
PhotoElasticFinger: Robot Tactile Fingertip Based on Photoelastic Effect
 , , and
, , and 
Abstract
1. Introduction
2. Principle and Methodology
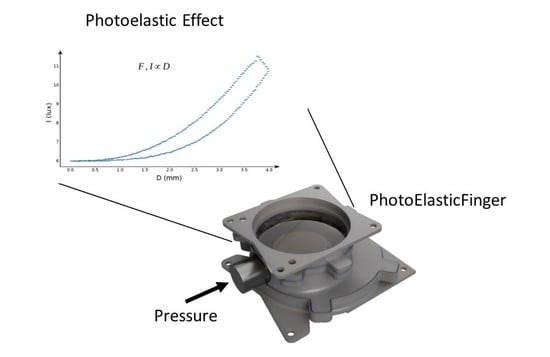
2.1. Photoelasticity for Sensing
2.2. Design and Fabrication
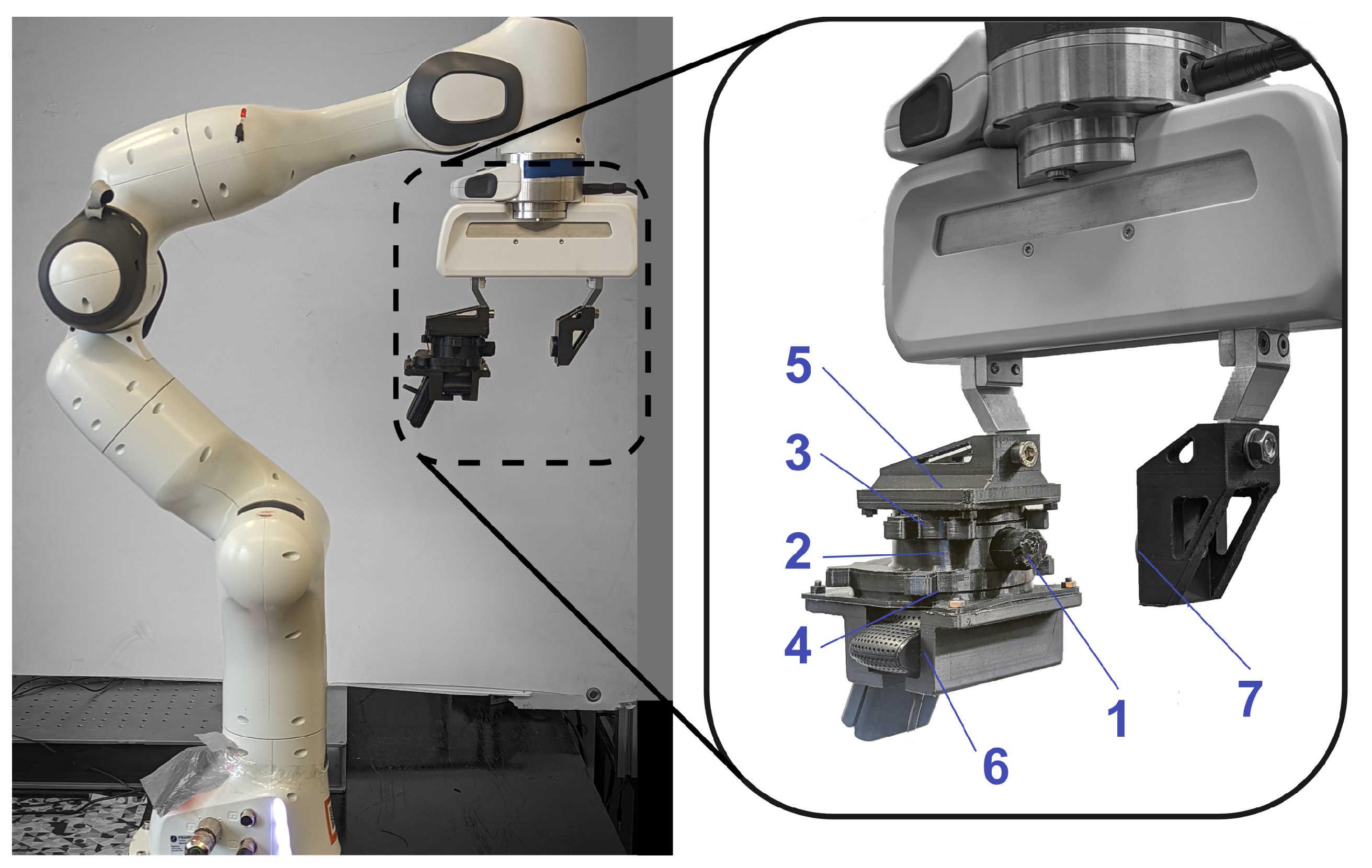
2.3. System Description
3. Results and Discussions
3.1. Calibration
3.2. Force Sensing
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Photoelastic Effect Description
Appendix A.1. Photoelasticity Theory

Appendix A.2. The Details of the Numerical Simulation
Appendix A.3. Hysteresis without Quasi-Static Assumption

Appendix B. Exploded View of the PhotoElasticFingertip

References
- Lumpkin, E.A.; Caterina, M.J. Mechanisms of sensory transduction in the skin. Nature 2007, 445, 858–865. [Google Scholar] [CrossRef] [PubMed]
- Prescott, T.J.; Lepora, N.; Mitchinson, B.; Pearson, M.; Martinez-Hernandez, U.; Grant, R.A. Active Touch Sensing in Mammals and Robots. In The Senses: A Comprehensive Reference, 2nd ed.; Fritzsch, B., Ed.; Elsevier: Oxford, UK, 2020; pp. 79–109. [Google Scholar]
- Kappassov, Z. Active Manipulation. In Encyclopedia of Robotics; Ang, M.H., Khatib, O., Siciliano, B., Eds.; Springer: Berlin/Heidelberg, Germany, 2020; pp. 1–10. [Google Scholar]
- Martinez-Hernandez, U.; Metcalfe, B.; Assaf, T.; Jabban, L.; Male, J.; Zhang, D. Wearable Assistive Robotics: A Perspective on Current Challenges and Future Trends. Sensors 2021, 21, 6751. [Google Scholar] [CrossRef] [PubMed]
- Kappassov, Z.; Corrales, J.A.; Perdereau, V. Tactile sensing in dexterous robot hands: Review. Robot. Auton. Syst. 2015, 74, 195–220. [Google Scholar] [CrossRef]
- Drimus, A.; Kootstra, G.; Bilberg, A.; Kragic, D. Design of a flexible tactile sensor for classification of rigid and deformable objects. Robot. Auton. Syst. 2014, 62, 3–15. [Google Scholar] [CrossRef]
- Kaltenbrunner, M.; Sekitani, T.; Reeder, J.; Yokota, T.; Kuribara, K.; Tokuhara, T.; Drack, M.; Schwödiauer, R.; Graz, I.; Bauer-Gogonea, S.; et al. An ultra-lightweight design for imperceptible plastic electronics. Nature 2013, 499, 458–463. [Google Scholar] [CrossRef]
- Tomo, T.P.; Regoli, M.; Schmitz, A.; Natale, L.; Kristanto, H.; Somlor, S.; Jamone, L.; Metta, G.; Sugano, S. A New Silicone Structure for uSkin—A Soft, Distributed, Digital 3-Axis Skin Sensor and Its Integration on the Humanoid Robot iCub. IEEE Robot. Autom. Lett. 2018, 3, 2584–2591. [Google Scholar] [CrossRef]
- Massalim, Y.; Kappassov, Z.; Varol, H.A.; Hayward, V. Robust Detection of Absence of Slip in Robot Hands and Feet. IEEE Sens. J. 2021, 21, 27897–27904. [Google Scholar] [CrossRef]
- Neto, M.; Ribeiro, P.; Nunes, R.; Jamone, L.; Bernardino, A.; Cardoso, S. A Soft Tactile Sensor Based on Magnetics and Hybrid Flexible-Rigid Electronics. Sensors 2021, 21, 5098. [Google Scholar] [CrossRef]
- Galimzhanov, T.; Zhakatayev, A.; Kashapov, R.; Kappassov, Z.; Varol, H.A. Linear Negative Stiffness Honeycomb Actuator with Integrated Force Sensing. In Proceedings of the 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Boston, MA, USA, 7–10 July 2020; pp. 1589–1594. [Google Scholar]
- Shimonomura, K. Tactile Image Sensors Employing Camera: A Review. Sensors 2019, 19, 3933. [Google Scholar] [CrossRef]
- Yamaguchi, A.; Atkeson, C.G. Recent progress in tactile sensing and sensors for robotic manipulation: Can we turn tactile sensing into vision? Adv. Robot. 2019, 33, 661–673. [Google Scholar] [CrossRef]
- Lepora, N.F.; Lin, Y.; Money-Coomes, B.; Lloyd, J. DigiTac: A DIGIT-TacTip Hybrid Tactile Sensor for Comparing Low-Cost High-Resolution Robot Touch. IEEE Robot. Autom. Lett. 2022, 7, 9382–9388. [Google Scholar] [CrossRef]
- Torres-Jara, E.; Natale, L. Sensitive Manipulation: Manipulation Through Tactile Feedback. Int. J. Hum. Robot. 2018, 15, 1850012. [Google Scholar] [CrossRef]
- Anil, A.G.; Martinez-Hernandez, U. A Low-Cost Compact Soft Tactile Sensor with a Multimodal Chip. In Proceedings of the 2021 20th International Conference on Advanced Robotics (ICAR), Ljubljana, Slovenia, 6–10 December 2021; pp. 13–18. [Google Scholar]
- Dawood, A.B.; Godaba, H.; Ataka, A.; Althoefer, K. Silicone-based Capacitive E-skin for Exteroception and Proprioception. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24–30 October 2020; pp. 8951–8956. [Google Scholar]
- Yun, S.; Park, S.; Park, B.; Kim, Y.; Park, S.K.; Nam, S.; Kyung, K.U. Polymer-waveguide-based flexible tactile sensor array for dynamic response. Adv. Mater. 2014, 26, 4474–4480. [Google Scholar] [CrossRef] [PubMed]
- Zhao, H.; O’Brien, K.; Li, S.; Shepherd, R.F. Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides. Sci. Robot. 2016, 1, eaai7529. [Google Scholar] [CrossRef]
- Yuan, W.; Dong, S.; Adelson, E.H. GelSight: High-Resolution Robot Tactile Sensors for Estimating Geometry and Force. Sensors 2017, 17, 2762. [Google Scholar] [CrossRef]
- Ward-Cherrier, B.; Pestell, N.; Lepora, N.F. NeuroTac: A Neuromorphic Optical Tactile Sensor applied to Texture Recognition. In Proceedings of the IEEE International Conference on Robotics and Automation, Paris, France, 17–21 May 2020; pp. 2654–2660. [Google Scholar]
- Hughes, D.; Lammie, J.; Correll, N. A Robotic Skin for Collision Avoidance and Affective Touch Recognition. IEEE Robot. Autom. Lett. 2018, 3, 1386–1393. [Google Scholar] [CrossRef]
- James, J.W.; Church, A.; Cramphorn, L.; Lepora, N.F. Tactile Model O: Fabrication and Testing of a 3D-Printed, Three-Fingered Tactile Robot Hand. Soft Robot. 2021, 8, 594–610. [Google Scholar] [CrossRef]
- Gomes, D.F.; Paoletti, P.; Luo, S. Generation of GelSight Tactile Images for Sim2Real Learning. IEEE Robot. Autom. Lett. 2021, 6, 4177–4184. [Google Scholar] [CrossRef]
- Baimukashev, D.; Kappassov, Z.; Varol, H.A. Shear, Torsion and Pressure Tactile Sensor via Plastic Optofiber Guided Imaging. IEEE Robot. Autom. Lett. 2020, 5, 2618–2625. [Google Scholar] [CrossRef]
- Scharff, R.B.; Boonstra, D.J.; Willemet, L.; Lin, X.; Wiertlewski, M. Rapid manufacturing of color-based hemispherical soft tactile fingertips. In Proceedings of the 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), Yokohama, Japan, 16 April 2022; pp. 896–902. [Google Scholar]
- Kappassov, Z.; Baimukashev, D.; Kuanyshuly, Z.; Massalin, Y.; Urazbayev, A.; Varol, H.A. Color-Coded Fiber-Optic Tactile Sensor for an Elastomeric Robot Skin. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 2146–2152. [Google Scholar]
- Bertholds, A.; Dändliker, R. High-resolution photoelastic pressure sensor using low-birefringence fiber. Appl. Opt. 1986, 25, 340–343. [Google Scholar] [CrossRef]
- Dubey, V.N.; Crowder, R.M. A dynamic tactile sensor on photoelastic effect. Sens. Actuators A Phys. 2006, 128, 217–224. [Google Scholar] [CrossRef][Green Version]
- Dubey, V.; Grewal, G.; Claremont, D. Load extraction from photoelastic images using neural networks. Exp. Mech. 2007, 47, 263–270. [Google Scholar] [CrossRef]
- Chung, D.; Merat, F.L.; Discenzo, F.M.; Harris, J.S. Neural net based torque sensor using birefringent materials. Sens. Actuators A Phys. 1998, 70, 243–249. [Google Scholar] [CrossRef]
- Kollmer, J.E.; Daniels, K.E. Betweenness centrality as predictor for forces in granular packings. Soft Matter 2019, 15, 1793–1798. [Google Scholar] [CrossRef] [PubMed]
- Dubey, V.N.; Grewal, G.S. Efficacy of photoelasticity in developing whole-field imaging sensors. Opt. Lasers Eng. 2010, 48, 288–294. [Google Scholar] [CrossRef]
- Sato, T.; Mamiya, H.; Koike, H.; Fukuchi, K. PhotoelasticTouch: Transparent rubbery tangible interface using an LCD and photoelasticity. In Proceedings of the 22nd Annual ACM Symposium on User Interface Software and Technology, Victoria, BC, Canada, 4–7 October 2009; pp. 43–50. [Google Scholar]
- Abed Zadeh, A.; Barés, J.; Brzinski, T.A.; Daniels, K.E.; Dijksman, J.; Docquier, N.; Everitt, H.O.; Kollmer, J.E.; Lantsoght, O.; Wang, D.; et al. Enlightening force chains: A review of photoelasticimetry in granular matter. Granul. Matter 2019, 21, 1–12. [Google Scholar] [CrossRef]
- Ren, J.; Dijksman, J.A.; Behringer, R.P. Reynolds pressure and relaxation in a sheared granular system. Phys. Rev. Lett. 2013, 110, 018302. [Google Scholar] [CrossRef]
- Mitsuzuka, M.; Kinbara, Y.; Fukuhara, M.; Nakahara, M.; Nakano, T.; Takarada, J.; Wang, Z.; Mori, Y.; Kageoka, M.; Tawa, T.; et al. Relationship between photoelasticity of polyurethane and dielectric anisotropy of diisocyanate, and application of high-photoelasticity polyurethane to tactile sensor for robot hands. Polymers 2020, 13, 143. [Google Scholar] [CrossRef]
- Daniels, K.E.; Kollmer, J.E.; Puckett, J.G. Photoelastic force measurements in granular materials. Rev. Sci. Instrum. 2017, 88, 051808. [Google Scholar] [CrossRef]
- Mehta, S.; Patel, A.; Mehta, J. CCD or CMOS Image sensor for photography. In Proceedings of the 2015 International Conference on Communications and Signal Processing (ICCSP), Melmaruvathur, India, 2–4 April 2015; pp. 0291–0294. [Google Scholar]
- Eason, E.V.; Hawkes, E.W.; Windheim, M.; Christensen, D.L.; Libby, T.; Cutkosky, M.R. Stress distribution and contact area measurements of a gecko toe using a high-resolution tactile sensor. Bioinspiration Biomim. 2015, 10, 016013. [Google Scholar] [CrossRef]
- Barés, J.; Wang, D.; Wang, D.; Bertrand, T.; O’Hern, C.S.; Behringer, R.P. Local and global avalanches in a two-dimensional sheared granular medium. Phys. Rev. E 2017, 96, 052902. [Google Scholar] [CrossRef] [PubMed]
- Kappassov, Z.; Baimukashev, D.; Adiyatov, O.; Salakchinov, S.; Massalin, Y.; Varol, H.A. A Series Elastic Tactile Sensing Array for Tactile Exploration of Deformable and Rigid Objects. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 520–525. [Google Scholar]
- Kappassov, Z.; Corrales-Ramon, J.A.; Perdereau, V. Simulation of tactile sensing arrays for physical interaction tasks. In Proceedings of the 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Boston, MA, USA, 7–10 July 2020; pp. 196–201. [Google Scholar]
- Levine, S.; Finn, C.; Darrell, T.; Abbeel, P. End-to-end training of deep visuomotor policies. J. Mach. Learn. Res. 2016, 17, 1334–1373. [Google Scholar]
- Kyberd, P.J.; Findlayson, D.; Jayasuriya, M.; Chibante, F. A Strengthened and Sensorised Custom Silicone Glove for use with an Intelligent Prosthetic Hand. Med Eng. Phys. 2022, 107, 103845. [Google Scholar] [CrossRef] [PubMed]
- Kondratenko, Y.; Atamanyuk, I.; Sidenko, I.; Kondratenko, G.; Sichevskyi, S. Machine Learning Techniques for Increasing Efficiency of the Robot’s Sensor and Control Information Processing. Sensors 2022, 22, 1062. [Google Scholar] [CrossRef] [PubMed]
- Martinez-Hernandez, U.; Rubio-Solis, A.; Prescott, T.J. Learning from sensory predictions for autonomous and adaptive exploration of object shape with a tactile robot. Neurocomputing 2020, 382, 127–139. [Google Scholar] [CrossRef]
- Wilson, E.D.; Assaf, T.; Rossiter, J.M.; Dean, P.; Porrill, J.; Anderson, S.R.; Pearson, M.J. A multizone cerebellar chip for bioinspired adaptive robot control and sensorimotor processing. J. R. Soc. Interface 2021, 18, 20200750. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PhotoElasticFinger | Magnetic | Optical | Piezoelectric | ||
|---|---|---|---|---|---|
| [42] | [10] | [25] | [43] | ||
| 1 | 0.5 N | 0.2 N | 0.1 N | 0.62 N | 0.2 N |
| 2 | 0.5–8 N | 0.8 –5 N | 0.1–5 N | 0.62–8 N | 0.2–2 N |
| 3 | 5 mm | 8 mm | 1 mm | 3 mm | 1 mm |
| 4 | 12% | - | - | 9.5% | 50% |
| 5 | approx. 20 Hz | 1 kHz | 0.04–2 kHz | 20 Hz | 230–800 fps |
| 6 | approx. 2 Hz | 0.5 kHz | - | 4 Hz | - |
| 7 | 1.77 | 81 | 0.015 | 9.62 | 4.25 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mukashev, D.; Zhuzbay, N.; Koshkinbayeva, A.; Orazbayev, B.; Kappassov, Z. PhotoElasticFinger: Robot Tactile Fingertip Based on Photoelastic Effect. Sensors 2022, 22, 6807. https://doi.org/10.3390/s22186807
Mukashev D, Zhuzbay N, Koshkinbayeva A, Orazbayev B, Kappassov Z. PhotoElasticFinger: Robot Tactile Fingertip Based on Photoelastic Effect. Sensors. 2022; 22(18):6807. https://doi.org/10.3390/s22186807
Chicago/Turabian StyleMukashev, Dinmukhammed, Nurdaulet Zhuzbay, Ainur Koshkinbayeva, Bakhtiyar Orazbayev, and Zhanat Kappassov. 2022. "PhotoElasticFinger: Robot Tactile Fingertip Based on Photoelastic Effect" Sensors 22, no. 18: 6807. https://doi.org/10.3390/s22186807
APA StyleMukashev, D., Zhuzbay, N., Koshkinbayeva, A., Orazbayev, B., & Kappassov, Z. (2022). PhotoElasticFinger: Robot Tactile Fingertip Based on Photoelastic Effect. Sensors, 22(18), 6807. https://doi.org/10.3390/s22186807