
VibroTouch: Active Tactile Sensor for Contact Detection and Force Sensing via Vibrations


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
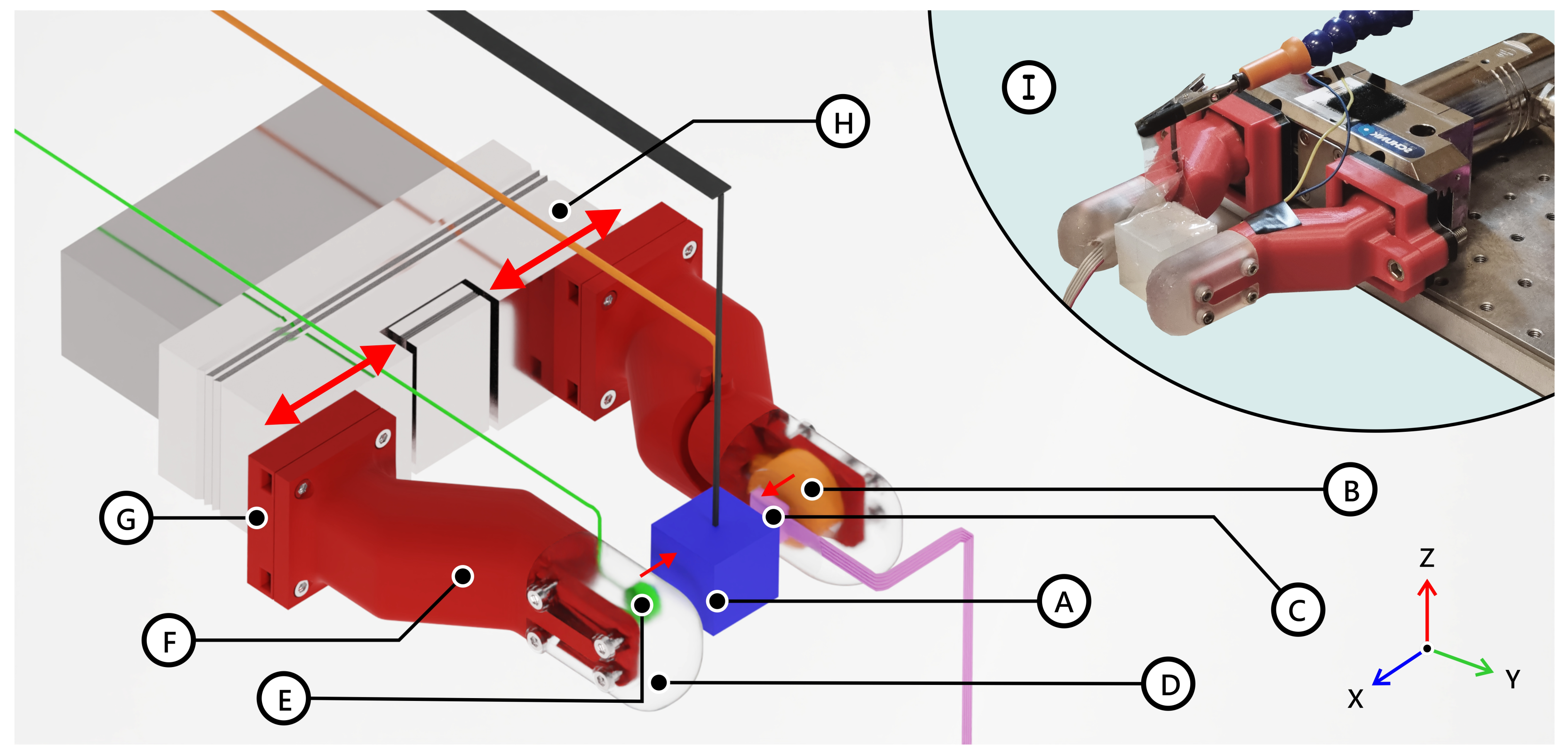
2.1. Active Vibration Tactile Sensor
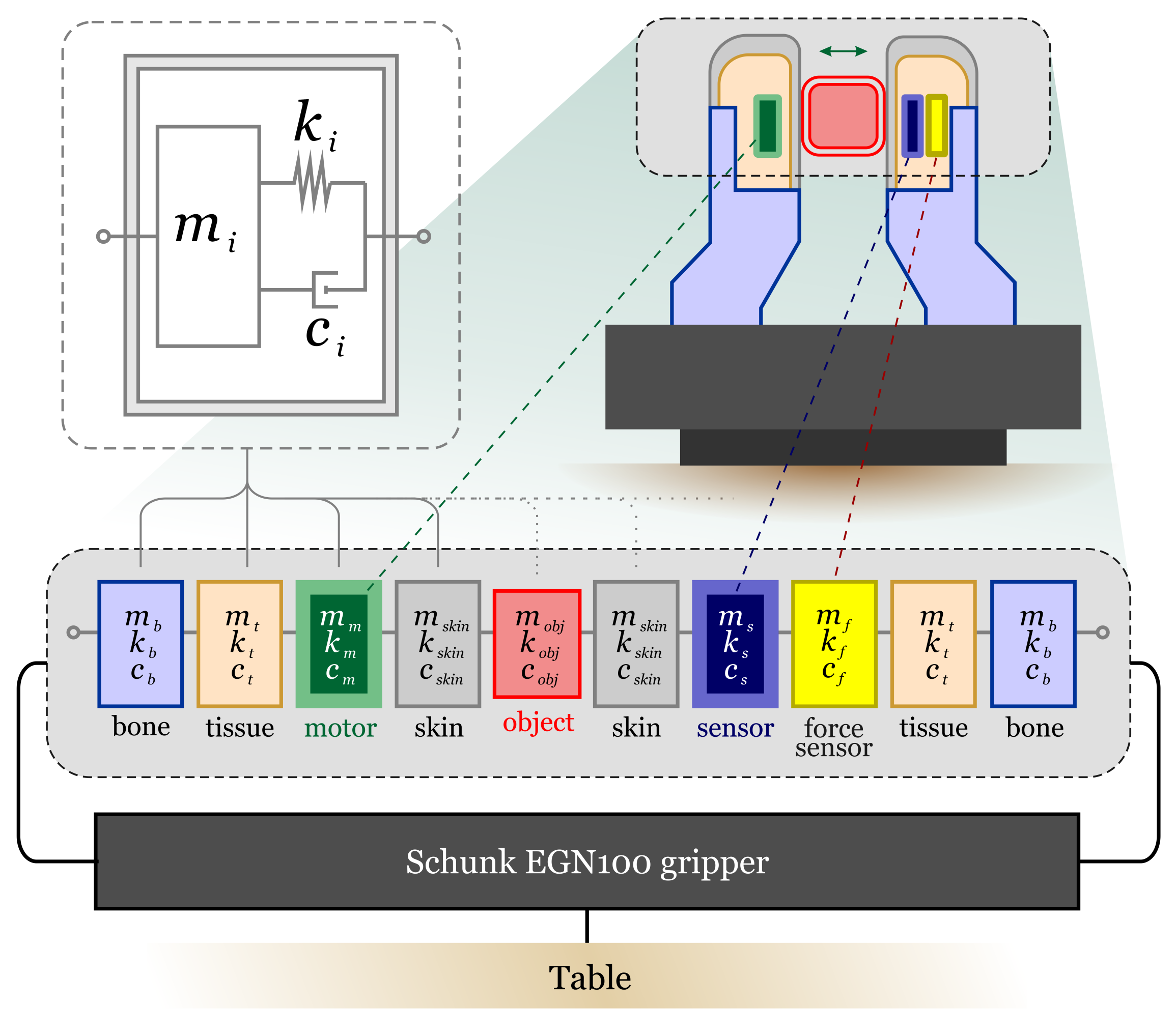
2.2. Lumped-Element Model of Robot Hand Gripper
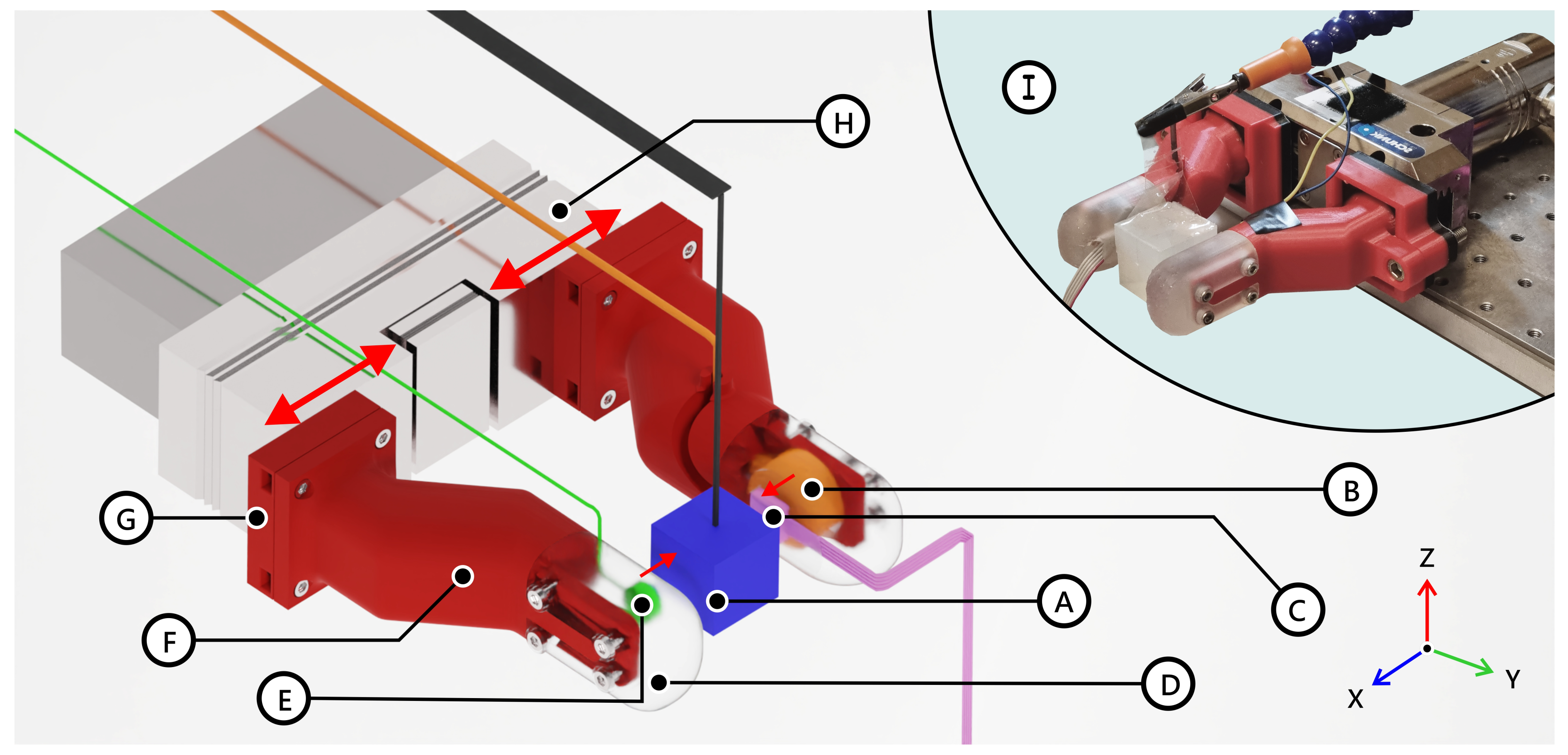
2.3. Experimental Setup
2.4. Spectral Analysis Algorithms for Contact Event Detection
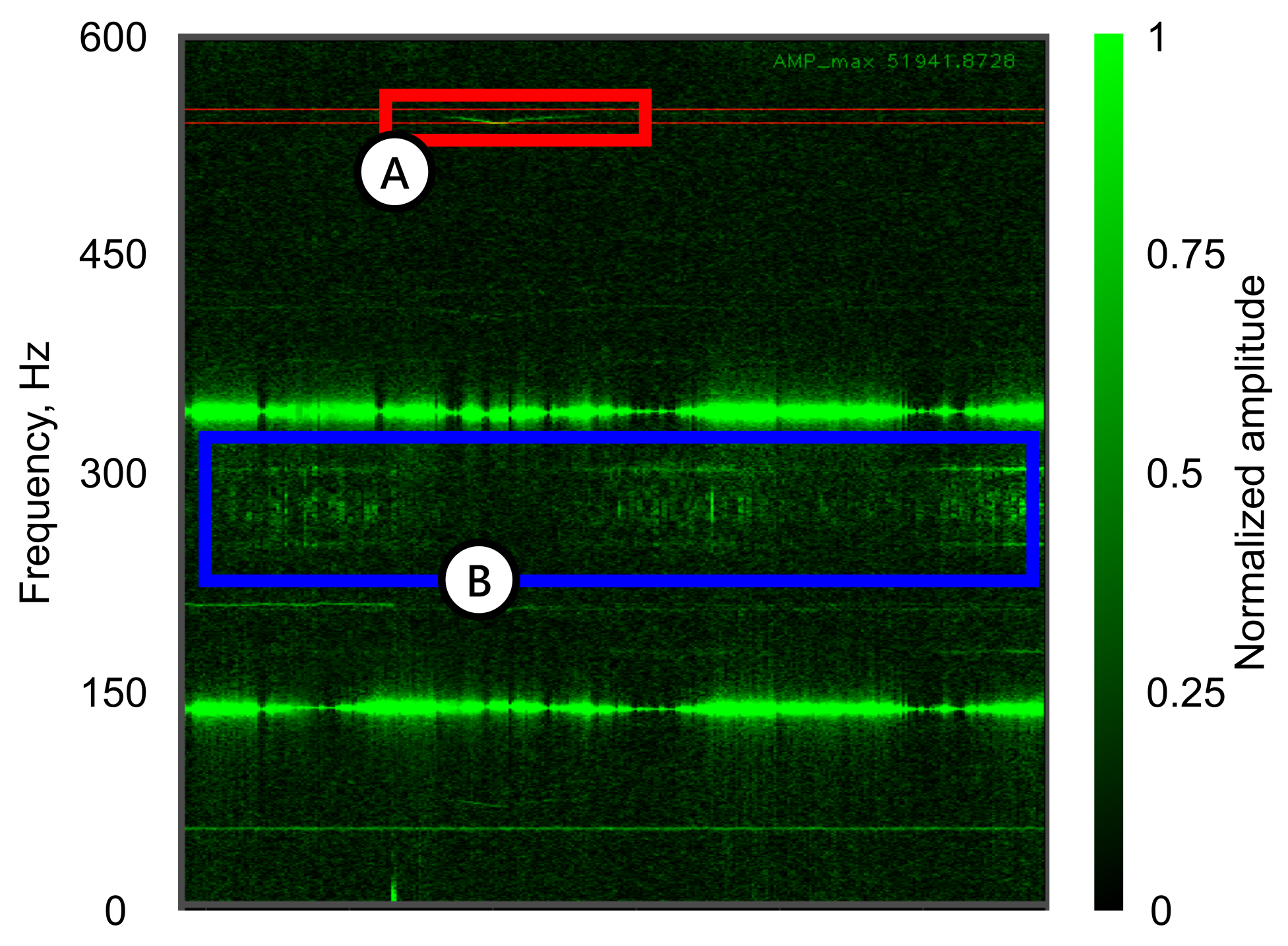
2.4.1. Gripper–Object Contact Detection
- 1.
- The gripper’s fingers close the gap between them with a speed of 0.01 mm/s due to the limiting maximum sampling frequency (≈30 Hz) of obtaining a proper gripper position. The dimensions of an experimental cube (side length of 17.65 mm) were used as a guide for controlling gripper displacement, with the gripper’s initial separation slightly wider than the object’s width. Therefore, the range of gripper displacement is from 0 mm to the position of the approximate dimensions of the object (where touch is supposed to happen). Hence, the maximum distance traveled by fingers is equal to 2.35 mm;
- 2.
- During this light-squeeze movement performed by the gripper, GUI collects the data from the force sensor and resonant peak amplitude changes in a specific bandwidth, actual gripper position, and touch event signal;
- 3.
- The same procedure is repeated 10 times to ensure the repeatability of the experiment, sensor’s high sensitivity, and high accuracy rate (≈90%), with corresponding post-processing of data (averages, standard deviations, etc.).
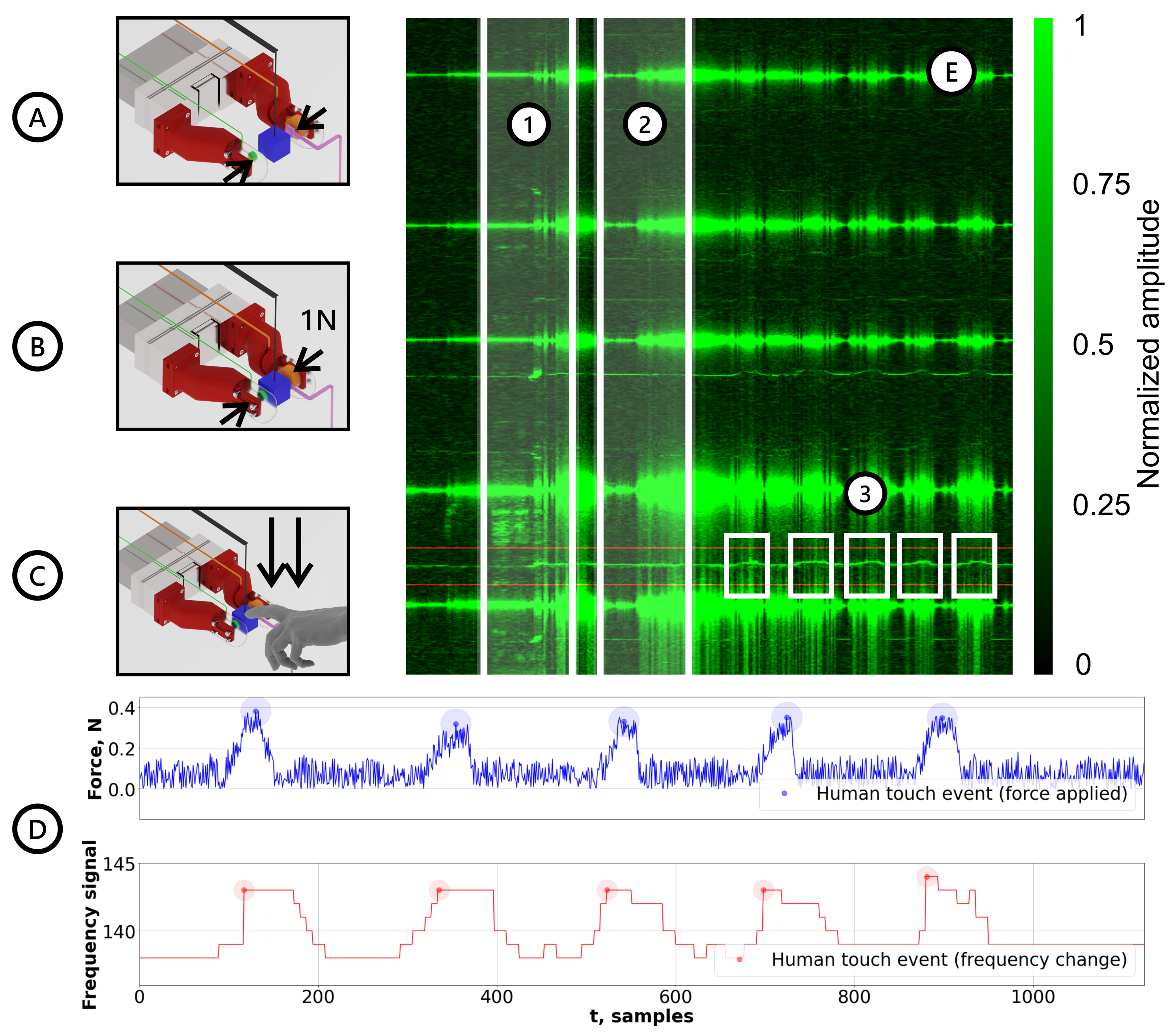
2.4.2. Grasped Object–Human Contact Detection
- 1.
- Establishing the grip with a force of 1 N along the z-axis (Figure 6B) using force control with the feedback provided by HEX21;
- 2.
- Beginning data acquisition: collect synchronously peak frequency from the specified frequency range and force along the y-axis;
- 3.
- A human or an external stimulus enters the system by applying pressure on the object along the y-axis 5 times (Figure 6C).
3. Results
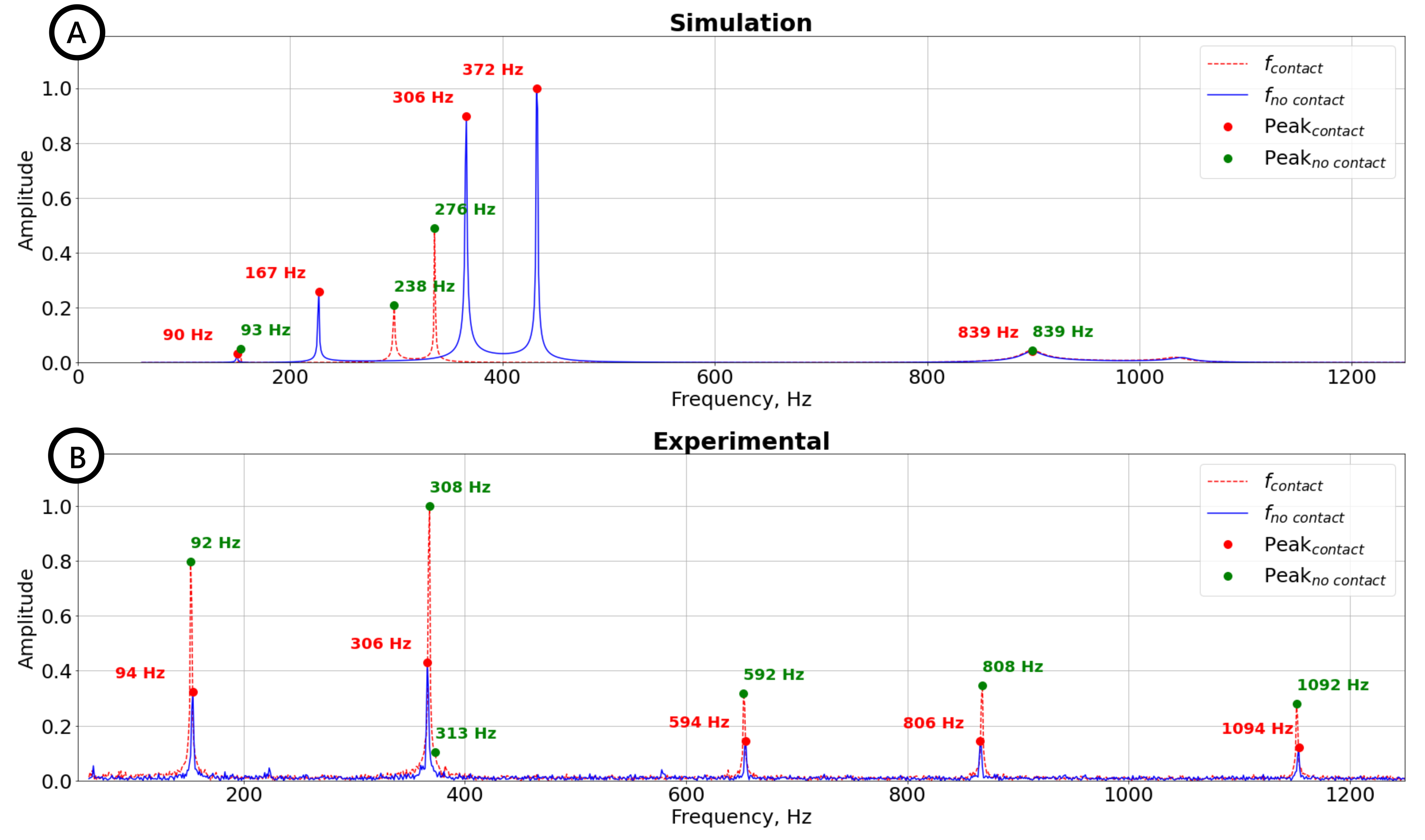
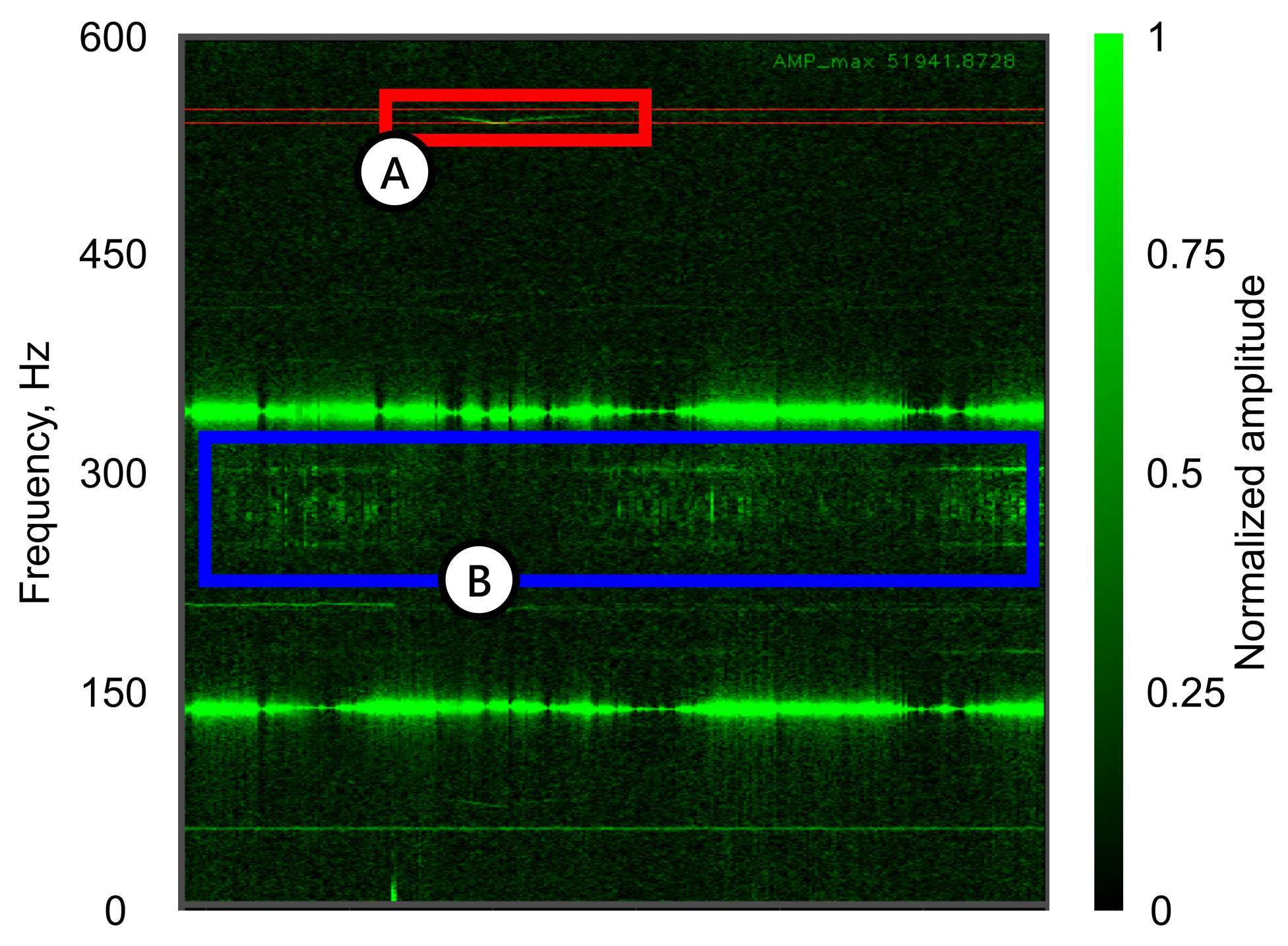
3.1. Gripper–Object Contact Detection
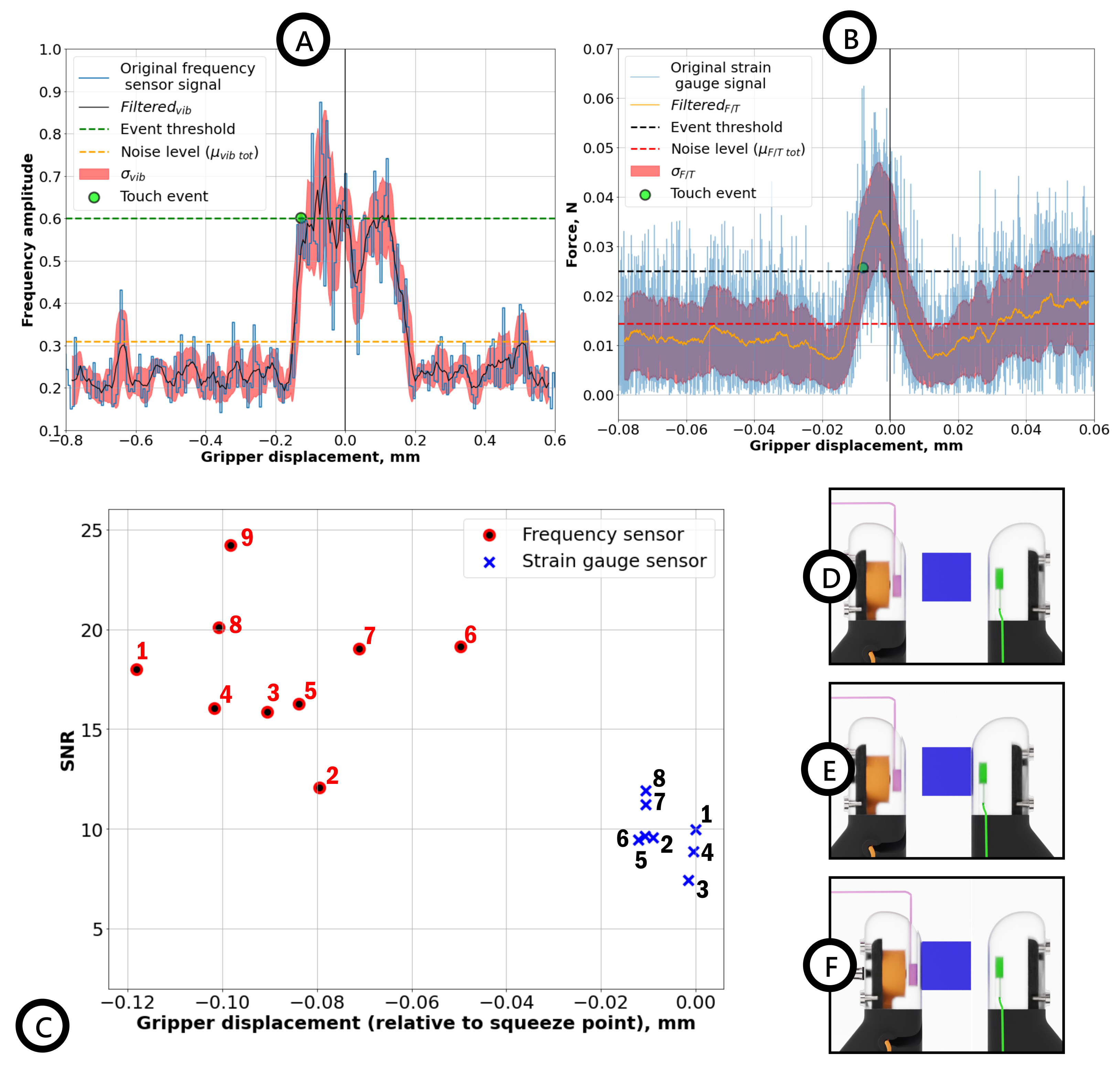
3.2. Grasped Object–Human Contact Detection
4. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hutchings, I.M. Leonardo da Vinci’s studies of friction. Wear 2016, 360–361, 51–66. [Google Scholar] [CrossRef]
- Salisbury, J.K.; Craig, J.J. Articulated Hands: Force Control and Kinematic Issues. Int. J. Robot. Res. 1982, 1, 4–17. [Google Scholar] [CrossRef]
- Bicchi, A. On the form-closure property of robotic grasping. IFAC Proc. Vol. 1994, 27, 219–224. [Google Scholar] [CrossRef]
- Montana, D.J. The kinematics of contact and grasp. Int. J. Robot. Res. 1988, 7, 17–32. [Google Scholar] [CrossRef]
- Eberman, B.; Salisbury, J.K. Application of Change Detection to Dynamic Contact Sensing. Int. J. Robot. Res. 1994, 13, 369–394. [Google Scholar] [CrossRef]
- Robles-De-La-Torre, G.; Hayward, V. Force can overcome object geometry in the perception of shape through active touch. Nature 2001, 412, 445. [Google Scholar] [CrossRef]
- Lederman, S.J.; Klatzky, R.L. Hand movements: A window into haptic object recognition. Cogn. Psychol. 1987, 19, 342–368. [Google Scholar] [CrossRef]
- Roudaut, Y.; Lonigro, A.; Coste, B.; Hao, J.; Delmas, P.; Crest, M. Touch sense. Channels 2012, 6, 234–245, PMID: 23146937. [Google Scholar] [CrossRef]
- Johansson, R.S.; Flanagan, J.R. Coding and use of tactile signals from the fingertips in object manipulation tasks. Nat. Rev. Neurosci. 2009, 10, 345. [Google Scholar] [CrossRef]
- Bicchi, A. Hands for dexterous manipulation and robust grasping: A difficult road toward simplicity. IEEE Trans. Robot. Autom. 2000, 16, 652–662. [Google Scholar] [CrossRef] [Green Version]
- Correll, N.; Bekris, K.E.; Berenson, D.; Brock, O.; Causo, A.; Hauser, K.; Okada, K.; Rodriguez, A.; Romano, J.M.; Wurman, P.R. Analysis and Observations From the First Amazon Picking Challenge. IEEE Trans. Autom. Sci. Eng. 2018, 15, 172–188. [Google Scholar] [CrossRef]
- Guizzo, E.; Ackerman, E. The hard lessons of DARPA’s robotics challenge [News]. IEEE Spectrum 2015, 52, 11–13. [Google Scholar] [CrossRef]
- Belter, J.T.; Segil, J.L.; Dollar, A.M.; Weir, R.F. Mechanical design and performance specifications of anthropomorphic prosthetic hands: A review. J. Rehabil. Res. Dev. 2013, 50, 599. [Google Scholar] [CrossRef] [PubMed]
- Howe, R.D. Tactile sensing and control of robotic manipulation. Adv. Robot. 1993, 8, 245–261. [Google Scholar] [CrossRef]
- Kappassov, Z.; Corrales, J.A.; Perdereau, V. Tactile sensing in dexterous robot hands—Review. Robot. Auton. Syst. 2015, 74, 195–220. [Google Scholar] [CrossRef]
- Chen, W.; Khamis, H.; Birznieks, I.; Lepora, N.F.; Redmond, S.J. Tactile Sensors for Friction Estimation and Incipient Slip Detection—Toward Dexterous Robotic Manipulation: A Review. IEEE Sens. J. 2018, 18, 9049–9064. [Google Scholar] [CrossRef]
- Chen, Y.; Gao, Z.; Zhang, F.; Wen, Z.; Sun, X. Recent progress in self-powered multifunctional e-skin for advanced applications. Exploration 2022, 2, 20210112. [Google Scholar] [CrossRef]
- Sanchez, J.; Corrales, J.A.; Bouzgarrou, B.C.; Mezouar, Y. Robotic manipulation and sensing of deformable objects in domestic and industrial applications: A survey. Int. J. Robot. Res. 2018, 37, 688–716. [Google Scholar] [CrossRef]
- Song, X.; Liu, H.; Althoefer, K.; Nanayakkara, T.; Seneviratne, L. Efficient Break-Away Friction Ratio and Slip Prediction Based on Haptic Surface Exploration. IEEE Trans. Robot. 2014, 30, 203–219. [Google Scholar] [CrossRef]
- Dang, H.; Allen, P. Stable grasping under pose uncertainty using tactile feedback. Auton. Robot. 2014, 36, 309–330. [Google Scholar] [CrossRef]
- Bekiroglu, Y.; Laaksonen, J.; Jorgensen, J.A.; Kyrki, V.; Kragic, D. Assessing Grasp Stability Based on Learning and Haptic Data. IEEE Trans. Robot. 2011, 27, 616–629. [Google Scholar] [CrossRef]
- Teshigawara, S.; Tsutsumi, T.; Shimizu, S.; Suzuki, Y.; Ming, A.; Ishikawa, M.; Shimojo, M. Highly sensitive sensor for detection of initial slip and its application in a multi-fingered robot hand. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 1097–1102. [Google Scholar] [CrossRef]
- Cutkosky, M.R.; Ulmen, J. Dynamic Tactile Sensing. In The Human Hand as an Inspiration for Robot Hand Development; Springer Tracts in Advanced Robotics; Balasubramanian, R., Santos, V.J., Eds.; Springer-Verlag: Berlin, Germany, 2014; Volume 95, pp. 219–246. [Google Scholar] [CrossRef]
- Haddadin, S.; Albu-Schäffer, A.; Hirzinger, G. Requirements for Safe Robots: Measurements, Analysis and New Insights. Int. J. Robot. Res. 2009, 28, 1507–1527. [Google Scholar] [CrossRef]
- Melchiorri, C. Slip detection and control using tactile and force sensors. IEEE/ASME Trans. Mechatron. 2000, 5, 235–243. [Google Scholar] [CrossRef]
- Brock, D.L. Enhancing the dexterity of a robot hand using controlled slip. In Proceedings of the Proceedings. 1988 IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, 24–29 April 1988; pp. 249–251. [Google Scholar] [CrossRef]
- Kyberd, P.J.; Chappell, P.H. Object-slip detection during manipulation using a derived force vector. Mechatronics 1992, 2, 1–13. [Google Scholar] [CrossRef]
- Li, Q.; Schürmann, C.; Haschke, R.; Ritter, H.J. A Control Framework for Tactile Servoing. In Proceedings of the Robotics: Science and Systems (2013), Berlin, Germany, 24–28 June 2013. [Google Scholar] [CrossRef]
- Ho, V.A.; Nagatani, T.; Noda, A.; Hirai, S. What can be inferred from a tactile arrayed sensor in autonomous in-hand manipulation? In Proceedings of the 2012 IEEE International Conference on Automation Science and Engineering (CASE), Seoul, Korea, 20–24 August 2012; pp. 461–468. [Google Scholar] [CrossRef]
- Ho, V.A.; Hirai, S. A novel model for assessing sliding mechanics and tactile sensation of human-like fingertips during slip action. Robot. Auton. Syst. 2015, 63, 253–267. [Google Scholar] [CrossRef]
- Yussof, H.; Nur Ismarrubie, Z.; Makhtar, A.K.; Ohka, M.; Basir, S.N. Tactile Slippage Analysis in Optical Three-Axis Tactile Sensor for Robotic Hand. Appl. Mech. Mater. 2014, 465–466, 1375–1379. [Google Scholar] [CrossRef]
- James, J.W.; Pestell, N.; Lepora, N.F. Slip Detection With a Biomimetic Tactile Sensor. IEEE Robot. Autom. Lett. 2018, 3, 3340–3346. [Google Scholar] [CrossRef]
- Naeini, F.B.; Alali, A.; Al-Husari, R.; Rigi, A.; AlSharman, M.K.; Makris, D.; Zweiri, Y. A Novel Dynamic-Vision-Based Approach for Tactile Sensing Applications. IEEE Trans. Instrum. Meas. 2019, 69, 1881–1893. [Google Scholar] [CrossRef]
- Kyberd, P.J.; Evans, M.; te Winkel, S. An Intelligent Anthropomorphic Hand, with Automatic Grasp. Robotica 1998, 16, 531–536. [Google Scholar] [CrossRef]
- Francomano, M.; Accoto, D.; Guglielmelli, E. Artificial Sense of Slip—A Review. IEEE Sens. J. 2013, 13, 2489–2498. [Google Scholar] [CrossRef]
- Cranny, A.; Cotton, D.; Chappell, P.; Beeby, S.; White, N. Thick-film force and slip sensors for a prosthetic hand. Sens. Actuators A Phys. 2005, 123–124, 162–171. [Google Scholar] [CrossRef]
- Romano, J.; Hsiao, K.; Niemeyer, G.; Chitta, S.; Kuchenbecker, K. Human-Inspired Robotic Grasp Control With Tactile Sensing. IEEE Trans. Robot. 2011, 27, 1067–1079. [Google Scholar] [CrossRef]
- Shirafuji, S.; Hosoda, K. Detection and prevention of slip using sensors with different properties embedded in elastic artificial skin on the basis of previous experience. Robot. Auton. Syst. 2014, 62, 46–52. [Google Scholar] [CrossRef]
- Roberge, J.; Rispal, S.; Wong, T.; Duchaine, V. Unsupervised feature learning for classifying dynamic tactile events using sparse coding. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 2675–2681. [Google Scholar]
- Liu, W.; Nigg, B.M. A mechanical model to determine the influence of masses and mass distribution on the impact force during running. J. Biomech. 2000, 33, 219–224. [Google Scholar] [CrossRef]
- Min, F.; Wang, G.; Liu, N. Collision Detection and Identification on Robot Manipulators Based on Vibration Analysis. Sensors 2019, 19, 1080. [Google Scholar] [CrossRef] [Green Version]
- Yue, Z.; Mester, J. A Modal Analysis of Resonance during the Whole-Body Vibration. Stud. Appl. Math. 2004, 112, 293–314. [Google Scholar] [CrossRef]
- McMahon, T.A.; Cheng, G.C. The mechanics of running: How does stiffness couple with speed? J. Biomech. 1990, 23, 65–78. [Google Scholar] [CrossRef]
- Blickhan, R. The spring-mass model for running and hopping. J. Biomech. 1989, 22, 1217–1227. [Google Scholar] [CrossRef]
- Bullimore, S.R.; Burn, J.F. Ability of the planar spring–mass model to predict mechanical parameters in running humans. J. Theor. Biol. 2007, 248, 686–695. [Google Scholar] [CrossRef]
- Medel, F.; Abad, J.; Esteban, V. Stiffness and damping behavior of 3D printed specimens. Polym. Test. 2022, 109, 107529. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sandykbayeva, D.; Kappassov, Z.; Orazbayev, B. VibroTouch: Active Tactile Sensor for Contact Detection and Force Sensing via Vibrations. Sensors 2022, 22, 6456. https://doi.org/10.3390/s22176456
Sandykbayeva D, Kappassov Z, Orazbayev B. VibroTouch: Active Tactile Sensor for Contact Detection and Force Sensing via Vibrations. Sensors. 2022; 22(17):6456. https://doi.org/10.3390/s22176456
Chicago/Turabian StyleSandykbayeva, Danissa, Zhanat Kappassov, and Bakhtiyar Orazbayev. 2022. "VibroTouch: Active Tactile Sensor for Contact Detection and Force Sensing via Vibrations" Sensors 22, no. 17: 6456. https://doi.org/10.3390/s22176456
APA StyleSandykbayeva, D., Kappassov, Z., & Orazbayev, B. (2022). VibroTouch: Active Tactile Sensor for Contact Detection and Force Sensing via Vibrations. Sensors, 22(17), 6456. https://doi.org/10.3390/s22176456