.09 × 10−18 | 4.00 × 10−35 | 6.09 × 10−69 | 3.02 × 10−38 | 1.04 × 10−11 | 0 |
| Std | 1.02 × 10−17 | 2.50 × 10−34 | 4.57 × 10−68 | 7.56 × 10−37 | 1.96 × 10−11 | 0 | |
| R/T | 5/+ | 4/+ | 2/+ | 3/+ | 6/+ | 1 | |
| F3 | Mean | 8.28 × 10−5 | 3.57 × 10−15 | 2.83 × 10−89 | 3.35 × 10+3 | 1.02 × 10−9 | 0 |
| Std | 0.0011 | 9.19 × 10−14 | 7.08 × 10−88 | 1.23 × 10+4 | 1.41 × 10−8 | 0 | |
| R/T | 5/+ | 3/+ | 2/+ | 6/+ | 4/+ | 1 | |
| F4 | Mean | 7.28 × 10−6 | 1.01 × 10−14 | 2.91 × 10−51 | 3.44 × 10−10 | 5.46 × 10−8 | 0 |
| Std | 6.54 × 10−5 | 1.03 × 10−13 | 3.76 × 10−50 | 9.61 × 10−9 | 1.37 × 10−6 | 0 | |
| R/T | 6/+ | 3/+ | 2/+ | 4/+ | 5/+ | 1 | |
| F5 | Mean | 28.8373 | 26.9401 | 28.5497 | 28.6775 | 26.5379 | 27.5219 |
| Std | 0.1036 | 3.7477 | 1.9255 | 0.7313 | 2.9594 | 3.7676 | |
| R/T | 6/+ | 2/− | 4/+ | 5/+ | 1/− | 3 | |
| F6 | Mean | 0.0025 | 8.88 × 10−4 | 8.10 × 10−5 | 4.16 × 10−4 | 9.20 × 10−4 | 8.95 × 10−5 |
| Std | 0.0051 | 0.0018 | 3.21 × 10−4 | 0.0021 | 2.70 × 10−3 | 2.50 × 10−4 | |
| R/T | 6/+ | 4/+ | 1/− | 3/+ | 5/+ | 2 | |
| F7 | Mean | 19.3405 | 1.3586 | 0 | 7.0415 | 1.4371 | 0 |
| Std | 50.5218 | 19.1616 | 0 | 144.5174 | 17.6327 | 0 | |
| R/T | 5/+ | 2/+ | 1/≈ | 4/+ | 3/+ | 1 | |
| F8 | Mean | 1.58 × 1014 | 1.55 × 10−14 | 4.56 × 10−15 | 4.56 × 10−15 | 6.18 × 10−12 | 8.88 × 10−16 |
| Std | 2.87 × 10−14 | 1.58 × 10−14 | 3.49 × 10−15 | 6.12 × 10−15 | 1.19 × 10−11 | 0 | |
| R/T | 5/+ | 4/+ | 2/+ | 3/+ | 6/+ | 1 | |
| F9 | Mean | 0.0021 | 5.75 × 10−4 | 1.11 × 10−4 | 0.0021 | 3.26 × 10−4 | 0 |
| Std | 0.0409 | 0.0112 | 0.0033 | 0.0632 | 0.0096 | 0 | |
| R/T | 5/+ | 4/+ | 2/≈ | 6/≈ | 3/+ | 1 | |
| F10 | Mean | 0.5419 | 0.0396 | 0.6079 | 0.0619 | 0.0012 | 0.1822 |
| Std | 0.8062 | 0.1137 | 0.8432 | 0.1819 | 0.009 | 0.5448 | |
| R/T | 5/+ | 2/− | 6/+ | 3/− | 1/− | 4 | |
| F11 | Mean | 1203.1 | 1202.5 | 1203.2 | 1202.0 | 1200.9 | 1201.5 |
| Std | 1.4643 | 7.837 | 2.5871 | 1.8016 | 5.2961 | 2.1432 | |
| R/T | 4/+ | 6/+ | 5/+ | 3/+ | 1/− | 2 | |
| F12 | Mean | 1302.1 | 1300.7 | 1304.4 | 1304.0 | 1300.6 | 1300.5 |
| Std | 6.7783 | 3.1098 | 2.5492 | 4.0168 | 0.5621 | 0.0695 | |
| R/T | 4/+ | 3/+ | 6/+ | 5/+ | 2/+ | 1 | |
| F13 | Mean | 1435.3 | 1410.8 | 1499.5 | 1472.9 | 1400.8 | 1400.4 |
| Std | 107.6842 | 50.4025 | 124.8757 | 126.7876 | 1.7689 | 1.7390 | |
| R/T | 4/+ | 3/+ | 6/+ | 5/+ | 2/+ | 1 |
| MixedGWO | GWOCS | LearnGWO | mGWO | RW_GWO | IGWO | ||
|---|---|---|---|---|---|---|---|
| F14 | Mean | 0.0099 | 3.78 × 10−4 | 5.70 × 10−3 | 8.73 × 10−4 | 0.0023 | 3.33 × 10−4 |
| Std | 0.0073 | 0.0013 | 4.37 × 10−2 | 0.0047 | 0.0329 | 2.58 × 10−4 | |
| R/T | 6/+ | 2/+ | 4/+ | 3/+ | 5/+ | 1 | |
| F15 | Mean | 0.4576 | 0.398 | 0.4003 | 0.398 | 0.398 | 0.398 |
| Std | 0 | 8.74 × 10−7 | 0.0224 | 3.97 × 10−8 | 2.14 × 10−6 | 1.03 × 10−8 | |
| R/T | 6/+ | 3/+ | 5/+ | 2/+ | 4/+ | 1 | |
| F16 | Mean | 3 | 3 | 3.0093 | 3 | 3 | 3 |
| Std | 0 | 3.69 × 10−5 | 0.273 | 1.06 × 10−12 | 6.53 × 10−5 | 3.56 × 10−5 | |
| R/T | 1/− | 4/+ | 6/+ | 2/− | 5/+ | 3 | |
| F17 | Mean | −10.4028 | −9.873 | −4.8074 | −9.1627 | −9.481 | −10.057 |
| Std | 2.83 × 10−4 | 7.1031 | 3.8401 | 12.3134 | 11.3324 | 5.7099 | |
| R/T | 1− | 3/+ | 6/+ | 5/+ | 4/+ | 2 | |
| F18 | Mean | 2662.4 | 2642.7 | 2745.2 | 2673.7 | 2626.2 | 2500 |
| Std | 115.9621 | 69.9378 | 210.9216 | 190.9163 | 23.952 | 0 | |
| R/T | 5/+ | 3/+ | 4/+ | 6/+ | 2/+ | 1 | |
| F19 | Mean | 2600.2 | 2600 | 2600 | 2600.4 | 2600 | 2600 |
| Std | 0.3285 | 0.0604 | 2.1052 × 10−6 | 1.4886 | 0.09 | 0 | |
| R/T | 5/+ | 3/+ | 2/+ | 6/+ | 4/+ | 1 | |
| F20 | Mean | 2704.5 | 2700.4 | 2700 | 2700.9 | 2712.5 | 2700 |
| Std | 38.3336 | 13.1324 | 6.4311 × 10−13 | 27.4906 | 30.3025 | 4.5475 × 10−13 | |
| R/T | 5/+ | 3/+ | 2/+ | 4/+ | 6/+ | 1 |
| Result | MixedGWO | GWOCS | LearnGWO | mGWO | RW_GWO | IGWO |
|---|---|---|---|---|---|---|
| +/≈/− | 18/0/2 | 18/0/2 | 17/2/1 | 17/1/2 | 17/0/3 | ~ |
| Mean rank | 4.7 | 3.25 | 3.5 | 4.05 | 3.75 | 1.5 |
| Overall rank | 6 | 2 | 4 | 5 | 3 | 1 |
| GWO | SCA | PSO | WOA | ABC | TSA | MVO | IGWO | ||
|---|---|---|---|---|---|---|---|---|---|
| F1 | Mean | 2.07 × 10−59 | 1.25 × 10−2 | 9.43 × 10−9 | 6.59 × 10−150 | 0.7887 | 6.02 × 10−6 | 0.2963 | 0 |
| Std | 1.33 × 10−58 | 1.07 × 10−1 | 1.88 × 10−7 | 1.77 × 10−148 | 2.1909 | 1.59 × 10−5 | 0.3969 | 0 | |
| R/T | 3/+ | 6/+ | 4/+ | 2/+ | 8/+ | 5/+ | 7/+ | 1 | |
| F2 | Mean | 1.83 × 10−34 | 1.20 × 10−5 | 6.0004 | 1.27 × 10−102 | 0.0363 | 0.0208 | 0.4606 | 0 |
| Std | 1.78 × 10−33 | 1.26 × 10−5 | 38.9865 | 2.18 × 10−101 | 0.056 | 0.0305 | 1.1093 | 0 | |
| R/T | 3/+ | 4/+ | 8/+ | 2/+ | 6/+ | 5/+ | 7/+ | 1 | |
| F3 | Mean | 1.20 × 10−12 | 6.57 × 103 | 16.3022 | 1.76 × 104 | 3.41 × 104 | 2.67 × 104 | 45.3638 | 0 |
| Std | 3.44 × 10−11 | 4.86 × 103 | 46.3105 | 4.31 × 104 | 2.04 × 104 | 1.49 × 104 | 120.8618 | 0 | |
| R/T | 2/+ | 5/+ | 3/+ | 6/+ | 8/+ | 7/+ | 4/+ | 1 | |
| F4 | Mean | 2.25 × 10−14 | 17.9 | 0.6072 | 36.9902 | 53.3308 | 26.7721 | 1.0175 | 0 |
| Std | 1.07 × 10−13 | 9.85 | 0.6718 | 113.8156 | 24.6552 | 17.5272 | 1.7441 | 0 | |
| R/T | 2/+ | 5/+ | 3/+ | 7/+ | 8/+ | 6/+ | 4/+ | 1 | |
| F5 | Mean | 26.7285 | 579.7010 | 56.6336 | 27.2767 | 1.72 × 104 | 125.1067 | 425.0734 | 27.6068 |
| Std | 3.1903 | 1.41 × 104 | 233.9869 | 3.1856 | 5.29 × 104 | 232.5186 | 3.53 × 103 | 3.7676 | |
| R/T | 1/− | 6/+ | 4/+ | 2/− | 8/+ | 5/+ | 7/+ | 3 | |
| F6 | Mean | 8.28 × 10−4 | 5.09 × 10−2 | 4.8865 | 0.0021 | 0.2127 | 0.2946 | 0.0222 | 9.13 × 10−5 |
| Std | 0.0016 | 7.87 × 10−2 | 26.4596 | 0.0104 | 0.1851 | 0.2579 | 0.0465 | 2.49 × 10−4 | |
| R/T | 2/+ | 5/+ | 8/+ | 3/+ | 6/+ | 7/+ | 4/+ | 1 | |
| F7 | Mean | 0.7531 | 10.4 | 86.7988 | 8.53 × 10−15 | 224.9901 | 107.1537 | 111.7582 | 0 |
| Std | 10.908 | 16.4 | 123.4636 | 1.21 × 10−13 | 93.4056 | 53.0099 | 198.3001 | 0 | |
| R/T | 3/+ | 4/+ | 5/+ | 2/+ | 8/+ | 6/+ | 7/+ | 1 | |
| F8 | Mean | 1.67 × 10−14 | 16.1 | 4.24 × 10−05 | 4.97 × 10−15 | 1.569 | 1.3307 | 0.9705 | 8.88 × 10−16 |
| Std | 1.55 × 10−14 | 8.48 | 2.64 × 10−04 | 1.36 × 10−14 | 2.5771 | 4.6003 | 3.2009 | 0 | |
| R/T | 3/+ | 8/+ | 4/+ | 2/+ | 7/+ | 6/+ | 5/+ | 1 | |
| F9 | Mean | 0.0036 | 0.335 | 0.0094 | 0.0036 | 0.8348 | 0.2145 | 0.554 | 0 |
| Std | 0.0299 | 0.335 | 0.0443 | 0.0699 | 0.4122 | 0.3981 | 0.5881 | 0 | |
| R/T | 2/+ | 6/+ | 4/+ | 3/≈ | 8/+ | 5/+ | 7/+ | 1 | |
| F10 | Mean | 0.0427 | 4.1166 | 0.0173 | 0.0069 | 6.3958 × 103 | 0.6925 | 1.2145 | 0.1822 |
| Std | 0.1214 | 68.7625 | 0.2116 | 0.0234 | 6.5686 × 104 | 2.1067 | 4.9150 | 0.5448 | |
| R/T | 3/− | 7/+ | 2/− | 1/− | 8/+ | 5/+ | 6/+ | 4 | |
| F11 | Mean | 1202.3 | 1203.1 | 1200.4 | 1202.3 | 1203.3 | 1201.5 | 1200.7 | 1201.5 |
| Std | 6.2334 | 1.2522 | 1.6106 | 3.9568 | 2.4321 | 2.8913 | 1.8405 | 1.1522 | |
| R/T | 6/+ | 7/+ | 1/− | 5/+ | 8/+ | 4/+ | 2/− | 3 | |
| F12 | Mean | 1300.6 | 1303.8 | 1300.5 | 1300.6 | 1300.6 | 1300.6 | 1300.7 | 1300.5 |
| Std | 2.0869 | 1.7531 | 0.6553 | 0.7098 | 0.4312 | 0.3043 | 0.8459 | 0.0700 | |
| R/T | 6/+ | 8/+ | 2/+ | 5/+ | 4/+ | 3/+ | 7/+ | 1 | |
| F13 | Mean | 1405.5 | 1472.1 | 1400.7 | 1403.0 | 1400.8 | 1400.3 | 1400.7 | 1400.6 |
| Std | 44.3370 | 74.1032 | 8.0383 | 26.9729 | 0.2715 | 0.2175 | 1.9733 | 1.9105 | |
| R/T | 7/+ | 8/+ | 4/+ | 6/+ | 5/+ | 1/− | 3/+ | 2 |
| GWO | SCA | PSO | WOA | ABC | TSA | MVO | IGWO | ||
|---|---|---|---|---|---|---|---|---|---|
| F14 | mean | 0.0014 | 1.00 × 10−3 | 0.0057 | 6.09 × 10−4 | 6.22 × 10−4 | 3.83 × 10−4 | 0.0034 | 3.33 × 10−4 |
| sd | 0.0195 | 4.23 × 10−4 | 0.0335 | 0.0015 | 4.51 × 10−4 | 2.51 × 10−4 | 0.0366 | 2.58 × 10−4 | |
| R/T | 6/+ | 5/+ | 8/+ | 3/+ | 4/+ | 2/+ | 7/+ | 1 | |
| F15 | mean | 0.398 | 0.399 | 0.398 | 0.398 | 0.398 | 0.398 | 0.398 | 0.398 |
| sd | 9.97 × 10−5 | 1.45 × 10−3 | 0 | 2.43 × 10−6 | 0 | 0 | 1.16 × 10−6 | 5.71 × 10−08 | |
| R/T | 5/+ | 6/+ | 1/− | 4/+ | 1/− | 1/− | 3/+ | 2 | |
| F16 | mean | 3 | 3 | 3 | 3 | 3 | 3 | 5.7 | 3 |
| sd | 2.95 × 10−05 | 1.37 × 10−05 | 4.97 × 10−15 | 1.50 × 10−04 | 1.54 × 10−15 | 3.29 × 10−15 | 79.6386 | 1.07 × 10−06 | |
| R/T | 6/+ | 5/+ | 3/− | 7/+ | 1/− | 2/− | 8/+ | 4 | |
| F17 | mean | −9.8160 | −3.45 | −7.9464 | −8.5398 | −10.1526 | −10.1532 | −7.6246 | −10.0786 |
| sd | 6.9026 | 12.5768 | 15.1201 | 13.6539 | 0.0175 | 1.46 × 10−14 | 15.1507 | 2.3102 | |
| R/T | 4/+ | 8/+ | 7/+ | 5/+ | 2/− | 1/− | 6/+ | 3 | |
| F18 | mean | 2641.6 | 2713.4 | 2616.4 | 2668.3 | 2617.4 | 2615.3 | 2623.7 | 2500 |
| sd | 68.8862 | 142.2616 | 12.1211 | 264.5586 | 4.1657 | 0.0414 | 30.339 | 0 | |
| R/T | 6/+ | 8/+ | 3/+ | 7/+ | 4/+ | 2/+ | 5/+ | 1 | |
| F19 | mean | 2600 | 2607.1 | 2624.4 | 2608.7 | 2638.5 | 2633.5 | 2636.5 | 2600 |
| sd | 0.0727 | 40.0755 | 43.338 | 35.6168 | 20.2054 | 8.637 | 35.5488 | 0 | |
| R/T | 2/+ | 3/+ | 5/+ | 4/+ | 8/+ | 6/+ | 7/+ | 1 | |
| F20 | mean | 2712.3 | 2739.6 | 2718.1 | 2722.9 | 2741.4 | 2719.9 | 2708.1 | 2700 |
| sd | 31.8856 | 50.1478 | 26.4854 | 112.5271 | 42.1794 | 13.3521 | 11.7235 | 4.55 × 10−13 | |
| R/T | 3/+ | 7/+ | 4/+ | 6/+ | 8/+ | 5/+ | 2/+ | 1 |
| Result | GWO | SCA | PSO | WOA | ABC | TSA | MVO | IGWO |
|---|---|---|---|---|---|---|---|---|
| +/≈/− | 18/0/2 | 20/0/0 | 16/0/4 | 17/1/2 | 17/0/3 | 16/0/4 | 19/0/1 | ~ |
| Mean rank | 3.75 | 6.05 | 4.15 | 4.1 | 6 | 4.2 | 5.4 | 1.7 |
| Overall rank | 2 | 8 | 4 | 3 | 7 | 5 | 6 | 1 |
| Simple Environment (Case 1) | Complex Environment (Case 2) | |
|---|---|---|
| Obstacles | 3 | 9 |
| Starting point | (0,0) | (0, 0) |
| Ending point | (4,6) | (10, 10) |
| The shortest length | 7.21 | 14.14 |
| Simple Environment (Case 1) | Complex Environment (Case 2) | |
|---|---|---|
| Population size | 30 | 30 |
| Path points | 2 | 2 |
| Interpolation points | 100 | 100 |
| Iterations | 100 | 100 |
| Mean | Best | Worst | Unsafe Path | Success Rate | |
|---|---|---|---|---|---|
| RMPSO | 7.8486 | 7.8308 | 7.8989 | 3 | 90% |
| MEGWO | 7.9557 | 7.7764 | 8.3557 | 3 | 90% |
| IGWO | 7.6529 | 7.5669 | 7.6981 | 0 | 100% |
| Mean | Best | Worst | Unsafe Paths | Success Rate | |
|---|---|---|---|---|---|
| RMPSO | 15.5894 | 14.9284 | 17.5323 | 4 | 86.67% |
| MEGWO | 16.1491 | 14.5662 | 17.6817 | 3 | 90% |
| IGWO | 14.7052 | 14.5691 | 14.8698 | 0 | 100% |
| Iteration | Path Length | Success Rate | |
|---|---|---|---|
| RMPSO | 96 | 36.289 | 86.67% |
| MEGWO | 93 | 40.1963 | 83.33% |
| mGWO | 101 | 39.3321 | 80% |
| IGWO | 72 | 31.8779 | 90% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, L.; Yuan, X.; Yan, B.; Song, Y.; Xu, Q.; Yang, X. An Improved Grey Wolf Optimization with Multi-Strategy Ensemble for Robot Path Planning. Sensors 2022, 22, 6843. https://doi.org/10.3390/s22186843
Dong L, Yuan X, Yan B, Song Y, Xu Q, Yang X. An Improved Grey Wolf Optimization with Multi-Strategy Ensemble for Robot Path Planning. Sensors. 2022; 22(18):6843. https://doi.org/10.3390/s22186843
Chicago/Turabian StyleDong, Lin, Xianfeng Yuan, Bingshuo Yan, Yong Song, Qingyang Xu, and Xiongyan Yang. 2022. "An Improved Grey Wolf Optimization with Multi-Strategy Ensemble for Robot Path Planning" Sensors 22, no. 18: 6843. https://doi.org/10.3390/s22186843
APA StyleDong, L., Yuan, X., Yan, B., Song, Y., Xu, Q., & Yang, X. (2022). An Improved Grey Wolf Optimization with Multi-Strategy Ensemble for Robot Path Planning. Sensors, 22(18), 6843. https://doi.org/10.3390/s22186843