


Scale-Space Feature Recalibration Network for Single Image Deraining

Abstract
:1. Introduction
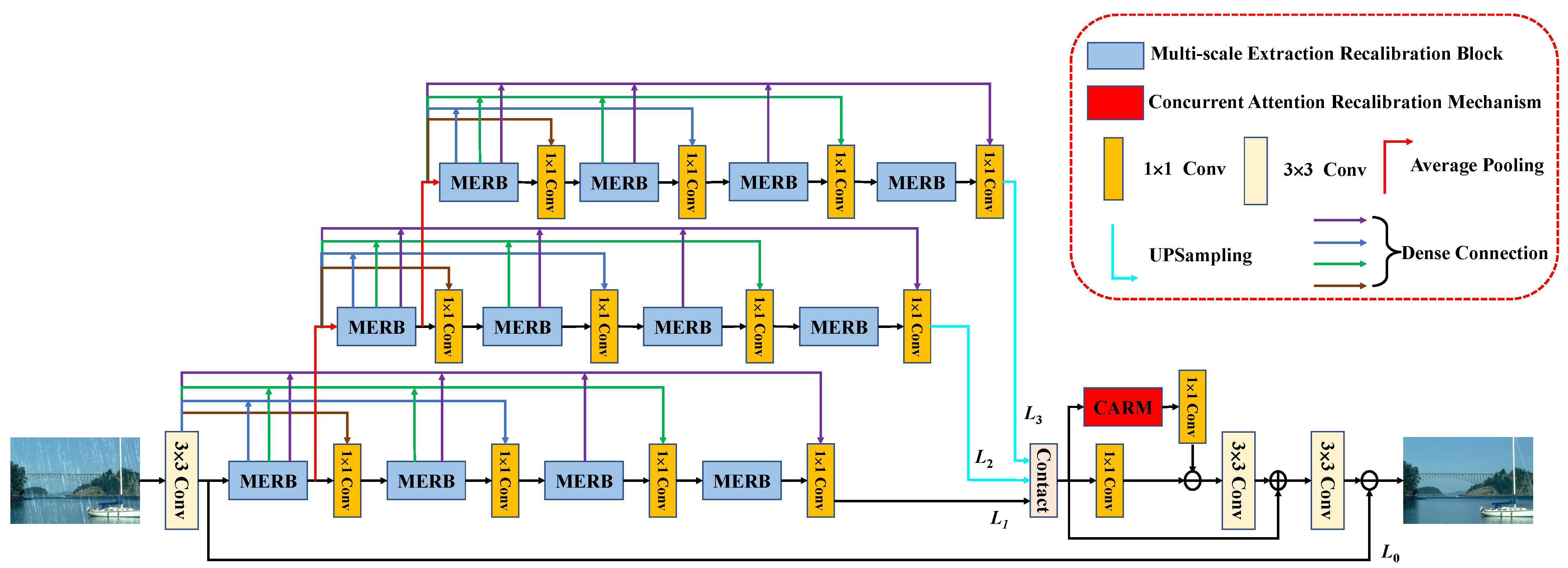
- We propose an SFR-Net based on densely connected multi-scale feature fusion to accomplish single image deraining. Its network architecture can learn richer image feature representations efficiently, from coarse to fine features.
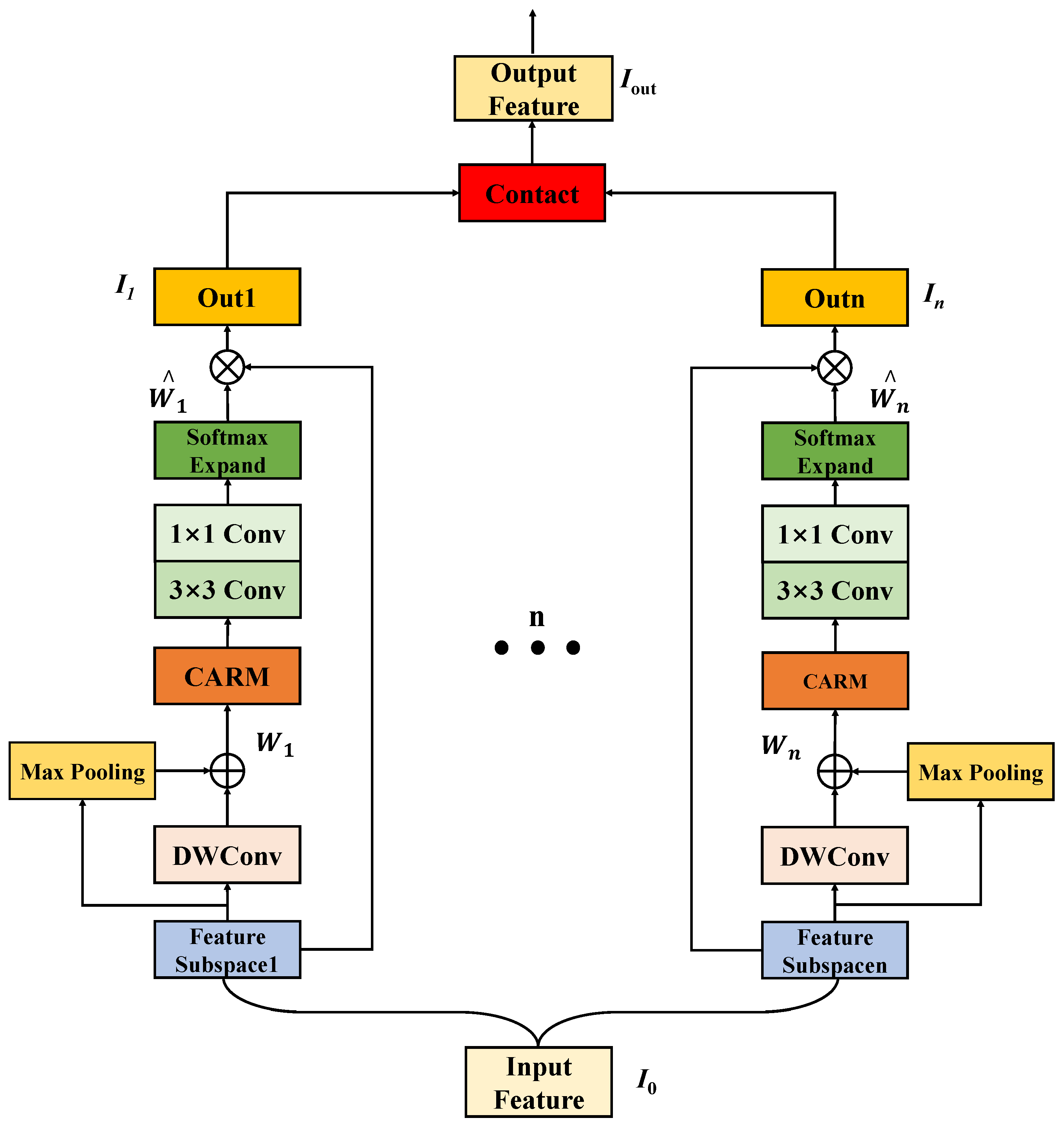
- We propose CARM and SCAM, where CARM collects cross-channel and significant location feature information along the X and Y spatial directions, respectively. SCAM combines CARM and the Subspace Attention Mechanism (SAM) to recalibrate rain streaks features and reduce useless feature information transfers. The CARM and SCAM are designed to help the network retain spatial and background detail information better.
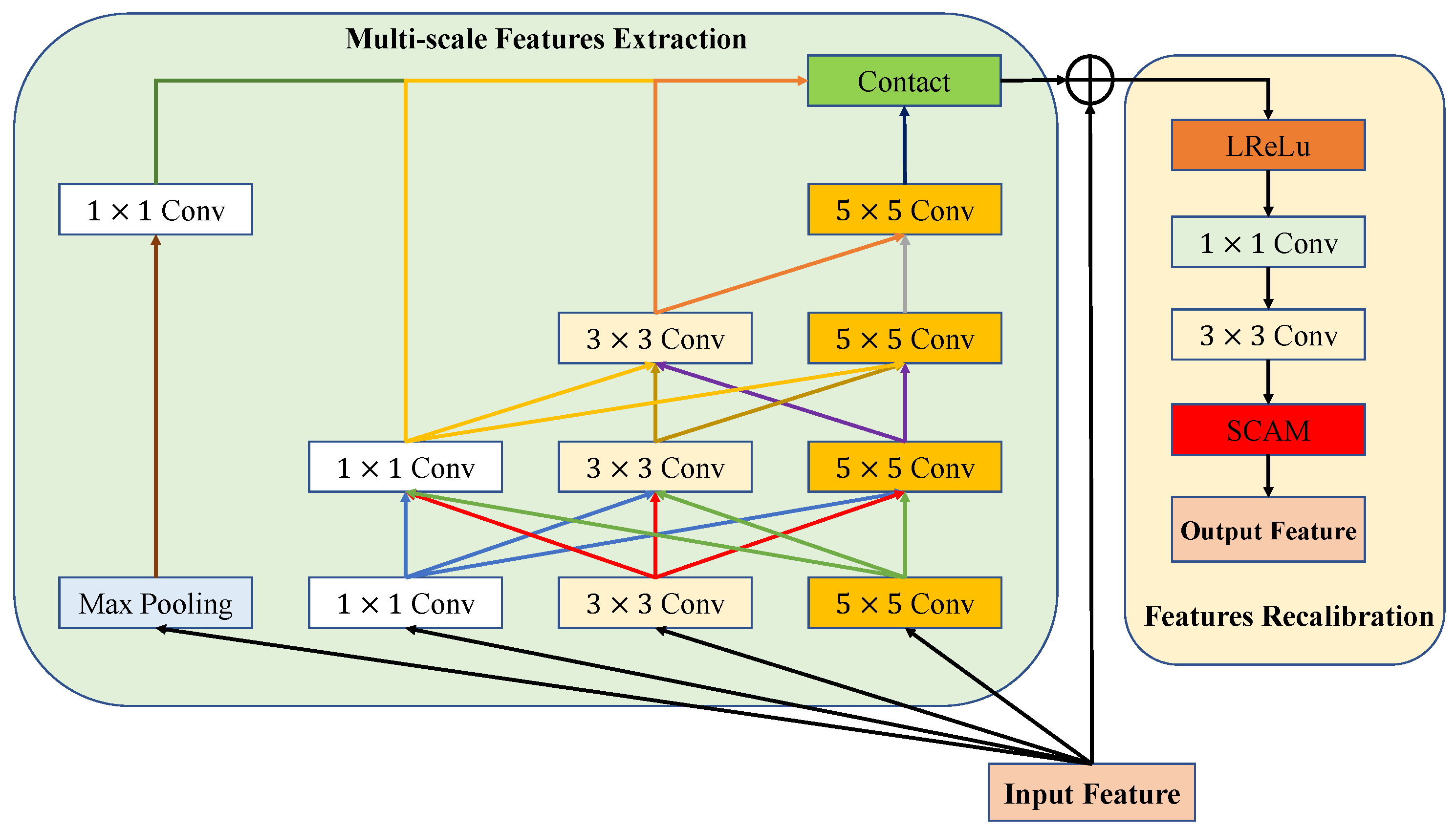
- We propose an MERB. The MERB uses dilated convolutions of different scales to extract feature information at different scales and fuses this information using Across–Up connection and Across–Down connection. The SCAM is placed in MERB after feature stitching to enable it to learn feature information better from the original image.
2. Related Work
2.1. Single Image Deraining
2.2. Multi-Scale Learning
3. Proposed Method
3.1. The Framework of SFR-Net
3.2. Subspace Coordinate Attention Mechanism
3.3. Multi-Scale Extraction Recalibration Block
3.4. Loss Function
4. Experiments
4.1. Experimental Settings
4.1.1. Datasets Setup
4.1.2. Evaluation Metrics
4.1.3. Implementation Details
4.2. Experimental Results
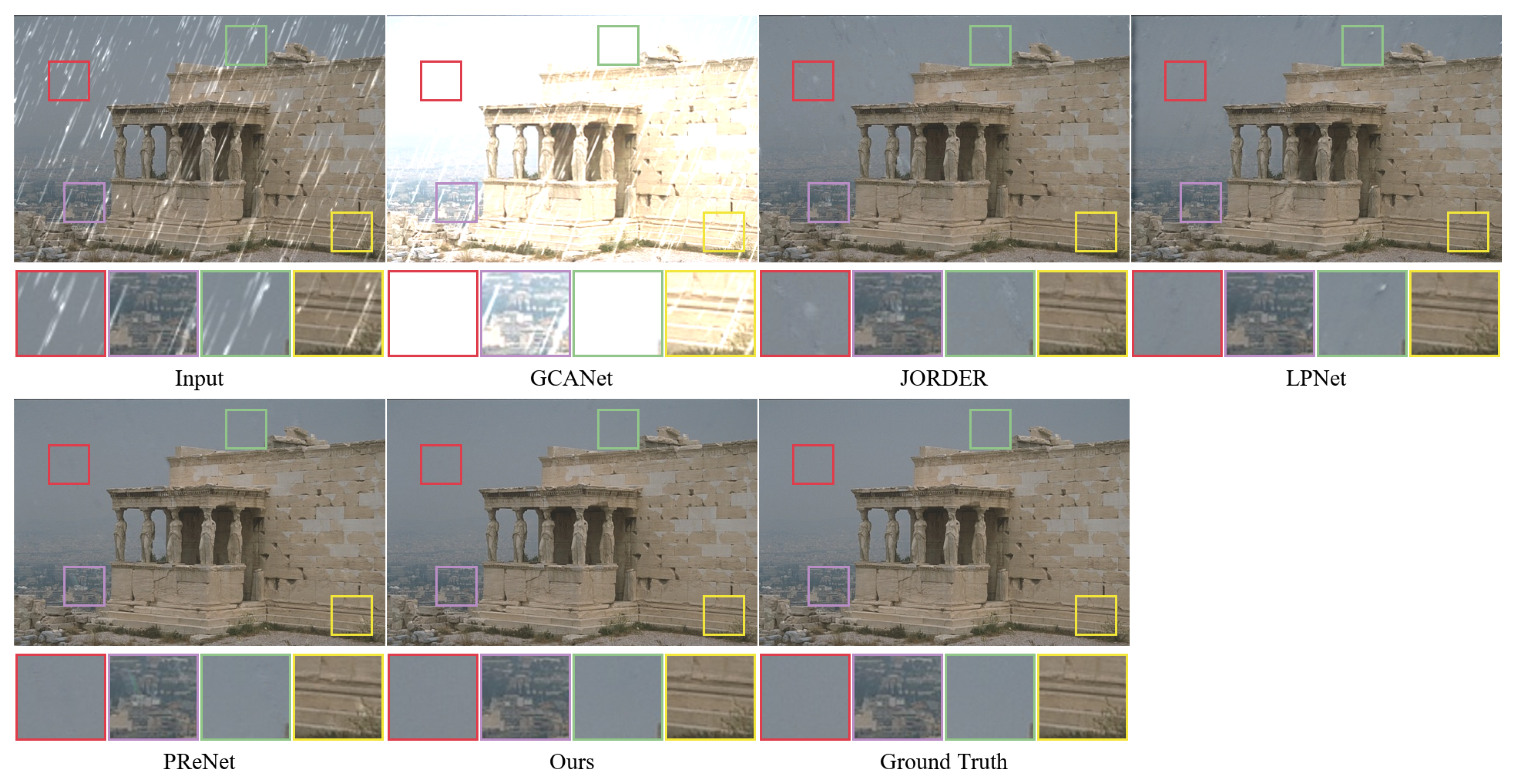
4.2.1. Results on Synthetic Datasets
4.2.2. Results on Real-World Datasets
4.3. Ablation Studies
4.3.1. Ablation Study for the Proposed Scam
4.3.2. Ablation Study of the Number of SCAM Subspaces
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fu, X.; Huang, J.; Zeng, D.; Huang, Y.; Ding, X.; Paisley, J. Removing rain from single images via a deep detail network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 June 2017; pp. 3855–3863. [Google Scholar]
- Yang, W.; Tan, R.T.; Feng, J.; Guo, Z.; Yan, S.; Liu, J. Joint rain detection and removal from a single image with contextualized deep networks. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 1377–1393. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Shu, N.; Tang, Q.; Zhang, W. Computational Model Based on Neural Network of Visual Cortex for Human Action Recognition. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 1427–1440. [Google Scholar] [CrossRef] [PubMed]
- Gu, S.; Meng, D.; Zuo, W.; Zhang, L. Joint Convolutional Analysis and Synthesis Sparse Representation for Single Image Layer Separation. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 1717–1725. [Google Scholar]
- Li, Y.; Tan, R.T.; Guo, X.; Lu, J.; Brown, M.S. Rain streak removal using layer priors. In Proceedings of the IEEE conference on computer vision and pattern recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2736–2744. [Google Scholar]
- Luo, Y.; Xu, Y.; Ji, H. Removing rain from a single image via discriminative sparse coding. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 3397–3405. [Google Scholar]
- Zhang, X.; Li, H.; Qi, Y.; Leow, W.K.; Ng, T.K. Rain removal in video by combining temporal and chromatic properties. In Proceedings of the IEEE International Conference on Multimedia and Expo, Toronto, ON, Canada, 26 December 2006; pp. 461–464. [Google Scholar]
- Kim, J.H.; Lee, C.; Sim, J.Y.; Kim, C.S. Single-image deraining using an adaptive nonlocal means filter. In Proceedings of the IEEE International Conference on Image Processing, Melbourne, VIC, Australia, 15–18 September 2013; pp. 914–917. [Google Scholar]
- Kang, L.W.; Lin, C.W.; Fu, Y.H. Automatic single-image-based rain streaks removal via image decomposition. IEEE Trans. Image Process. 2012, 21, 1742–1755. [Google Scholar] [CrossRef] [PubMed]
- Yang, W.; Tan, R.T.; Feng, J.; Liu, J.; Guo, Z.; Yan, S. Deep Joint Rain Detection and Removal from a Single Image. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 June 2017; pp. 1357–1366. [Google Scholar]
- Li, R.; Cheong, L.F.; Tan, R.T. Heavy Rain Image Restoration: Integrating Physics Model and Conditional Adversarial Learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 1633–1642. [Google Scholar]
- Zhang, H.; Sindagi, V.; Patel, V.M. Image De-Raining Using a Conditional Generative Adversarial Network. IEEE Trans. Circuits Syst. Video Technol. 2020, 30, 3943–3956. [Google Scholar] [CrossRef]
- Wei, W.; Meng, D.; Zhao, Q.; Xu, Z.; Wu, Y. Semi-Supervised Transfer Learning for Image Rain Removal. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 3872–3881. [Google Scholar]
- Wei, Y.; Zhang, Z.; Wang, Y.; Xu, M.; Yang, Y.; Yan, S.; Wang, M. Deraincyclegan: Rain attentive cyclegan for single image deraining and rainmaking. IEEE Trans. Image Process. 2021, 30, 4788–4801. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Huang, Y.; Xu, L. Multi-Scale Hourglass Hierarchical Fusion Network for Single Image Deraining. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Nashville, TN, USA, 19–25 June 2021; pp. 872–879. [Google Scholar]
- Wang, Y.T.; Zhao, X.L.; Jiang, T.X.; Deng, L.J.; Chang, Y.; Huang, T.Z. Rain streaks removal for single image via kernel-guided convolutional neural network. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 3664–3676. [Google Scholar] [CrossRef] [PubMed]
- Pan, J.; Liu, S.; Sun, D.; Zhang, J.; Liu, Y.; Ren, J.; Yang, M.H. Learning Dual Convolutional Neural Networks for Low-Level Vision. In Proceedings of the IEEE conference on computer vision and pattern recognition, Honolulu, HI, USA, 21–26 June 2018; pp. 3070–3079. [Google Scholar]
- Li, P.; Jin, J.; Jin, G.; Fan, L.; Gao, X.; Song, T.; Chen, X. Deep Scale-Space Mining Network for Single Image Deraining. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, New Orleans, LA, USA, 19–24 June 2022; pp. 4276–4285. [Google Scholar]
- Zhang, Y.; Liu, Y.; Li, Q.; Wang, J.; Qi, M.; Sun, H.; Xu, H.; Kong, J. A Lightweight Fusion Distillation Network for Image Deblurring and Deraining. Sensors 2021, 21, 5312. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Zhao, W.; Liu, P.; Tang, X. Removing rain and snow in a single image using guided filter. In Proceedings of the IEEE International Conference on Computer Science and Automation Engineering, Zhangjiajie, China, 25–27 May 2012; pp. 304–307. [Google Scholar]
- Zhang, H.; Patel, V.M. Convolutional sparse and low-rank coding-based rain streak removal. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision, Santa Rosa, CA, USA, 24–31 March 2017; pp. 1259–1267. [Google Scholar]
- Ren, D.; Zuo, W.; Hu, Q.; Zhu, P.; Meng, D. Progressive Image Deraining Networks: A Better and Simpler Baseline. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 3932–3941. [Google Scholar]
- Fu, X.; Liang, B.; Huang, Y.; Ding, X.; Paisley, J. Lightweight pyramid networks for image deraining. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 1794–1807. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Wu, J.; Lin, Z.; Liu, H.; Zha, H. Recurrent squeeze-and-excitation context aggregation net for single image deraining. In Proceedings of the European Conference on Computer Vision, Munich, Germany, 8–14 September 2018; pp. 254–269. [Google Scholar]
- Chen, D.; He, M.; Fan, Q.; Liao, J.; Zhang, L.; Hou, D.; Hua, G. Gated Context Aggregation Network for Image Dehazing and Deraining. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 7–11 January 2019; pp. 1375–1383. [Google Scholar]
- Wang, H.; Xie, Q.; Zhao, Q.; Meng, D. A model-driven deep neural network for single image rain removal. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 3100–3109. [Google Scholar]
- Chen, X.; Pan, J.; Jiang, K.; Li, Y.; Huang, Y.; Kong, C.; Fan, Z. Unpaired Deep Image Deraining Using Dual Contrastive Learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 19–24 June 2022; pp. 2017–2026. [Google Scholar]
- Yang, H.-D. Restoring Raindrops Using Attentive Generative Adversarial Networks. Appl. Sci. 2021, 11, 7034. [Google Scholar] [CrossRef]
- Huang, H.; Yu, A.; He, R. Memory oriented transfer learning for semi-supervised image deraining. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 7728–7737. [Google Scholar]
- Yang, W.; Tan, R.T.; Wang, S.; Fang, Y.; Liu, J. Single Image Deraining: From Model-Based to Data-Driven and Beyond. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 4059–4077. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Lu, H. Single image deraining via recurrent hierarchy enhancement network. In Proceedings of the 27th ACM International Conference on Multimedia, Nice, France, 21–25 October 2019; pp. 1814–1822. [Google Scholar]
- Wang, C.; Xing, X.; Wu, Y.; Su, Z.; Chen, J. Dcsfn: Deep cross-scale fusion network for single image rain removal. In Proceedings of the 28th ACM International Conference on Multimedia, Seattle, WA, USA, 12–16 October 2020; pp. 1643–1651. [Google Scholar]
- Jiang, K.; Wang, Z.; Yi, P.; Chen, C.; Huang, B.; Luo, Y.; Jiang, J. Multi-Scale Progressive Fusion Network for Single Image Deraining. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 8343–8352. [Google Scholar]
- Saini, R.; Jha, N.K.; Das, B.; Mittal, S.; Mohan, C.K. Ulsam: Ultra-lightweight subspace attention module for compact convolutional neural networks. In Proceedings of the IEEE Winter Conference on Applications of Computer Vision, Snowmass, CO, USA, 1–5 March 2020; pp. 1616–1625. [Google Scholar]
- Zhu, X.; Cheng, D.; Zhang, Z.; Lin, S.; Dai, J. An empirical study of spatial attention mechanisms in deep networks. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, 27 October–2 November 2019; pp. 6687–6696. [Google Scholar]
- Hou, Q.; Zhou, D.; Feng, J. Coordinate attention for efficient mobile network design. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 13708–13717. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; Gallo, O.; Frosio, I.; Kautz, J. Removing rain and snow in a single image using guided filter. IEEE Trans. Comput. Imaging 2017, 3, 47–57. [Google Scholar] [CrossRef]
- Li, S.; Araujo, I.B.; Ren, W.; Wang, Z.; Tokuda, E.K.; Junior, R.H.; Cesar-Junior, R.; Zhang, J.; Guo, X.; Cao, X. Single image deraining: A comprehensive benchmark analysis. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 3838–3847. [Google Scholar]
- Hu, J.; Shen, L.; Albanie, S.; Sun, G.; Wu, E. Squeeze-and-Excitation Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 2011–2023. [Google Scholar] [CrossRef] [PubMed] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasets | Rain100L | Rain100H | Rain800 | Rain1400 | Li et al. (Scene 1) | Li et al. (Scene 2) |
|---|---|---|---|---|---|---|
| Training Set | 200 | 1800 | 700 | 12,600 | - | - |
| Testing Set | 100 | 100 | 100 | 1400 | 185 | 34 |
| Type | Synthetic | Synthetic | Synthetic | Synthetic | Real-world | Real-world |
| Datasets | Rain100L (PSNR/SSIM) | Rain100H (PSNR/SSIM) | Rain800 (PSNR/SSIM) | Rain1400 (PSNR/SSIM) |
|---|---|---|---|---|
| Rainy | ||||
| GCANet | - | |||
| LPNet | ||||
| RESCAN | ||||
| DDN | − | |||
| JORDER | ||||
| PReNet | ||||
| RCDNet | ||||
| DCD-GAN | ||||
| Ours |
| Framework | CAM | SPM | SAM | CARM | CAM + SAM | SPM + SAM | CARM + SAM |
|---|---|---|---|---|---|---|---|
| PSNR/SSIM | 38.36/0.976 | 38.90/0.980 | 38.08/0.978 | 39.25/0.979 | 39.21/0.981 | 38.86/0.981 |
| Metric | n = 4 | n = 8 (Default) | n = 12 | n = 16 |
|---|---|---|---|---|
| PSNR/SSIM | 39.08/0.9825 | 39.20/0.9827 | 39.11/0.9826 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, P.; Jin, J.; Jin, G.; Fan, L. Scale-Space Feature Recalibration Network for Single Image Deraining. Sensors 2022, 22, 6823. https://doi.org/10.3390/s22186823
Li P, Jin J, Jin G, Fan L. Scale-Space Feature Recalibration Network for Single Image Deraining. Sensors. 2022; 22(18):6823. https://doi.org/10.3390/s22186823
Chicago/Turabian StyleLi, Pengpeng, Jiyu Jin, Guiyue Jin, and Lei Fan. 2022. "Scale-Space Feature Recalibration Network for Single Image Deraining" Sensors 22, no. 18: 6823. https://doi.org/10.3390/s22186823
APA StyleLi, P., Jin, J., Jin, G., & Fan, L. (2022). Scale-Space Feature Recalibration Network for Single Image Deraining. Sensors, 22(18), 6823. https://doi.org/10.3390/s22186823