3.2. Mathematical Preliminaries
Considering a FD DF relay, the following rates are achievable [
37],
in which, depending on how the IRS is applied to the system, the three following sets of rates are possible. First,
where
when the IRS is used to cancel the self interference. Second,
where
and
if the IRS is established to help the source–relay channel and finally
where
and
if the IRS is utilized to enhance the rate of the relay–destination channel. Notice that assuming that the RSI remains uncanceled, a robust transceiver against the worst-case RSI channel is required which is formulated as an optimization problem as follows
in which the throughput rate with respect to the worst-case RSI channel is maximized. Two constraints,
and
, represent the transmit power budgets at the source and the relay, respectively. In constraint (13c),
represents the RSI or the channel estimation error bound corresponding to
. Notice that
represents the sum of the squared singular values of
. It should be noted that using a bounded matrix norm is the most common way for modeling the uncertainty of a matrix [
38,
39]. In practice,
can be found using stochastic methods when the distribution of the channel error is known. Otherwise, one may find it using a sample average approximation method. Finally, constraints (13d) are due to the unit modulus limitation of the IRS elements.
The problem (
13) is non-convex and hard to solve. As a result, for each of the above-mentioned scenarios, we propose a simplified version of the optimization problem and try to solve it instead. Note that as we are interested in finding the throughput corresponding to the worst-case RSI, any simplification in the optimization problem should be in favor of the RSI and interference. First, we analyse the performance of the system when the IRS is helping the relay cancel the RSI. Consequently, we show that the problem (
13) can be simplified to the following optimization problem
where
and where
denotes the vector of all non-zero elements of its input matrix. We can equivalently write
as
where ∗ denotes a column-wise Khatri–Rao product defined as below
and where
is the
i’th column of
A, and ⊗ denotes the Kronecker product. See
Appendix A for proof.
One can show that
. As mentioned before, problem (14) is a simplification of problem (
13). This means every achievable rate which is inside the feasible set of (14) is also inside the feasible set of (
13) (Notice that the reverse is not necessarily true, i.e., every achievable rate which is a feasible solution of (
13) is not necessarily a feasible solution for (14) as well. However, as we look for achievable rates, we can still use this method). The reason is that in problem (
13), the minimization over RSI happens only one time, and the worst-case RSI simultaneously tries to cancel the effect of the best configuration of IRS and the best covariance matrices. In (14), first, the RSI does its worst damage on the performance of the best IRS configuration and after that performs another optimization to bring the worst power allocation against the best covariance matrices (This will be clearer later on when the geometrical representation of the problem is given). In what follows, we provide our proposed ways to deal with optimization problems (14) and (15), respectively.
Theorem 1. For the optimization problem (14), one can show that .
Proof. We begin the proof with an intuitive example and then extend it to the more general case. Assume that
and
. Then we have
In addition, consider the following optimization problem
Here, notice that
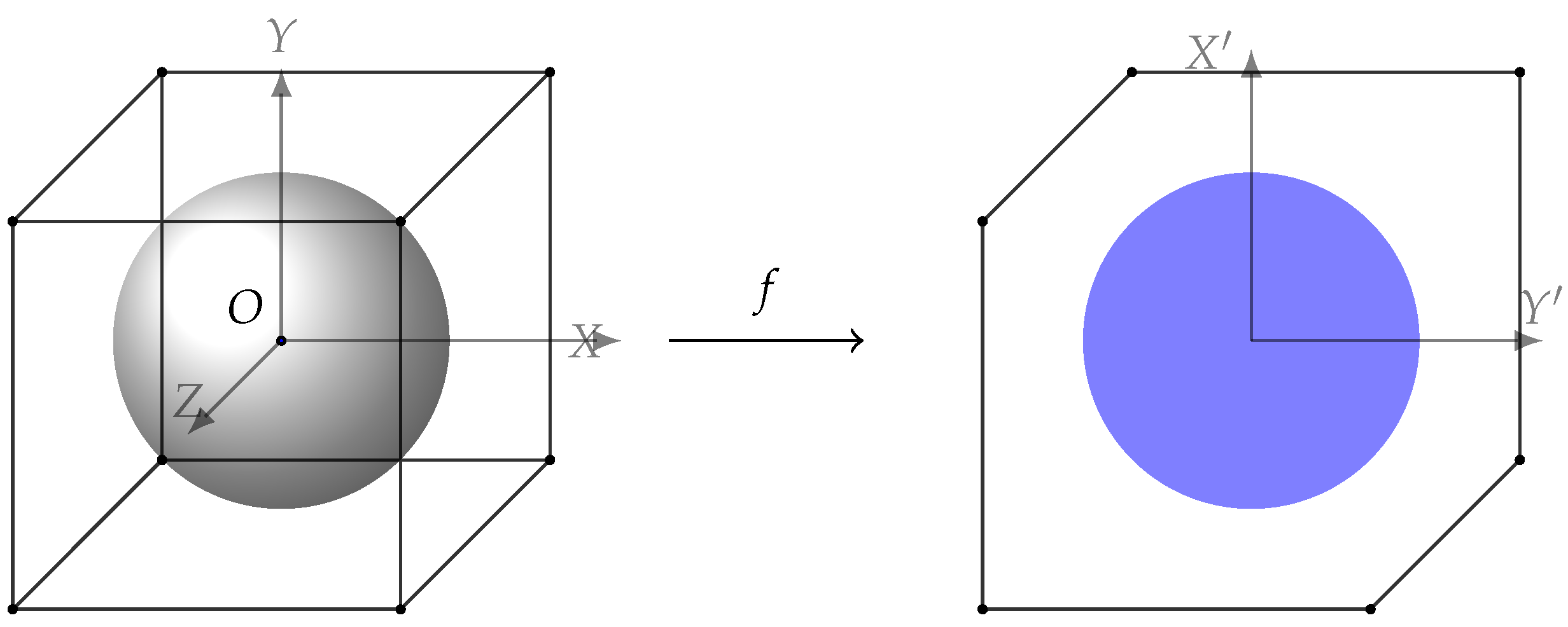
is a linear map from a three-dimensional into a two-dimensional space. One simple example of such a mapping can be found in
Figure 2. Here, an example of mapping from a three-dimensional to a two-dimensional space is shown. The left shape shows the feasible set for the IRS with three elements in a real valued space. The cube belongs to the case of
, i.e., constraints
, while the sphere shows the constraint
which belongs to
. On the right, the feasible sets belonging to the two aforementioned regions after performing mapping
f are presented as an example. It can be seen that the mapping of the first set of constraints (the hexagon) covers the whole area of that of the second one (the ellipse). One important key is, as mapping is a linear function, we have
, where
and
are two arbitrary sets and
f is the mapping.
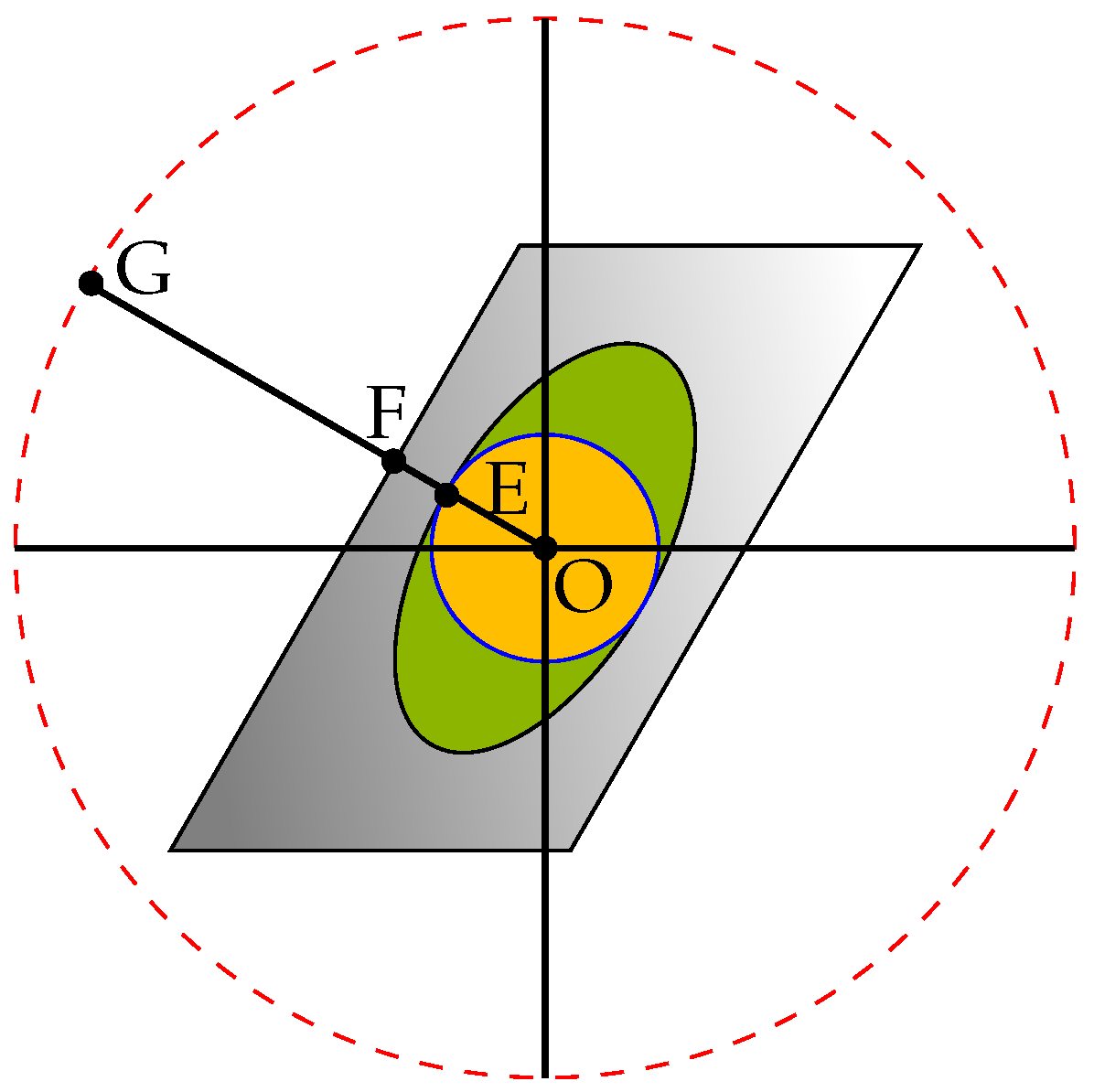
In general, as the number of IRS elements or the dimensions of
increase, the mapping of the hypercube becomes more and more complicated and finding the optimal distance becomes more difficult. However, there is an upper bound for this distance. As shown in
Figure 3, if instead of the cube, we limit the feasible set of IRS elements to the sphere inside the cube, i.e., replacing (18b) with (19b), the solution to the problem becomes
. It turns out that finding
is very simple as by the definition we have
, and also we know that
. Therefore, we can conclude
. Finally, we use one last upper bound to make the original problem even easier to solve. Note that if instead of the ellipse, we consider the circle inscribed in it, we will have
. As a result, we have
where
. It is worth mentioning that the geometrical representation for the optimization problem (
13) is different because there, considering that the RSI wants to bring the worst representation against the IRS configuration and covariance matrices simultaneously, the RSI cannot freely span the whole circle. This is due to the fact that some regions in the circle might not be a good choice when it comes to RSI design against covariance matrices. However, if the best representation of RSI against the covariance matrices also provides the best RSI against the IRS configuration, the solution to (14) and (
13) will be the same. Eventually, instead of optimization problem (
13), one can solve optimization problem (14). The solution to the new problem is guaranteed to be achievable by the original problem as well.
Notice that one can readily extend this interpretation into the complex domain, as the constraint (19b) will still be a subset of constraints (18b). It remains to show one can generalize the geometrical proof for arbitrary large dimensions. This means that the channel dimensions and the number of IRS elements can be any natural numbers. Interestingly, it is enough to show that the geometrical proof based on
norms and Euclidean distance exists for higher dimensions. This proof is given in
Appendix A where it is shown
. □
Next we solve problem (14). Solving this problem is hard in general as it is non-convex. Hence, we first use the following lemma and theorem to solve it. There, it is shown that for every possible choice of and , there exists at least one set of simultaneously diagonalizable matrices , and that are the solutions to the problem (14).
Lemma 1. For two positive semi-definite and positive definite matrices and with eigenvalues and , respectively, the following inequalities hold, Proof. Consider Fiedler’s inequality given by [
40],
Furthermore, given
as a positive definite matrix, the following are true,
Now, dividing the sides of (22) by
, one can readily obtain (21). □
Note that in (21), the inequalities hold with equality if and only if
and
are diagonalizable over a common basis. Using the result of Lemma 1,
can be lower-bounded as
In addition, it holds that
. Hence, we obtain
Note that the inequality holds with equality whenever
and
share a common basis. Next, we use the following inequality
The above inequality holds true since .
Now, instead of completing the minimization over the left-hand side (LHS) of Equation (26), we can first minimize the right-hand side (RHS) of Equation (27) to find an achievable rate. Similarly, for
we have
Remark 1. Having the equality , one can generally conclude the rule of multiplication is determinant, i.e., . Further, using the properties of determinants we can also conclude where is a random permutation of i and indicates that there is no need for to be in decreasing order. However, one cannot generally conclude , unless and share common basis.
As a result of Remark 1, in general, we cannot rewrite (26) in terms of , , and . However, if we show that for every choice of , there exists a matrix with properties: (1) ; (2) and 3) ; then we can use instead and rewrite (26) in terms of and to simplify the problem. The first property implies that both and have the exact same impact on the capacity. Hence, if we find a which is the solution to the problem (14), its corresponding will also be a solution. The second property means, unlike , actually shares the common basis with . The last property implies that is at least as good as in terms of power consumption. Observe that if we show for every feasible there exists at least one such , then we can solve the problem (14) in a much easier way. The reason is, in such a case, instead of searching for optimal over the whole feasible set, we can search for the optimal . Unlike , finding does not need a complete search over the whole feasible set since shares a common basis with . Therefore, we can limit our search only to the portion of the feasible set in which the matrices have eigendirections identical to those of . Similarly, if we show for every choice of , there exist at least one for which we have three conditions , and , we can simplify our search to finding instead of . In the next theorem, we show that such and exist.
Theorem 2. For all matrices and , there exists at least one matrix that satisfies the following conditions,where is a random permutation of i and indicates that there is no need for to be in decreasing order. For the sake of simplicity, we use the following notions for the rest of the paper,
Now, using Theorem 2 alongside Lemma 1, we infer that with no loss of generality, instead of optimising over matrices, one can complete the optimization over eigenvalues to find the optimal value for RSH of (27). Then we have
Note that the two additional constraints (37d) and (37e) need to be satisfied due to the conditions of Lemma 1 (i.e., eigenvalues have to be in decreasing order). Interestingly, these two additional constraints are affine. The above optimization problem can further be simplified using the following lemma,
Lemma 2. The objective function of the optimization problem (37) is optimized when the constraints (37a) and (37c) are satisfied with equality.
Proof. Intuitively, as the objective function is an increasing and decreasing function of each element of
and
, respectively, at convergence, the constraints are met with equality. See
Appendix C for the proof. □
3.3. Algorithm Description
In this subsection, our proposed algorithm is given. In short, it works as follows. First, based on the task of the IRS in the system, we compute the effect of IRS on the RSI, source–relay and/or relay–destination channel links. After that, we design the best signal design for the source and relays transmitters with the objective of maximizing the throughput. In the rest of this subsection, the detailed explanation of the algorithm is given. First, we need to solve the optimization problem (37). It can be readily shown that
is a monotonically increasing function of
. Furthermore, one can show that
is an increasing function with respect to
and a decreasing function with respect to
and
(See
Appendix D). Consequently, the worst-case RSI chooses a strategy to reduce the spectral efficiency, while the relay and the source cope with such strategy for improving the system robustness. That means, on one hand, the RSI hurts the stronger eigendirections of the received signal space more than the weaker ones. However, on the other hand, the source tries to cope with this strategy adaptively by smart eigen selection. This process clearly makes the optimization problem complicated at the source–relay hop. Unlike the source–relay hop, the resource allocation problem at the relay–receiver hop is rather easy. Since at the relay–receiver hop there is only one maximization, we can find the sum capacity simply by using the well-known water-filling algorithm.
Observe that although finding each
and
separately is a convex problem, the problem (37) as a whole is not convex. Therefore in this paper, we find the optimal
by keeping
fixed. Then we use the resulting
to find optimal
and again, using the new resulted
to find optimal
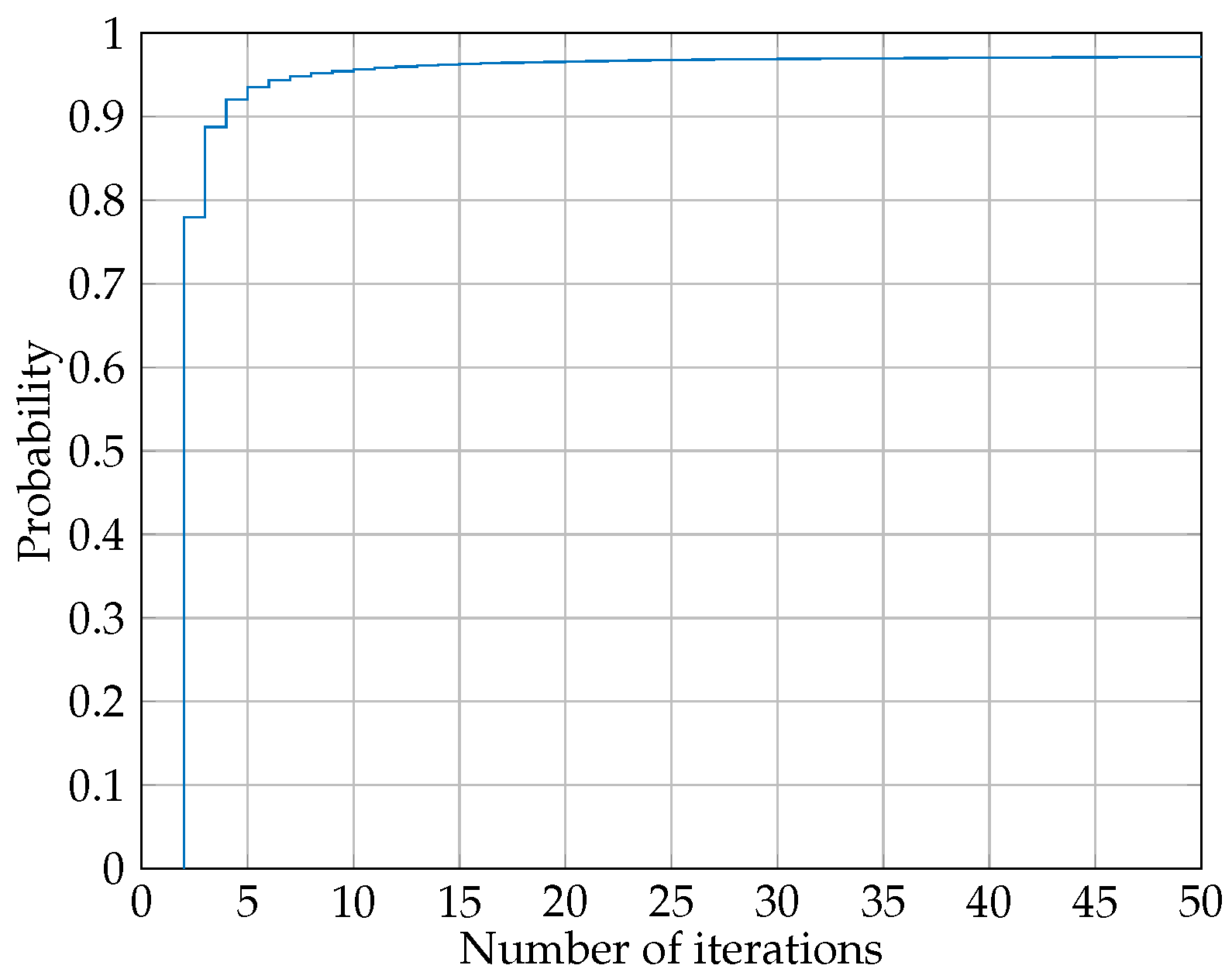
. This iterative process repeats until the convergence. Our simulation showed that the algorithm has a very fast convergence and only in rare cases does it take more than 20 iterations for the algorithm to converge. This is mainly due to the fact that inequalities (37d) and (37e) restrict the eigenvalues to vary up to a certain limit, which in turn, makes the whole outputs more stable.
Figure 4 depicts a typical histogram of iterations. As it can be seen, only less than
of cases did not converge until 50 iterations.
Notice that the optimum values for the transmission power on relay hop may not sum to . The reason is that is a monotonically decreasing function of and as we are interested in the , with we will have . Therefore, it is in our interest to keep as low as possible to increase as much as possible. Analogously, in the case of we have which can be increased by increasing the total power usage of relay’s transmitter. As a result, the well-known bisection method can be used to find the optimal rate where we have , unless the case happens even if the maximum allowed power is used at the relay transmitter. In such a case, the relay–destination link becomes the bottleneck.
Now we focus on how to find
. In order to find the sum rate for the source–relay hop, we assume that we are already given
which is the vector of relay input powers that maximizes the sum rate at the relay–destination hop. The next step is to complete the minimization over
and the maximization over
. One approach to solve this problem is to solve it iteratively. With this method, first one finds the optimal
by solving the maximization part of (37) under the assumption that the optimal
is given, and then, having the optimal
, the minimization part of (37) can be solved efficiently. This process goes on until the convergence of
and/or
. The maximization part is performed using the water-filling method. However, the additional conditions
should be taken into account. For instance, if the optimal value for
turns out to be equal to zero, then we should have
for all
irrespective of their SNR.
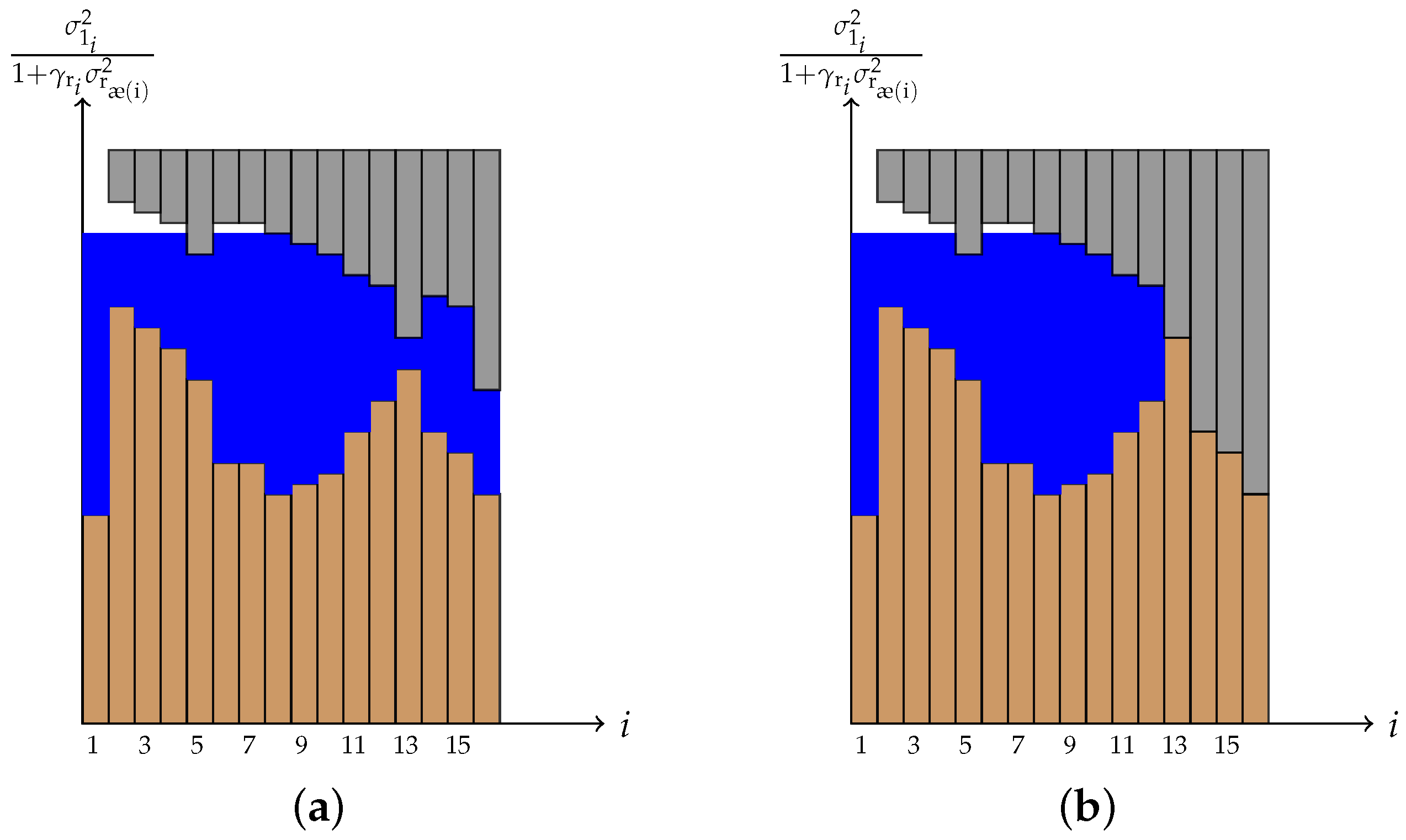
Figure 5 depicts two different examples of multi-level water-filling algorithms. As it can be seen, first, a regular water-filling algorithm is considered where for each subchannel we have
as its channel gain. After finding the water-level in this way, we need to impose
. These additional restrictions act like caps on top of the water and create multilevel water-filling which can be interpreted as a cave.
Figure 5a shows the case where these caps do not make any subchannel to have zero power. However,
Figure 5b shows the case where subchannel
has to be zero as a result of the cap imposed by the additional constraints (37d). In this case, we have
, and as a result
. Thus, this condition forces all other subchannels (i.e.,
) to get no power. Algorithm 1 provides the detail of multilevel water-filling. For the minimization part, a Lagrangian multiplier is used. We have
Calculating
we arrive at
where
is the water level.
Similarly to the maximization case, there are additional constraints
that must be considered during the minimization process. However, it can be shown that if the constraints
and
are met, then the constraint
becomes redundant. Please refer to
Appendix E for proof. The summary of the algorithm to find the achievable rate can be found in Algorithm 2. Next we deal with the optimization for the cases where IRS is utilized to help either the source–relay or relay–destination channels. In such cases, the optimization part over the covariance matrices remains the same as the abovementioned case. In addition, the optimization of the IRS elements can be performed using eigenvalue decomposition and the algorithm introduced in [
8]. Notice that for the case in which IRS is assisting the source–relay link, the term
in (27) should be replaced with
, and for the case where IRS helps the relay–destination link, the term
in (28) should be replaced with
. The pseudo code for these scenarios is given in Algorithm 3.
| Algorithm 1 The optimal |
- 1:
Find power allocation using water-filling algorithm - 2:
while is large do - 3:
Define - 4:
for i do - 5:
Calculate - 6:
if then - 7:
- 8:
- 9:
end if - 10:
end for - 11:
- 12:
end while
|
| Algorithm 2 Robust Transceiver Design for FD scenario, the first case |
- 1:
Define , , - 2:
while is large do - 3:
Determine , s.t. - 4:
Define and and - 5:
Set - 6:
while is large do - 7:
Obtain , using Equation (39) - 8:
Obtain , using Algorithm 1 - 9:
- 10:
end while - 11:
Calculate and - 12:
if then - 13:
- 14:
else if then - 15:
- 16:
end if - 17:
- 18:
end while
|
| Algorithm 3 Robust Transceiver Design for FD scenario, the second and third case |
- 1:
Define , , - 2:
Define if the IRS is being used help the source–relay link or if IRS is being used to help the relay–destination link - 3:
while is large do - 4:
Determine , s.t. - 5:
Define and and - 6:
if then - 7:
- 8:
Find the optimum , using Algorithm 1 in [ 8] - 9:
else if then - 10:
- 11:
Find the optimum , using Algorithm 1 in [ 8] - 12:
end if - 13:
Obtain , using Algorithm 1 - 14:
- 15:
end while - 16:
Calculate and - 17:
ifthen - 18:
- 19:
else ifthen - 20:
- 21:
end if - 22:
|


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}